

")
Как собрать FPV-дрон (с DJI O4 Pro Air Unit)

В этом подробном руководстве вы найдете пошаговые инструкции по сборке FPV-дрона с нуля — как для аналоговых, так и для цифровых систем FPV. Мы рассмотрим выбор компонентов, подключение проводов, тестирование и настройку, а также дадим советы, которые помогут вашему дрону работать надежно и приносить удовольствие.
- Могут ли новички собирать FPV-дроны?
- Основы
- Список деталей
- Другое оборудование
- Инструменты и материалы
- Этапы сборки FPV-дрона
можно ли собрать FPV-дрон без опыта?
Даже если у вас нет никакого опыта, вы сможете собрать FPV-дрон без особых проблем.
Собирая дрон самостоятельно, вы получите ценное практическое знание каждого компонента и того, как они работают вместе. Вы также будете лучше подготовлены к диагностике и ремонту дрона, если что-то пойдет не так.
Основы
Прежде чем приступить к этому руководству, важно освоить основы квадрокоптера.
Чтобы начать, ознакомьтесь с руководством для новичков: Начало работы с FPV-дроном. Также рекомендуется использовать справочник терминов: Расшифровка аббревиатур и технических терминов в FPV.
Список деталей
В этом руководстве мы будем использовать следующие детали, чтобы помочь вам в процессе сборки FPV-дрона.
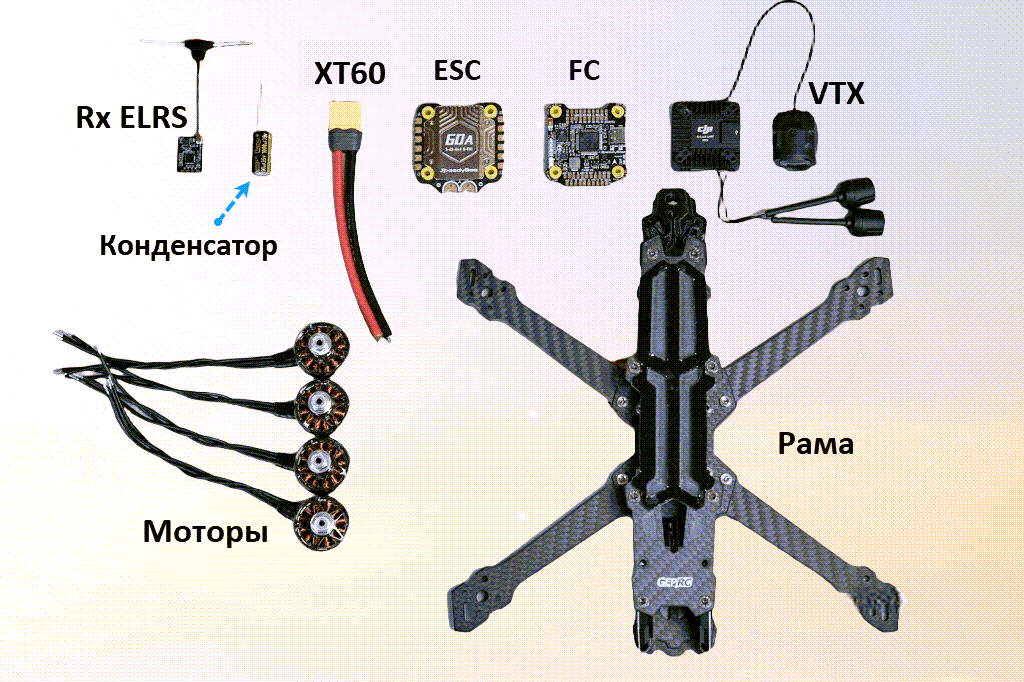
DJI O4 Pro Build |
|
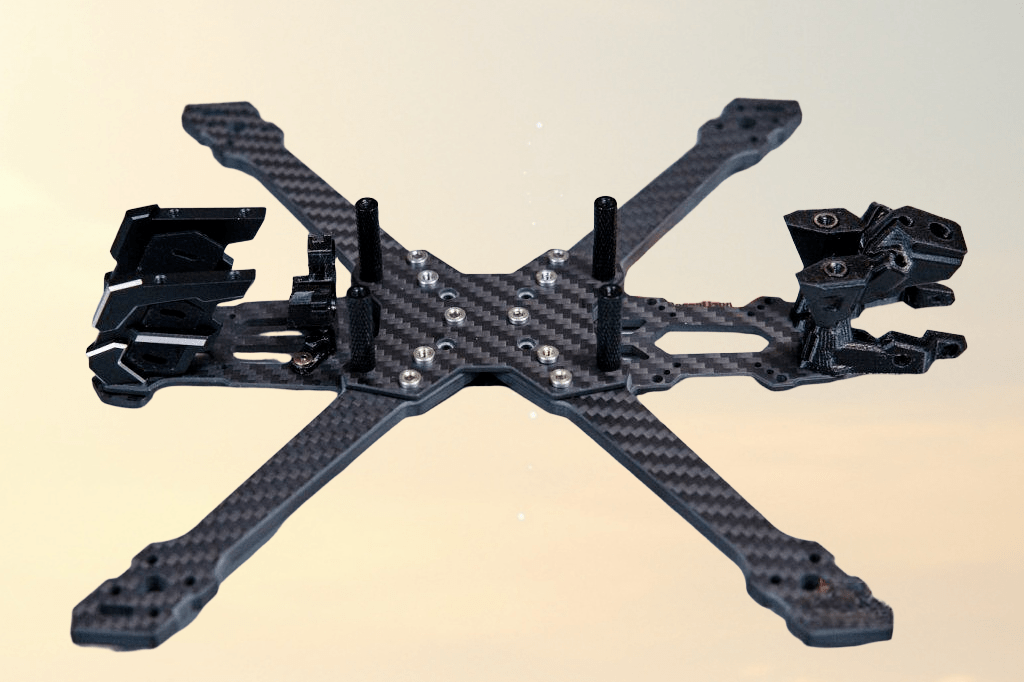
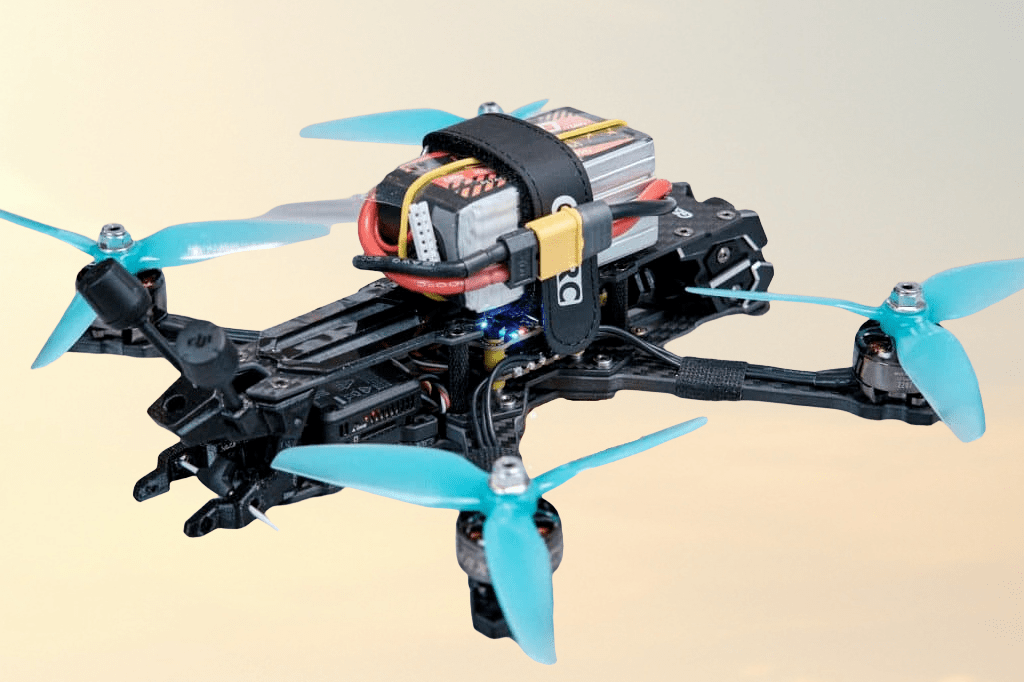
| Frame (Рама) | GEPRC Vapor |
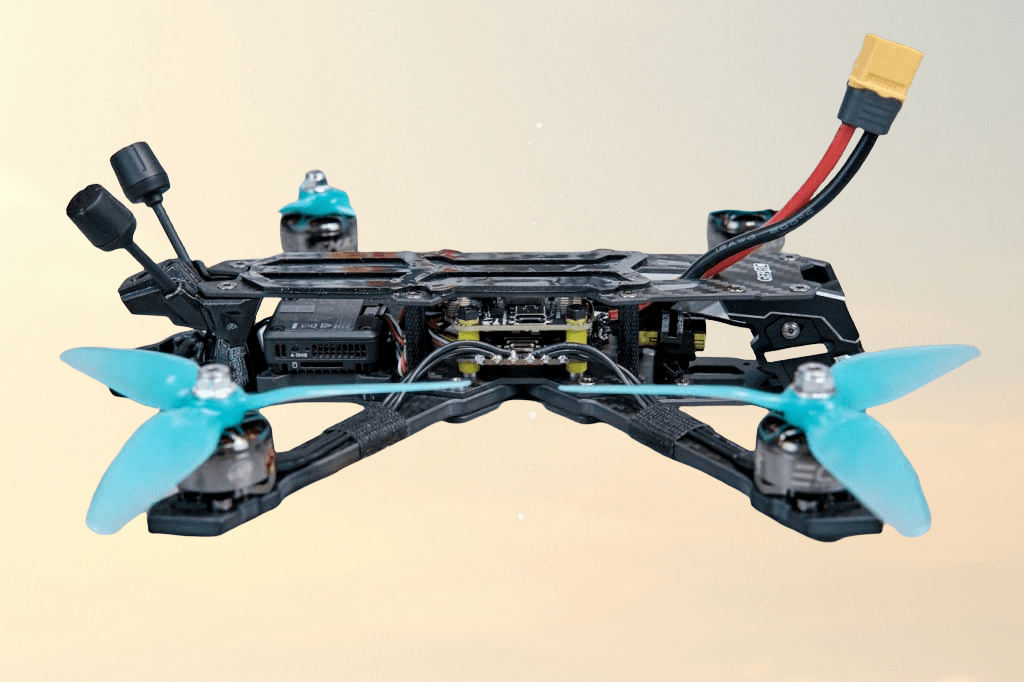
| FC / ESC (пилотный контроллер +ESC) | Speedybee F405 V4 + 60A ESC |
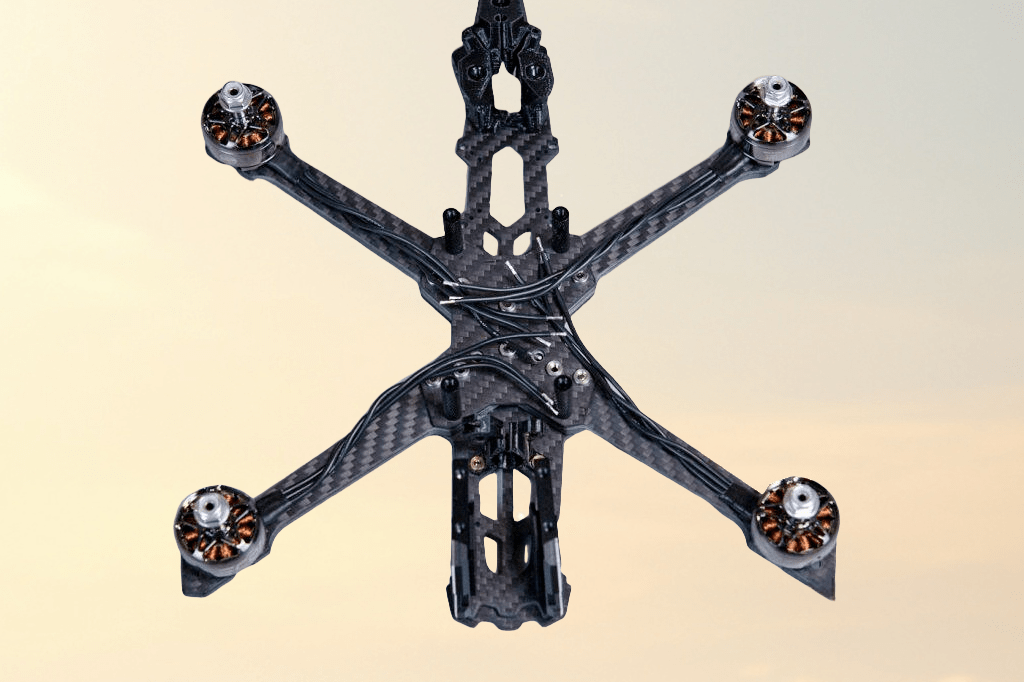
| Motors (моторы) | 4x EMAX ECO II 2207 1900KV |
| Propellers (пропеллеры) | 4x HQ 5×4.3×3 V2S |
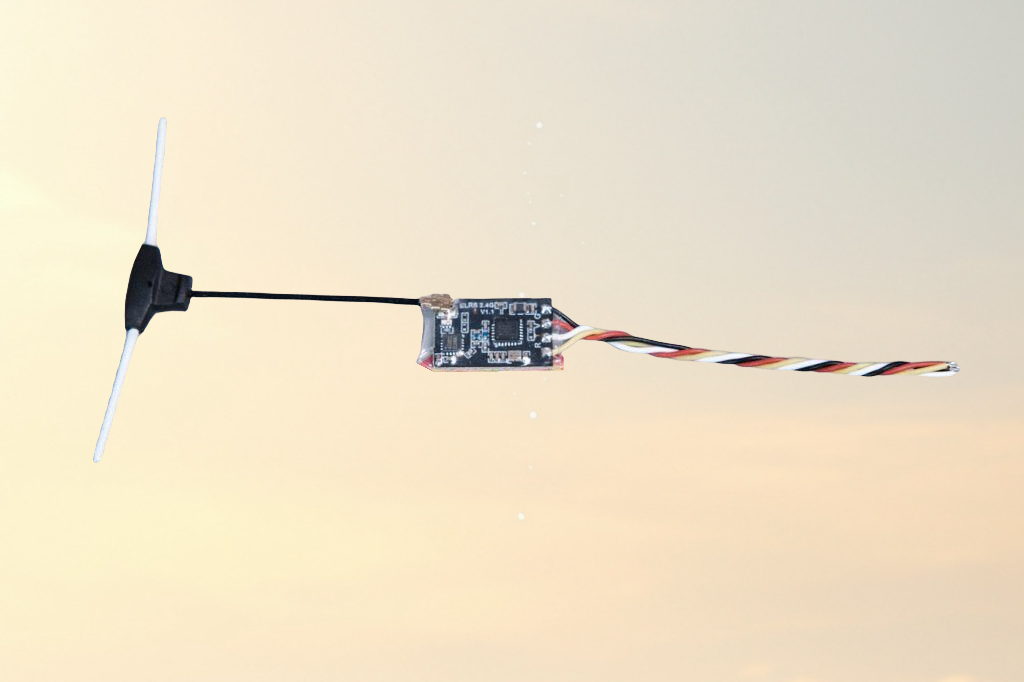
| Receiver (Приемник) | BetaFPV ELRS 2.4GHz Nano |
| FPV Setup (видеосистема) | DJI O4 Pro Air Unit |
В этой применяется цифровая видеосистема - DJI O4 Pro Air Unit. Если нужно собрать аналоговый FPV-дрон, ознакомьтесь с другим руководством: Ссылка
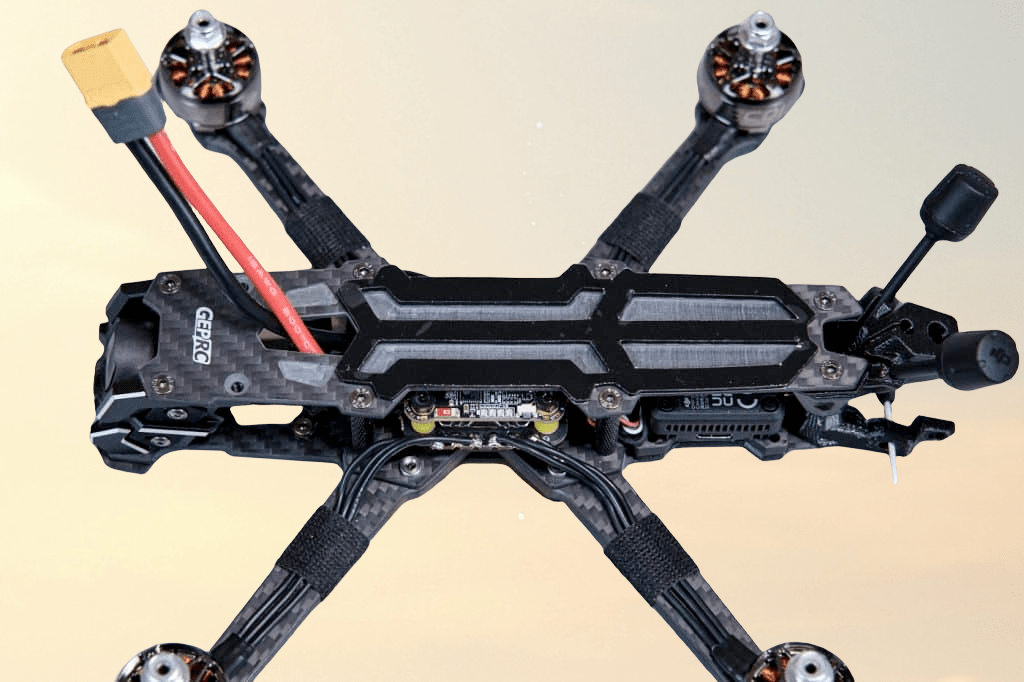
Рама
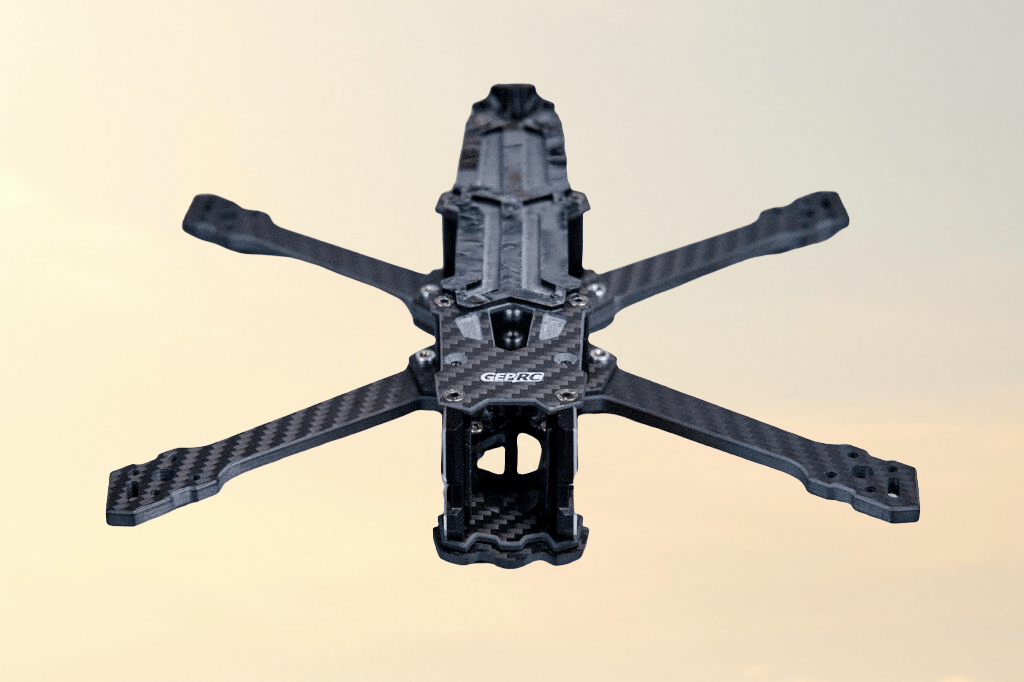
Рама — это прочная конструкция, которая соединяет все компоненты дрона.
