")
Инструкция по сборке VTOL HeeWing T1 (1 часть)
Полное пошаговое руководство по модификации и сборке самолета HeeWing T1 в конфигурации VTOL (вертикального взлета и посадки)
Примечание: После сборки необходимо провести настройку и калибровку полетного контроллера перед первым полетом.
Необходимые компоненты
Основные компоненты
- Планер HeeWing T1 PNP
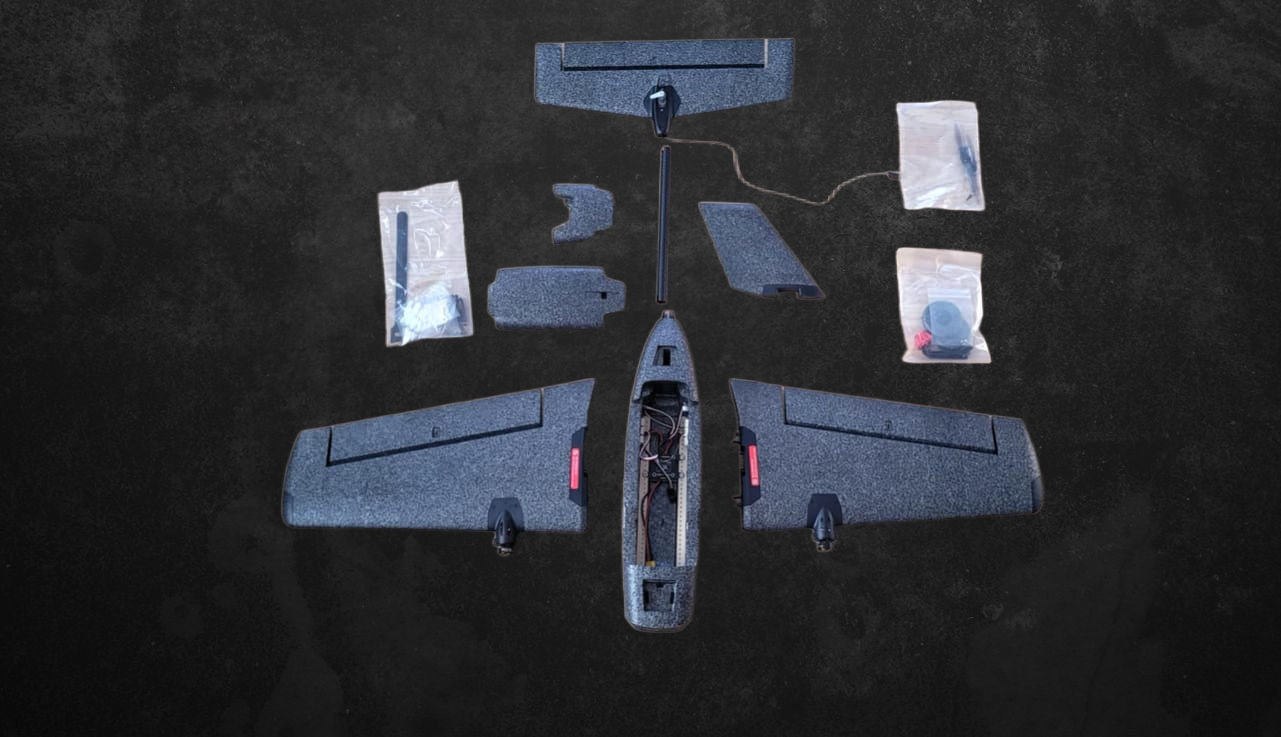
- Комплект VTOL Conversion Kit

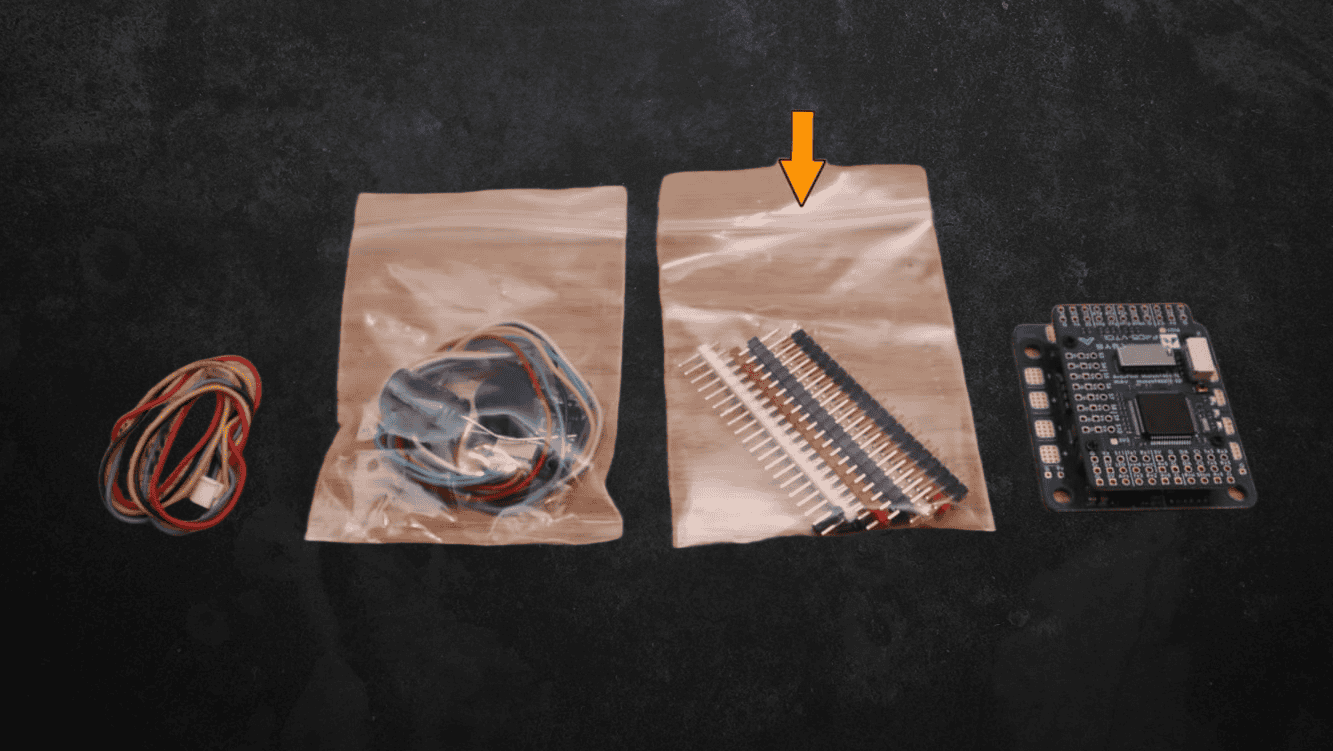
