")
Руководство: Как собрать FPV-дрон (аналоговая система FPV)
Содержание
- Основы
- Этапы сборки FPV-дрона
- 1. Сборка рамы
- 2. Установка двигателей
- 3. Схемы подключения
- 4. Установка ESC
- 5. Проверка ESC и двигателей
- 6. Настройка приёмника
- 7. Установка аналоговой FPV-системы
- 8. Завершение сборки
- 9. Использование 3D-печатных деталей
- 10. Настройка Betaflight
- 11. Настройка квадрокоптера
- 12. Обучение полётам
- Улучшения и модернизация
Введение
В этом руководстве я проведу вас через процесс сборки 5-дюймового FPV-дрона с использованием аналоговой системы FPV. Здесь будет рассказано всё — от выбора правильных компонентов до подключения и сборки, а также даны советы и рекомендации, чтобы ваш FPV-дрон работал надёжно.
↑ К оглавлениюОсновы
Погружаясь в мир FPV-дронов, вы столкнётесь с различными аббревиатурами и технической терминологией. Не пугайтесь этих терминов! Просто обратитесь к нашему подробному глоссарию: Глоссарий терминов FPV.
Имея эти ресурсы под рукой, вы вскоре станете настоящим экспертом в области FPV-дронов.
↑ К оглавлениюСписок компонентов
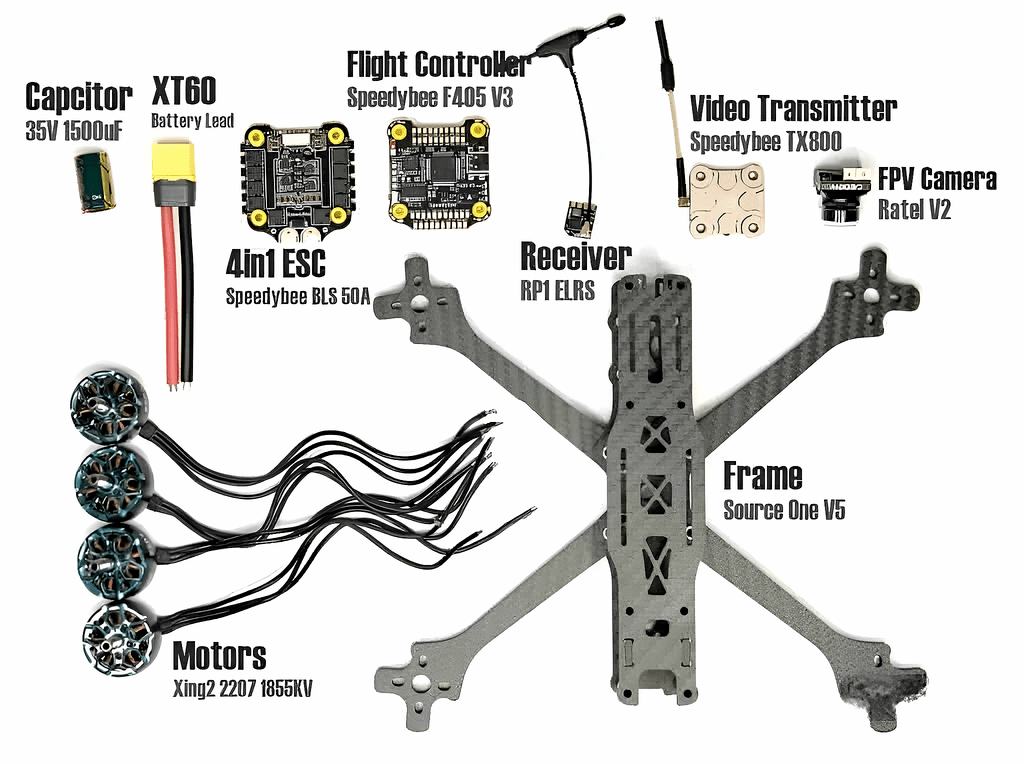
В этом руководстве мы будем использовать следующие компоненты для сборки дрона.
В этой сборке я сосредоточусь на аналоговой FPV-системе. Если вы хотите узнать больше о системе DJI O4 Pro, ознакомьтесь с этим журналом сборки: Как собрать FPV-дрон.
Основные инструменты и материалы
Помимо перечисленных выше компонентов, вам понадобятся инструменты и расходные материалы. Возможно, у вас уже есть некоторые из этих предметов, но их можно легко найти в местном хозяйственном магазине или онлайн, если у вас их нет:
- Паяльник и припой
- Набор шестигранных отвёрток
- Маленькая отвёртка с крестообразным шлицем
- Пара ножниц для зачистки и разрезания проводов
- Изолента
- Двусторонняя пенопластовая лента
- Цифровой мультиметр
- Коллекция стяжек шириной 2 мм (идеально подходят длиной 15 см или более
- Хлопчатобумажная лента (ширина 15 мм идеальна, отлично подходит для обмотки проводов моторов, хотя вместо неё можно использовать изоленту
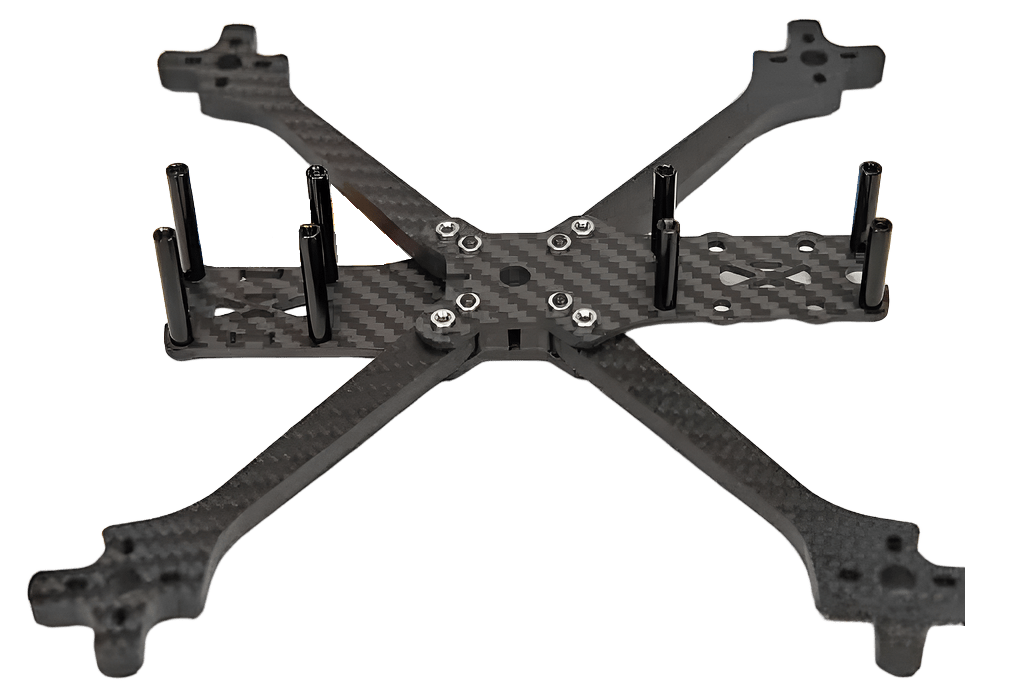
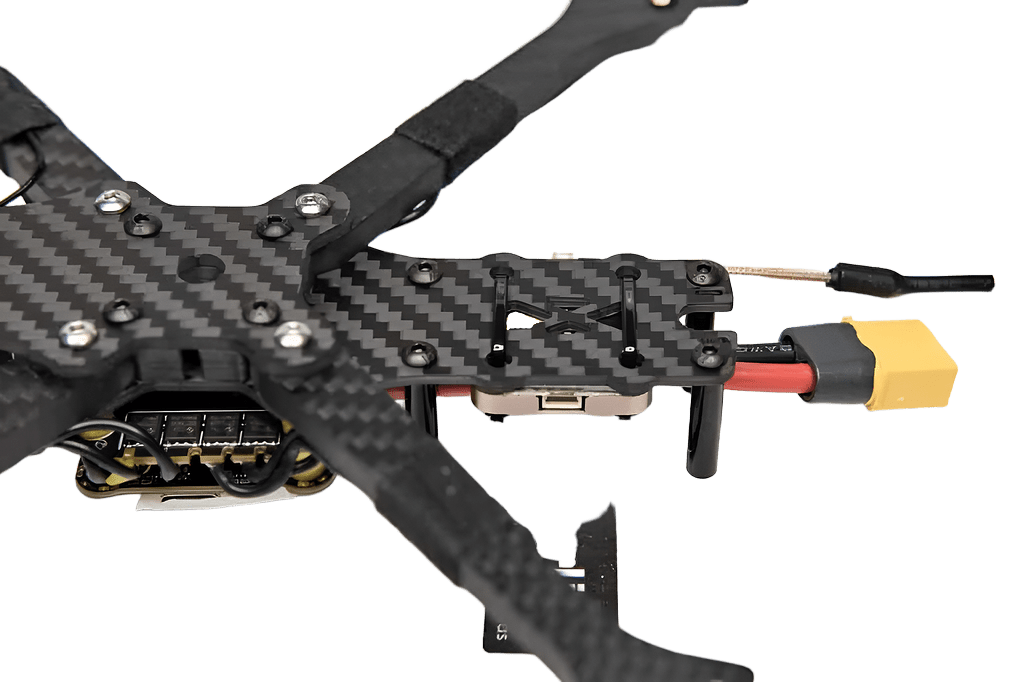
Рама

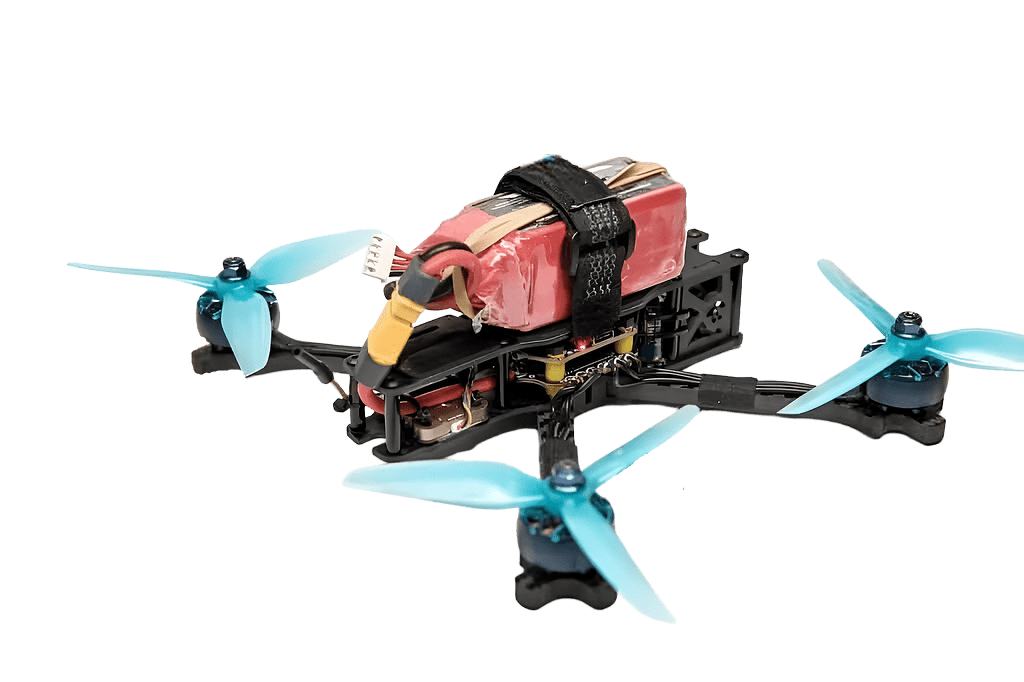
Рама — это прочная конструкция, которая удерживает все компоненты.
Для этого руководства я выбрал раму TBS Source One V5, отличный выбор благодаря её доступности и открытому дизайну. Со временем дизайн совершенствовался благодаря постоянным обновлениям от сообщества, что обеспечило совместимость с современным оборудованием, оптимизировал производительность и удобство использования.
Ещё одним преимуществом Source One является наличие множества бесплатных проектов для 3D-печати на Thingiverse. Эти проекты позволяют ещё больше улучшить и настроить сборку вашего FPV-дрона.
Ещё одним хорошим вариантом будет Axisflying Manta 5 SE, немного более дорогой, но со своими аксессуарами он того стоит.
Полётный контроллер и регулятор скорости (FC и ESC)
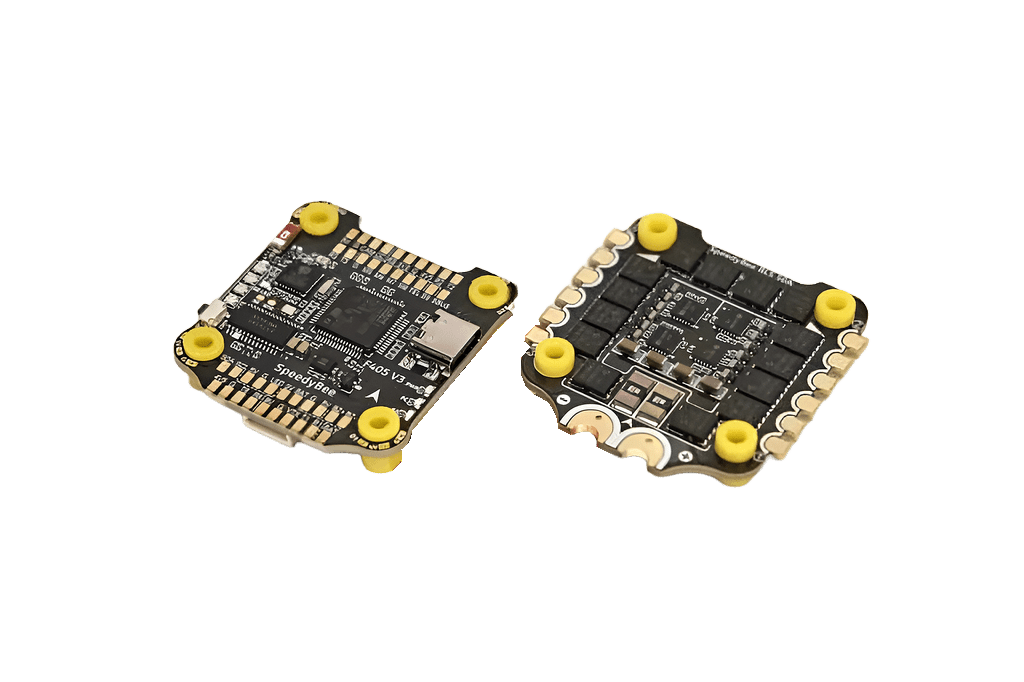
При покупке полётного контроллера и регулятора оборотов (ESC) выбирайте сразу «стек». Он включает в себя и плату управления, и 4-в-1 плату регулятора оборотов ESC, которые готовы к работе прямо из коробки, упрощая подключение и пайку. Также обычно дешевле покупать их вместе, чем по отдельности.