Для этого руководства выбрана рама GEPRC Vapor. Это отличный выбор благодаря высокому качеству изготовления.
Полетный контроллер и ESC
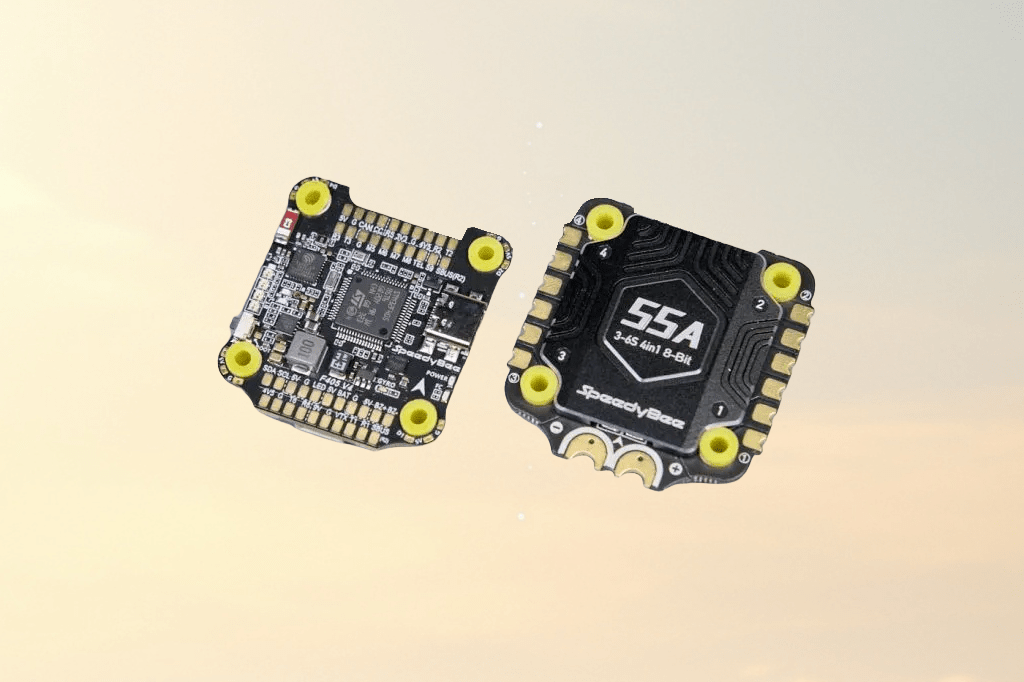
Покупка полетного контроллера (FC) и ESC в виде стека — правильное решение, т.к. о совместимости компонентов уже подумали за вас. Для этого руководства выбран стек Speedybee F405 V4.
Двигатели
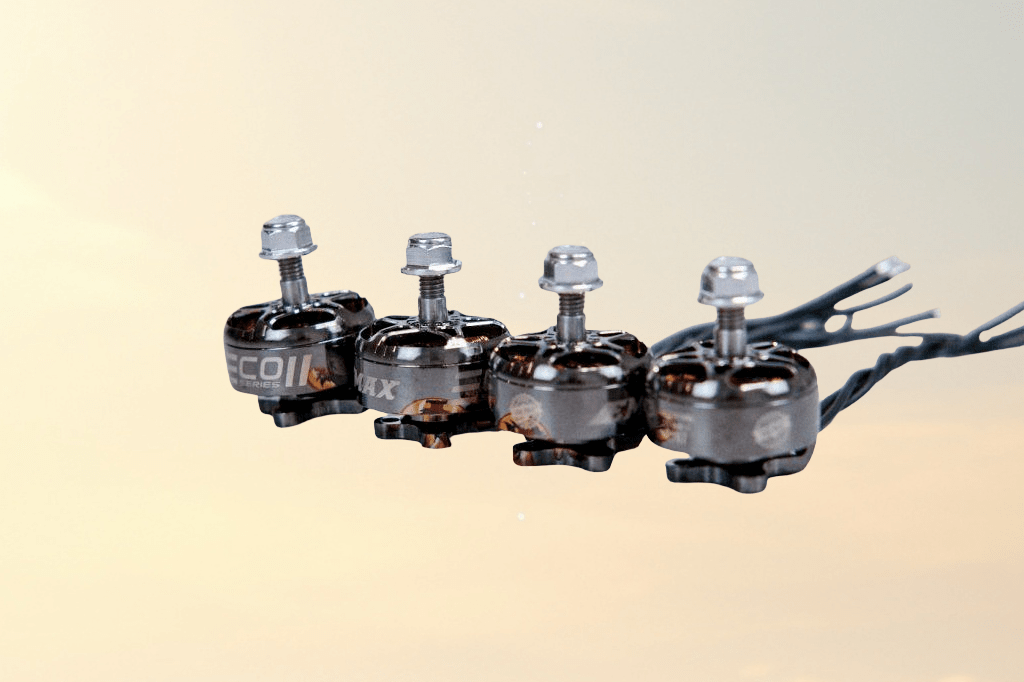
FPV-двигатели сегодня удивительно похожи по производительности, особенно на начальном уровне. Бюджетные варианты, такие как серия EMAX ECO II, вполне подходят для новичков.
Для 5-дюймового FPV-дрона размеры двигателей, такие как 2306, 2207 и 2208, все являются допустимыми вариантами. Лично я считаю, что 2207 находится в золотой середине между производительностью и весом.
Важным фактором также является KV двигателя - колличество оборотов на один вольт управляющего напряжения. Для сборки с использованием 6S батареи рекомендуется выбирать двигатели с KV в диапазоне от 1600 до 2000. Более высокий KV обеспечивает излишне агрессивную и энергозатратную производительность. В этой сборке выбор сделан на двигатели с KV 1900, поскольку следующий более низкий показатель (KV 1700) кажется слишком низким.
FPV-система

Видеосистема DJI O4 Pro — мой первый выбор для 5-дюймового фристайл-дрона. Она предлагает лучшие качество изображения и надежность сигнала, а также отличное качество сборки.
Радиоприемник
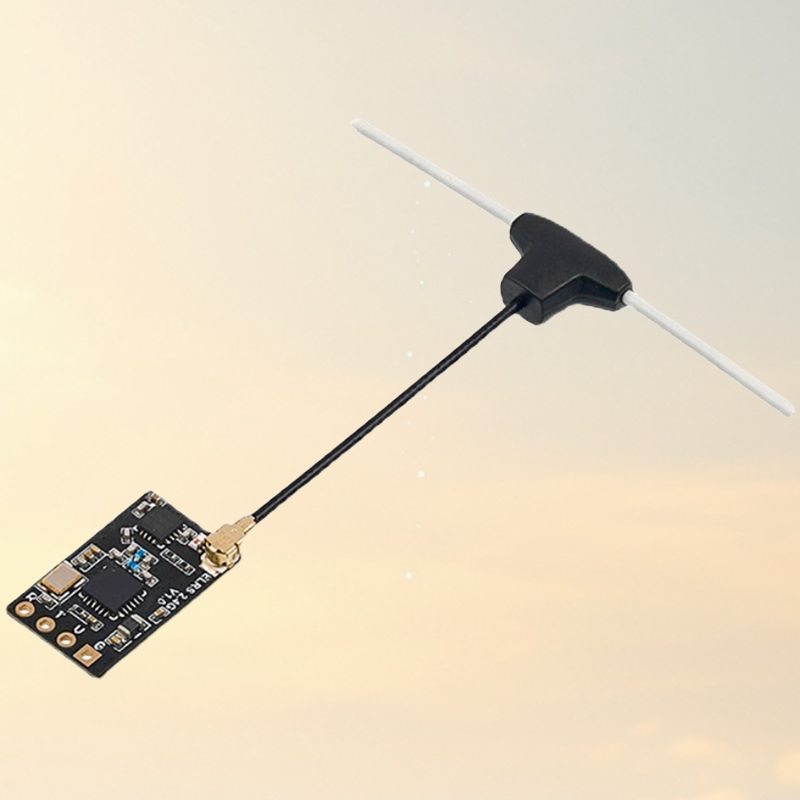
Выбор вашей аппаратуры управления определяет тип приемника (RX), который вы будете использовать.Лучше если ваш передатчик должен поддерживать ExpressLRS (ELRS), который в настоящее время, чаще всего, является главным выбором для огранизации радиоканала управения дроном. ExpressLRS доступен по цене, имеет высокую производительность и невероятно надежен.
Многие производители выпускают ExpressLR приемники и передающие модули. Вы можете выбрать любые из них, и при условии, что они поддерживают ExpressLRS, они будут работать вместе. Для этой сборки выбран приемник BetaFPV ELRS 2.4GHz Nano, который является одним из самых дешевых вариантов на рынке и при этом, прекрасно работает.