Электроника

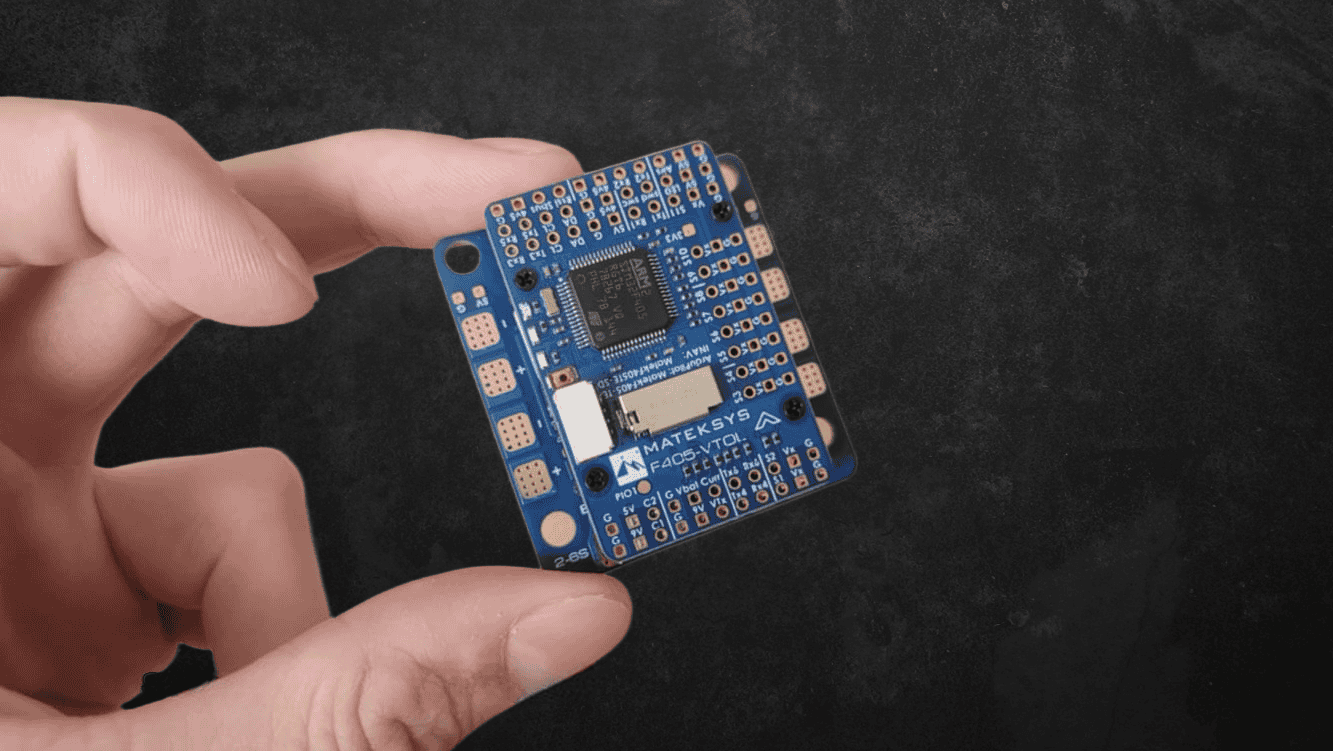
- Полетный контроллер Matek F405-VTOL
- Видеопередатчик TBS Unify Pro Race 2
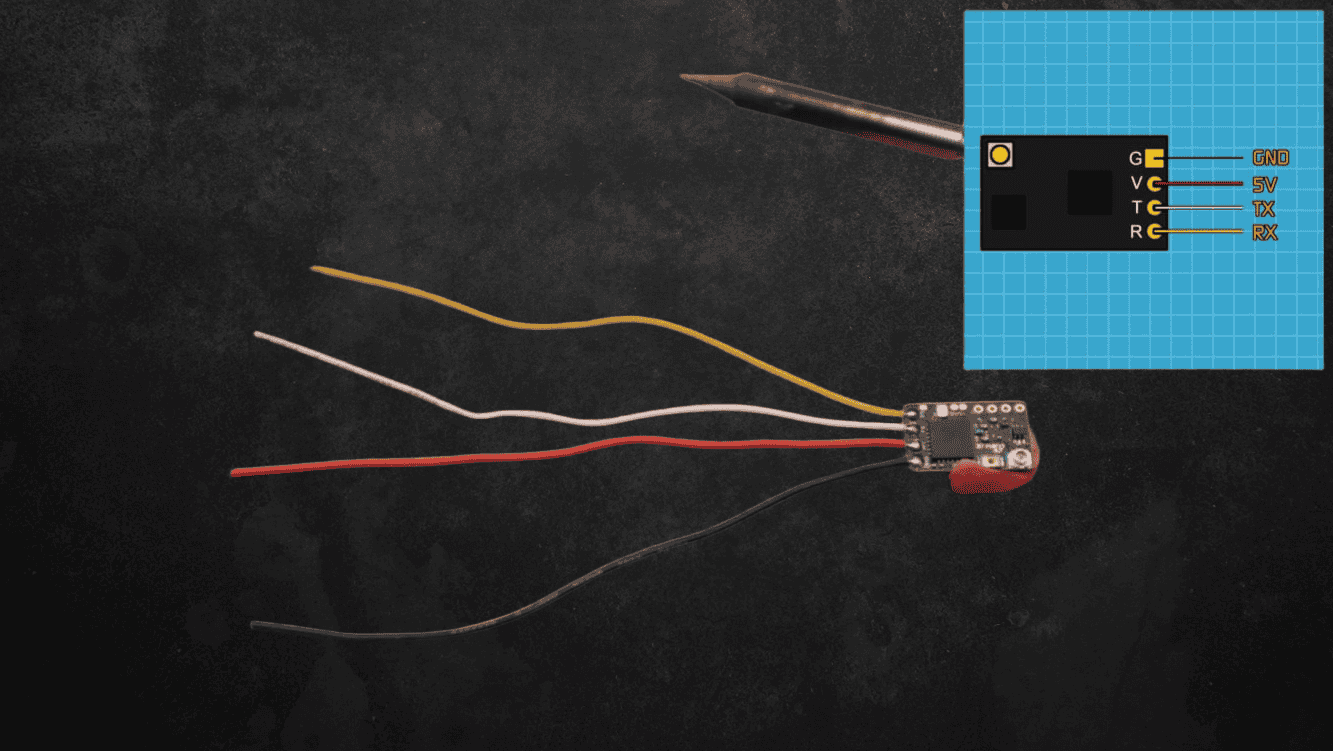
- Приемник TBS Crossfire Nano SE
