
Обзор контактов полетных контроллеров БПЛА
Для инженеров и разработчиков систем беспилотной авиации
Актуально на 2024 г. | Поддержка: Betaflight 4.4+, INAV 6.0, ArduPilot 4.4, PX4 v1.14
1. Введение: Полётный контроллер как центральный узел БПЛА
Полётный контроллер (Flight Controller, FC) — это вычислительное ядро БПЛА, отвечающее за:
- Сбор данных с датчиков (IMU, GPS, барометр, магнитометр),
- Обработку данных в реальном времени (PID-регулирование, фильтрация, навигация),
- Управление силовой установкой (ESC, сервоприводы),
- Интеграцию с внешними системами (телеметрия, камера, AI-модули).
Современные FC на базе 32-битных ARM Cortex-M4/M7 (STM32F4/F7/H7) поддерживают до 20+ интерфейсов, реализованных на аппаратном уровне с использованием DMA, таймеров, прерываний и протокольных стеков.
 |
 |
2. Техническая спецификация контактов
| Контакт / Группа | Техническое назначение | Особенности | Актуальность | Рекомендации |
|---|---|---|---|---|
| VBAT / PWR | Вход питания от LiPo (2S–6S) | 7–26 В, обратная полярность защищена MOSFET. Требует LC-фильтра. | Критическая | Использовать керамические + танталовые конденсаторы, избегать длинных проводов. |
| 5V / 3.3V | Стабилизированное питание периферии | DC-DC преобразователи с КПД более 90%. Ток: 1–2 А. | Критическая | При нагрузке более 1 А — использовать внешний BEC. Разделять AGND/DGND. |
| M1–M8 (ESC) | Управление электронными регуляторами | Поддержка DShot1200, ProShot1000. Реализация через DMA + таймеры. | Критическая | Короткие провода, избегать параллельности с силовыми линиями. |
| UART (1–6) | Универсальные асинхронные порты | Скорость до 2 Мбит/с, 3.3 В TTL. Поддержка SBUS, GPS, CRSF, MAVLink. | Высокая | Назначать приоритеты. Использовать экранированные кабели. |
| I2C (SDA/SCL) | Подключение датчиков (магнитометр, барометр) | 400 кГц, подтяжка 4.7 кОм. Чувствителен к длине проводов. | Средняя | Длина линии менее 10 см. Использовать I2C-бустеры при необходимости. |
| SPI | Высокоскоростная шина для IMU | До 10 МГц, 4-проводная. Использует DMA. | Высокая | Только для встроенных датчиков. Не рекомендуется для внешних модулей. |
| CAN (FD) | Шина для распределённых систем | До 5 Мбит/с (CAN FD). Требует 120 Ом терминации. | Растущая | Будущее: замена ESC-проводки. Поддержка в ArduPilot, PX4. |
| USB-C | Конфигурация, отладка, OTA | USB 2.0 Full Speed, CDC, DFU. Гальваническая развязка. | Высокая | Реализовывать развязку (например, SN65MLVD200). |
| ADC | Мониторинг VBAT, тока, RSSI | 12-бит, 0–3.3 В. Делители напряжения 10:1. | Средняя | Фильтрация RC-цепочкой (R=1 кОм, C=10 нФ). |
| LED_STRIP | Управление адресными светодиодами (WS2812B) | ШИМ на уровне DMA, тайминги 800 кГц. | Низкая | При более10 диодов — внешнее питание 5 В. |
3. Цифровые протоколы: эволюция и инженерные особенности
3.1. ESC-протоколы: от PWM к цифровым стандартам
| Протокол | Год | Скорость | Задержка | Особенности |
|---|---|---|---|---|
| PWM (50–400 Гц) | 2010 | 500 бод | 2–20 мс | Аналоговый, устарел |
| DShot (150–1200) | 2016 | 1200 кбит/с | 0.83 мс | Цифровой, CRC, телеметрия |
| ProShot | 2020 | 1 Мбит/с | 5.5 мкс | Низкая задержка, без телеметрии |
| Bi-directional DShot | 2021 | 1200 кбит/с | 0.83 мс | Обратная связь RPM, ток, температура |
Инженерное преимущество: DShot позволяет реализовать RPM-фильтрацию (anti-torque, desync detection) и динамическую балансировку винтов.