Инструменты и материалы
Для сборки дрона вам понадобятся:
- Паяльник, флюс и припой
- Шестигранные отвертки (размеры 1.5 мм, 2.0 мм и 2.5 мм)
- Отвертка с плоским шлицем
- Ножницы для зачистки проводов
- Изолента или тканевая лента
- Фиксатор резьбы (например, Loctite)
- Цифровой мультиметр
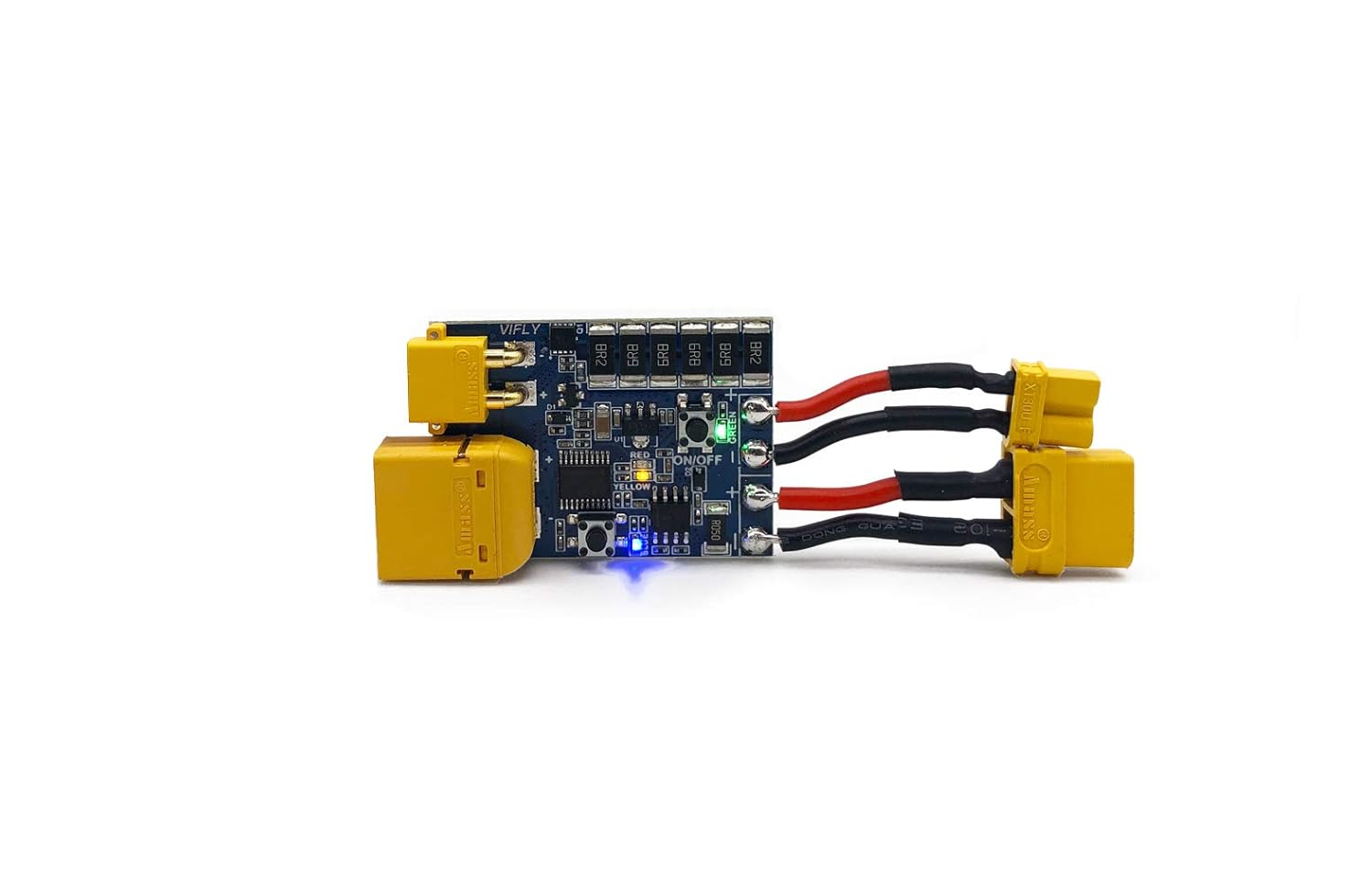
- Short Saver (Smoke Stopper) Защита от короткого замыкания
Этапы сборки FPV-дрона
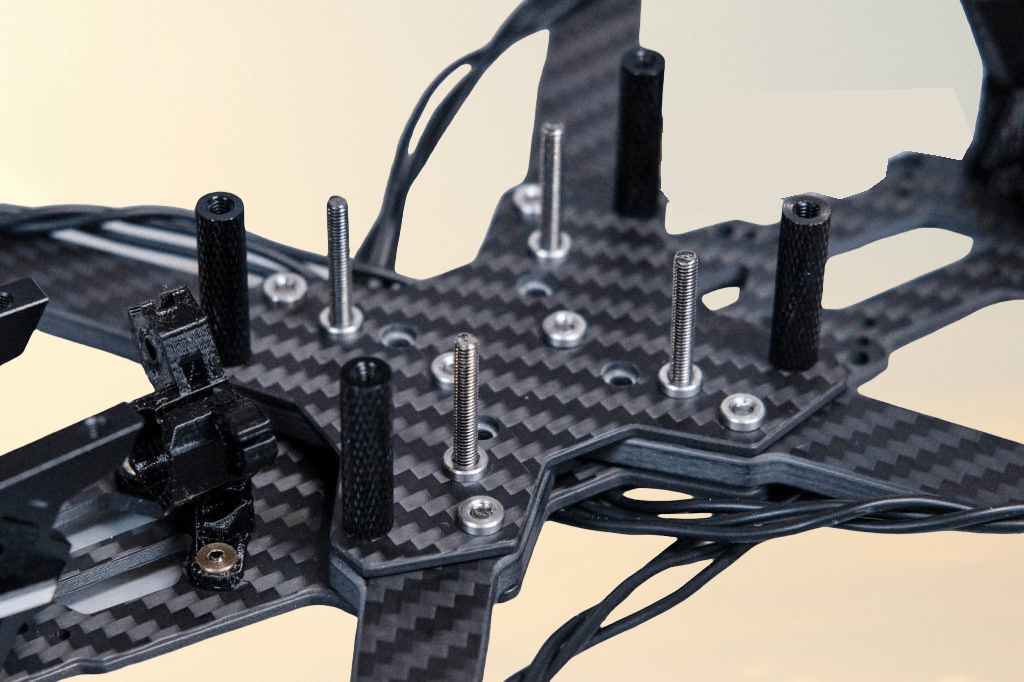
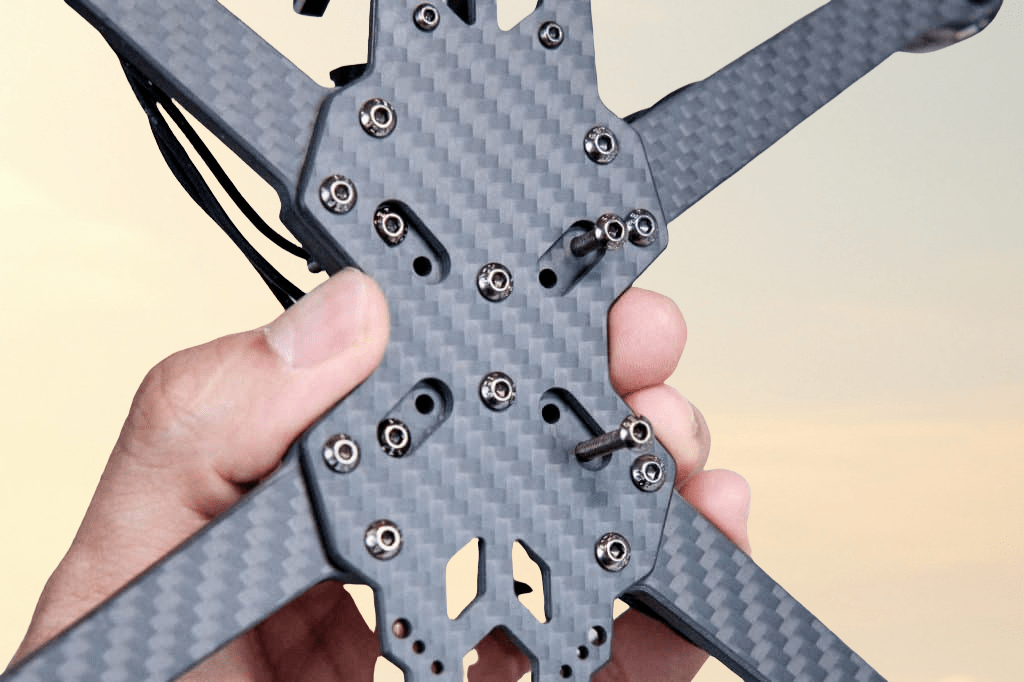
1. Сборка рамы
2. Установка двигателей
Убедитесь, что вы используете правильную длину винтов и применяете фиксирующий состав на резьбу.

Теперь пришло время установить на лучи четыре мотора. Моторы EMAX ECO II поставляются с винтами разной длины. Нужны винты с длиной резьбы 7 мм, которые подходят для лучей толщиной 5 мм.
Настоятельно рекомендуется на винтах двигателя использовать фиксатор резьбы (например, Loctite), так как вибрации со временем могут привести к ослаблению крепежа.

Некоторые сборщики используют три или два винта для экономии веса, но я рекомендую использовать все четыре винта для максимальной прочности.
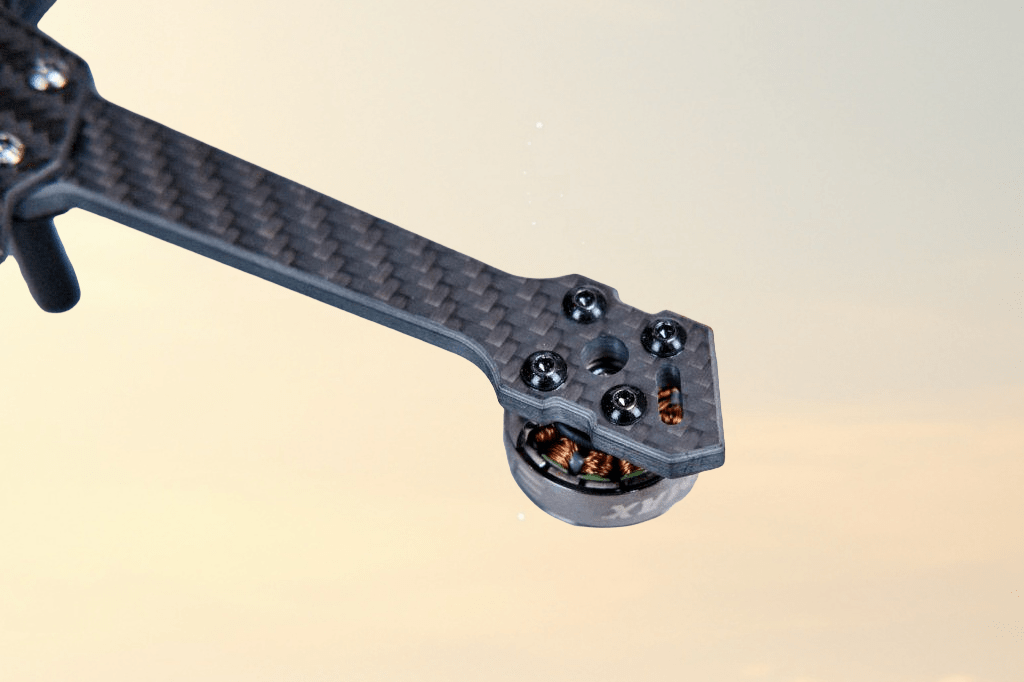
Внимание: Перед тем как полностью затянуть винты двигателя, убедитесь, что они не слишком длинные и не упираются в обмотки двигателя.
3. Схемы подключения
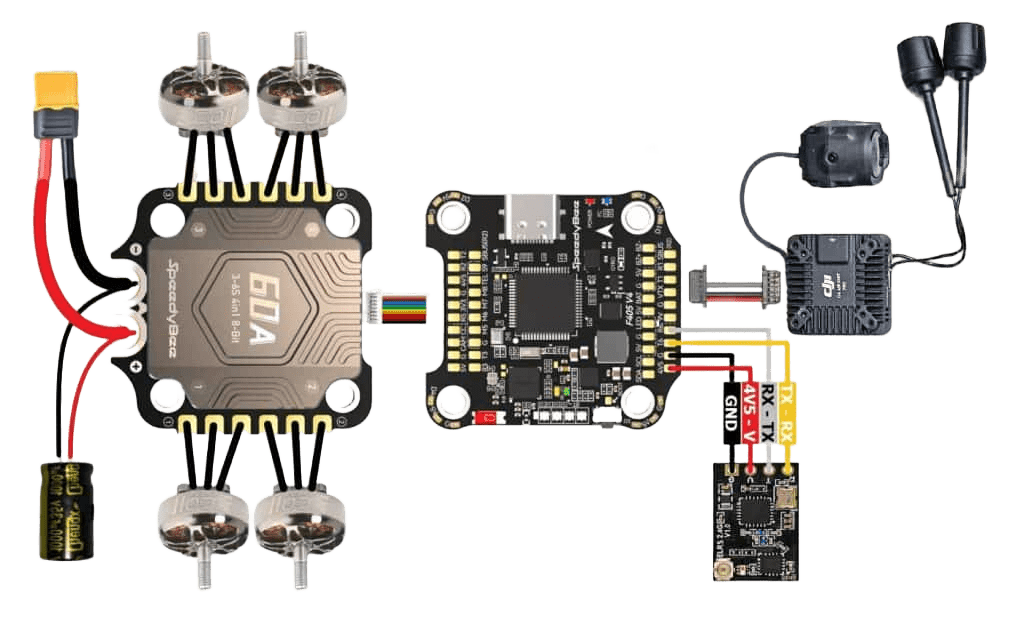
Перед тем, как резать провода, выполните "сухую" сборку, чтобы определить нужную длину и расположение компонентов.
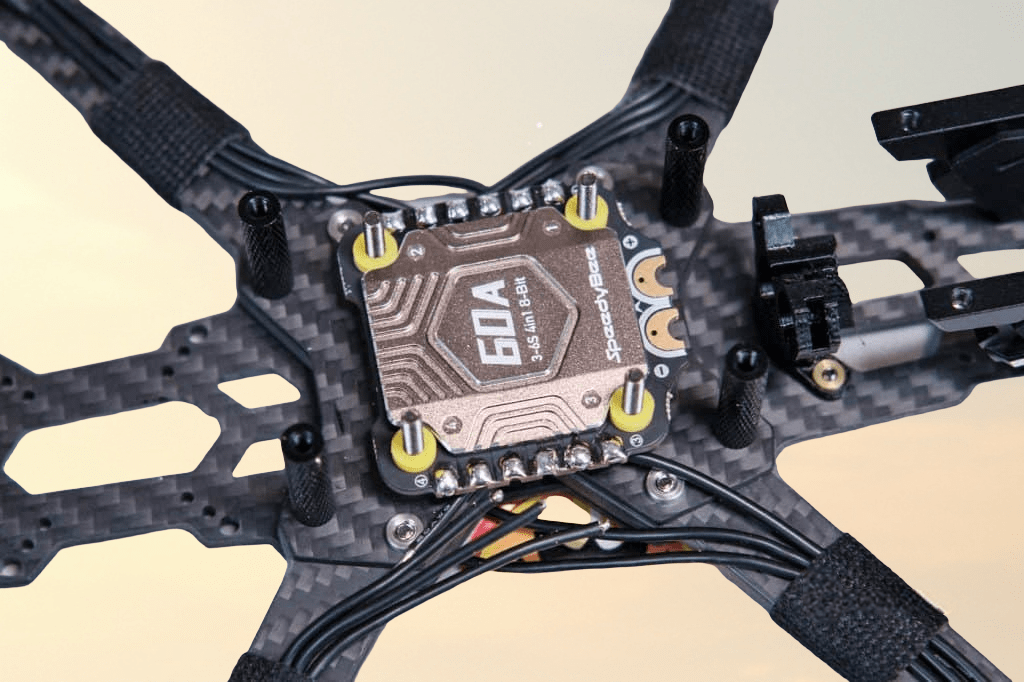
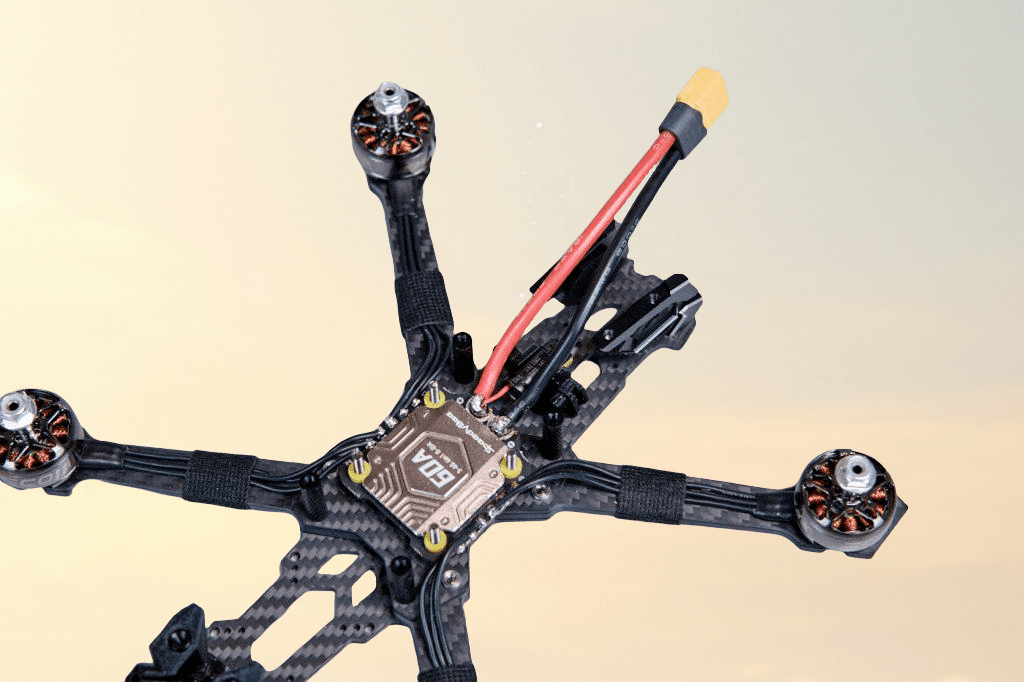
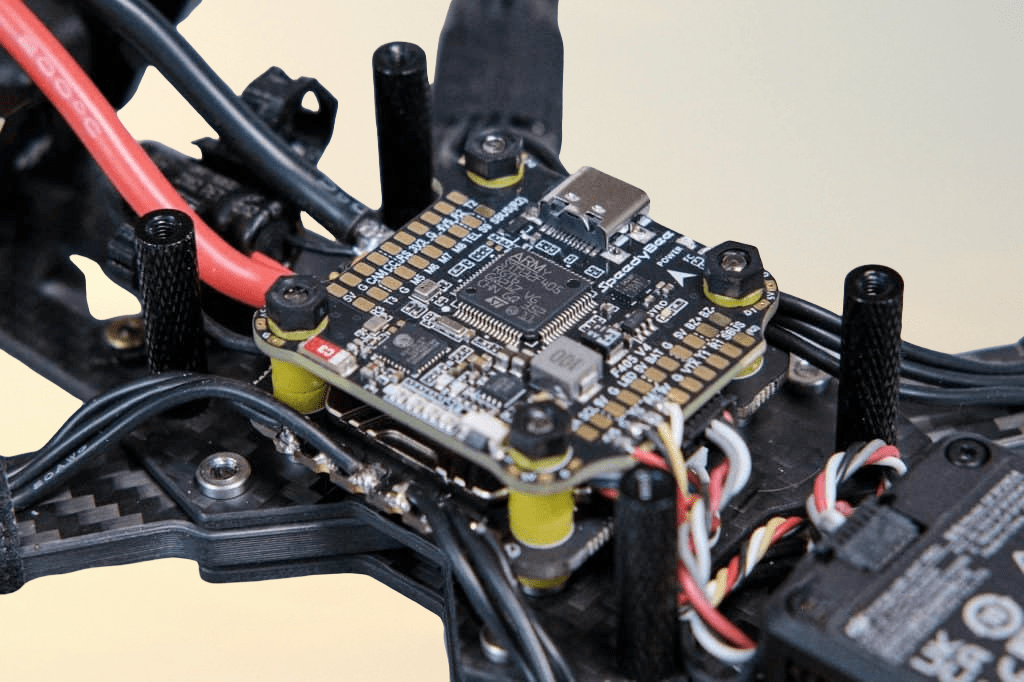
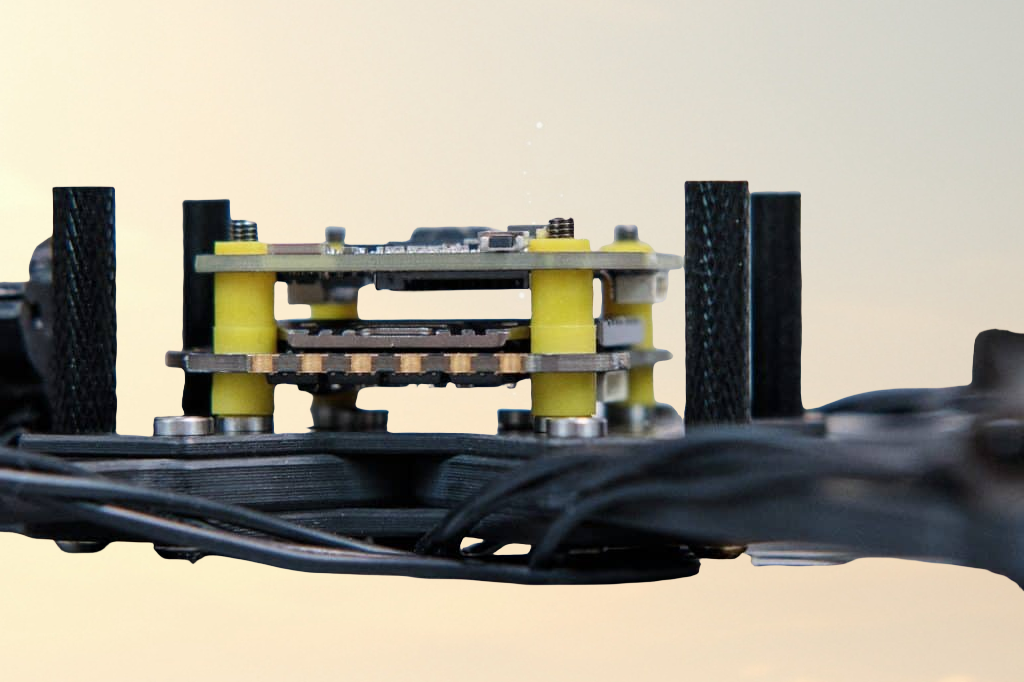
4. Установка платы ESC
Убедитесь, что силовые контактные площадки ESC обращены в правильную сторону. В раме Vapor питание подаётся через центр, поэтому ESC нужно повернуть на 180°.