- Камера Runcam Phoenix 2 Nano
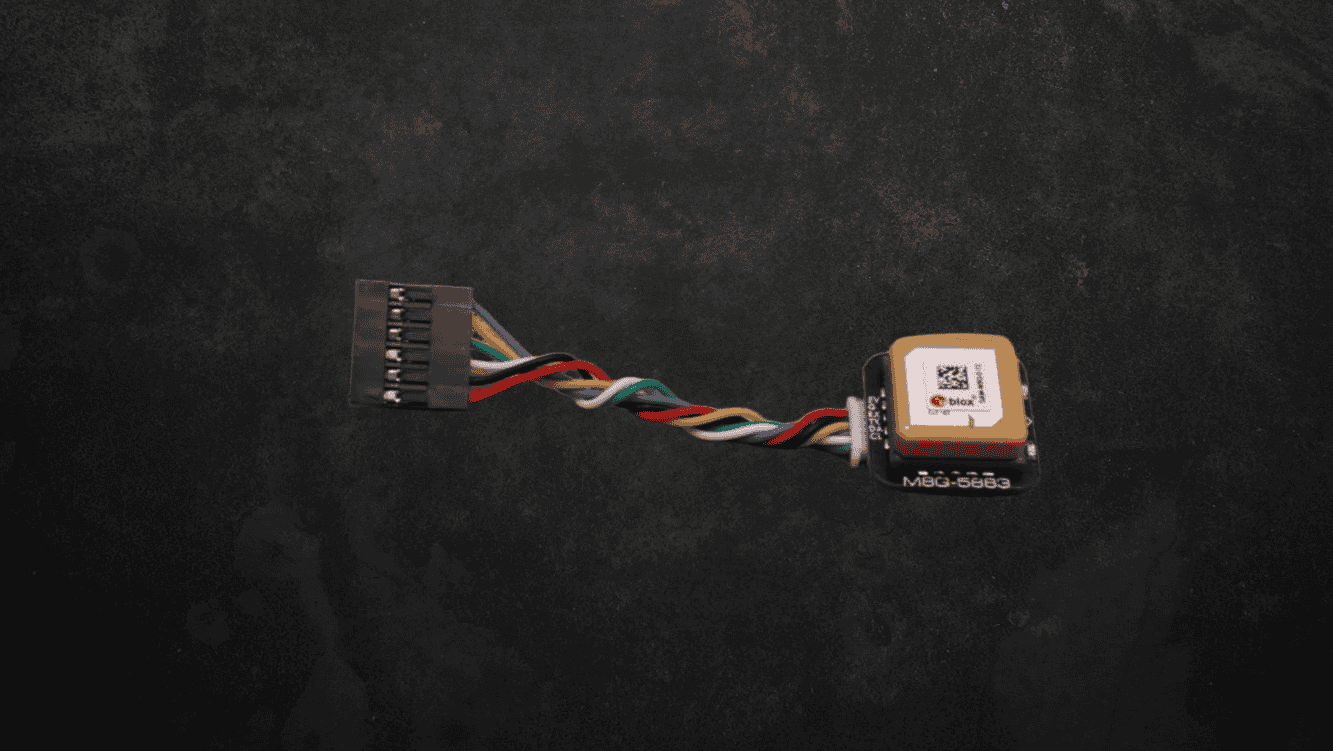
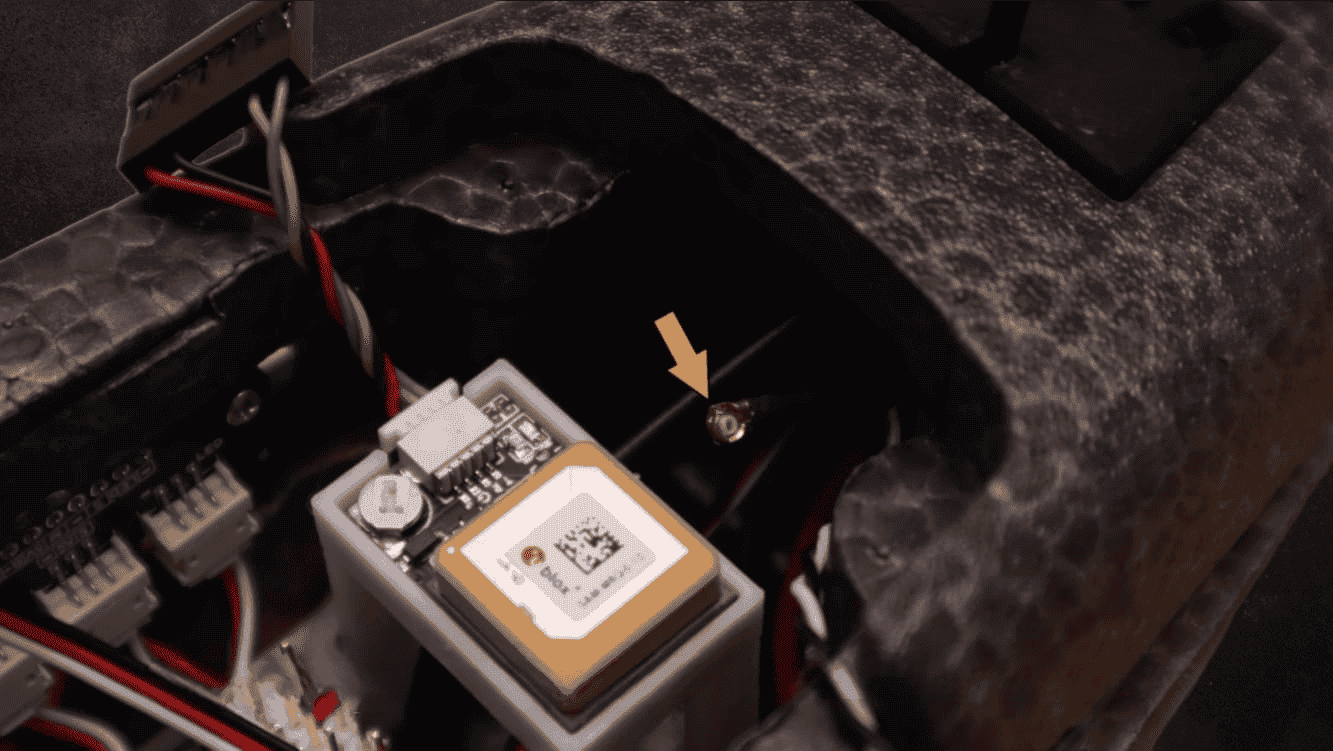
- GPS-модуль Matek M8Q-5883
- Антенна TrueRC Singularity MMCX 90 RHCP
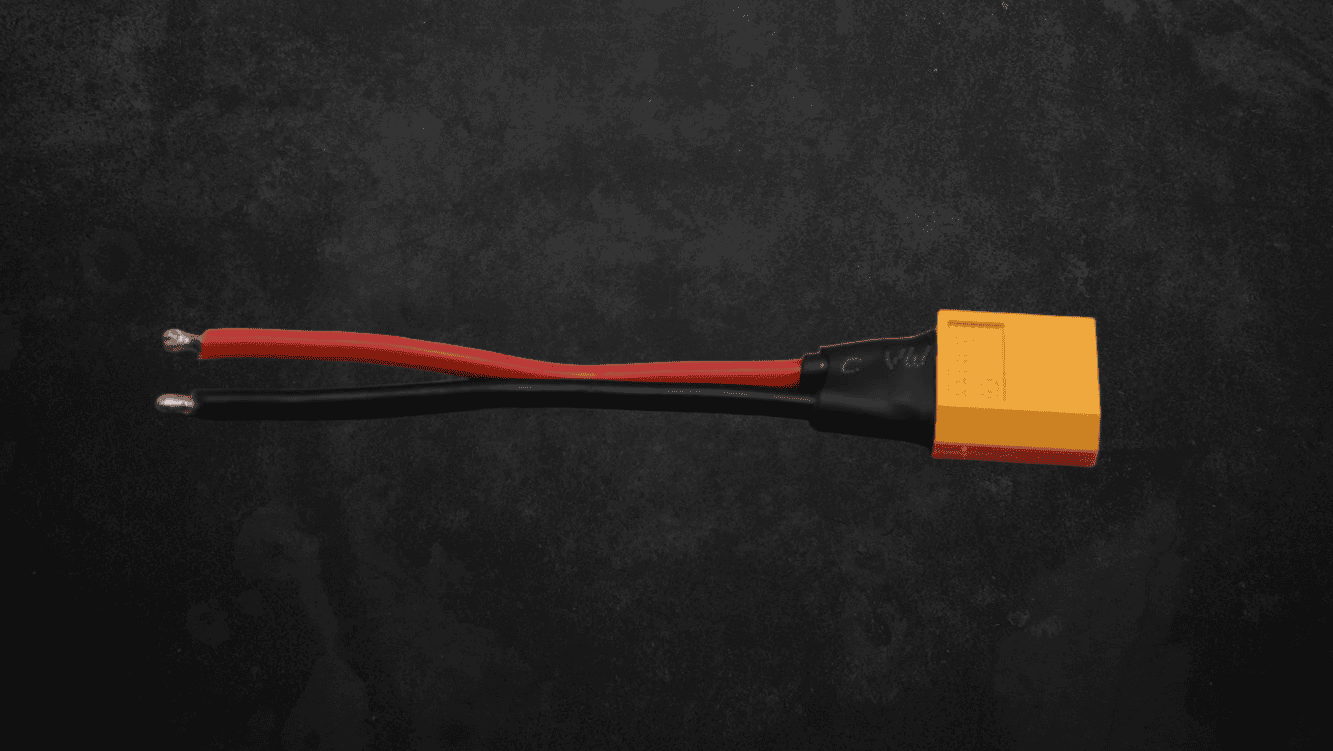