Для этого руководства я выбрал Speedybee F405 V4, поскольку это один из лучших стеков на рынке в 2025 году. Он предлагает широкий набор функций, включая встроенный Bluetooth для настройки Betaflight с телефона и многое другое!
Моторы

Хотя популярные моторы аналогичных размеров часто имеют схожую производительность, ключевым фактором обычно является качество изготовления. Для 5-дюймового FPV-дрона подходящими вариантами являются моторы размером 2306, 2207 и 2208 — я выбрал 2207 для этого руководства.
Ещё одним важным фактором является KV мотора, который определяется напряжением батареи. Для 6S LiPo рекомендуемые значения KV находятся в диапазоне от 1600 до 2000, при этом более высокие значения KV обеспечивают лучшую производительность, но потребляют больше энергии. В этой сборке мы используем моторы с KV 1855, так как я планирую использовать 6S LiPo батарею.
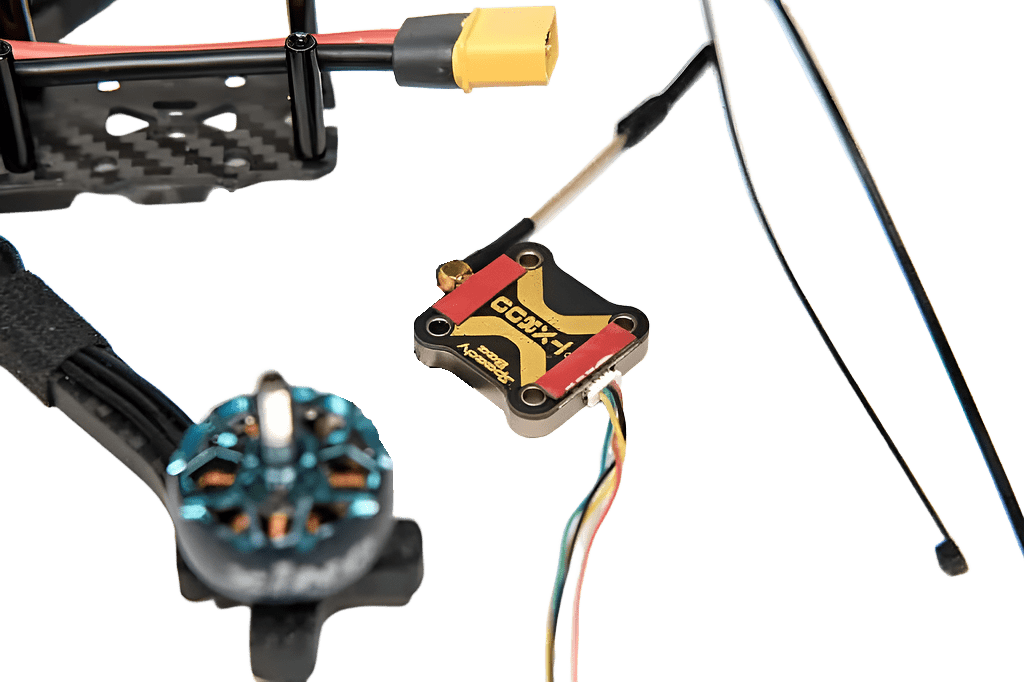
FPV-система
В этом руководстве мы расскажем об установке и настройке аналоговой FPV-системы.
Для аналоговой сборки мы будем использовать Speedybee TX800 — недорогой и высокопроизводительный передатчик, который легко устанавливается в раму Source One.
Приёмник радиосигнала

Выбор радиопередатчика определяет тип приёмника (RX), который вы можете использовать. Если вы следовали рекомендациям по выбору радио, ваше радио должно поддерживать ExpressLRS, который в настоящее время является лучшим вариантом связи в 2025 году. ExpressLRS — это недорого, высокопроизводительно и невероятно надёжно!
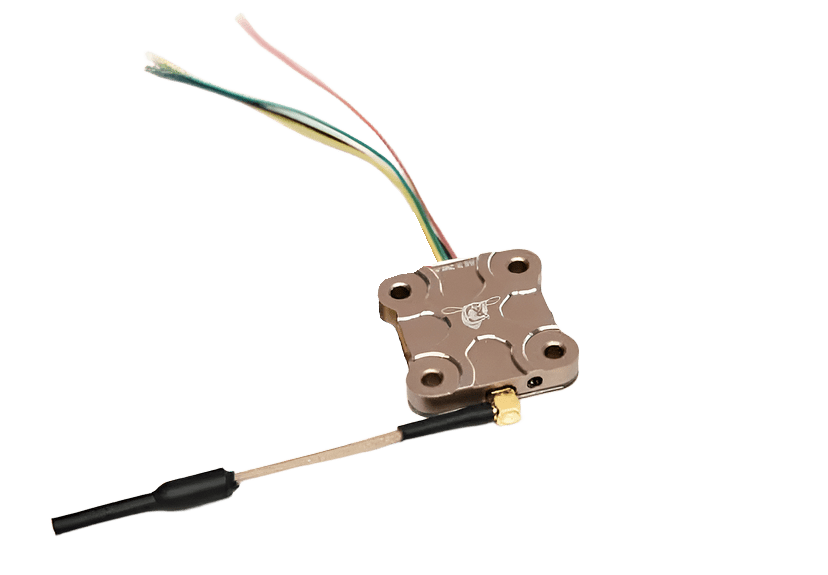
Множество производителей выпускают приёмники и передатчики для ExpressLRS. Вы можете выбрать любой из них, и пока они поддерживают ExpressLRS, они будут работать вместе. Для этого руководства я выбрал приёмник Radiomaster RP1, которым пользуюсь несколько месяцев. Он демонстрирует отличную производительность и постоянно находится в наличии.
↑ К оглавлениюДругое оборудование
Чтобы управлять квадрокоптером в режиме FPV, вам понадобятся следующие аксессуары. Ознакомьтесь с моим повседневным снаряжением для вдохновения. Вот краткий обзор:
- Радиопередатчик: радиопередатчик необходим для управления вашим дроном. В 2025 году я рекомендую Radiomaster Boxer или TX16S MKII, поскольку оба предлагают отличное соотношение цены и качества.
- Очки FPV: очень хороший выбор аналоговых очков прямо сейчас — это Skyzone SKY04X.. Если у вас бюджет ограничен, Skyzone Cobra SD - недорогой вариант очков из коробки.
- LiPo-аккумуляторы: для этой сборки идеально подходят 6S LiPo-аккумуляторы ёмкостью 1000–1300 мА·ч.
- Зарядное устройство для батареи: вам понадобится зарядное устройство. Мой выбор ToolkitRC Q6AC - выделяется своей мощностью 1000 Вт и 4-канальной конструкцией.
Разные расходные материалы:
- Паяльник
- Припой
- Провода (28 AWG)
- Шестигранный набор отвёрток (необходимые размеры: 1,5 мм, 2,0 мм и 2,5 мм)
- Фиксатор резьбы (рекомендуется — для закрепления винтов моторов)
- Стяжки 2 мм (для закрепления проводов и компонентов на раме)
- Двусторонняя пенопластовая лента (для закрепления компонентов на раме)
- Хлопчатобумажная или изолента (для закрепления проводов моторов)
- Мультиметр или/и VIFLY ShortSaver V2 (для проверки безопасности перед первым подключением батареи)
- Инструмент для зачистки проводов (можно обойтись ножницами)
- Силиконовый электрический провод 28 AWG (для пайки компонентов к FC)
- Амортизационная подкладка для батареи (по желанию)
- Инструмент для затягивания гаек пропеллера (по желанию)
Этапы сборки FPV-дрона
1. Сборка рамы
Перед началом сборки рекомендуется подготовить раму (хотя этот шаг не обязателен):
- Зачистите острые края углеволоконных деталей, особенно с внешней стороны лонжеронов и пластин. Острые края могут перерезать провода или стропы аккумулятора при аварии. Фаска также помогает уменьшить расслоение углеволокна при ударах.
- Промойте все углеволоконные детали в мыльной воде, чтобы удалить остатки угольной пыли, которая остаётся после резки, сверления и шлифовки (имейте в виду, что углеволокно является токопроводящим). После этого тщательно вытрите детали полотенцем.
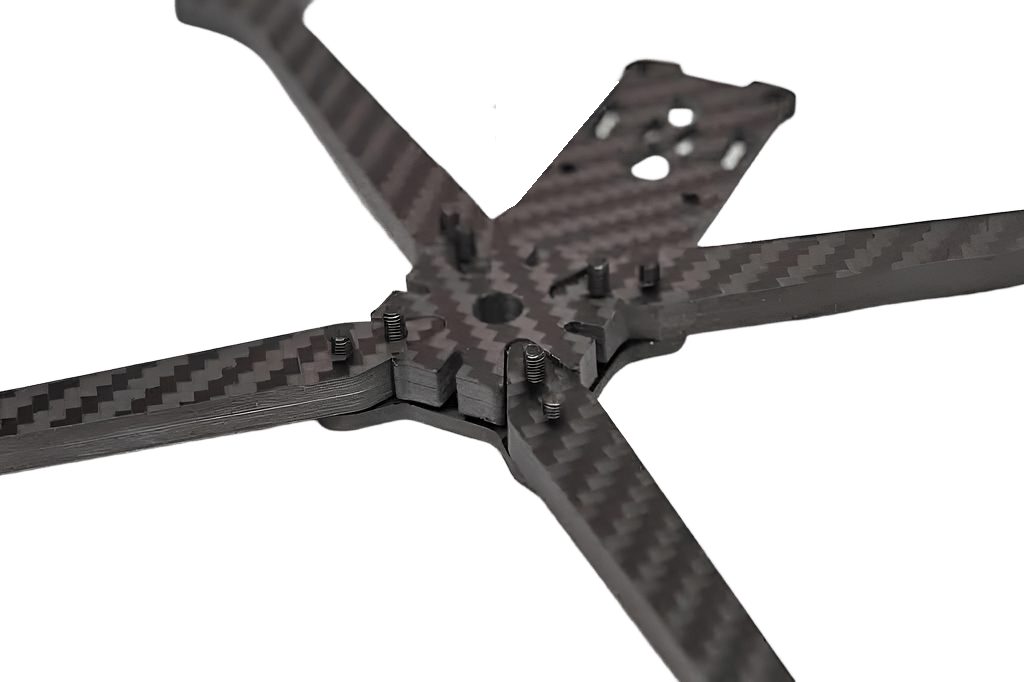
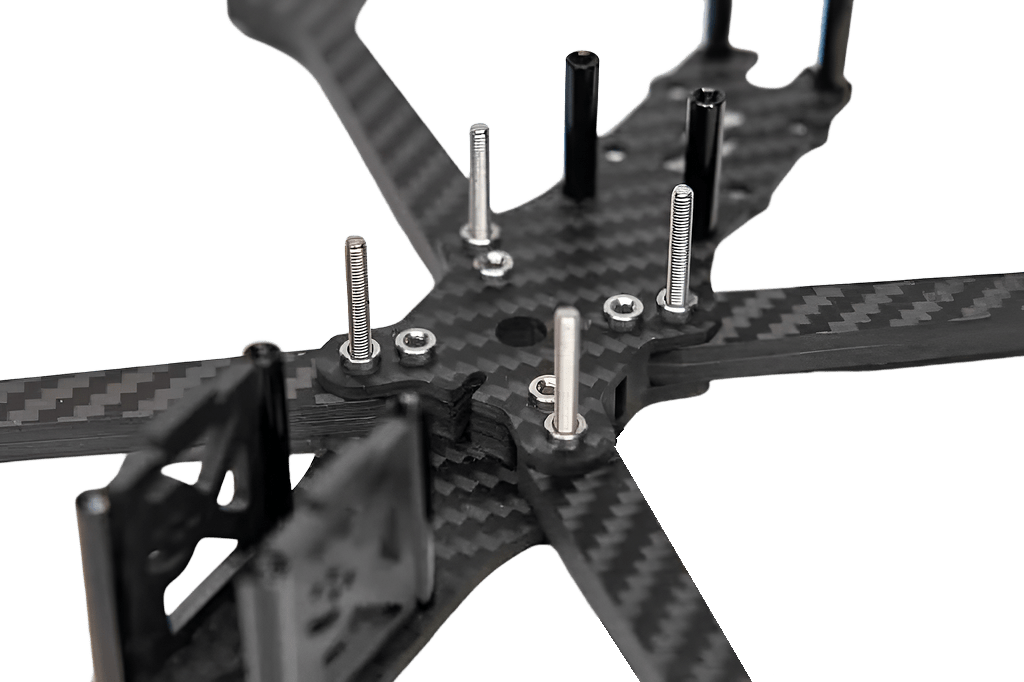
Чтобы собрать раму, начните с размещения лонжеронов и фиксирующего замка поверх передней нижней пластины. Затем поместите заднюю нижнюю пластину (с резьбовыми втулками) сверху на лонжероны и закрепите её винтами снизу. Наконец, установите восемь алюминиевых стоек, обращая внимание на их разную высоту — передние четыре стойки длиннее.