Наденьте платы 4in1 ESC и FC на болты. Обычно силовые колодки ESC (+ и -) должны быть направлены назад. Однако, поскольку в раме Vapor провод аккумулятора проходит через середину, лучше всего повернуть ESC на 180 градусов. Это означает, что позже в Betaflight вам придется изменить порядок расположения двигателей (не волнуйтесь, я объясню, как это сделать).
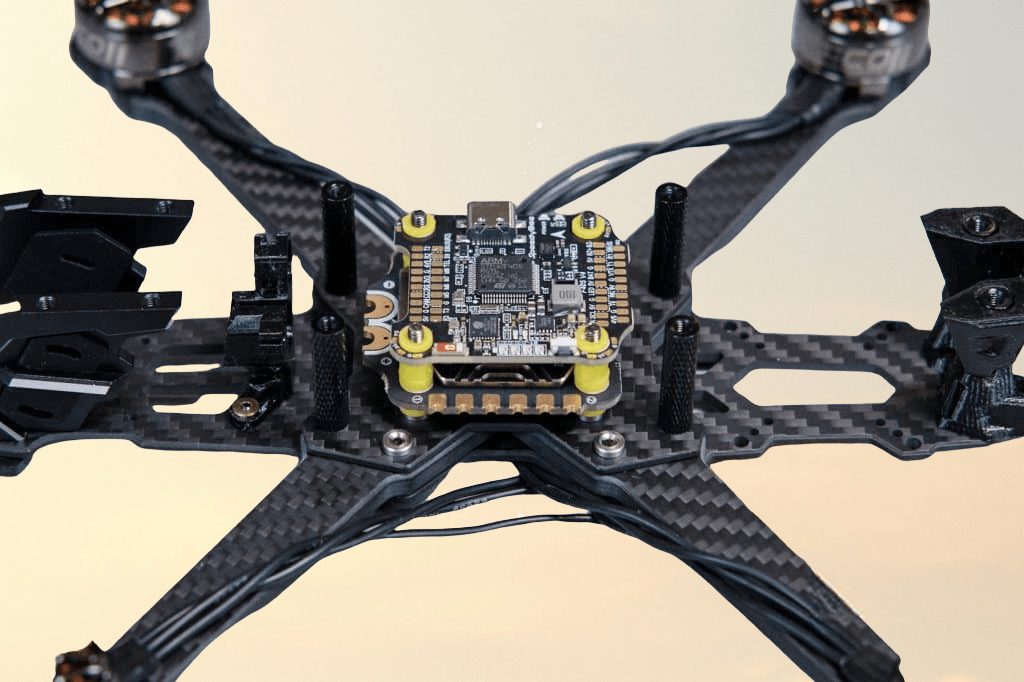
Внимательно проверьте - между нижней частью ESC и рамой, а также между платами ESC и FC ничего не должно соприкасаться.
Далее мы припаяем моторы к ESC.
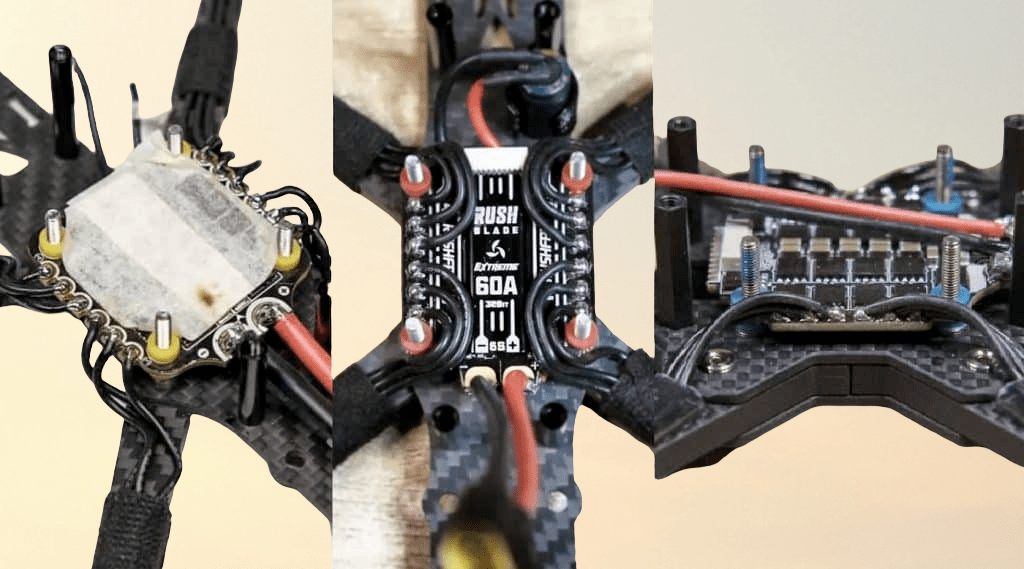
Существует три распространенных способа прокладки проводов моторов:
- Простая и обычная прокладка: Просто припаяйте провода непосредственно к колодкам ESC. Это быстро и легко, но сборка будет выглядеть не профессионально. Если вы новичок в пайке, рекомендуем воспользоваться этим способом.
- Аккуратная прокладка вокруг винтов стаба: Провода аккуратно проложены вокруг винтов. Выглядит аккуратно, провода мотора скрыты, когда FC установлен сверху. Этот вариант требует более длинных проводов и поэтому добавляет несколько граммов дополнительного веса.
- Плотная укладка проводов (мой любимый вариант): Провода обрезаются как можно короче. Очень чистый эстетический вид, очень эффективный, но вы должны отрезать провода точной длины, и их сложно паять, так как провода уложены друг на друга.
Закрепите провода двигателя на кронштейнах матерчатой или электрической лентой. В комплект рамы Vapor входят пластиковые трубки для защиты проводов, они выглядят аккуратно и профессионально, но я нашел их непрактичными и тяжелыми.
Отрежьте около 2 мм от кончиков проводов и залудите концы. Припаяйте все провода двигателя к площадкам ESC 4in1 (сначала пролудите площадки хорошим слоем припоя, а затем припаяйте провода).
Не беспокойтесь о порядке проводов мотора - вы сможете легко изменить направление вращения мотора позже в Betaflight.
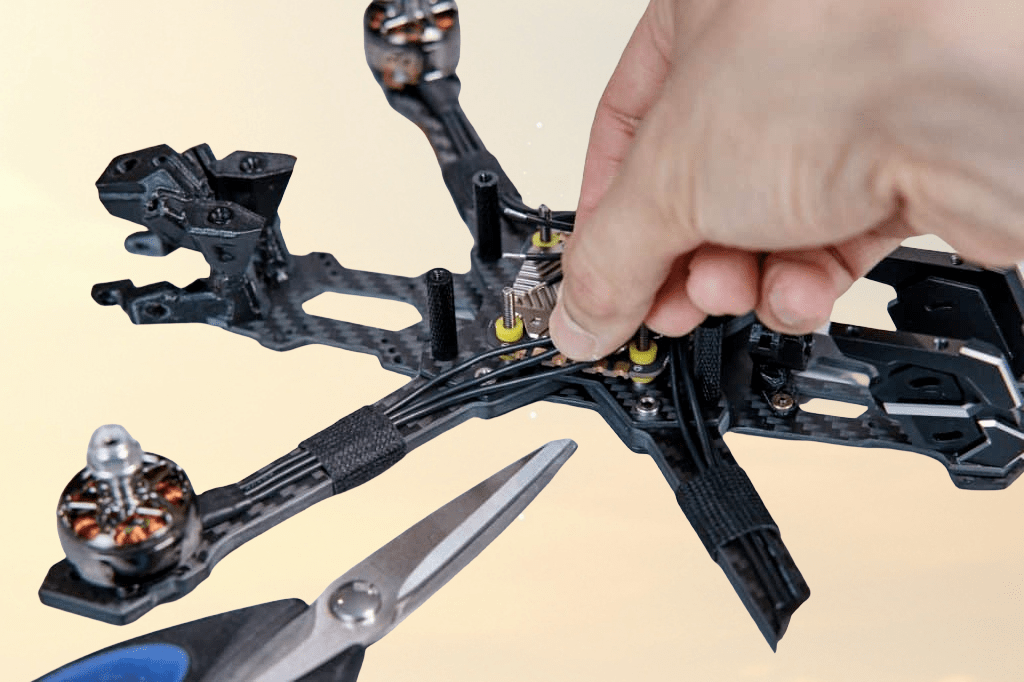
Теперь припаяйте конденсатор, который поставляется в комплекте со стеком Speedybee. Вставьте прилагаемые трубки из термоусадочной пленки, укоротите и согните ножки. Припаяйте конденсатор к колодкам аккумулятора (+ и -) на ESC.
Обратите внимание на полярность - отрицательная ножка отмечена светлой полосой на конденсаторе.
Зачем нужен конденсатор? Конденсатор уменьшает скачки напряжения и электрические шумы от двигателей и ESC, защищая вашу электронику и улучшая летные характеристики вашего дрона.
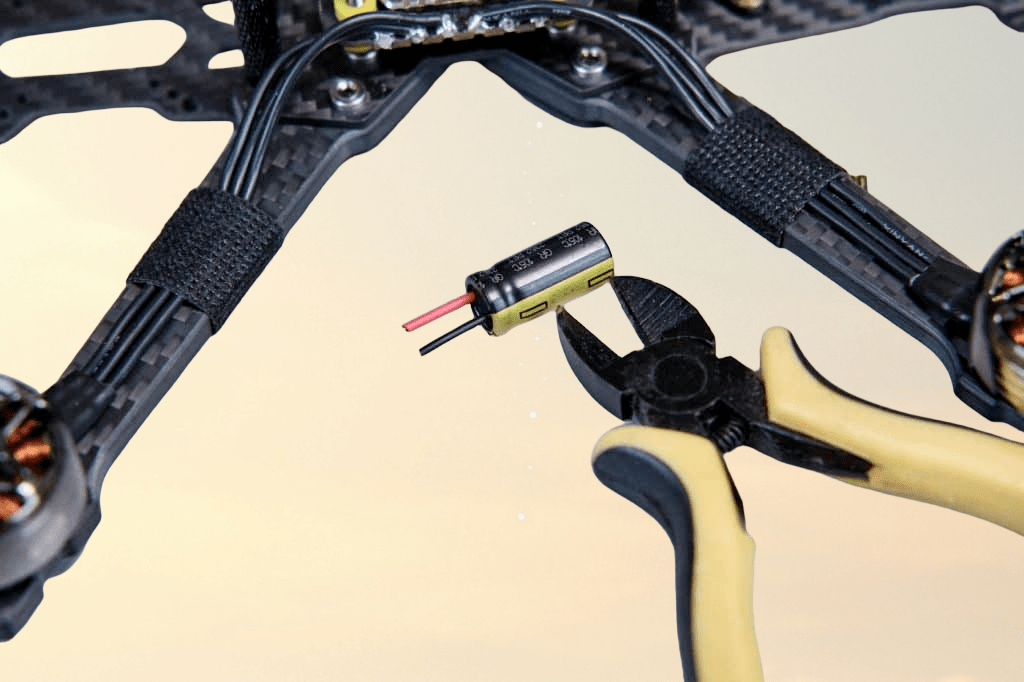
Теперь конденсатор может надежно разместиться в прилагаемом TPU-креплении.