- Силовой разъем XT60
- Радиатор 25х25мм
- Провода 20AWG 30см (красный, черный)
Дополнительные материалы
- 3D-печатные детали thingiverse
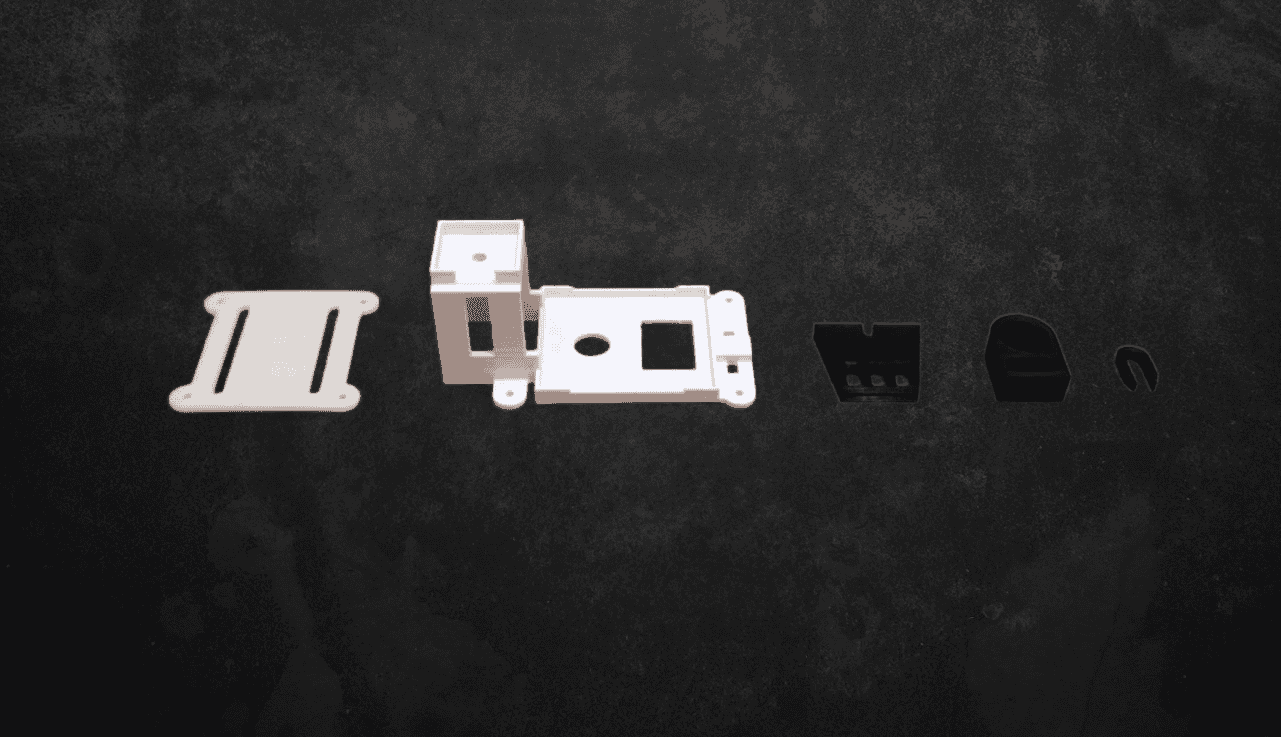
- Термолента, монтажная лента
- Клей UHU POR