↑ К оглавлению
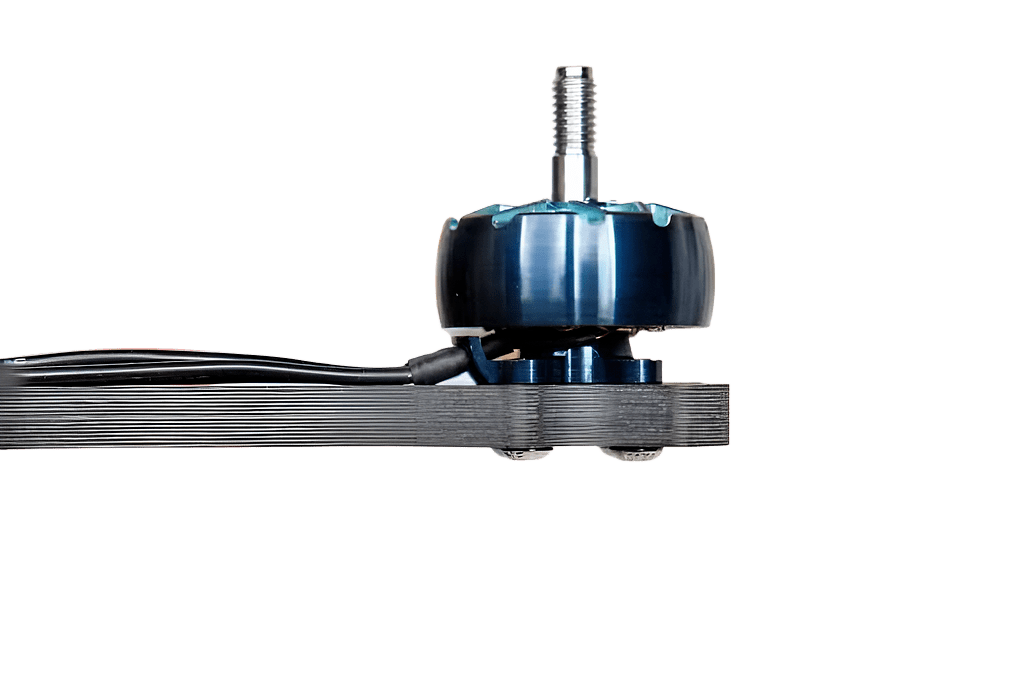
2. Установка двигателей
Теперь пора закрепить четыре двигателя на лонжеронах. Рекомендуется использовать фиксатор резьбы на винтах двигателей, поскольку вибрации от двигателей со временем могут ослабить винты. К счастью, винты, которые поставляются с двигателями Xing2, уже имеют нанесённый фиксатор резьбы, поэтому дополнительное нанесение не требуется.

Толщина лонжеронов составляет 6 мм, что делает длину винтов 8 мм идеальной. Использование шайб не требуется.

Если вы используете обычные винты, обязательно возьмите Loctite (фиксатор резьбы). Выбирайте синий жидкий тип, так как красный предназначен для постоянного использования и может затруднить удаление винтов в будущем.

Важно также убедиться, что винты двигателей не слишком длинные и не касаются обмоток двигателя.
↑ К оглавлению
3. Схемы подключения
Перед продолжением рекомендуется создать схему подключения на бумаге, чтобы понять, как соединить все компоненты. Если вы используете те же самые компоненты, что и я, ниже приведены диаграммы подключения, которыми можно руководствоваться.
Для аналоговой сборки:
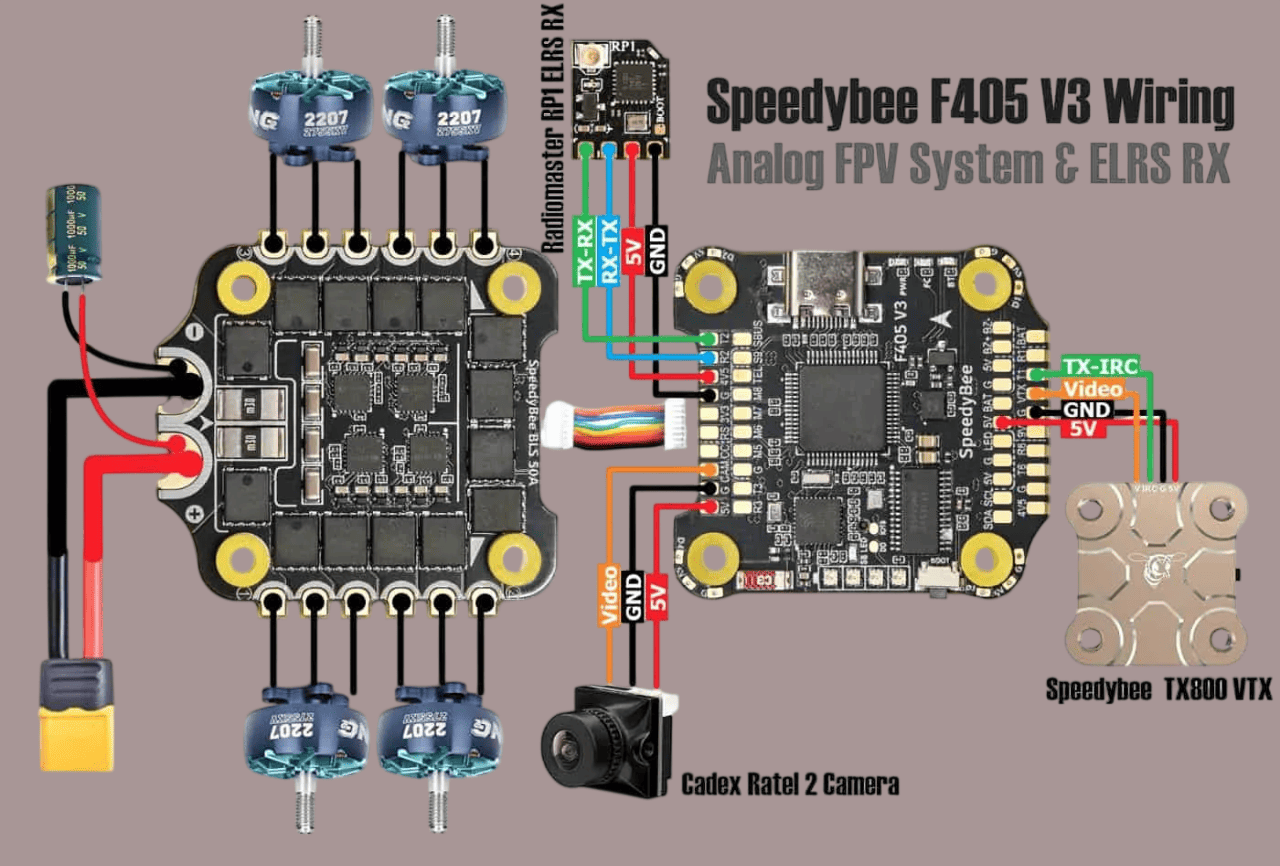
Перед пайкой проводов можно выполнить "сухую" сборку всех компонентов внутри рамы. Этот процесс позволяет определить длину проводов, расположение компонентов и возможные проблемы с пространством.
↑ К оглавлению
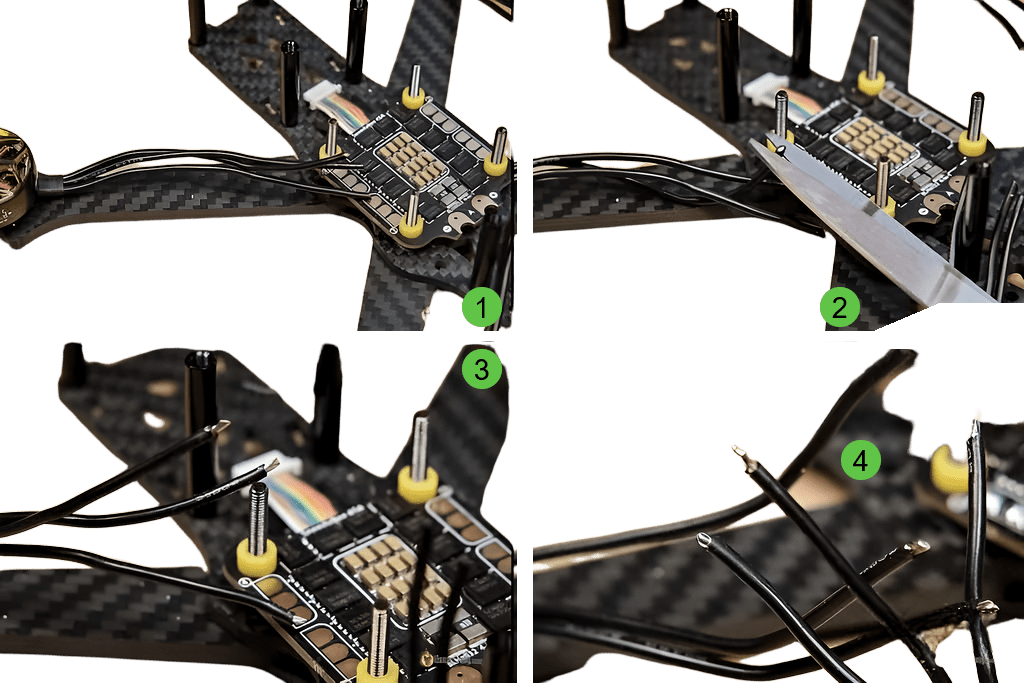
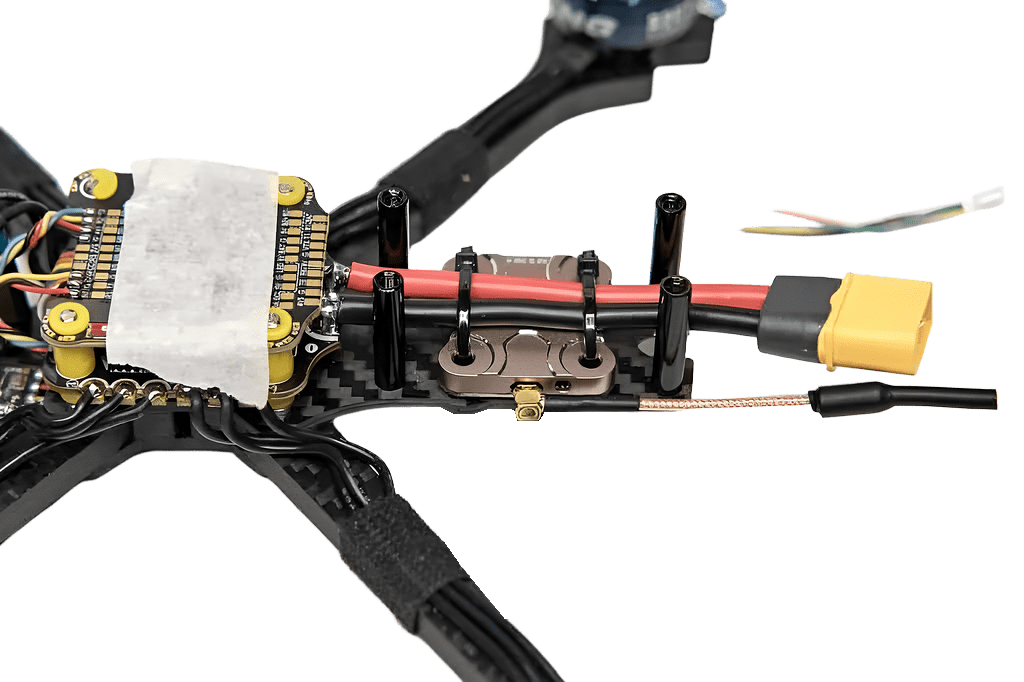
4. Установка ESC
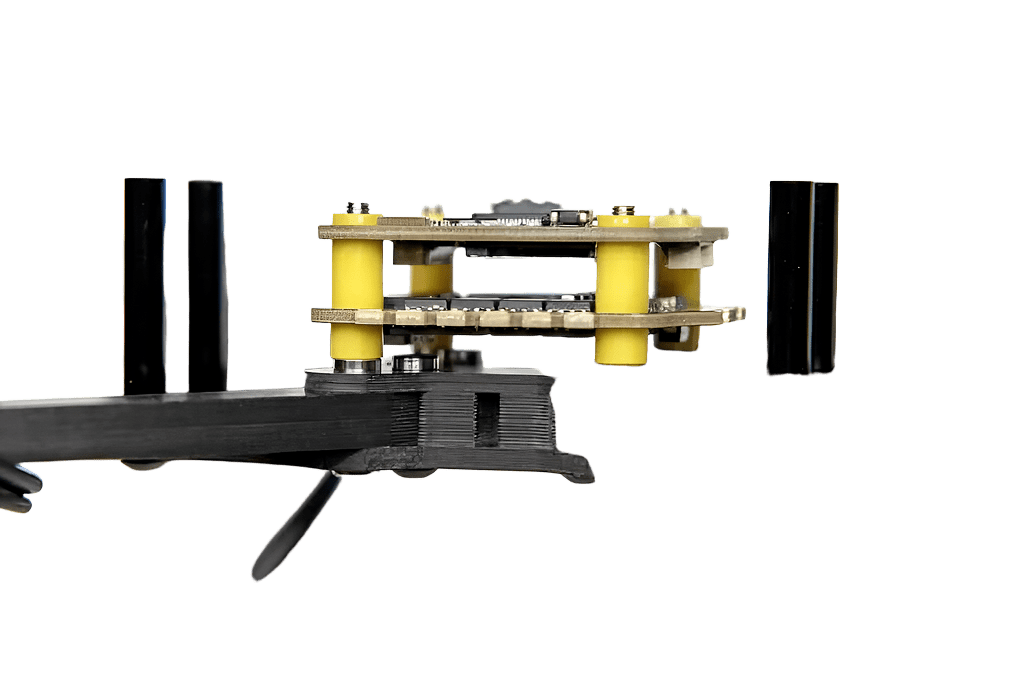
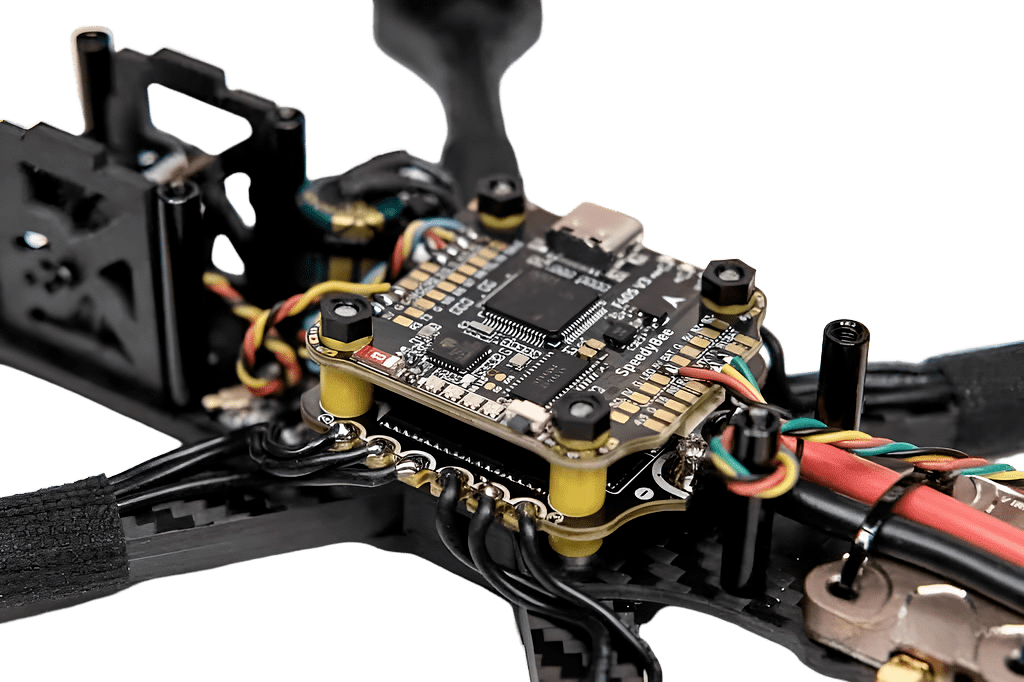
Начните с замены четырех коротких винтов в раме на длинные болты M3 30 мм, которые идут в комплекте со стеком Speedybee F405 V3. Избегайте использования нейлоновых стоек для установки FC, ESC и VTX, они легко ломаются при столкновениях. Вместо них используйте металлические болты. Используйте металлические болты для установки стека (с металлической гайкой в нижней части), это уменьшает вибрацию и шатание, делает дрон лучше летающим и легче настраиваемым.