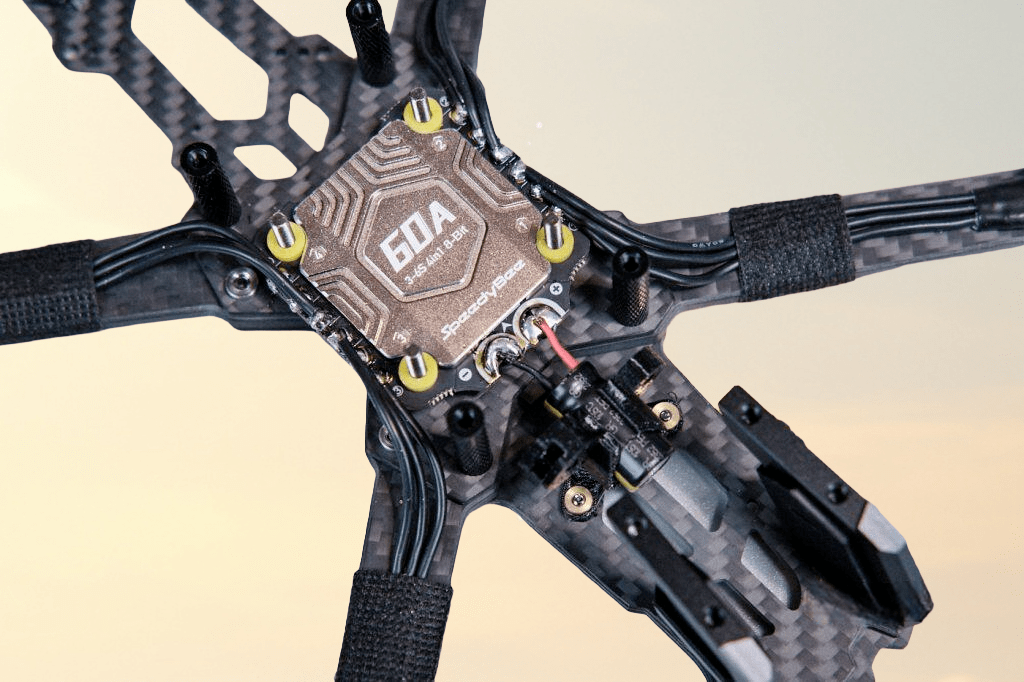
Теперь припаяйте провод питания XT60 к силовым колодкам на ESC, обратите внимание на полярность (положительный и отрицательный). Это, пожалуй, самый сложный шаг в данной сборке, поскольку требуется большое количество тепла, чтобы расплавить припой на больших медных колодках и толстых проводах. Будьте терпеливы и используйте более высокую температуру на паяльнике.
Советы по пайке:
- Для крупных площадок используйте побольше припоя и паяльного флюса (паяльной пасты), следя за тем, чтобы паяные соединения были блестящими и полными. Если вы видите жилы проводов, значит, вы нанесли недостаточно припоя.
- Нанесите больше флюса, если припой "тянется" за наконечником паяльника..
- Не стесняйтесь использовать высокую температуру при пайке больших площадок, но действуйте быстро и не перегревайте площадки слишком долго. Для проводов двигателя и XT60 используйте температуру 450°C (840°F), а для сигнальных проводов - 380°C.
5. Тестирование ESC и двигателей
Теперь мы подключим аккумулятор и проверим ESC и моторы.
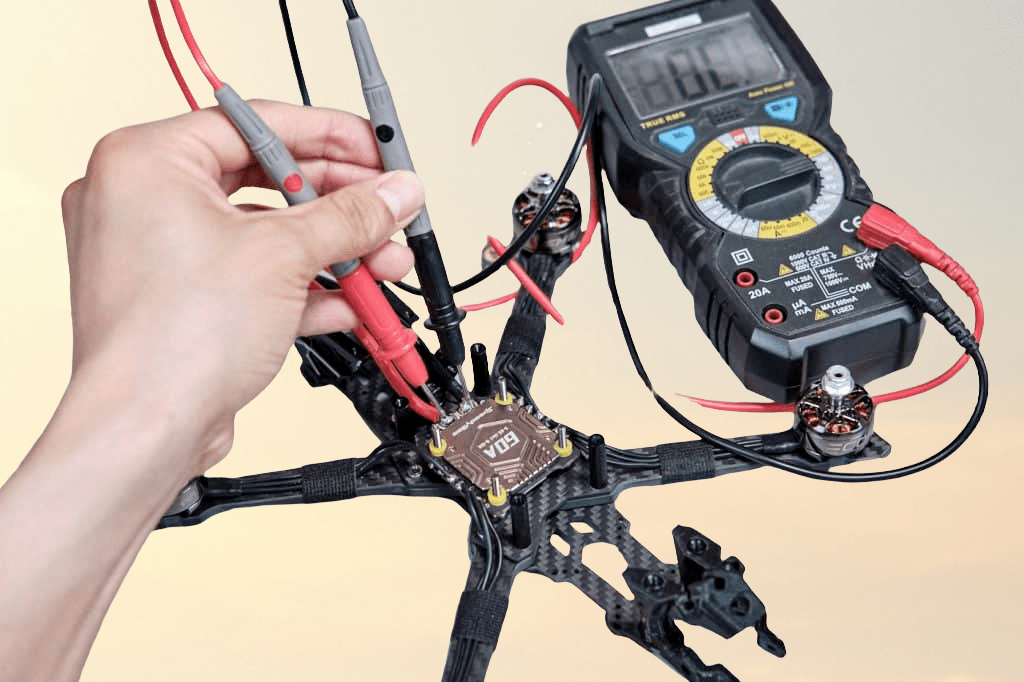
Перед тем, как подключить LiPo-аккумулятор в первый раз, убедитесь, что нет короткого замыкания. С помощью мультиметра в режиме проверки целостности цепи проверьте положительный и отрицательный полюса XT60 (или непосредственно на контактах ESC). При наличии короткого замыкания мультиметр будет издавать непрерывный звуковой сигнал. В этом случае не подключайте аккумулятор, так как это может повредить компоненты. Устраните причину короткого замыкания.
Совет: при тестировании мультиметром в режиме проверки целостности цепи может сразу раздаться короткий звуковой сигнал, за которым последует тишина - это из-за зарядки конденсаторов. Это нормально и не должно вызывать беспокойства. Если звуковой сигнал прекращается через секунду или две, все в порядке.
Подключите аккумулятор и проверьте двигатели через вкладку Motors в Betaflight Configurator. Используйте DShot300.
Теперь подключите пилотный контроллер (FC) к плате управления оборотами двигателя (ESC) с помощью прилагаемого 8-контактного кабеля и подключите пилотный контроллер напрямую к компьютеру с помощью USB-кабеля.
При первом подключении батареи настоятельно рекомендуется использовать плату защиты от короткого замыкания. Хотя это не является обязательным, это полезное вложение средств, позволяющее избежать повреждения компонентов.
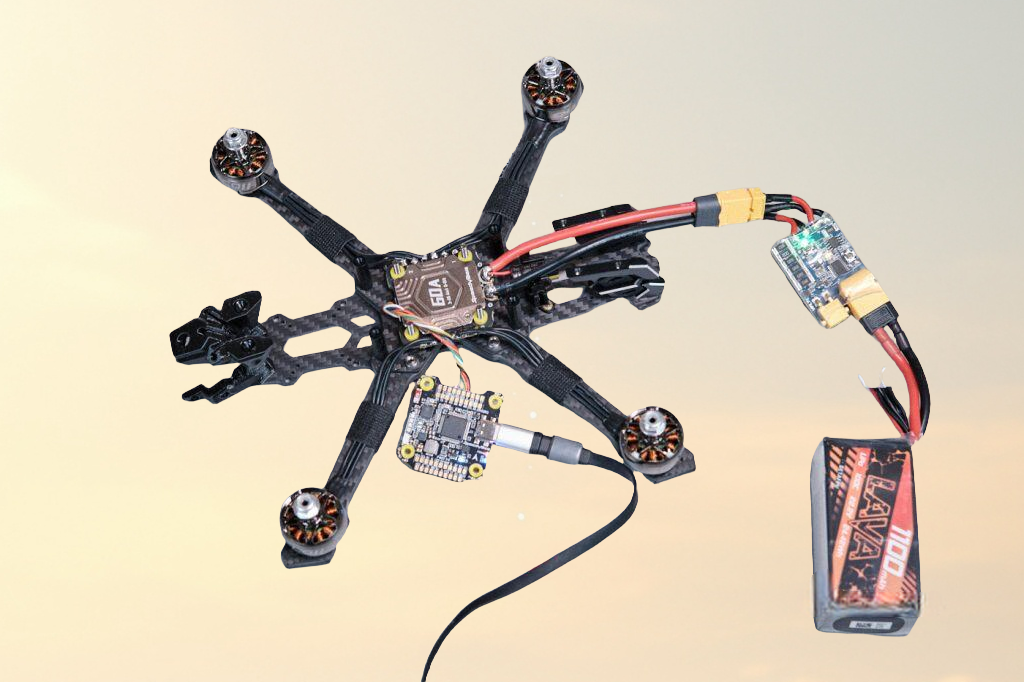
Пока не устанавливайте пропеллеры.
Чтобы протестировать двигатели, подключите аккумулятор и USB-кабель к полетном контроллеру. Откройте Betaflight Configurator и перейдите на вкладку «Двигатели».
В поле «Протокол ESC» выберите DShot300. Нажмите «Сохранить» и «Перезагрузить».
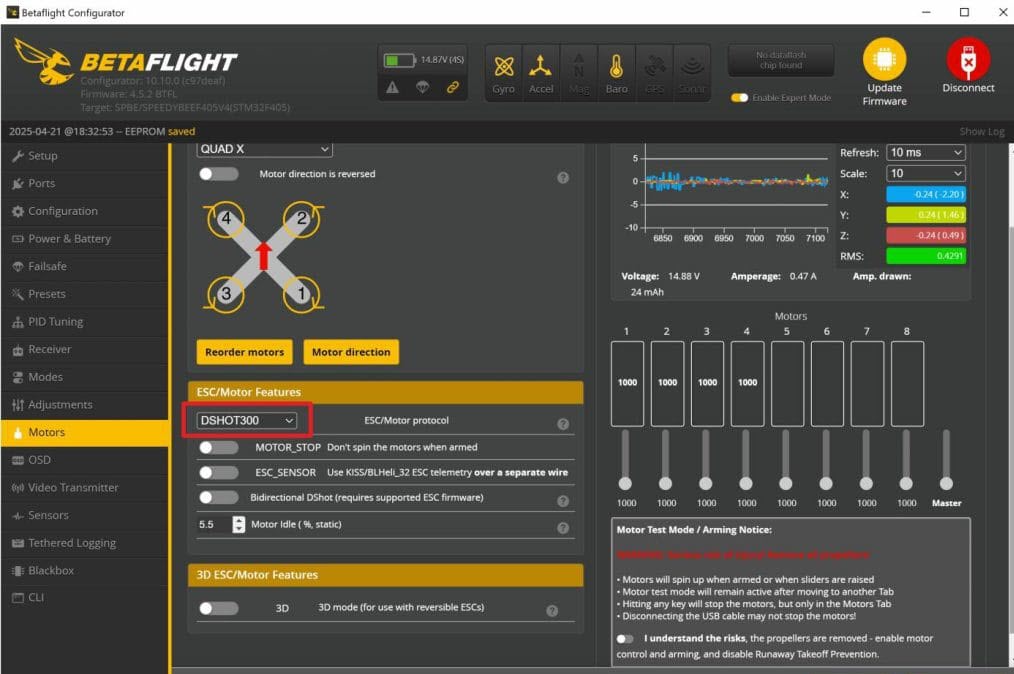
Теперь включите управление двигателями, и протестируйте их на кручение - делайте это по очереди, сдвиньте ползунок примерно на 1100, этого будет достаточно.
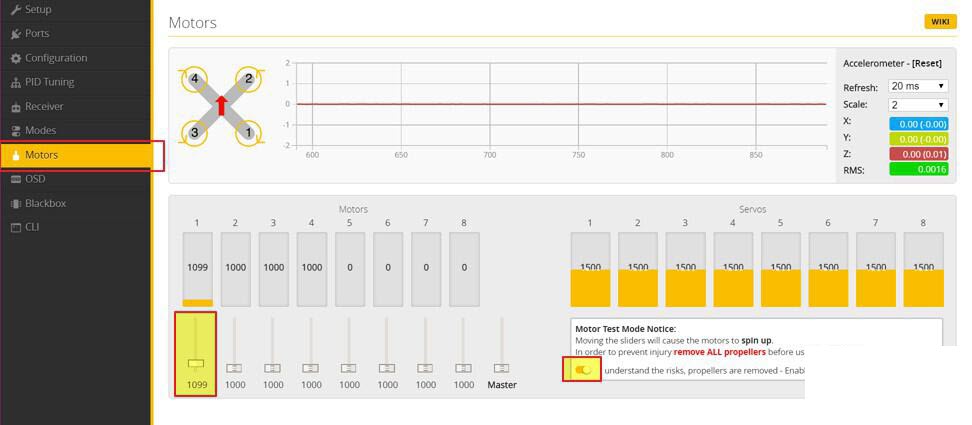
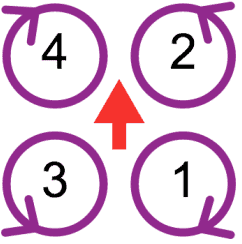
Вы должны убедиться, что вращающийся двигатель соответствует номеру на схеме, например, двигатель №1 - задний правый, двигатель №2 - передний правый и т.д. Смотрите на схему на вкладке в Betaflight.
Если порядок расположения двигателей неправильный (скорее всего, неправильный, потому что мы повернули ESC на 180 градусов в нашей сборке), вы можете легко исправить это, нажав кнопку "Reorder Motors" на вкладке motors, и просто следуйте простым инструкциям. Вы также можете исправить это с помощью команд CLI, но это довольно сложно, поэтому просто используйте инструмент в Betaflight.
После того, как порядок двигателей установлен правильно, необходимо проверить, вращаются ли они в правильном направлении. Чтобы изменить направление вращения двигателя, есть несколько способов, самый простой из которых — использовать Betaflight Configurator (вкладка «Motors).
Советы по устранению неполадок:
- Если двигатели не вращаются, убедитесь, что батарея подключена и вы включили Short Saver, если вы его используете. ESC должен издать звуковой сигнал, как только вы подключите батарею. Убедитесь, что ESC подключен к FC и что соединения контактов выполнены правильно.
- Если все, кроме одного, двигатели вращаются, возможно, неисправен
- этот конкретный ESC
- двигатель, подключенный к конктетному ESC
- сигнал ESC от FC не поступает.
Произведите диагностику через замену двигателя на заведомо исправный.