- Термоусадка
- Коннекторы

Этап 1: Модификация крыльев и установка tilt-сервомеханизмов
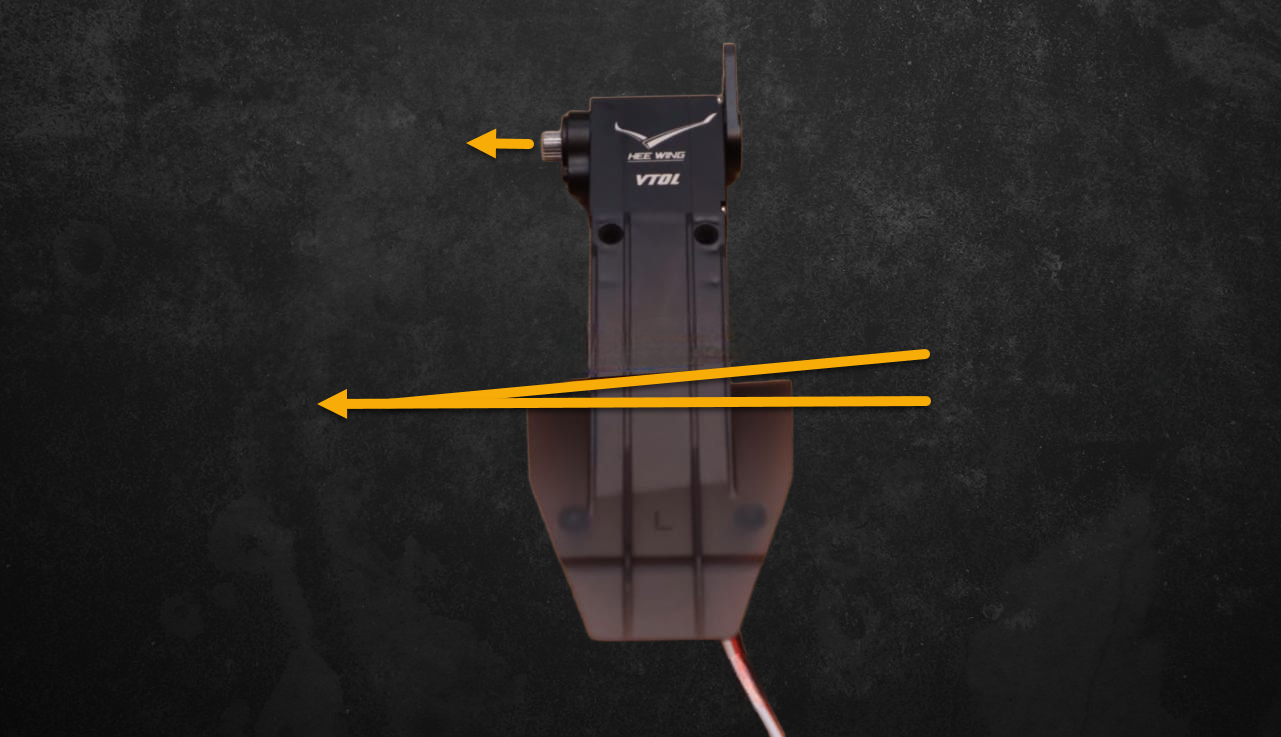
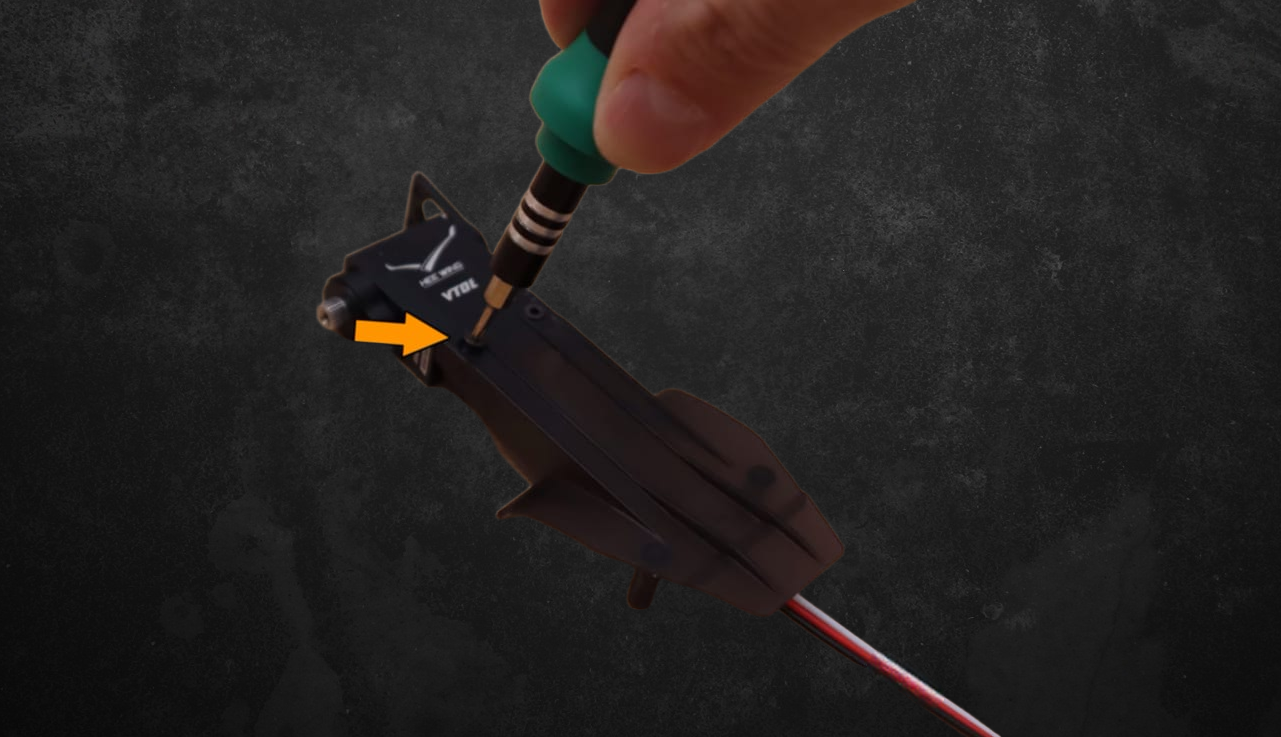
- Начните с левого крыла. На нем есть маркировка «L».
