

")
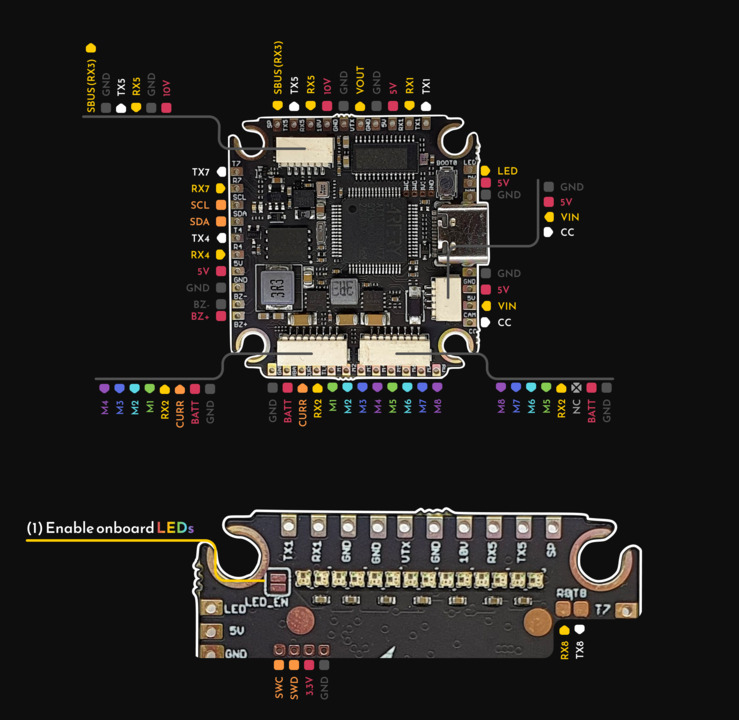
Пример распиновки контроллера (Airbot Fenix Super F4)
Общие характеристики
| Target: | AIRBOTSUPERF4 |
| MCU: | AT32F435 |
| IMU: | ICM42688P |
| OSD: | MAX7456 |
| Baro: | DPS310 |
| Blackbox: | 16MB |
| Measurements: | Size: 36x39mm |
| Mounting: 30.5x30.5mm | Weight: 7.8g |
| Характеристика | Значение | Примечание |
|---|---|---|
| Слот для SD-карты | Отсутствует | Нет возможности расширения памяти через SD |
| Встроенный приёмник | Нет | Требуется внешний RX |
| Аппаратный инвертер | Да | Поддержка инвертированных сигналов (например, SBUS/F.Port) |
| Bluetooth | Нет | — |
| Wi-Fi | Нет | — |
| Встроенные RGB-светодиоды | 28 шт. | Управляемая подсветка |
Эти характеристики определяют базовую функциональность контроллера: он ориентирован на использование в дроне без встроенного приёмника и беспроводных интерфейсов, но с поддержкой инвертированных протоколов и визуальной индикации через RGB-подсветку.
Ввод/вывод
| Интерфейс / Питание | Количество / Тип | Примечание |
|---|---|---|
| USB | Type-C | Для прошивки и питания |
| Выходы моторов (ESC) | 8 | Поддержка октокоптера или 8 моторов |
| UART | 8 | Гибкая маршрутизация сигналов |
| I²C | Да | Для подключения датчиков и периферии |
| SWD | Да | Для отладки и программирования через JTAG/SWD |
| SPI | Нет (только в dev-версиях) | Не доступен в стандартной версии |
| Выход 3.3 В | Да | Для питания логики и датчиков |
| Выход 4.5 В (VBUS) | Да | Напряжение с USB |
| Выход 5 В | 3 А | Для питания периферии (камера, VTX и др.) |
| Выход 10 В | 3 А | Для аналоговых VTX |
| Датчик тока | Да | Встроенный измеритель тока |
| Аналоговый RSSI | Нет | RSSI должен передаваться цифровым способом |
| Выход для LED-ленты | Да | Поддержка адресуемых лент (например, WS2812) |
| Выход для зуммера | Да | Активный или пассивный зуммер |
Набор интерфейсов позволяет подключать широкий спектр периферии: от моторов и видеопередатчиков до датчиков и индикаторов. Отсутствие SPI ограничивает использование некоторых типов внешней памяти или дисплеев, но компенсируется большим количеством UART и I²C.
UART-порты
| UART | Пины | Примечание |
|---|---|---|
| 1 | TX1 / RX1 | Общий UART |
| 2 | RX2 | Используется для телеметрии ESC |
| 3 | TX3 / RX3 | Инвертирован — подходит для SBUS/F.Port |
| 4 | TX4 / RX4 | Общий UART |
| 5 | TX5 / RX5 | Общий UART |
| 7 | TX7 / RX7 | Общий UART |
| 8 | TX8 / RX8 | Маленькие контактные площадки на обратной стороне платы |
UART-порты позволяют подключать приёмник (SBUS/F.Port на UART3), телеметрию ESC (UART2), GPS, OSD, цифровой VTX (UART5), а также использовать оставшиеся порты для дополнительных модулей или отладки.