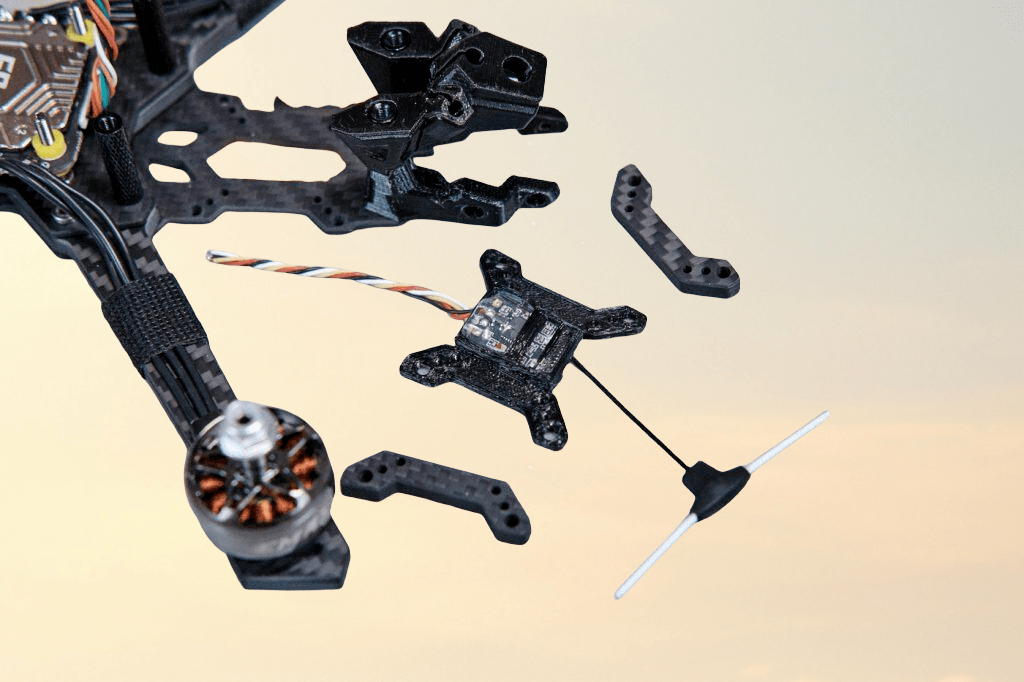
6. Настройка приемника
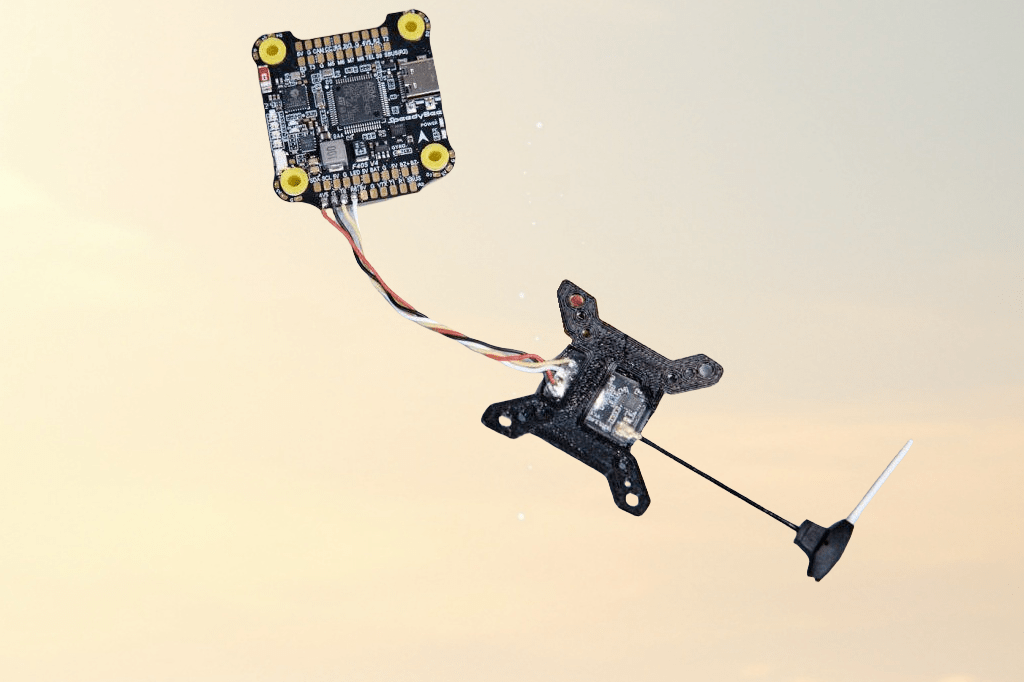
Начните с припаивания прилагаемых проводов к приемнику.
Совет: при пайке компонентов к полетном контроллеру (FC) избегайте прокладки проводов по плате. Висящие или свободно проложенные провода могут вызывать вибрации, которые негативно влияют на работу гироскопа.
Скрутите провода. Это не только поможет минимизировать электрические помехи, но и уменьшит провисание, придав вашей конструкции более аккуратный и профессиональный вид.
Хотя цвета проводов технически не имеют значения, использование единой цветовой схемы значительно упрощает устранение неисправностей. Рекомендуется использовать следующую цветовую кодировку:
Черный провод → GND (G)
Красный провод → 5V (V)
Белый провод → TX (T)
Желтый провод → RX (R)
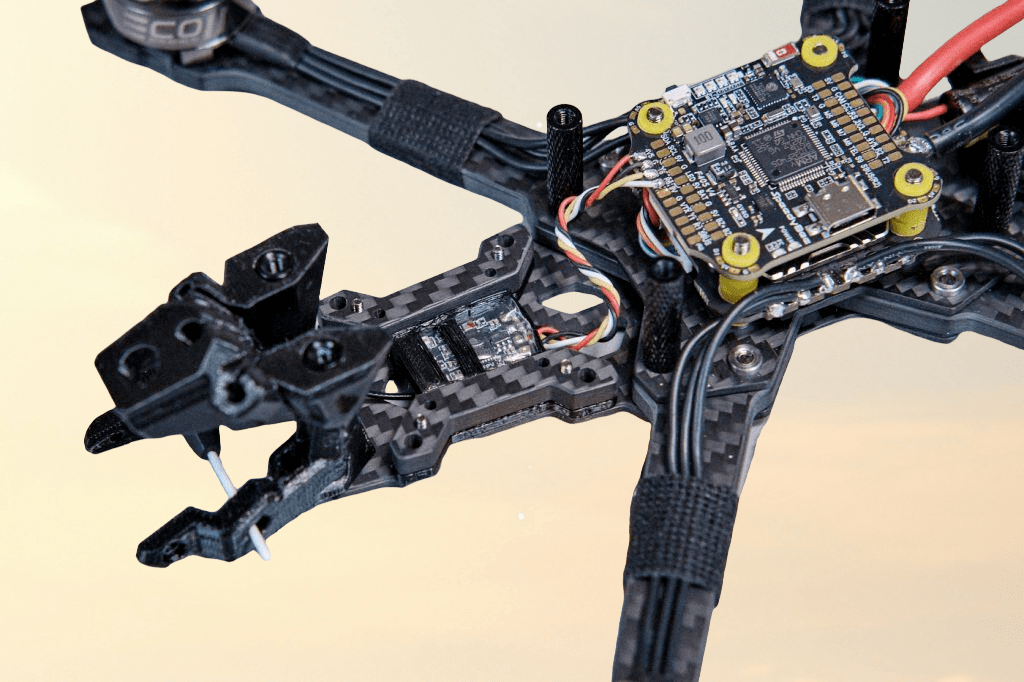
Рама включает в себя TPU-держатель, в который можно аккуратно поместить приемник ELRS.
Подключите полетный контроллер к приемнику следующим образом (от FC к приемнику):
- 4V5 → V (5V)
- G → G (земля)
- T6 → R (приемник RX)
- R6 → T (передатчик TX)
Надежно закрепите приемник и антенну в раме следующим образом.
Теперь подключите радио к приемнику, следуя инструкциям этого руководства: [Биндинг. Инструкция по настройке и сопряжению систем передачи данных]
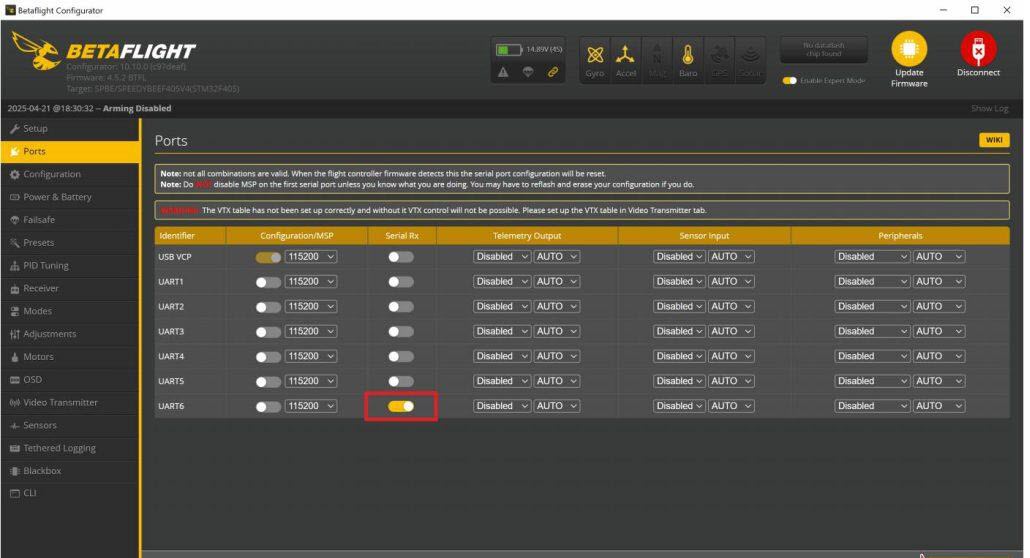
После этого мы можем настроить приемник в конфигураторе Betaflight:
- Перейдите на вкладку «Порты» и включите «Serial RX» для UART, подключенного к приемнику (в нашем примере это UART6, потому что мы подключили его к T6 и R6). Нажмите «Сохранить».
- На вкладке «Приемник» выберите «Serial (via UART)» в режиме приемника и выберите «CRSF» в Serial Receiver Provider. Включите телеметрию. Нажмите «Сохранить».
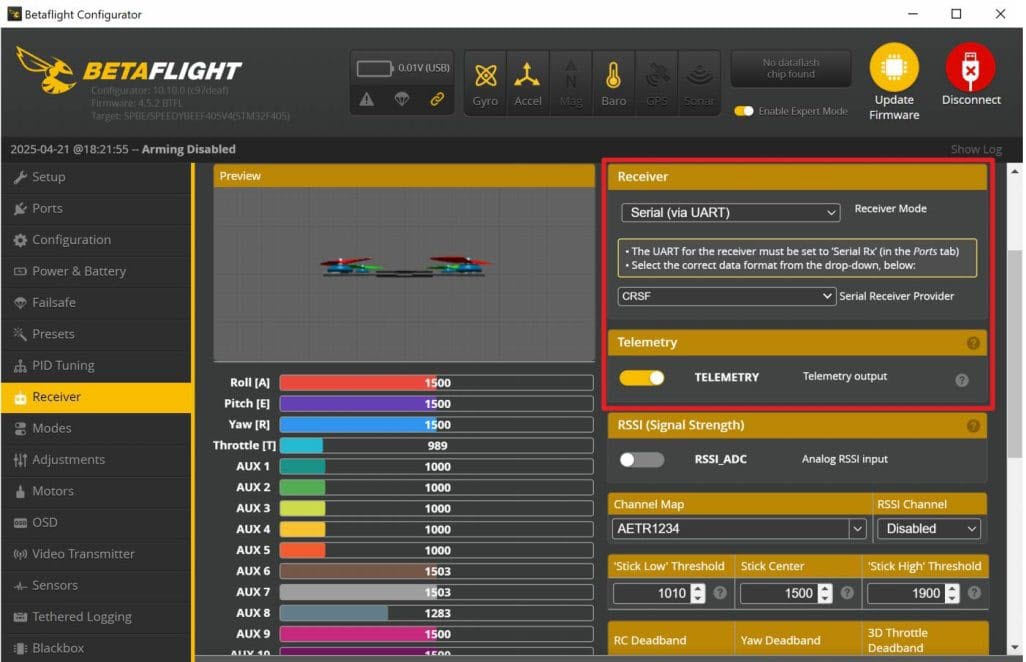
После этого приемник должен работать. Чтобы убедиться в этом, перейдите на вкладку «Приемник» и посмотрите, изменяются ли полоски (значения каналов) при перемещении джойстиков на радиоуправлении. Если реагируют не те каналы, попробуйте другую карту каналов, например «default (AETR)» или «TAER».
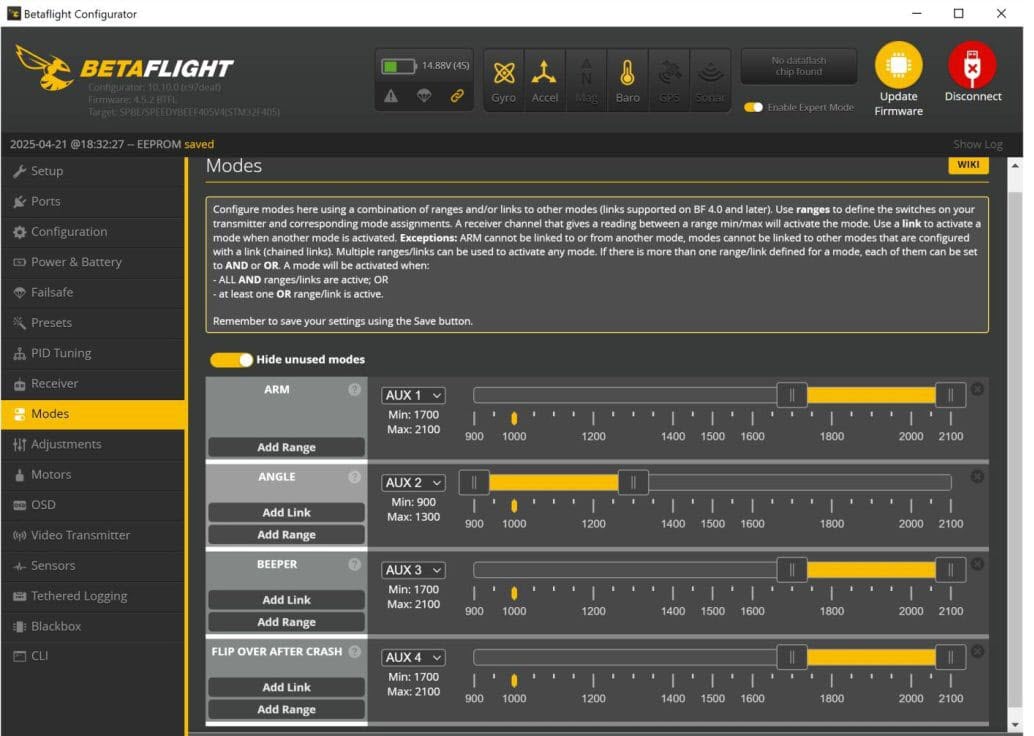
Вам необходимо настроить переключатели на Радио для арма дрона, режимов полета и звукового сигнала.