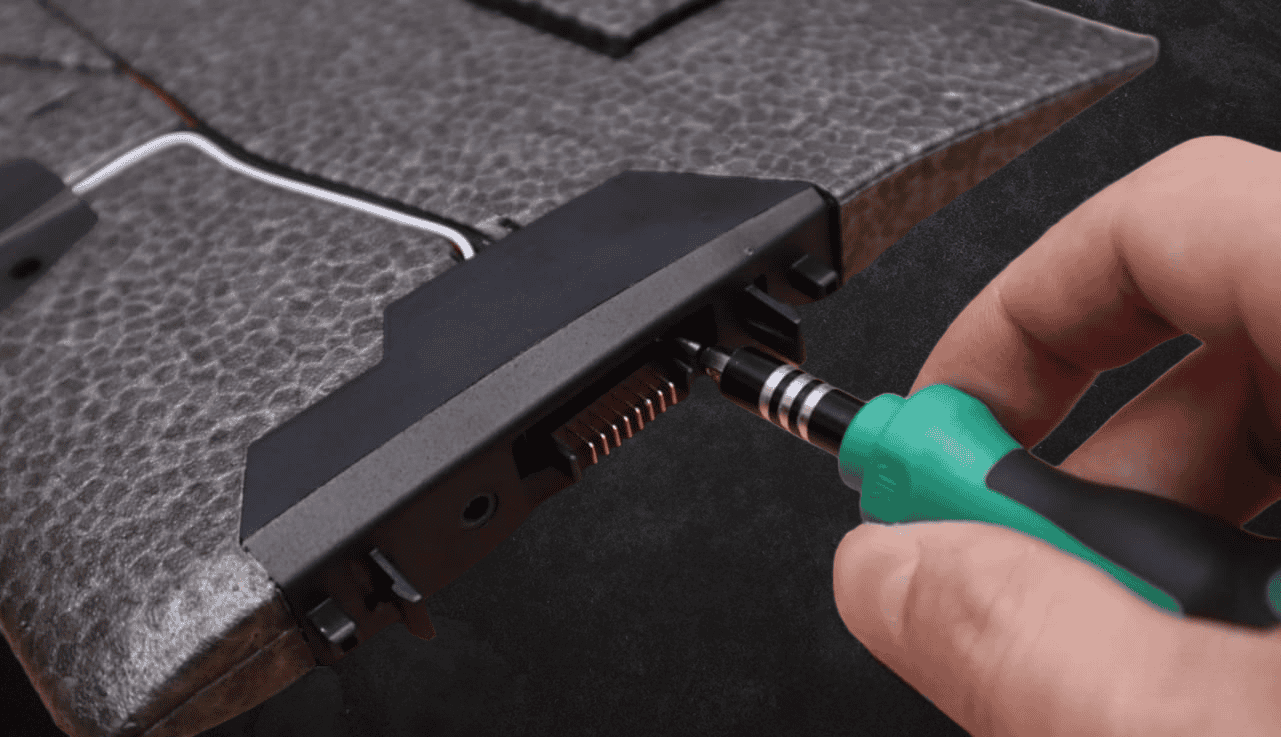
- Снимите 4 винта с мотогондолы.
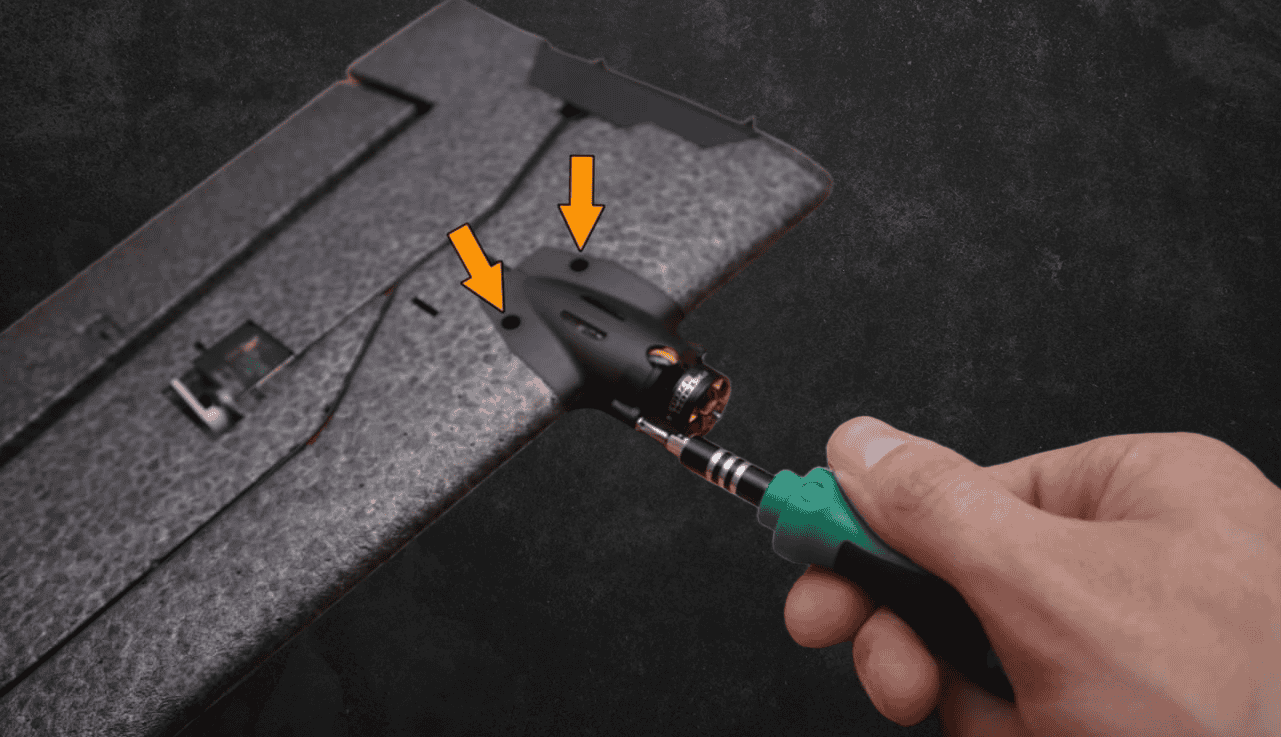
Снимите первую половину гондолы, затем переверните крыло и снимите вторую половину.