3.2. Телеметрические протоколы
| Протокол | Применение | Задержка | Дальность | Особенности |
|---|---|---|---|---|
| MAVLink 2.0 | Используется для телеметрии и обмена управляющими командами между полетным контроллером (например, ArduPilot, PX4) и наземной станцией (Ground Control Station). Применяется в промышленных, исследовательских и FPV-дронах для получения структурированных данных: параметры полета, навигация, управление миссией, связь с периферией. Идеален для автономных и полуавтономных платформ с большими возможностями управления и мониторинга. | 10–50 мс | 10+ км | Структурированные пакеты, криптозащита |
| CRSF (Crossfire) | Протокол низкой задержки для управления дроном (радиоуправление) от TBS (Team BlackSheep). Поддерживается в Betaflight, INAV, ArduPilot (через соответствующий приемник). Позволяет не только отдавать команды, но и получать обратную телеметрию (напряжение, RSSI, координаты спутников). | 4 мс | 10–20 км | 150 Гц update, шифрование |
| Ghost | Протокол ImmersionRC для радиоуправления и телеметрии, популярный у FPV-пилотов и гонщиков. Разработан для низкой задержки и устойчивости к помехам в 2.4 ГГц. Используется с соответствующими передатчиками и приемниками серии Ghost, в первую очередь — в дронах для гонок и дальнобойных полетов. | 8 мс | 15 км | LBT, устойчивость к помехам |
| ELRS (ExpressLRS) | Открытое решение для радиоуправления и телеметрии, приоритет — низкая задержка и высокая гибкость. Подходит для FPV-дронов любого формата: от лонг-рейндж (long-range) до микродронов и 3D самолетов. Быстро развивается, поддерживается множеством аппаратуры, обеспечивает возможности обновлений "по воздуху". Используется энтузиастами DIY и профессиональными пилотами. | 4–15 мс | 15+ км | 2.4 ГГц, FHSS, OTA-обновления |
Trend: переход на широкополосные модуляции (LoRa, FHSS) и многоканальную передачу.
4. Интеграция с AI и нейросетевыми системами
4.1. Новые интерфейсы для бортового ИИ
Современные FC (например, Holybro Durandal H7, CUAV v5+) поддерживают:
- MIPI-CSI — подключение камер (1–2 потока HD/4K)
- USB Host — подключение
Jetson Nano,Coral TPU - Ethernet (RMII) — для SLAM, LiDAR, 5G-модемов
4.2. Поддержка on-board AI
- TensorFlow Lite Micro на Cortex-M7
- CMSIS-NN для оптимизации нейросетей
- Возможность реализации:
- Обнаружение препятствий
- Распознавание объектов
- Автономная посадка
Пример: FC + Raspberry Pi + OpenMV → обход препятствий без GPS.
5. Эволюция интерфейсов: хронология и прогноз
| Период | Ключевые изменения | ПО / Платформы |
|---|---|---|
| 2010–2013 | PWM, PPM, отсутствие стабилизаторов | ArduPilot, MultiWii |
| 2014–2016 | SBUS, I2C, UART, 5V BEC | Betaflight 1.0, INAV |
| 2017–2019 | DShot, OSD, VTX control | Betaflight 3.0–3.5 |
| 2020–2023 | CAN, WiFi/BT, AI-интерфейсы | BF 4.2–4.4, ArduPilot 4.3 |
| 2024+ | CAN FD, 5G, SLAM, OTA, USB-C PD | BF 4.5+, PX4 v2.0 |
6. Практические рекомендации для инженеров
6.1. Проблемы питания
- Перегрузка 5 В линии (подключение камеры, VTX, GPS)
- Отсутствие разделения AGND/DGND
- Пульсации VBAT от ESC
Решение: использовать внешние BEC, ферритовые кольца, LC-фильтры.
6.2. Помехи в линиях данных
- Самопроизвольные срабатывания
- Потеря GPS-фикса
- Сбои в SBUS
Решение: твистинг пар, экранированные кабели, избегать прокладки рядом с ESC.