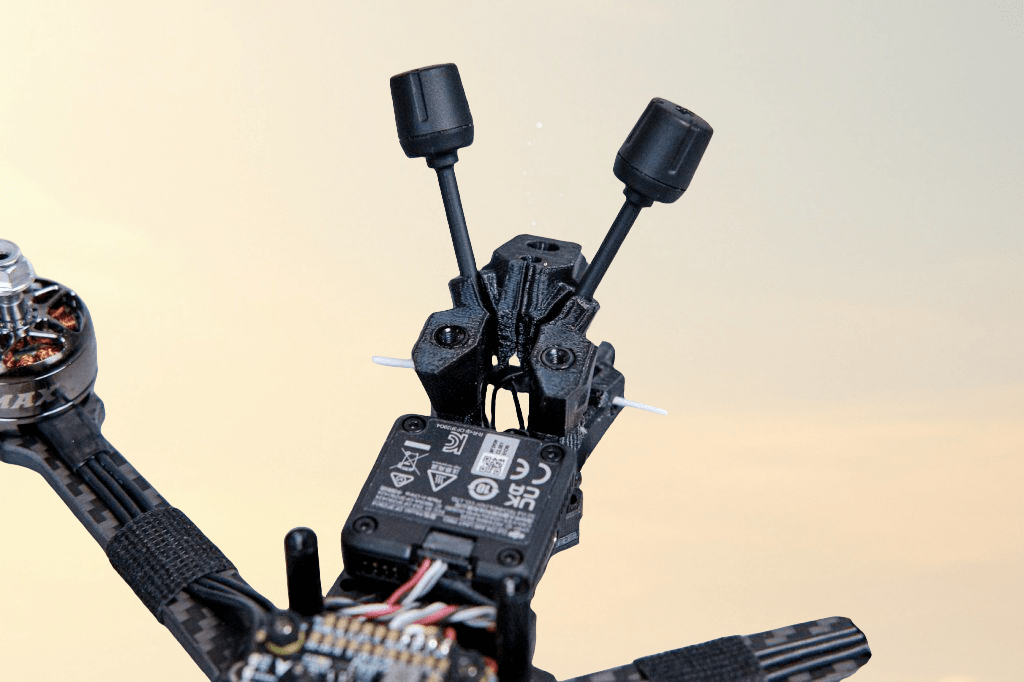
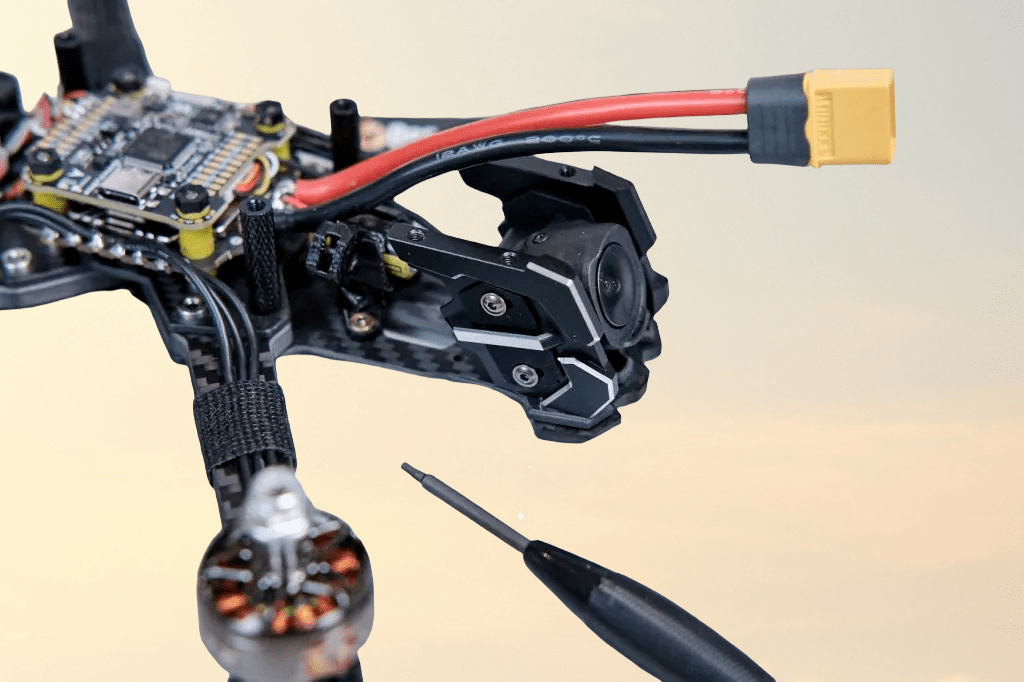
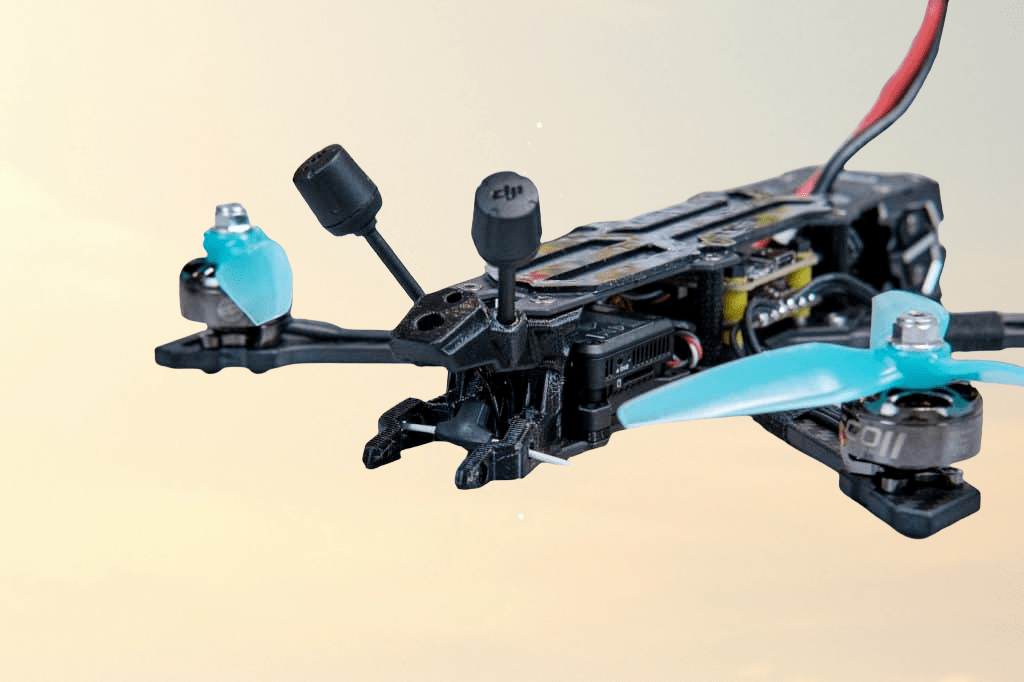
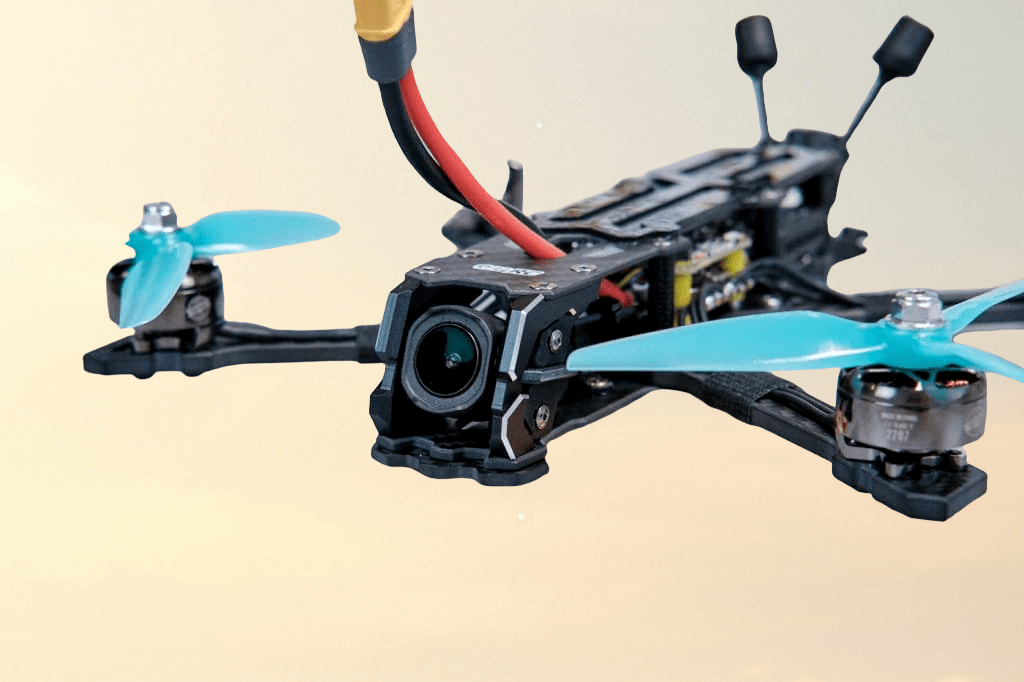
7. Установка DJI O4 Pro
Подключите DJI O4 Pro к FC с помощью предоставленного кабеля. Убедитесь, что антенны установлены правильно.
Надежно вставьте две антенны O4 Pro в отверстия в заднем креплении антенны из TPU.
Если вы управляете дроном с помощью ExpressLRS, вам может понадобиться удалить провода SBUS и GND из соединительного кабеля O4. Эти провода предназначены для пульта дистанционного управления DJI, и если оставить их подключенными, это может привести к конфликтам, если вы используете тот же UART для другого устройства.
Установите камеру между силиконовыми демпферами, входящими в комплект рамы.
Если вы новичок в полетах, вам лучше начать с меньшего угла наклона камеры, например 10°-15°. Когда вы освоитесь и начнете летать быстрее, вы можете увеличить угол наклона до 20° или даже 30°, чтобы улучшить обзор вперед на скорости.
Теперь мы настроим OSD (On-Screen Display) для отображения важных данных о полете, таких как напряжение батареи, время полета и предупреждения, прямо в очках DJI.

Полное пошаговое руководство по настройке OSD: [OSD O4. Статья не готова]
Краткое описание процесса:
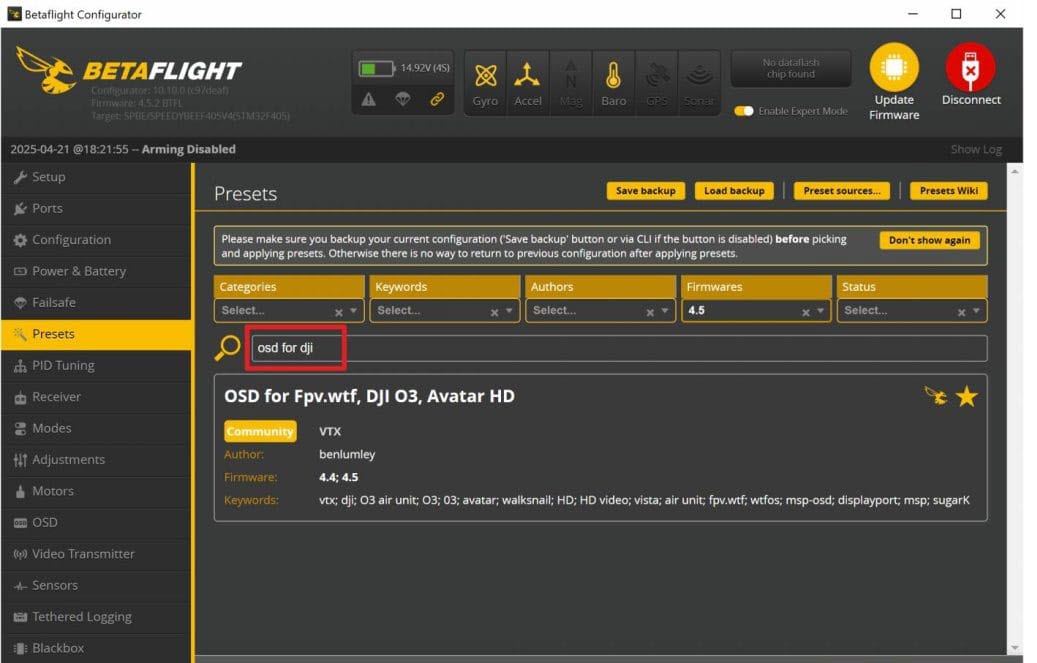
- В Betaflight Configurator перейдите на вкладку «Presets» (Предустановки).
- Найдите «OSD for DJI» (OSD для DJI).
- Выберите найденную предустановку.
- В настройках выберите «map to displayport» (сопоставить с дисплейпортом), «set HDOSD» (установить HDOSD) и UART, к которому подключен O4 (в нашем примере это UART1).
- Все готово.
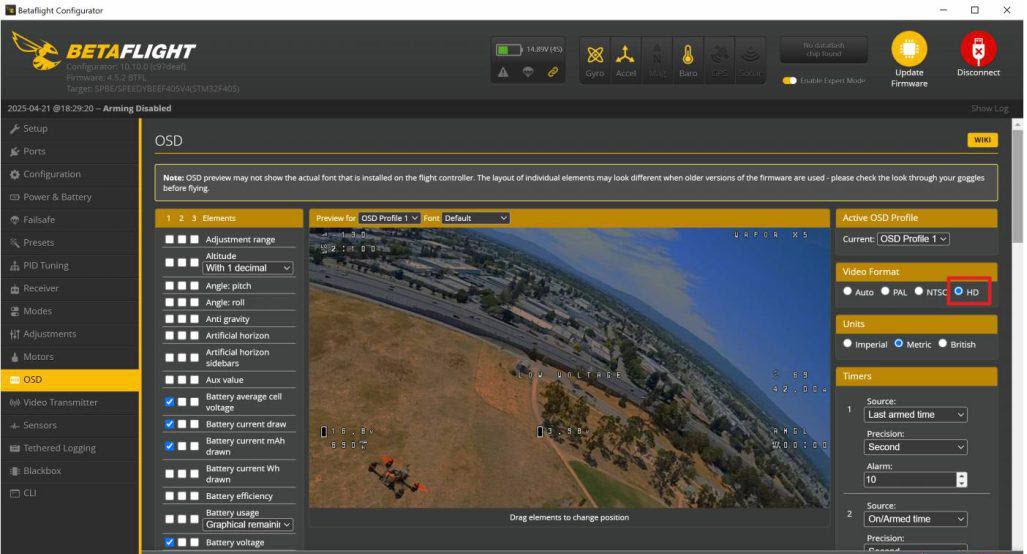
Теперь перейдите на вкладку OSD, включите необходимые элементы и перемещайте их по своему усмотрению. Убедитесь, что в разделе "Формат видео" вы выбрали HD, чтобы использовать все доступное пространство экрана.
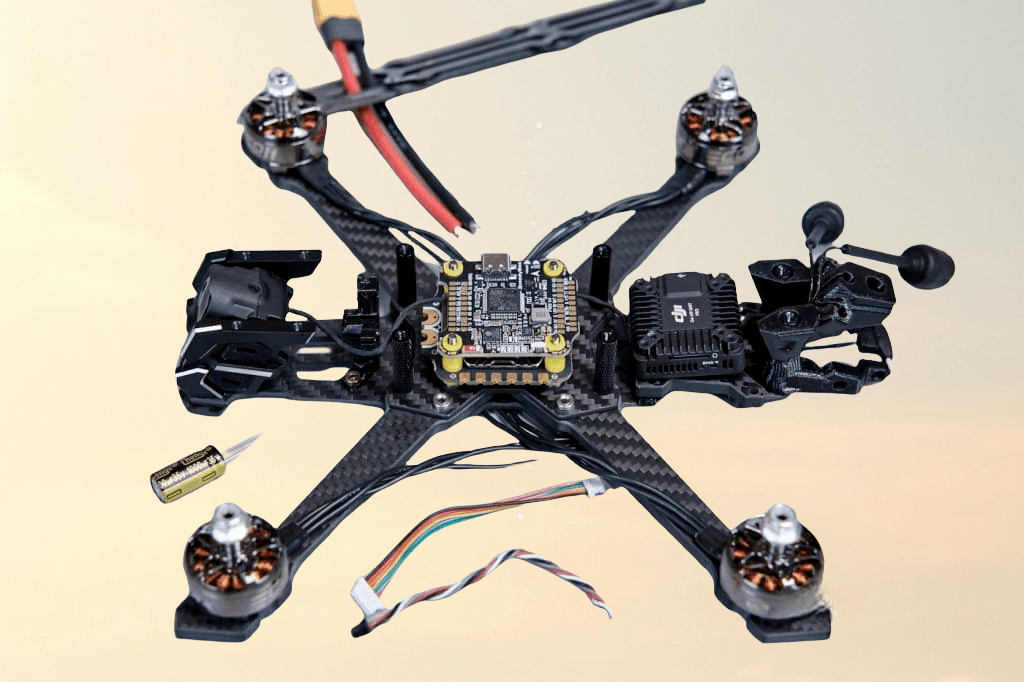
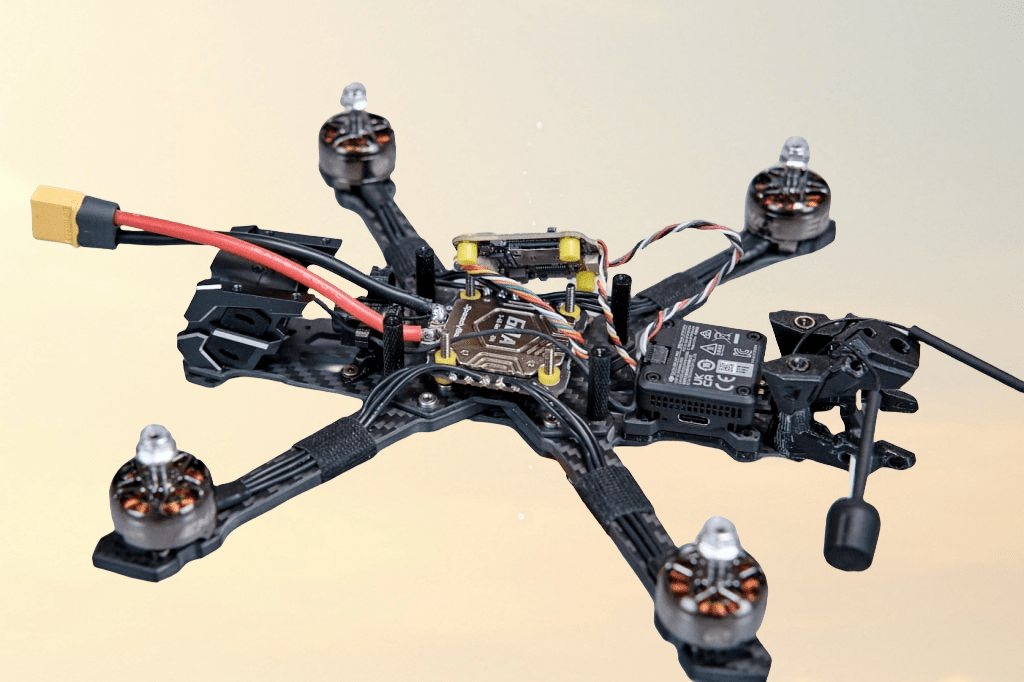
8. Завершение сборки
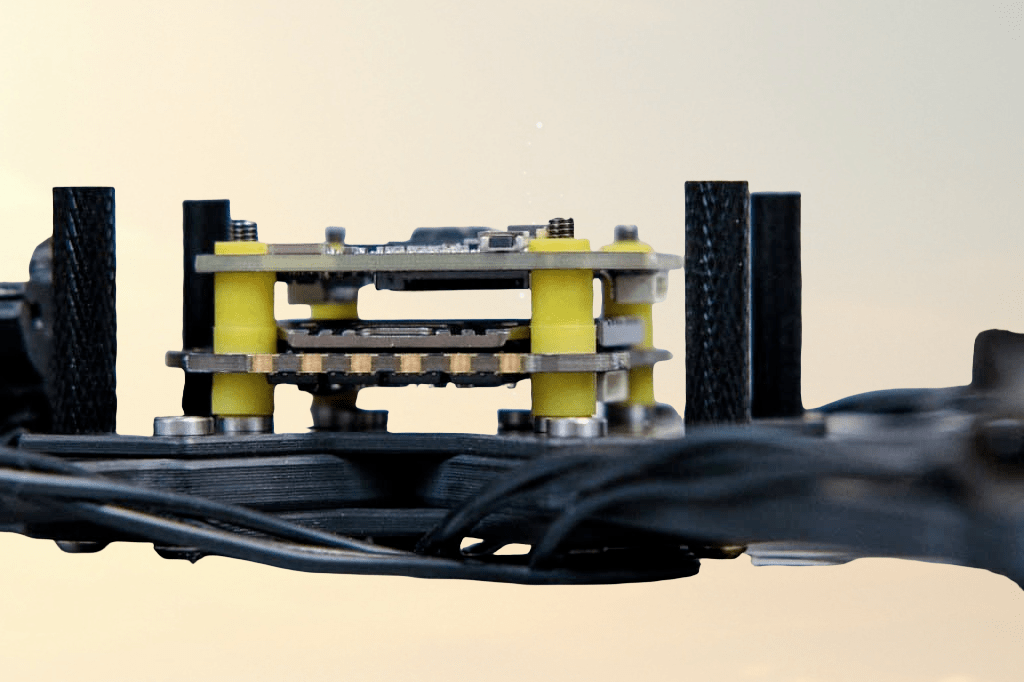
Закрепите полетный контроллер (FC) нейлоновыми гайками.