Питание (контактные площадки)
| Напряжение | Метка | Кол-во | Примечание |
|---|---|---|---|
3.3 В |
— | 1 | Доступно в разъёме SWD |
5 В |
5V | 3 | Для питания периферии |
10 В |
10V | 1 | Для аналоговых VTX |
| Напряжение аккумулятора | VBAT | 1 | Измерение напряжения батареи |
Эти выводы используются для разводки питания на внешние компоненты: камеры (5 В), аналоговые видеопередатчики (10 В), а также для мониторинга напряжения аккумулятора и питания логических схем (3.3 В).
Сигналы ESC (моторы)
| Сигнал | Метка | Примечание |
|---|---|---|
| Ток | CURR | Вход для измерения тока |
| M1–M8 | M1–M8 | ШИМ-сигналы для управления моторами |
Эти сигналы управляют скоростью вращения моторов через ESC и позволяют контроллеру получать данные о потребляемом токе для телеметрии и защиты от перегрузок.
Аналоговое видео
| Сигнал | Метка | Примечание |
|---|---|---|
| Видеовход | CAM | От камеры |
| Управление камерой | CC | Контроль экспозиции/режимов |
| Видеовыход | VTX | На передатчик видео |
Этот интерфейс предназначен для подключения аналоговой FPV-камеры и передачи видео на аналоговый видеопередатчик (VTX), что типично для гоночных и фристайловых дронов.
Зуммер
| Сигнал | Метка | Примечание |
|---|---|---|
| Плюс | BZ+ | Положительный вывод |
| Минус | BZ− | Отрицательный вывод |
Зуммер используется для звуковой индикации состояния дрона: например, при армировании, потере сигнала или низком заряде батареи.
RGB-светодиоды
| Сигнал | Метка | Кол-во | Примечание |
|---|---|---|---|
| Данные | LED | 1 | Управление цепочкой светодиодов |
| Включение | LED_EN | 1 | Перемычка для активации встроенных LED |
Встроенные RGB-светодиоды могут использоваться для визуального отображения режимов полёта, состояния связи, уровня заряда или просто для стилизации дрона.
USB Breakout
| Сигнал | Метка | Примечание |
|---|---|---|
| Земля | GND | Общий провод |
| Питание USB | VBUS | 4.5–5 В от USB |
| Данные − | DN | USB D− |
| Данные + | DP | USB D+ |
Эти выводы позволяют подключать контроллер к ПК для прошивки, настройки или диагностики, а также использовать USB-питание при наземной отладке.
I²C
| Сигнал | Метка | Примечание |
|---|---|---|
| Тактовый | SCL | Шина I²C — такт |
| Данные | SDA | Шина I²C — данные |
I²C используется для подключения внешних датчиков (например, барометра, магнитометра) или периферии с низкой скоростью обмена данными, таких как OLED-дисплеи.
SWD (Serial Wire Debug)
| Сигнал | Метка | Примечание |
|---|---|---|
| SWC | SWC | Тактовый сигнал отладчика |
| SWD | SWD | Данные отладчика |
| 3.3 В | — | Питание для отладчика |
| Земля | GND | Общий провод |
Разъём SWD предназначен для подключения отладчика (например, ST-Link или J-Link) с целью прошивки, отладки кода или восстановления контроллера в случае сбоя.
Разъёмы
ESC 1–4
| Пин | Сигнал | Метка |
|---|---|---|
| 1 | Земля | GND |
| 2 | Напряжение аккумулятора | VBAT |
| 3 | Ток | CURR |
| 4 | Телеметрия ESC | RX2 |
| 5 | Сигнал 1 | M1 |
| 6 | Сигнал 2 | M2 |
| 7 | Сигнал 3 | M3 |
| 8 | Сигнал 4 | M4 |
Этот разъём объединяет питание, управление и телеметрию для первых четырёх моторов, упрощая подключение 4-in-1 ESC-платы в квадрокоптерах или половине моторов в октокоптере.
ESC 5–8
| Пин | Сигнал | Метка |
|---|---|---|
| 1 | Земля | GND |
| 2 | Напряжение аккумулятора | VBAT |
| 3 | Телеметрия ESC | RX2 |
| 4 | Сигнал 5 | M5 |
| 5 | Сигнал 6 | M6 |
| 6 | Сигнал 7 | M7 |
| 7 | Сигнал 8 | M8 |
Аналогично первому разъёму, используется для подключения второй половины моторов в октокоптере или резервных ESC в специализированных конфигурациях.
Камера
| Пин | Сигнал | Метка |
|---|---|---|
| 1 | Земля | GND |
| 2 | 5 В | 5V |
| 3 | Видеовход | CAM |
| 4 | Управление камерой | CC |
Разъём камеры предназначен для подключения аналоговой FPV-камеры с возможностью программного управления её настройками (например, переключение режимов день/ночь).
Цифровой VTX
| Пин | Сигнал | Метка |
|---|---|---|
| 1 | 10 В | 10V |
| 2 | Земля | GND |
| 3 | TX UART5 | TX5 |
| 4 | RX UART5 | RX5 |
| 5 | Земля | GND |
| 6 | SBUS (инверт.) | RX3 |
Разъём цифрового VTX предназначен для подключения современных цифровых видеопередатчиков (например, DJI Digital FPV или Walksnail), поддерживающих двунаправленную связь и управление через UART, а также резервный SBUS-вход для совместимости с аналоговыми системами.