7. Будущие тренды (2024–2027)
| Тренд | Описание | Инженерное значение |
|---|---|---|
| CAN вместо PWM | Цифровая шина управления ESC | Снижение количества проводов, телеметрия |
| USB-C с Power Delivery | Унифицированный интерфейс питания и данных | Упрощение подключения, OTA-обновления |
| 5G/4G модемы | Удалённое управление, стриминг | Для промышленных БПЛА |
| Оптоволоконные интерфейсы | Высокая помехоустойчивость | Для критичных систем (военные, медицинские) |
| Беспроводная зарядка | Индукционные пластины | Для автономных дронов-чарджеров |
Заключение: ключевые выводы для разработчиков
- Переход от аналоговых к цифровым интерфейсам — неизбежен. DShot, CAN, CRSF становятся стандартом.
- Питание — критическая зона: необходимо проектировать с запасом и фильтрацией.
- Интеграция AI — новое направление: MIPI-CSI, USB Host, Ethernet — обязательны в премиальных FC.
- CAN-шина — будущее управления ESC и периферией.
- USB-C — становится универсальным портом для конфигурации, питания и данных.
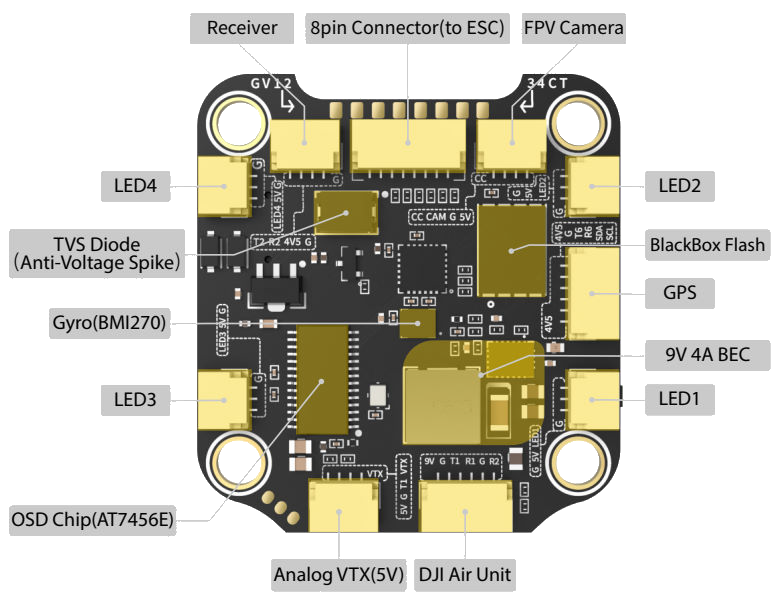
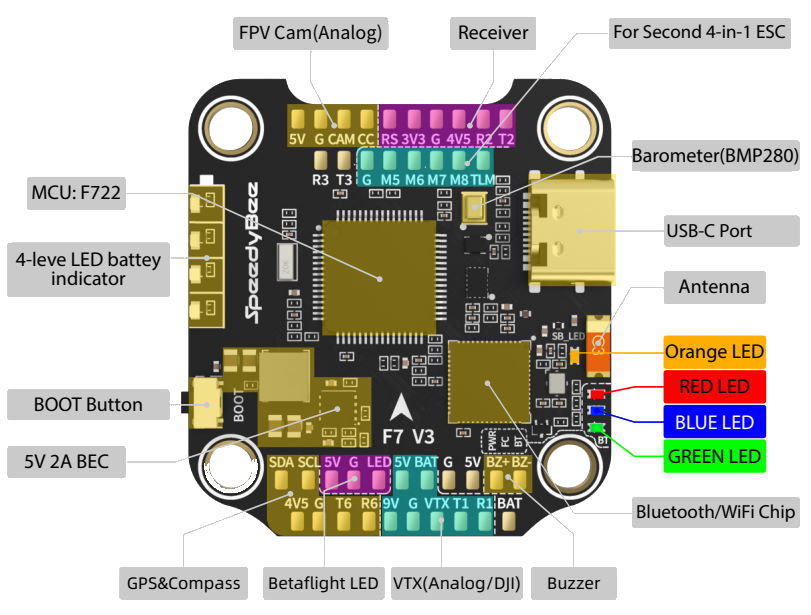
Пример обзора контактов полетного контроллера Airbot Fenix Super F4
- Пятница, 24 октября 2025