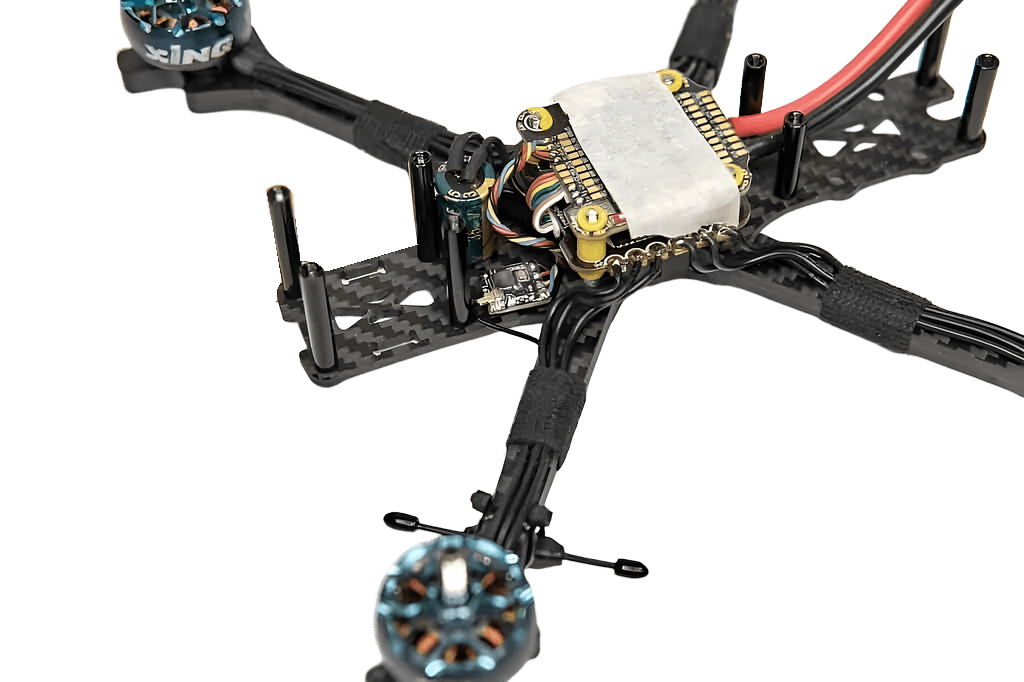
Наденьте платы регулировки оборотов ESC и пилотного контроллера FC на четыре длинных винта, следя за тем, чтобы силовые контакты платы ESC были обращены назад, а контакты припоя двигателя - вверх. На передней части рамы находятся вырезы для пластин крепления камеры.
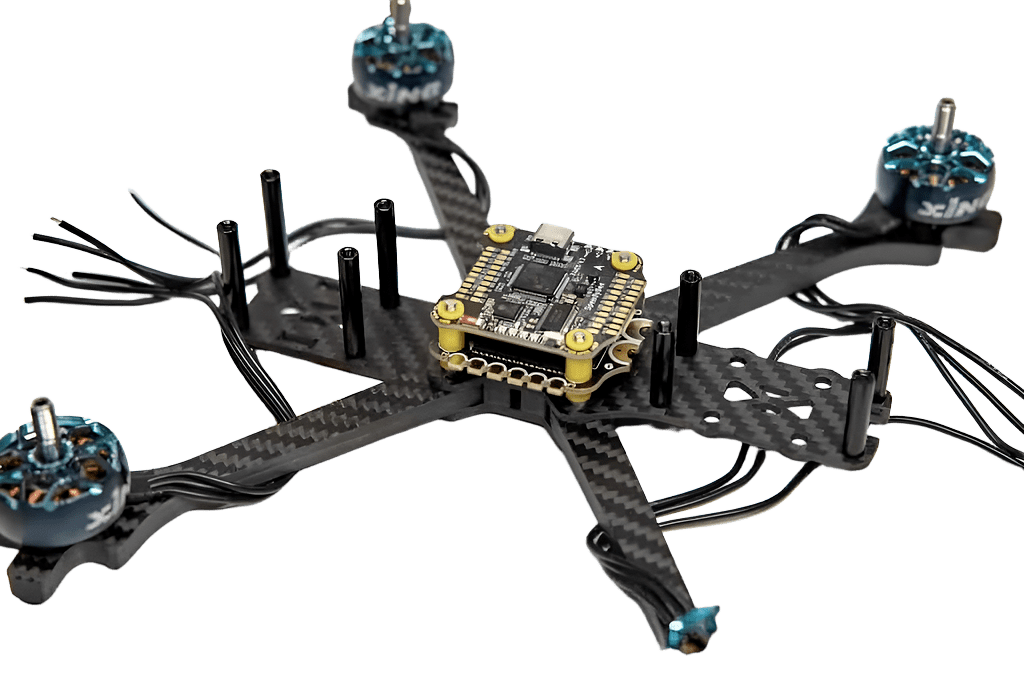
Осмотрите нижнюю часть ESC, чтобы убедиться, что она не касается рамы. Кроме того, проверьте, нет ли контакта между ESC и FC.
Далее вам предстоит пайка. Определите необходимую длину проводов двигателя, оставив небольшой запас, и отрежьте их соответственно. Закрепите провода двигателя на кронштейнах с помощью тканевой ленты или изоленты.
Некоторые пилоты любят использовать плетеные сетчатые трубки для крепления проводов двигателя в целях защиты / эстетики. На самом деле, они сложны в установке и не обеспечивают особой защиты или преимуществ.
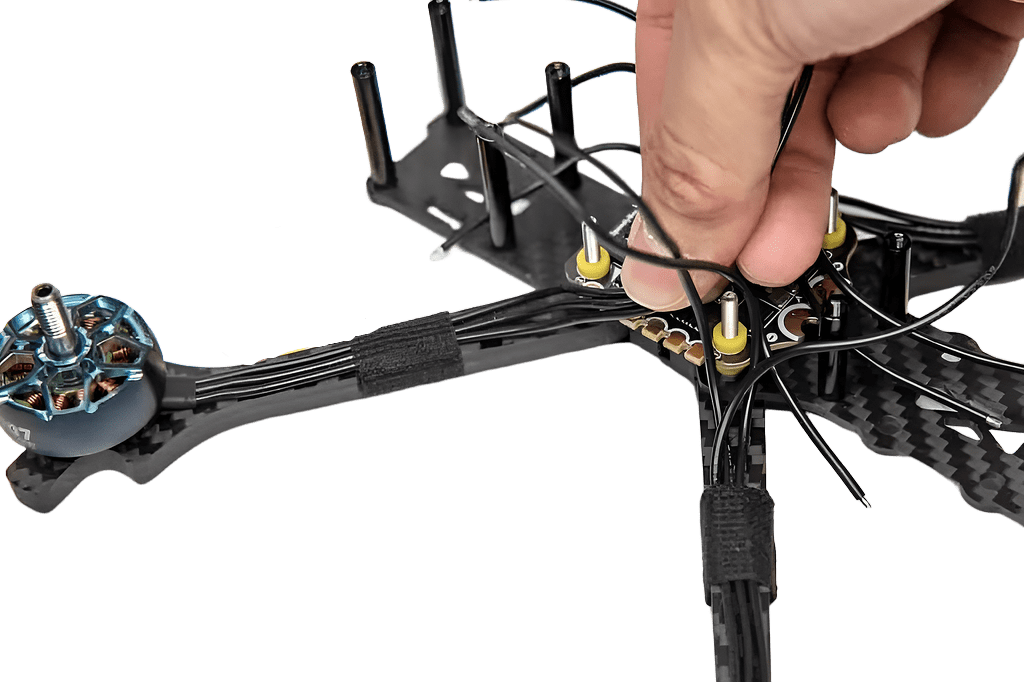
Затем отделите около 2 мм от кончиков проводов и залудите концы.
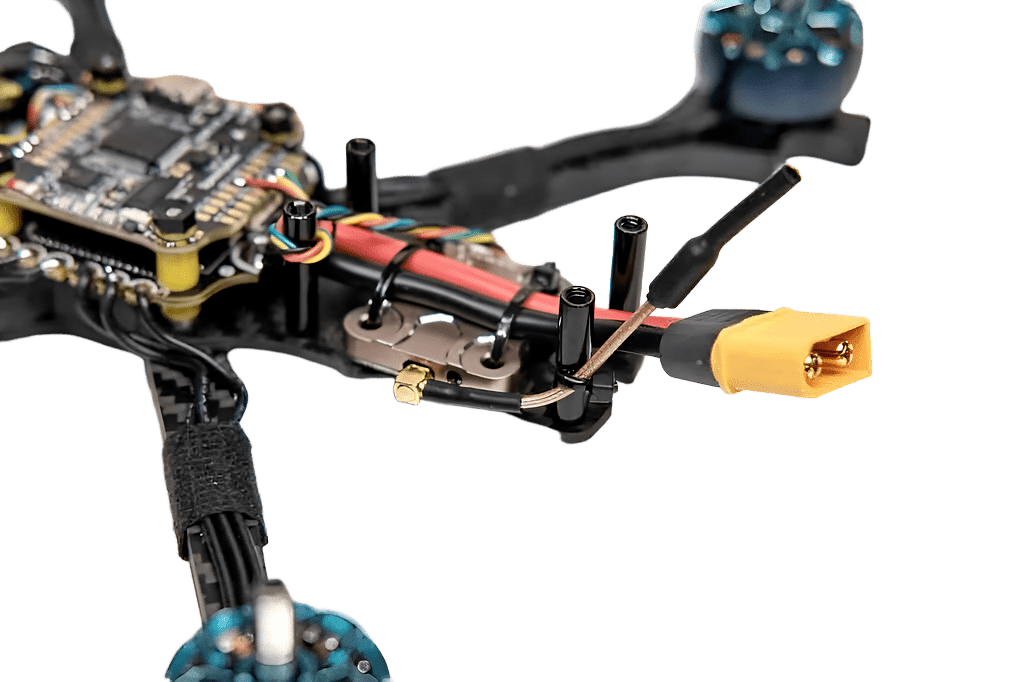
Припаяйте два кабеля к клеммам входного питания платы ESC (в идеале - с нижней стороны). К ним позже припаяем конденсатор. Пометьте положительный провод изолентой. Вы можете использовать также любые силиконовые электрические провода 20AWG или 22AWG.
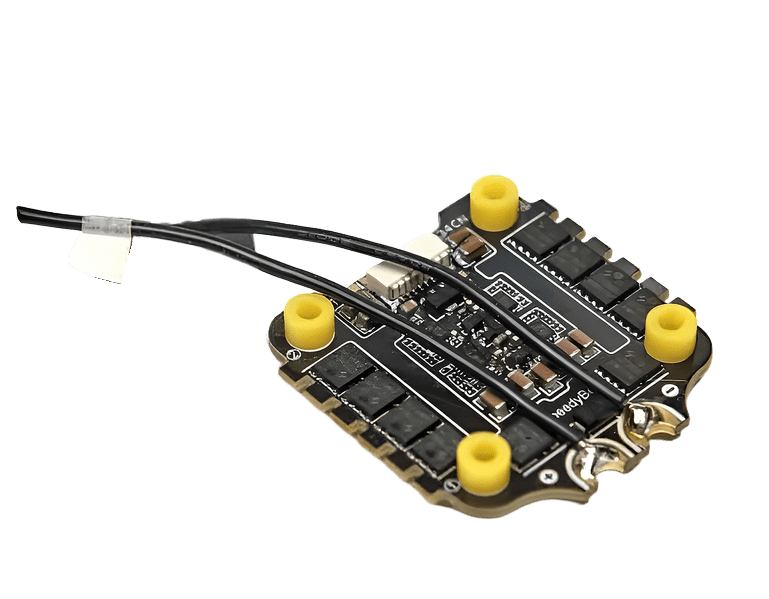
Обработайте луженым припоем все площадки на плате ESC. Чтобы припой случайно не попал на компоненты и не вызвал короткого замыкания, закройте участки платы, где пайка не производится, изолентой, например, электрической, каптоновой или малярной.
Припаяйте провода двигателя к ESC. Пока не беспокойтесь о порядке проводов и направлении мотора; вы сможете изменить это позже в программе. Если у вас есть навыки, вы можете попробовать припаять провода мотора боковой стороной, чтобы было удобнее держать квадрокоптер.
Припаяйте провода питания XT60 к колодкам питания на ESC, следя за соблюдением правильной полярности (положительной и отрицательной). Этот шаг может оказаться сложным из-за большого количества тепла, необходимого для расплавления припоя на больших медных площадках. Будьте терпеливы и используйте высокую температуру на паяльнике.
Советы по пайке:
- Используйте хорошее количество припоя и паяльного флюса (паяльной пасты) для больших площадок, следя за тем, чтобы паяные соединения были блестящими и полными. Если вы видите жилы кабеля, значит, вы нанесли не достаточно припоя.