Затягивайте гайки только вручную, чтобы избежать чрезмерного сжатия силиконовых прокладок (или резиновых резинок), так как это может привести к снижению демпфирования вибраций и нарушить цель мягкого крепления. Осмотрите резинки, между ними не должно быть видимого зазора, а в идеале ваш полетный контроллер должен иметь небольшой люфт при нажатии. Эта гибкость позволяет резинкам должным образом поглощать вибрации рамы.
Затем установите верхнюю пластину.
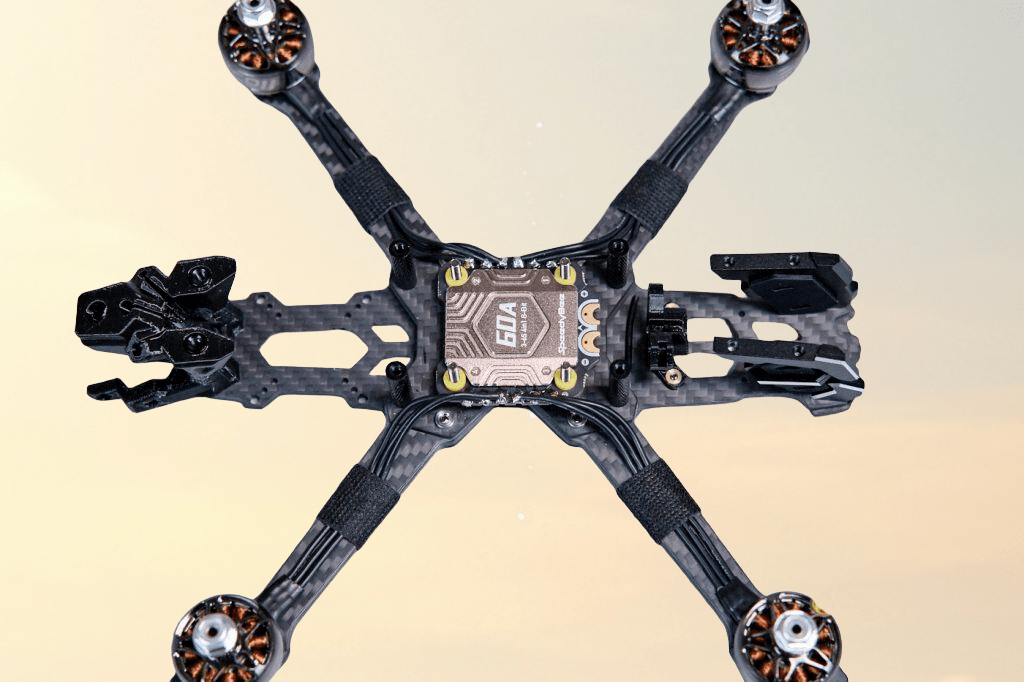
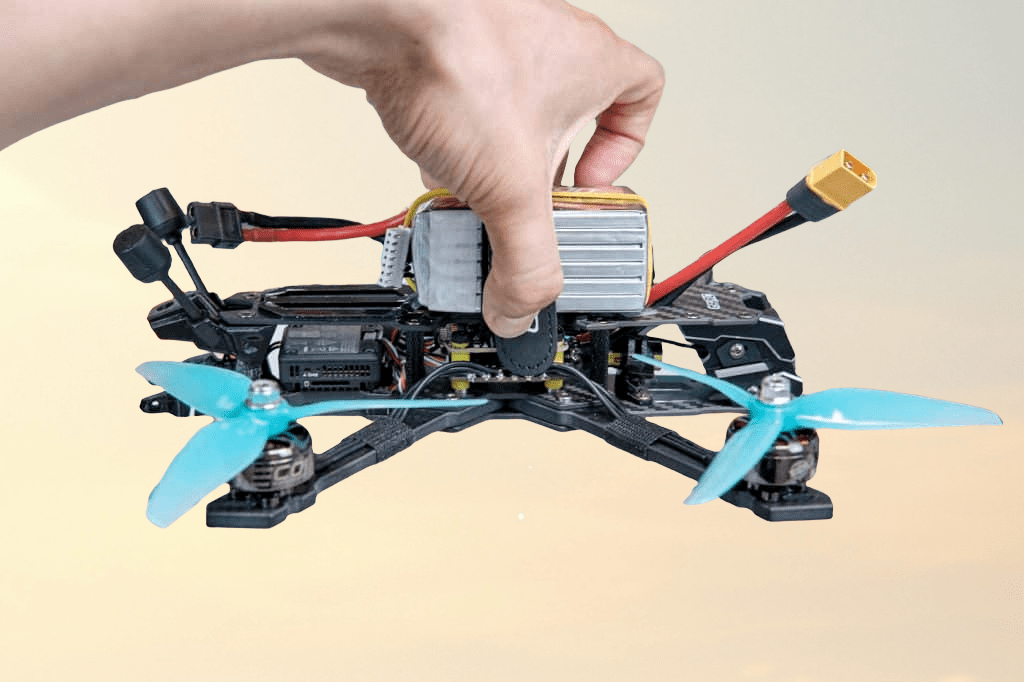
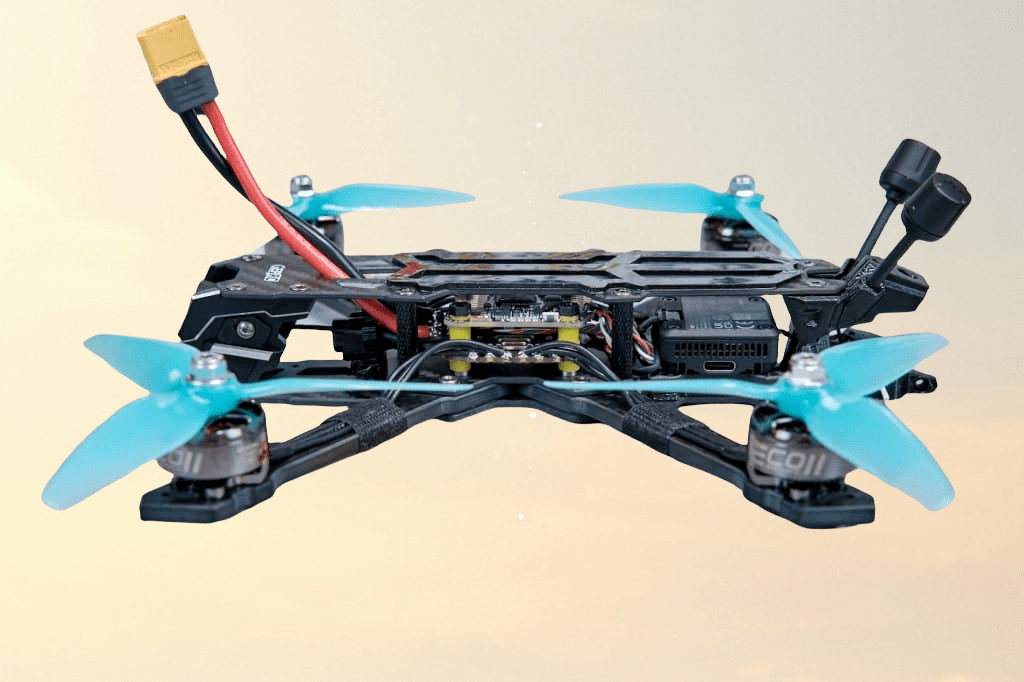
Вот вес готового дрона:
- Дрон с пропеллерами и ремнем для батареи: 453 г
- Дрон + 6S 1100 мАч LiPo: 645 г
- Дрон + 6S 1100 мАч LiPo + GoPro 13: 802 г
При установке пропеллеров обратите внимание на их вращение - по часовой стрелке и против часовой стрелки. Убедитесь, что они установлены на правильные двигатели, иначе ваш квадрокоптер может не взлететь или перевернуться при попытке взлететь.
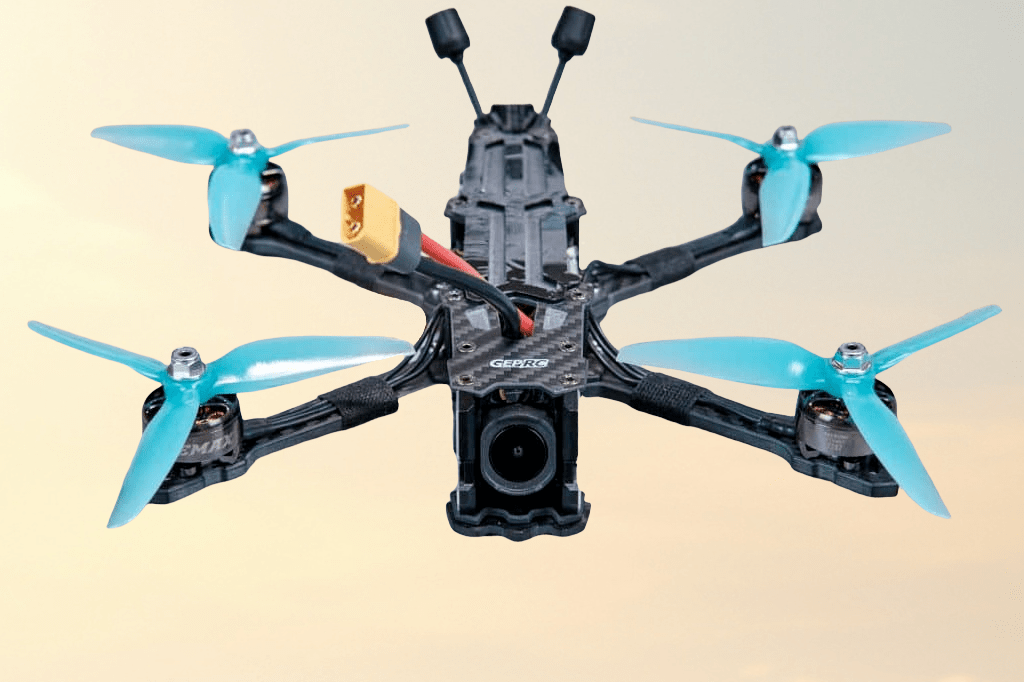
Используйте нейлоновые контргайки M5, чтобы надежно зафиксировать пропеллеры на моторе. Поначалу затяжка может быть сложной, но со временем она станет легче. Избегайте чрезмерной затяжки, чтобы не разбить ступицу пропеллера. Затяните достаточно, чтобы пропеллер не двигался, когда вы пытаетесь повернуть его рукой, держась за колокол мотора.

При установке батареи (и GoPro) убедитесь, что COG (центр тяжести) находится как можно ближе к центру дрона. Чтобы проверить, правильно ли размещена батарея, возьмитесь двумя пальцами за середину верхней пластины и посмотрите, остается ли квадрокоптер в горизонтальном положении. Очень важно, чтобы COG находился в центре четырех моторов. Например, если квадрокоптер перегружен спереди, передние моторы будут работать сильнее, чем задние, пытаясь сохранить его положение, что негативно скажется на летных характеристиках.
И мы готовы к испытательному полету!

9. Настройка Betaflight
Если вы ещё не знакомы с Betaflight, ознакомьтесь с этим руководством: Betaflight Setup.
10. Тюнинг параметров полёта
Необходимо настроить квадрокоптер так, чтобы он летал и вел себя так, как вы хотите. Betaflight, скорее всего, сделате все, чтобы дрон прекрасно летал со стоковыми настройками. Однако если вы серьезно относитесь к производительности, вам нужно знать тонкости! Чаще всего, настройка FPV дрона включает в себя регулировку этих параметров:
- PID регуляторы
- Фильтры
- Рейты
Тюнинг доступен человеку знакомому с техникой и иногда включает в себя использование специальных инструментов. Например, журналов Blackbox. Если вы не знаете, как использовать Blackbox, вот как настроить ваш FPV-беспилотник за 10 простых шагов [готовится].
Если вы знакомы с Blackbox, ознакомьтесь с этим подробным руководством по настройке фильтров и PID [готовится]. Перед настройкой я бы рекомендовал прошить ESC прошивкой Bluejay, если они поставляются с прошивкой BLHeli_S, это обеспечит лучшую производительность (на момент написаниия статьи BLHELI не доступен). При этом вам нужно будет выбрать версию 24kHz или 48kHz. Версия 24 кГц обеспечивает лучшую отзывчивость и крутящий момент, в то время как версия 48 кГц обеспечивает более плавный полет с немного меньшим крутящим моментом. Рекомендуем 48 кГц. Вы также можете включить двунаправленный Dshot и включить фильтр RPM после прошивки Bluejay. Это один из лучших фильтров, доступных в Betaflight, и он делает полет вашего квадрокоптера лучше.
11. Обучение полётам
Если вы новичок в FPV-полётах, вот несколько полезных материалов:
ID 5519