- Eсли припой "прилипает" к наконечнику паяльника, когда вы вынимаете его из соединения - нанесите больше флюса, .
- Не стесняйтесь использовать высокую температуру при пайке больших площадок, но действуйте быстро и не перегревайте площадки слишком долго. Для проводов двигателя и XT60 используйте температуру 450°C (840°F), а для сигнальных проводов - 380°C.
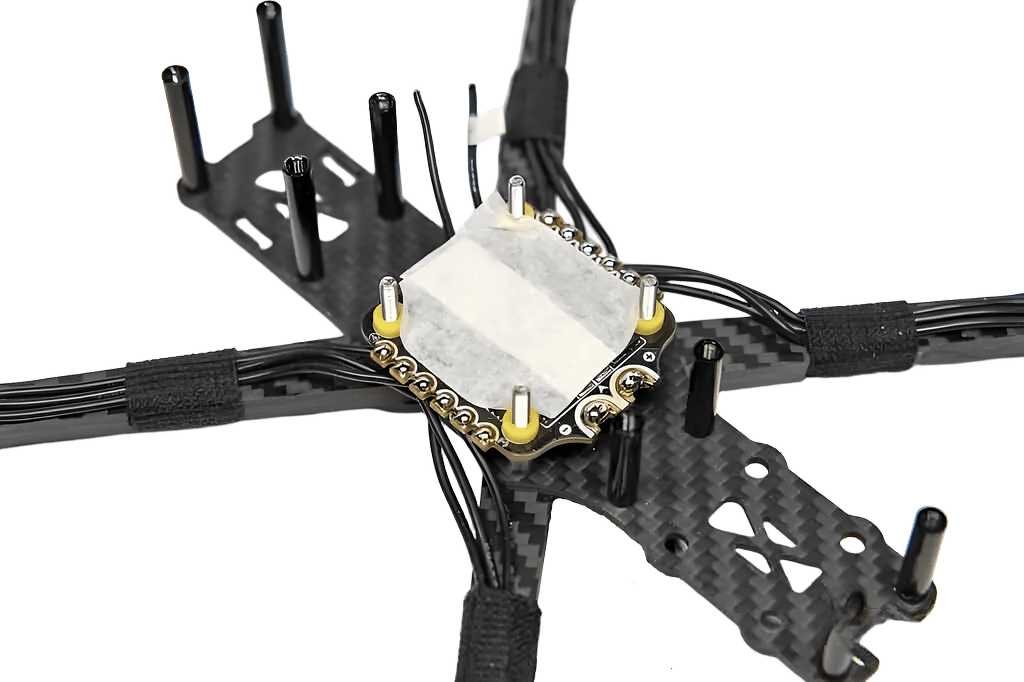
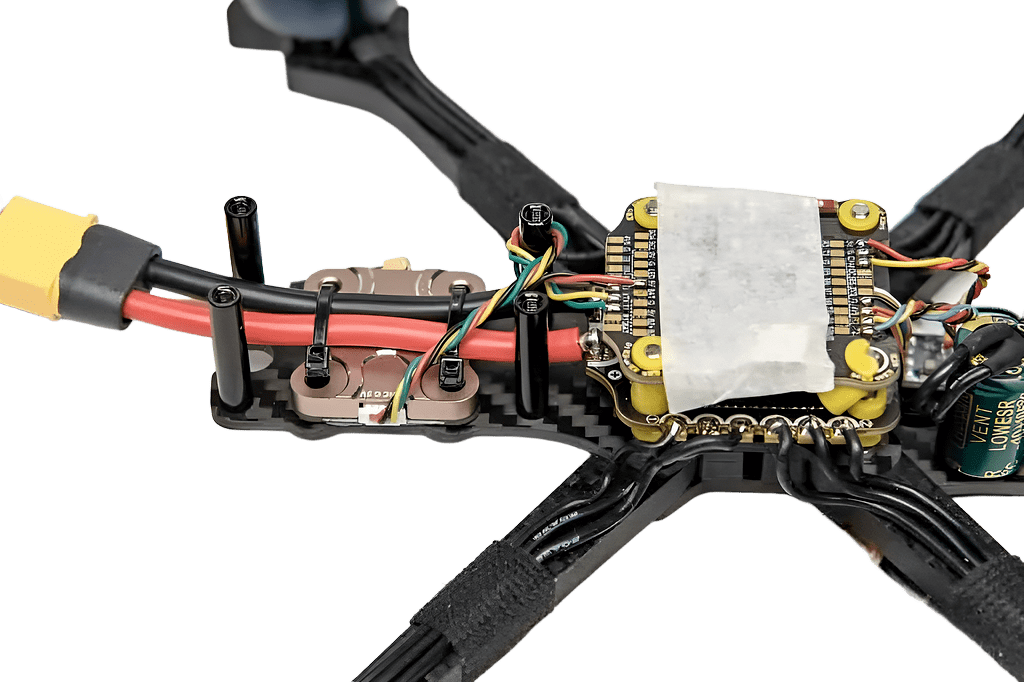
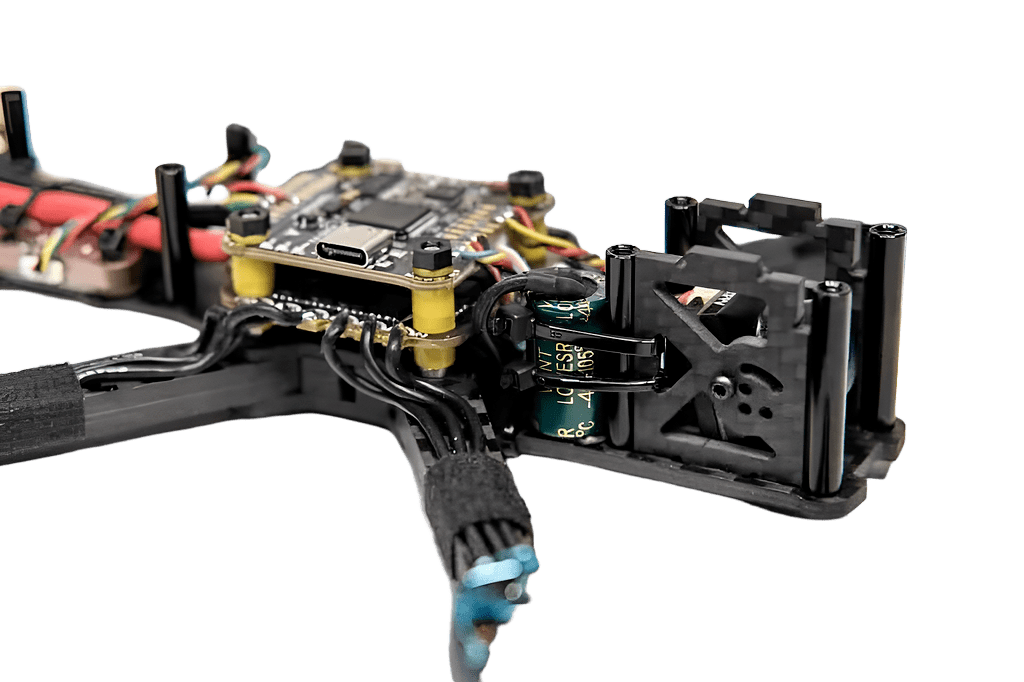
Теперь припаяйте конденсатор емкостью 1500 мкФ, который поставляется в комплекте со стеком Speedybee. Согните и укоротите ножки с помощью плоскогубцев, а затем припаяйте их.

Приклейте небольшой кусочек двустороннего скотча к нижней части конденсатора.
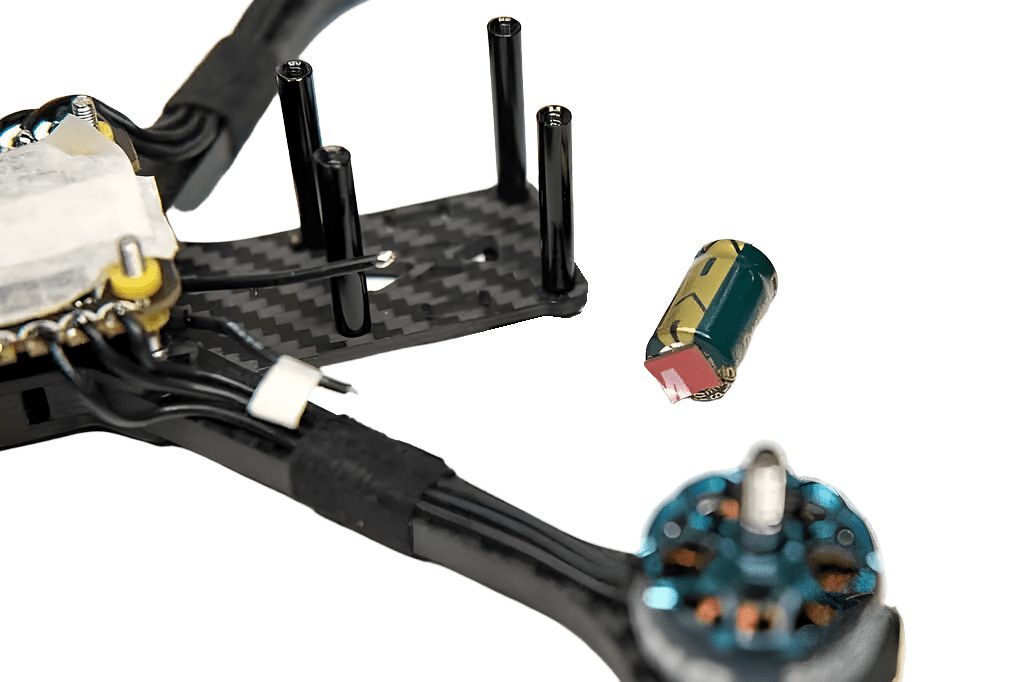
Припаяйте конденсатор к проводам, подключенным ранее к колодкам питания ESC, не забывая о полярности. Сторона с желтой маркировкой - это минус конденсатора.
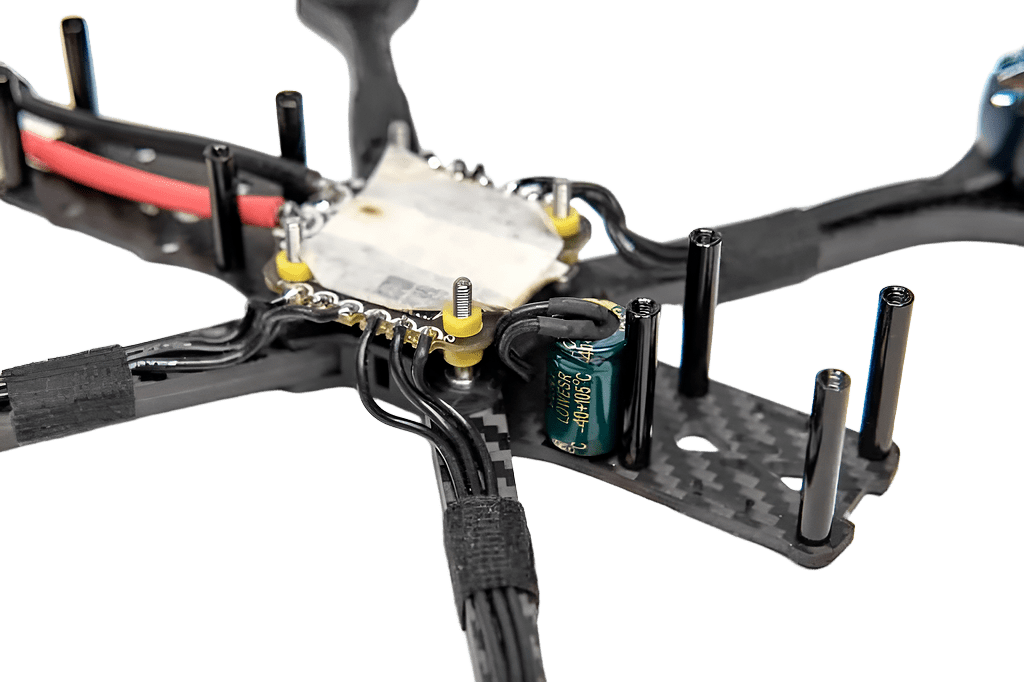
Конденсатор используется для уменьшения скачков напряжения и электрического шума, создаваемого ESC и двигателями.
↑ К оглавлению
5. Проверка ESC и двигателей
Перед первым подключением LiPo аккумулятора убедитесь в отсутствии короткого замыкания. Используя мультиметр в режиме проверки целостности цепи, проверьте положительный и отрицательный выводы XT60 (или непосредственно на паяльных площадках). При наличии короткого замыкания мультиметр будет издавать непрерывный звуковой сигнал. В этом случае не подключайте батарею, так как это может привести к повреждению компонентов. Вместо этого найдите и устраните неисправность, вызвавшую короткое замыкание.
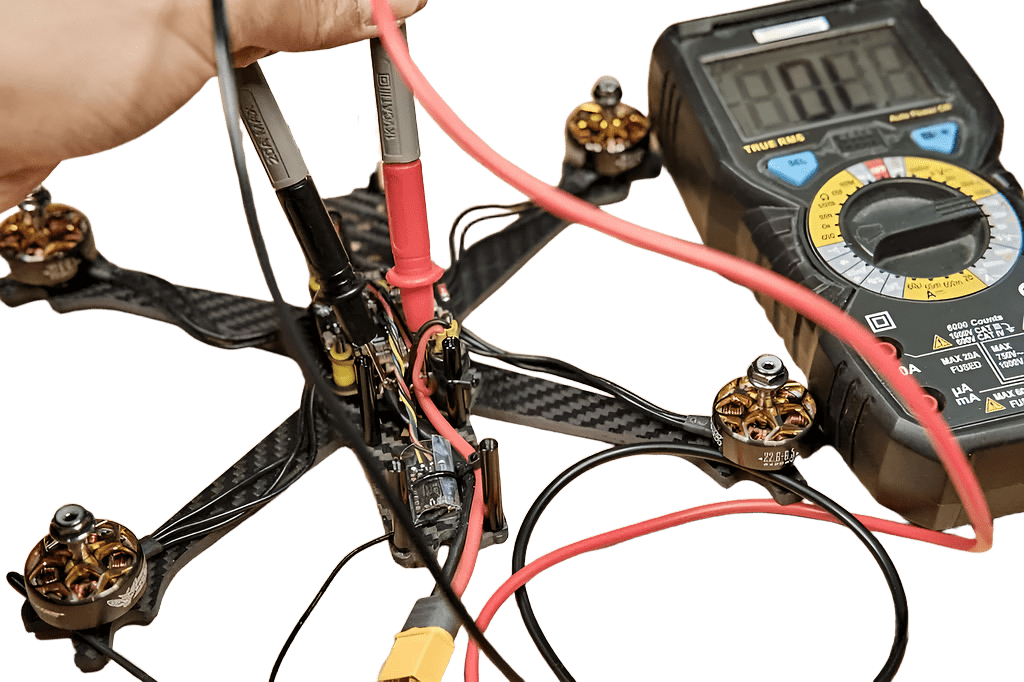
Совет: При тестировании целостности цепи может быть кратковременный звуковой сигнал, который затем прекращается — это нормально и не должно вызывать беспокойства. Главное, чтобы звук прекратился через секунду или две.
Используйте дымовый стопор при первом подключении батареи. Хотя это не обязательно, но это хорошее вложение, чтобы избежать повреждения компонодов.
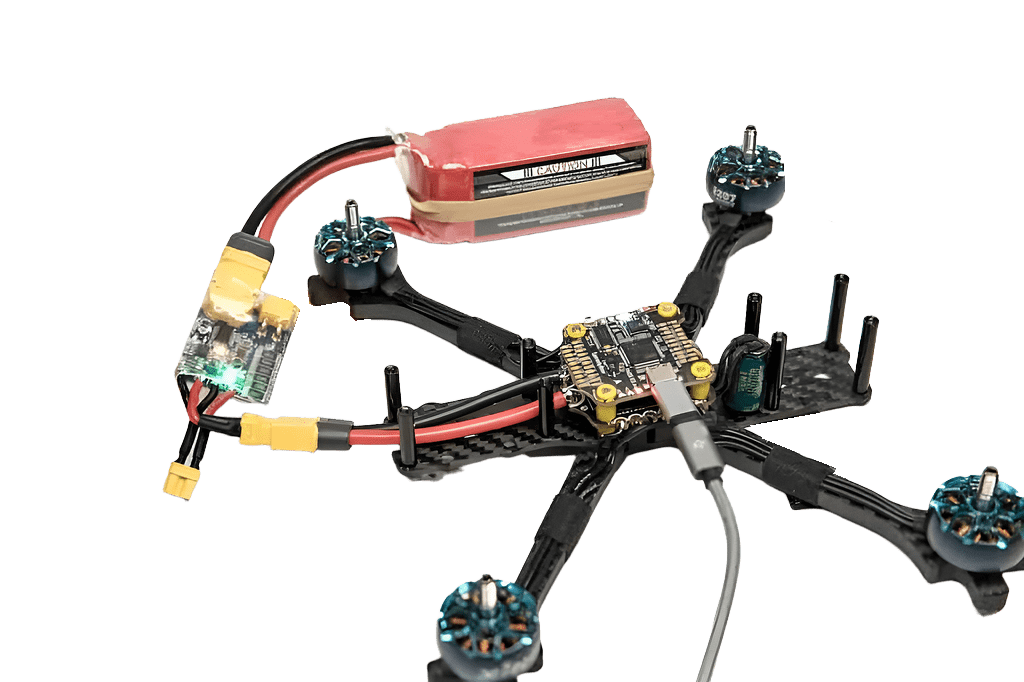
Пока не устанавливайте пропеллеры. Чтобы протестировать двигатели, подключите аккумулятор и USB-кабель к полётному контроллеру. В разделе «Моторы» программы Betaflight Configurator запустите двигатели по одному (переместите ползунок примерно до 10%) и проверьте, вращаются ли они в правильном направлении.
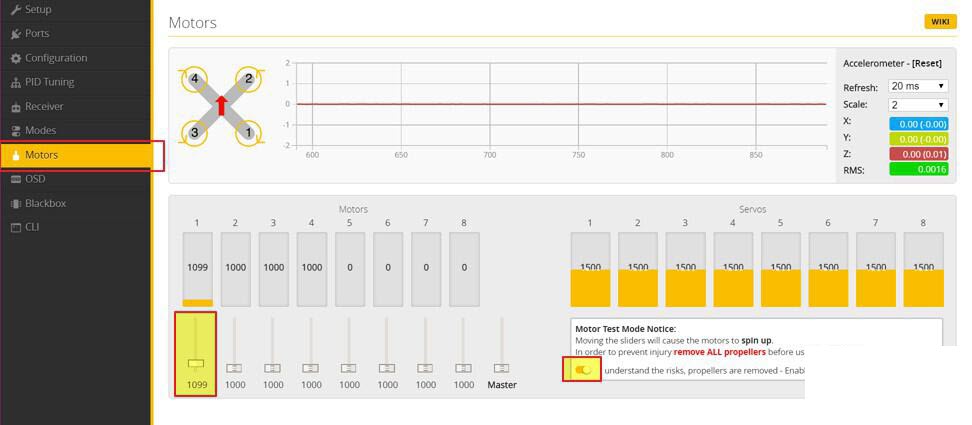
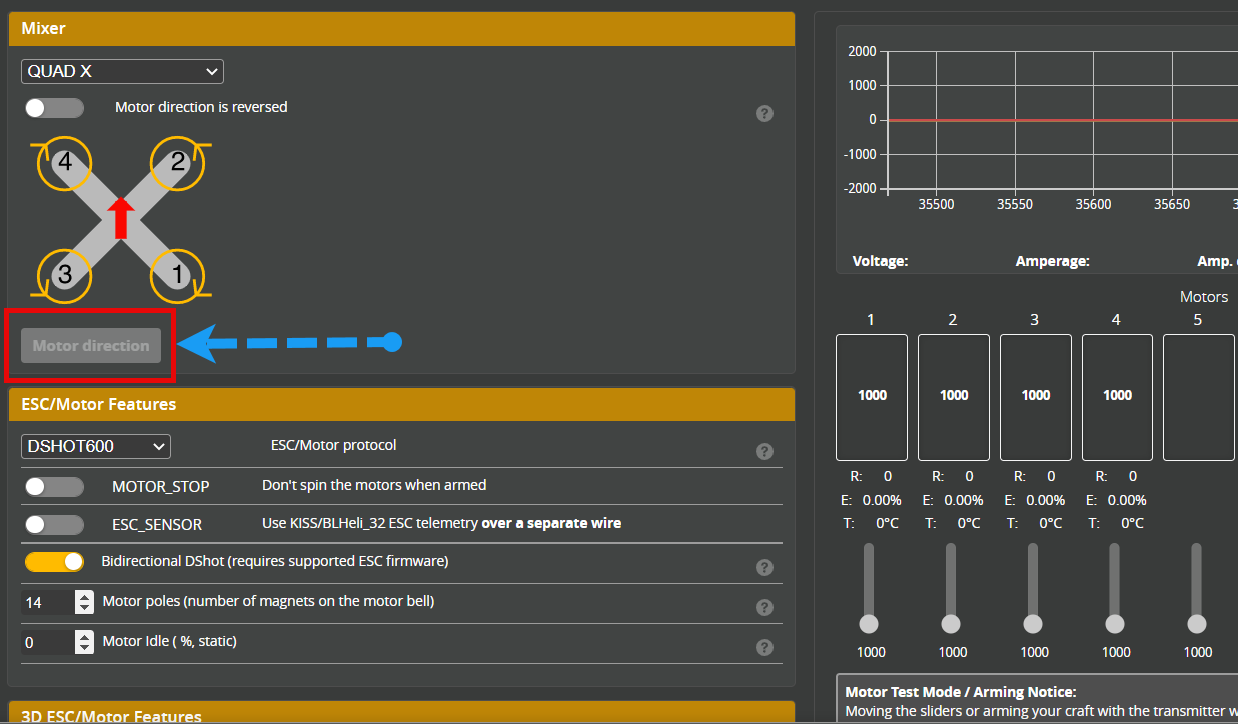
Чтобы изменить направление вращения двигателя, используйте Betaflight Configurator (вкладка Motors) кнопка Motor Direction / Направление мотора.
Советы по устранению неполадок:
- Если двигатели не вращаются, убедитесь, что батарея подключена. Как только вы подключите батарею, ESC должен подать звуковой сигнал. Убедитесь, что ESC подключен к FC, и что контактные соединения правильные.
- Если вращаются все моторы, кроме одного, возможно, неисправен конкретный ESC, мотор или не проходит сигнал к ESC от полетного контроллера. Чтобы устранить неполадки и диагностировать проблему быстро, поменяйте неработающий мотор на заведомо исправный на том же квадрокоптере.
6. Настройка приёмника
Для пайки RX к FC потребуются купить провода 28AWG или 30AWG, так как RP1 не поставляется с ними.

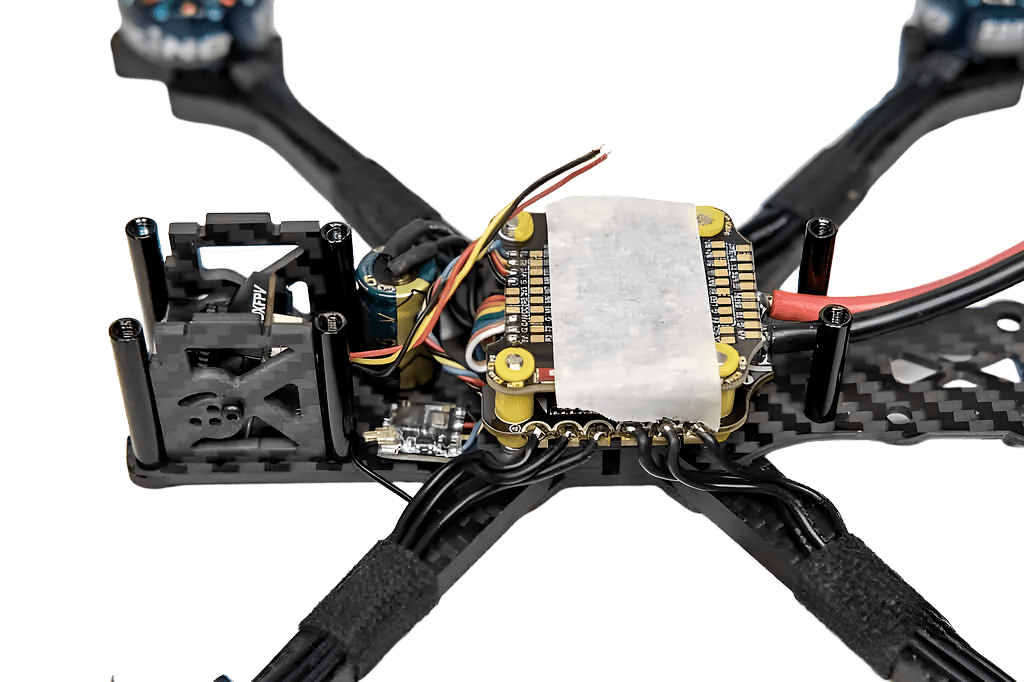
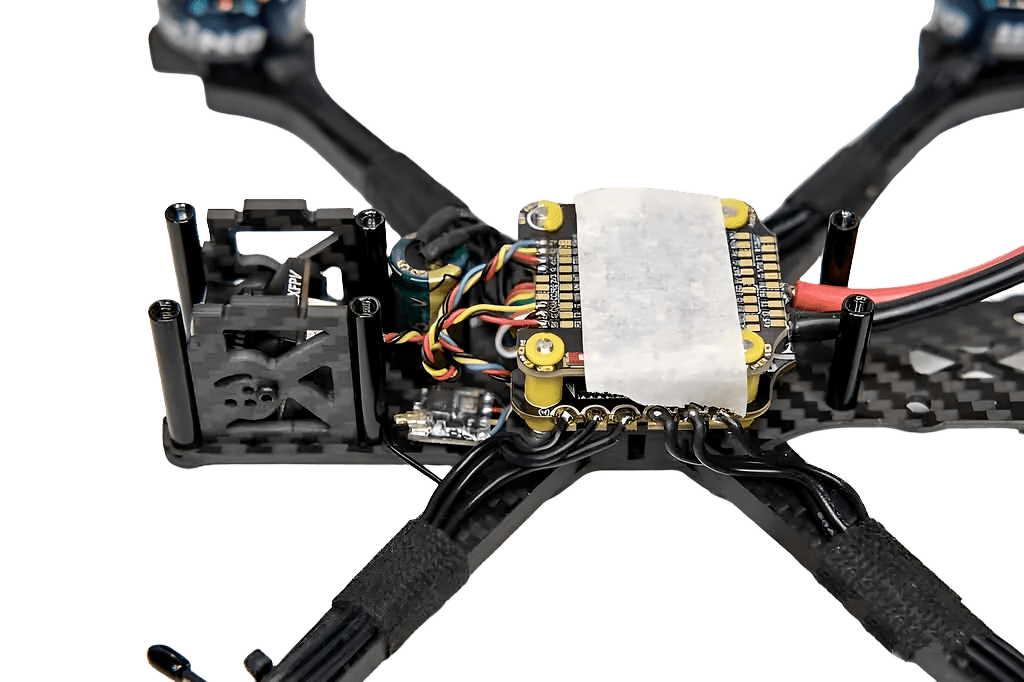
Закрепите RX перед FC с помощью двухсторонней вспененной ленты или стяжки. Вы можете установить его в любом месте, где достаточно места в раме.
Лучше всего оставить верх FC без проводов, чтобы избежать вибраций рядом с гироскопом во время полёта.
Закрепите антенну RX под ближайшим лучем с помощью стяжек и обмотайте провод антенны изолентой.

"Привяжите" приемник к аппаратуре управления (бинд), следуя руководству по настройке ExpressLRS.
В конфигураторе Betaflight примените эти настройки:
- Перейдите на вкладку "Порты" и включите "Serial RX" для UART, подключенного к приемнику (в нашем примере UART2).
- На вкладке Receiver выберите "Serial (via UART) / Серийный порт (через UART)" в Receiver Mode и выберите "CRSF" в Serial Receiver Provider.
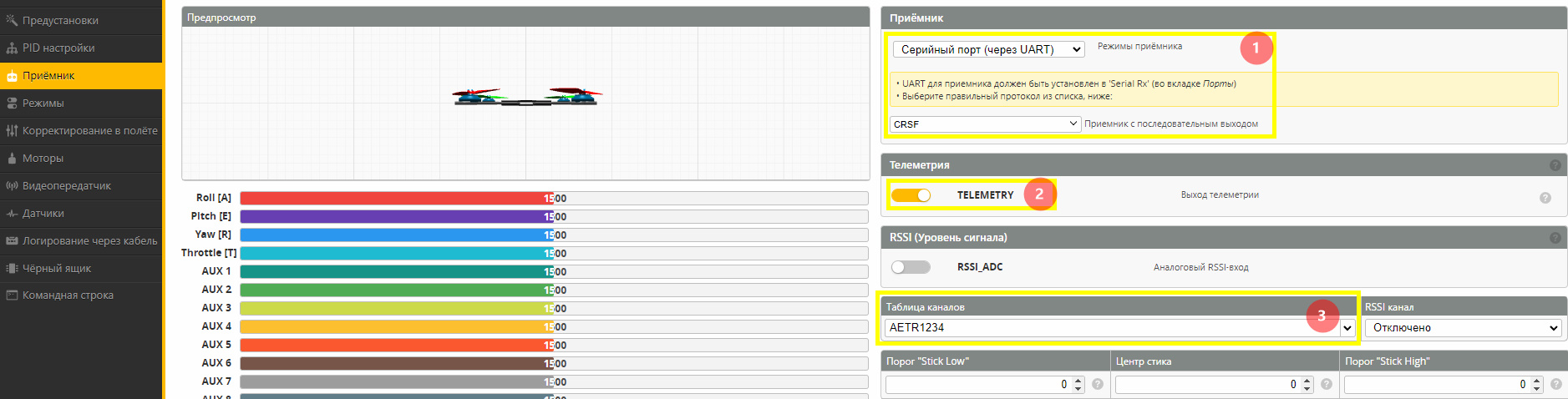
После этого убедитесь, что приёмник работает правильно в разделе "Receiver / Приемник". Индикаторы (каналы) должны двигаться при перемещении джойстиков на пульте управления. Если реагируют неправильно, попробуйте другую карту каналов, например, "default (AETR)" или "TAER".
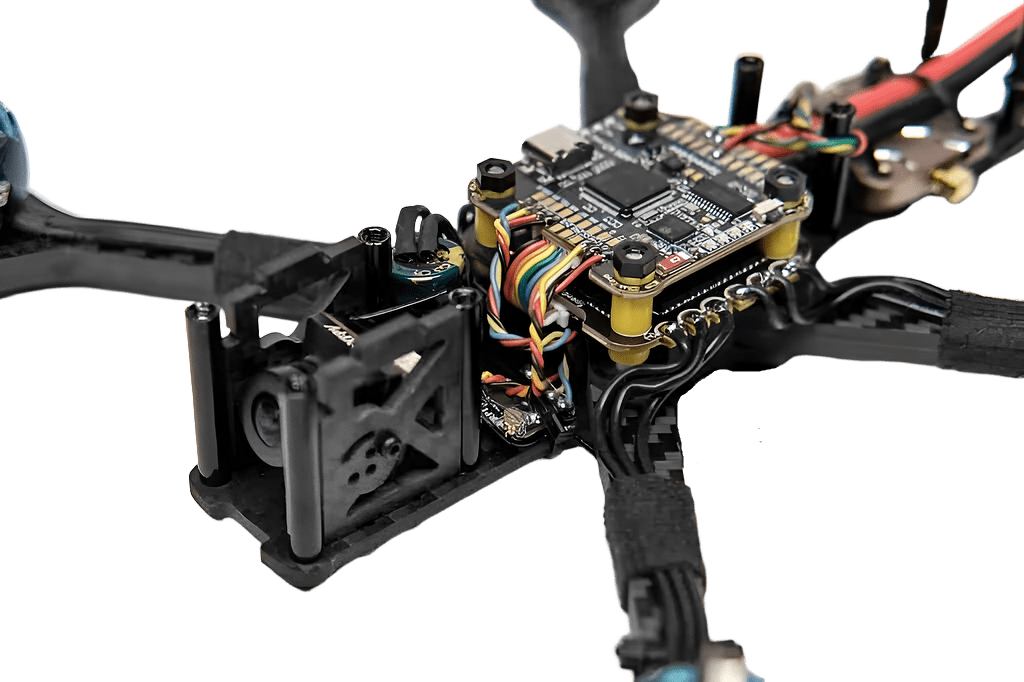
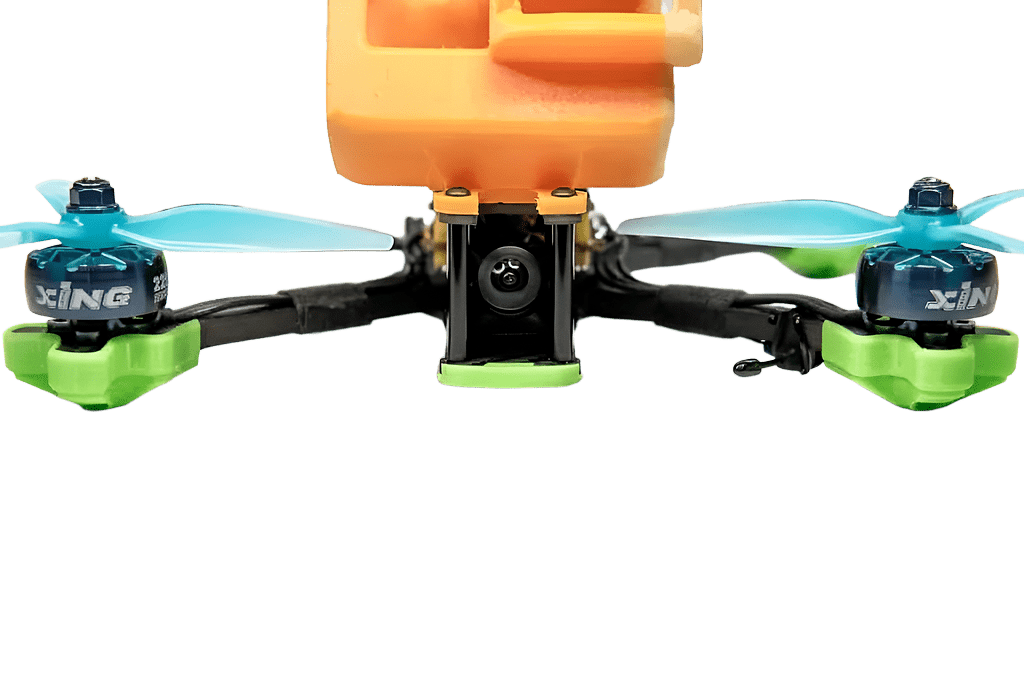
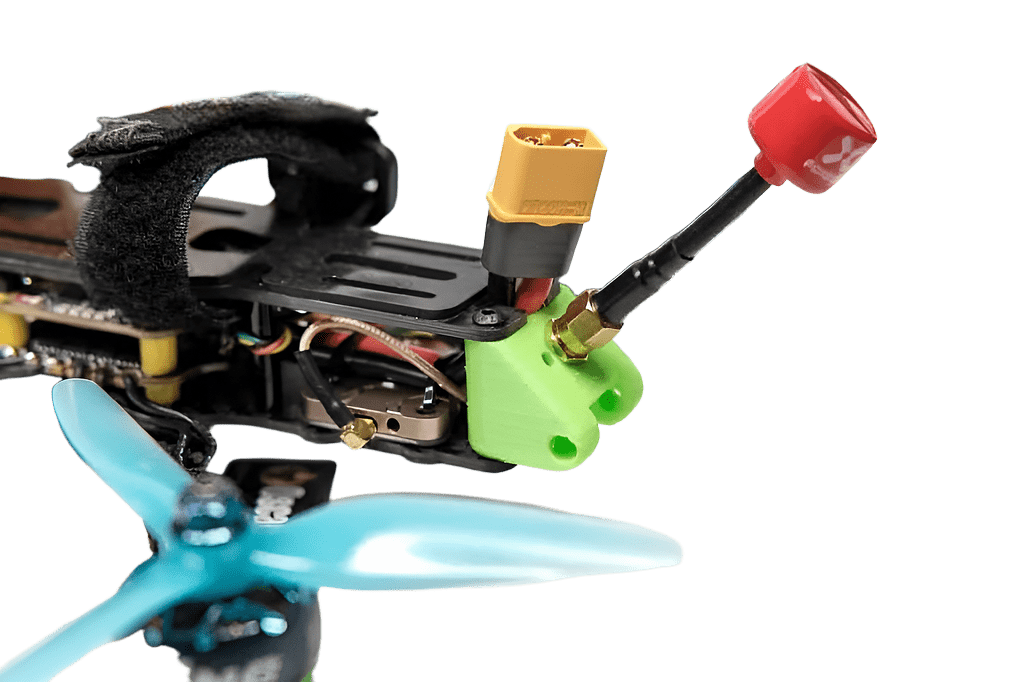
↑ К оглавлению7. Установка аналоговой FPV-системы
Установите камеру между боковыми пластинами. Разместите камеру внутри рамы и обрежьте провода камеры по длине. Скрутите провода, чтобы они были плотными.
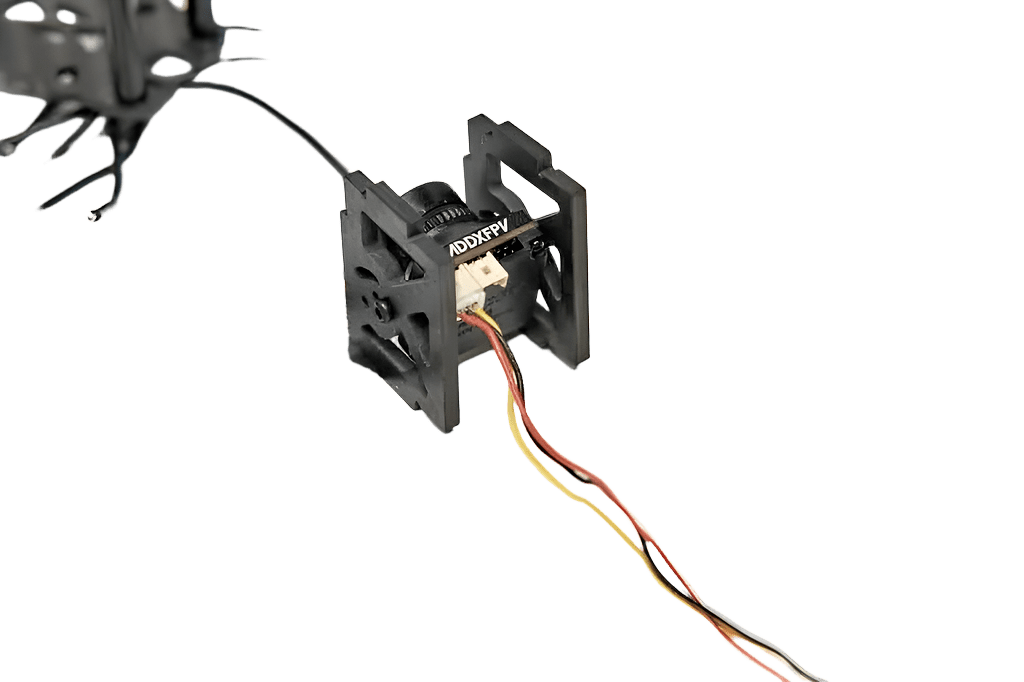
Поместите камеру в рамку и отрежьте провода камеры по длине. Скрутите провода, чтобы они были плотными.
Припаяйте провода камеры к FC: красный провод к 5V, чёрный к GND и жёлтый к CAM.
Для установки VTX можно использовать двустороннюю ленту и стяжные хомуты вместо стоек. Это проще, надёжнее и легче, если вам не важен внешний вид, а только производительность.
Припаяйте кабель VTX к FC и убедитесь, что он не болтается.
Закрепите антенну VTX на стойке.
↑ К оглавлению
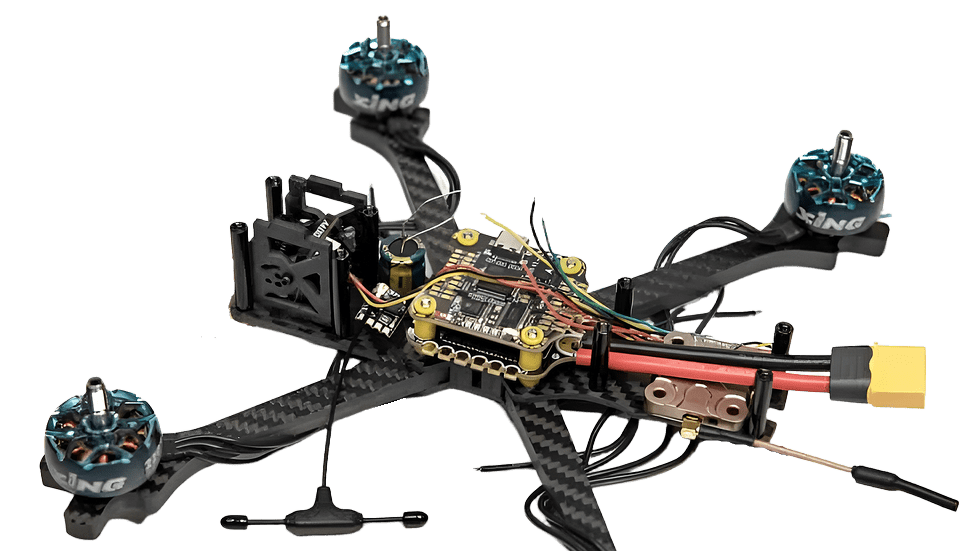
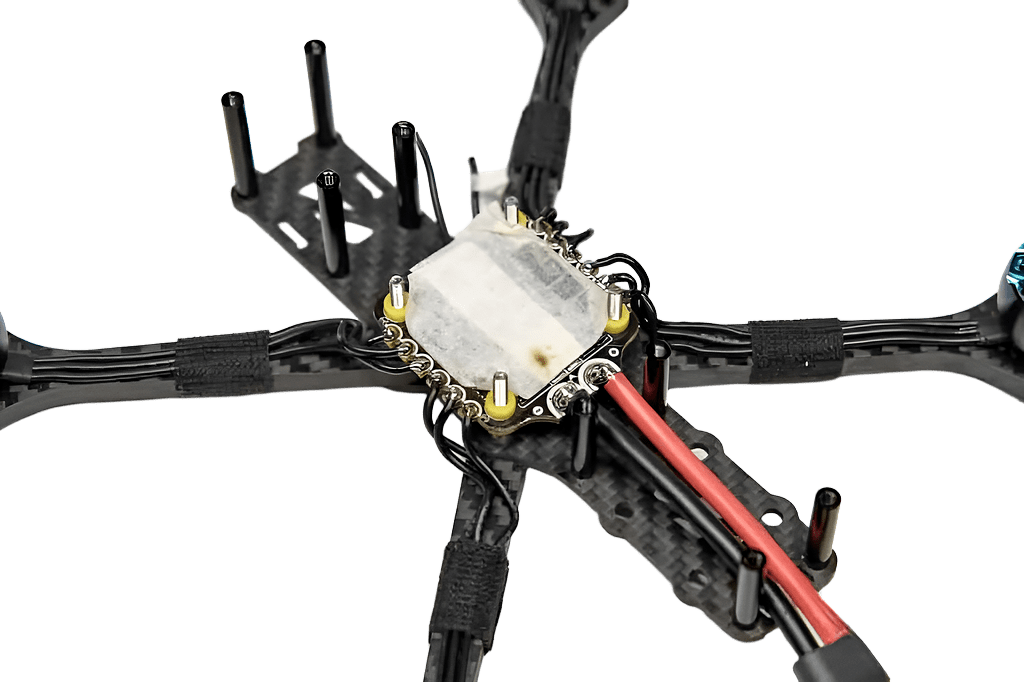
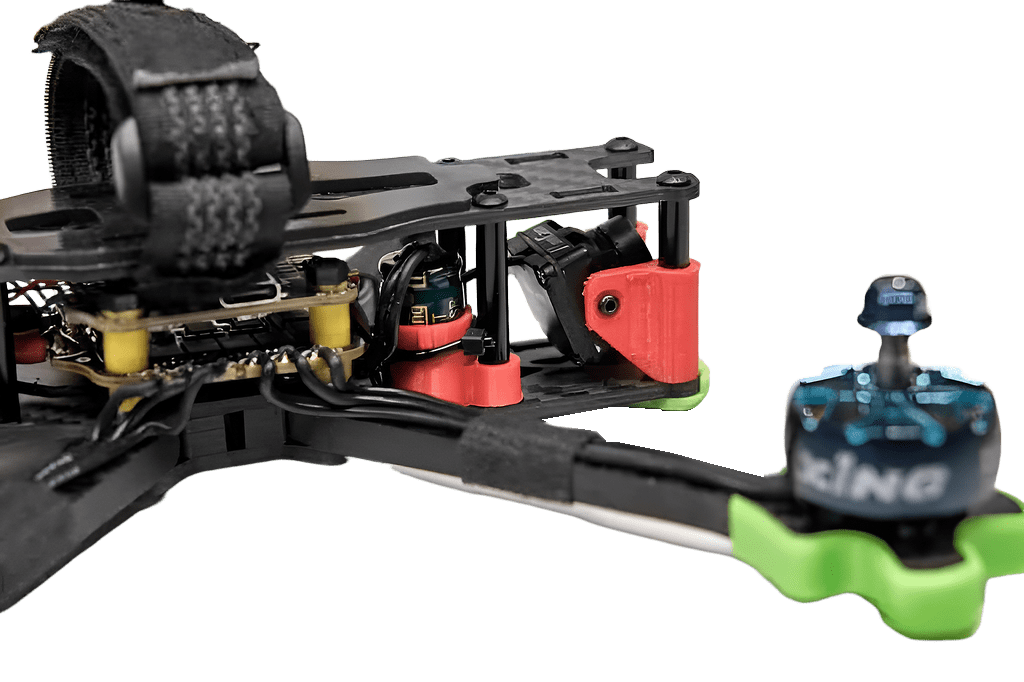
8. Завершение сборки
Чтобы завершить сборку дрона, выполните следующие действия.
Закрепите FC нейлоновыми гайками, закрепите их руками, чтобы не перетянуть, они должны только касаться резиновой втулки. Сжатые втулки уменьшают демпфирование вибраций.
Прикрепите конденсатор к пластинам камеры с помощью стяжки.
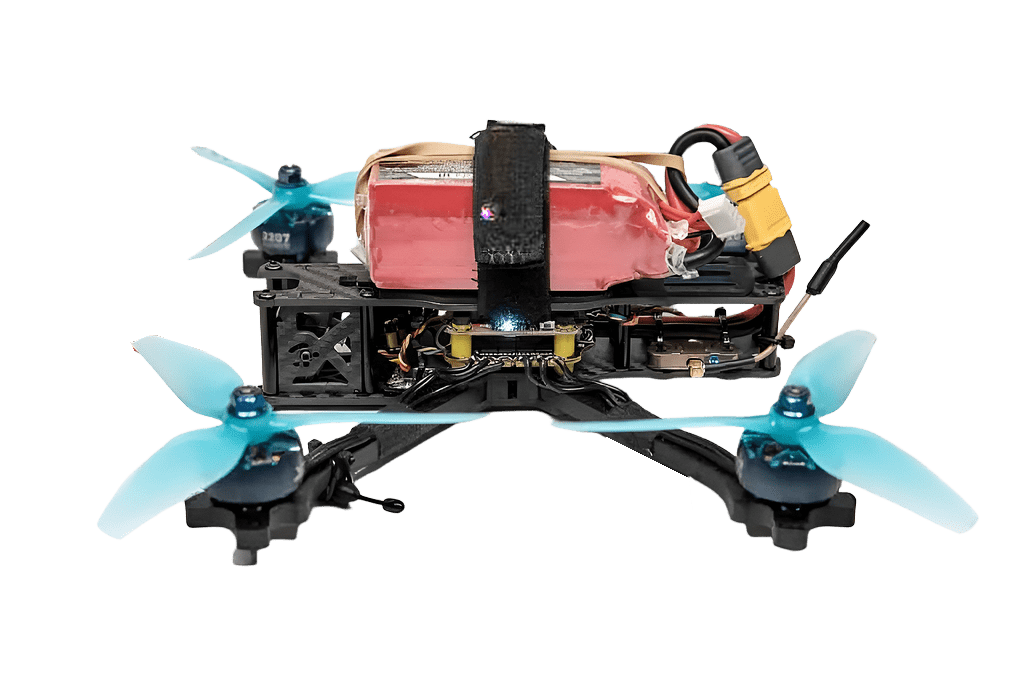
Установите верхнюю панель и проденьте ремешок для аккумулятора под ней и через нее. Source One V5 поставляется с прорезиненной площадкой для аккумулятора, которая хорошо работает, но если вы предпочитаете более качественный вариант, обратите внимание на площадку для аккумулятора Ummagrip. Она липкая, ее можно мыть, а ее толщина надежно удерживает батарею вдали от болтов.

Веса готовой сборки следующие:
- Дрон: 360 г
- Дрон + 6S 1100 мАч LiPo: 560 г
- Дрон + 6S 1100 мАч LiPo + GoPro 7: 680 г
Для 5-дюймового устройства он действительно очень легкий, что обеспечивает отличные летные характеристики. Как правило, вес 5 дюймов, включая аккумулятор и Go Pro, не должен превышать 750 г, иначе он будет летать как танк и не очень хорошо чувствовать себя во фристайле.
При установке пропеллеров обратите внимание на правильное вращение винтов - по часовой стрелке и против часовой стрелки соседние винты. Убедитесь, что они установлены на правильные двигатели, иначе ваш квадрокоптер может не взлететь или перевернуться при попытке взлететь.
Используйте нейлоновые контргайки M5, чтобы надежно зафиксировать пропеллеры на моторе. Поначалу затяжка может быть тугой, но со временем она станет легче. Избегайте чрезмерной затяжки, чтобы не разбить ступицу пропеллера. Затяните достаточно, чтобы пропеллер не двигался, когда вы пытаетесь повернуть его рукой, держась за колокол мотора.

При установке батареи (и GoPro) убедитесь, что COG (центр тяжести) находится как можно ближе к центру дрона. Чтобы проверить, правильно ли размещена батарея, возьмитесь двумя пальцами за середину верхней пластины и посмотрите, остается ли квадрокоптер в горизонтальном положении.
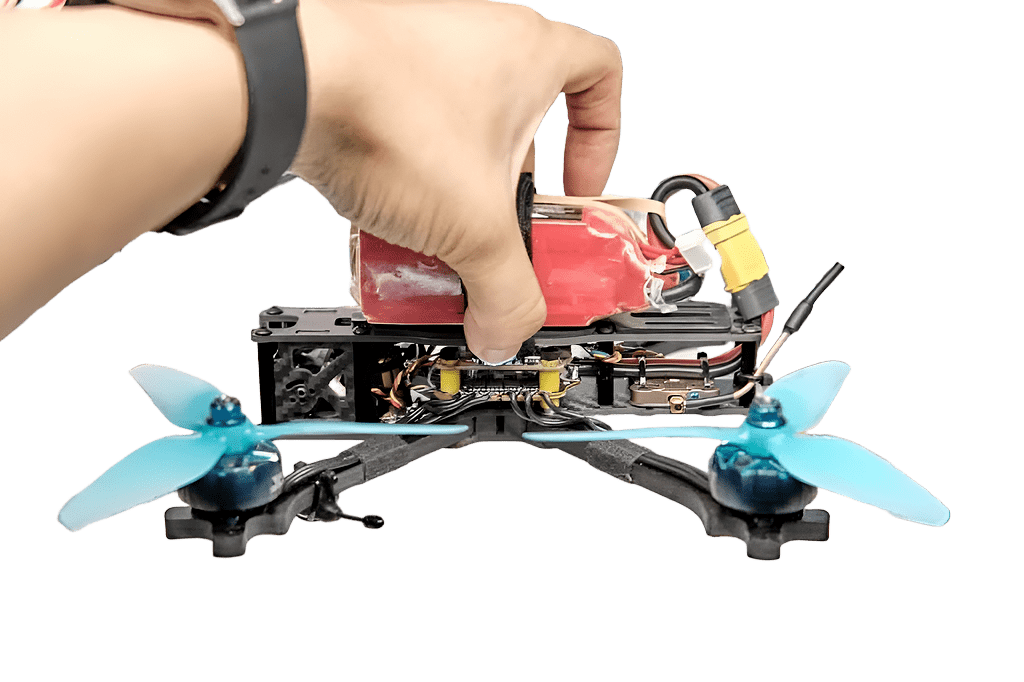
Все готово к испытательному полету!
↑ К оглавлению
9. Использование 3D-печатных деталей
Для более чистой, аккуратной и прочной сборки рассмотрите возможность использования 3D-печатных деталей. Вы можете найти различные конструкции онлайн, выполнив поиск "Source One V5" на Thingiverse.com.
Вот несколько хороших, которые я нашел:
- Разработки для V4, но некоторые детали подойдут и для V5: https://www.thingiverse.com/thing
- Защита лучей и бампер: https://www.thingiverse.com/thing
- Крепление GoPro 5-7: https://www.thingiverse.com/thing

Одной из самых необходимых 3D дополнений, которую я рекомендую, является 3D защита для лучей дрона. Это не просто декоративные элементы, они играют важную роль в сохранении целостности углепластиковых конструкций лучей. Прелесть 3D-печатных протекторов заключается в их способности поглощать и распределять удар, значительно снижая риск повреждения.
↑ К оглавлению
10. Настройка Betaflight
Для настройки Betaflight перед первым полётом следуйте инструкциям в этом руководстве: "Как настроить Betaflight"
↑ К оглавлению11. Настройка квадрокоптера
Настройка квадрокоптера заключается в том, чтобы настроить его, чтобы он летал и вел себя так, как вы хотите. Betaflight проделал долгий путь; вам не придется настраивать свой квадрокоптер, и он, скорее всего, будет отлично летать со стоковыми настройками. Однако если вы серьезно относитесь к производительности, то вам есть чему поучиться!
Для большинства пилотов настройка мини-квадрокоптера будет заключаться в регулировке этих параметров:
- Фильтры
- PID и связанные с ними настройки
- Рейты и Expo
Ниже приведена настройка PID и фильтра для этой сборки, но она может не подойти конкретно вам, или если вы используете другие компоненты. Это агрессивная настройка, поэтому перед ее использованием проведите короткий тестовый полет и проверьте температуру двигателя.

Параметры на фристайл:
- Center Sensitivity 180
- Max Rate 750
- Expo 0.56
12. Обучение полётам
Если у вас мало или совсем нет опыта управления мини-квадрокоптером, рассмотрите возможность изучения следующих материалов:
- Практика с FPV-симуляторами
- Советы и упражнения для освоения FPV-полётов [Статья не готова]
- Испытываете трудности с FPV-полётами? Вот несколько советов [Статья не готова]
Улучшения и модернизация
После того как вы освоите основы сборки и полётов на своём FPV-дроне, вы можете рассмотреть возможность некоторых улучшений и модернизации, чтобы повысить его производительность. Ниже приведён список возможных улучшений и модернизаций, которые вы можете выполнить:
- Прошейте прошивку Bluejay в ESC: Вам нужно выбрать между версиями 24 кГц или 48 кГц. Версия 24 кГц обеспечивает лучшую отзывчивость и крутящий момент, тогда как версия 48 кГц предлагает более плавный полёт с немного меньшим крутящим моментом. В Betaflight включите двунаправленный Dshot, который позволяет включить фильтр RPM, один из лучших доступных фильтров.
- Используйте 3D-печатные детали: Если вы этого ещё не сделали, рассмотрите возможность использования 3D-печатных деталей для повышения прочности и удобства использования.
- Если у вас аналоговая сборка, рассмотрите возможность обновления антенны VTX до круговой поляризованной антенны. Антенна дипольного типа, которая идёт в комплекте с TX800, нормальная, но не самая лучшая.
- Точно настройте PID и фильтр.
- Измените направление вращения двигателя (пропеллеры наружу), чтобы реже застревать в ветвях, а также сохранять объектив камеры чистым от грязи и пыли.
Эти улучшения и модернизации помогут вам максимально эффективно использовать свой FPV-дрон и улучшить общий опыт полётов. Помните, что по мере роста ваших навыков и знаний в мире FPV-дронов всегда есть новые техники и технологии, которые можно изучить.
↑ К оглавлению
ID 17781