 |
 |
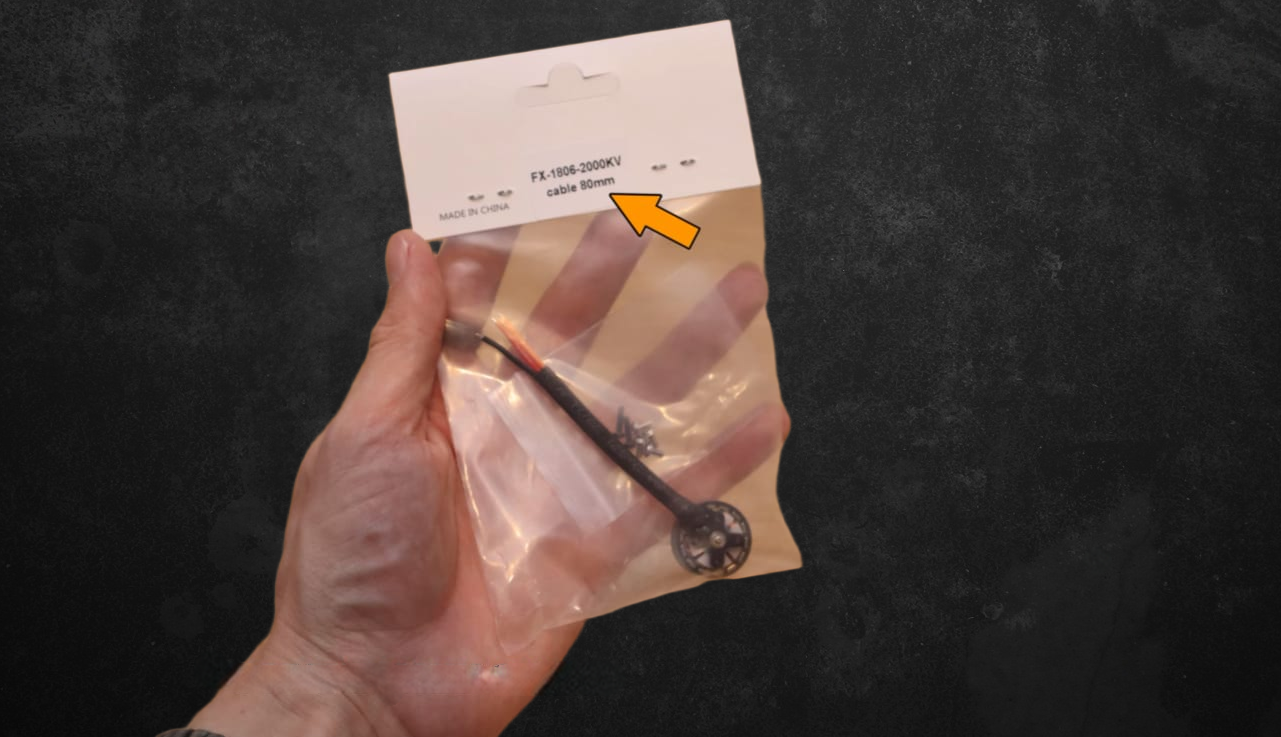
- Отпаяйте старый мотор от ESC (порядок проводов не важен). Старую мотогондолу можно убрать.

- Возьмите новый мотор из VTOL-комплекта и припаяйте его к ESC (порядок проводов не важен).
 |
 |
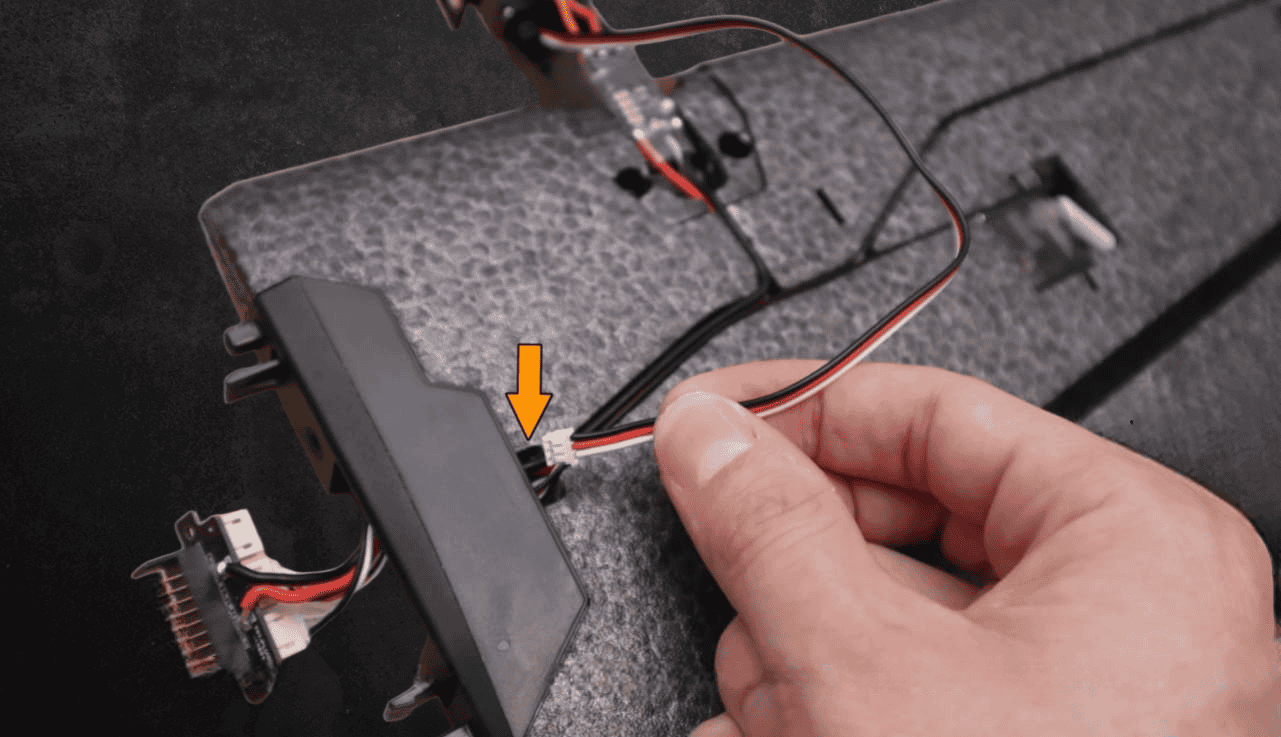
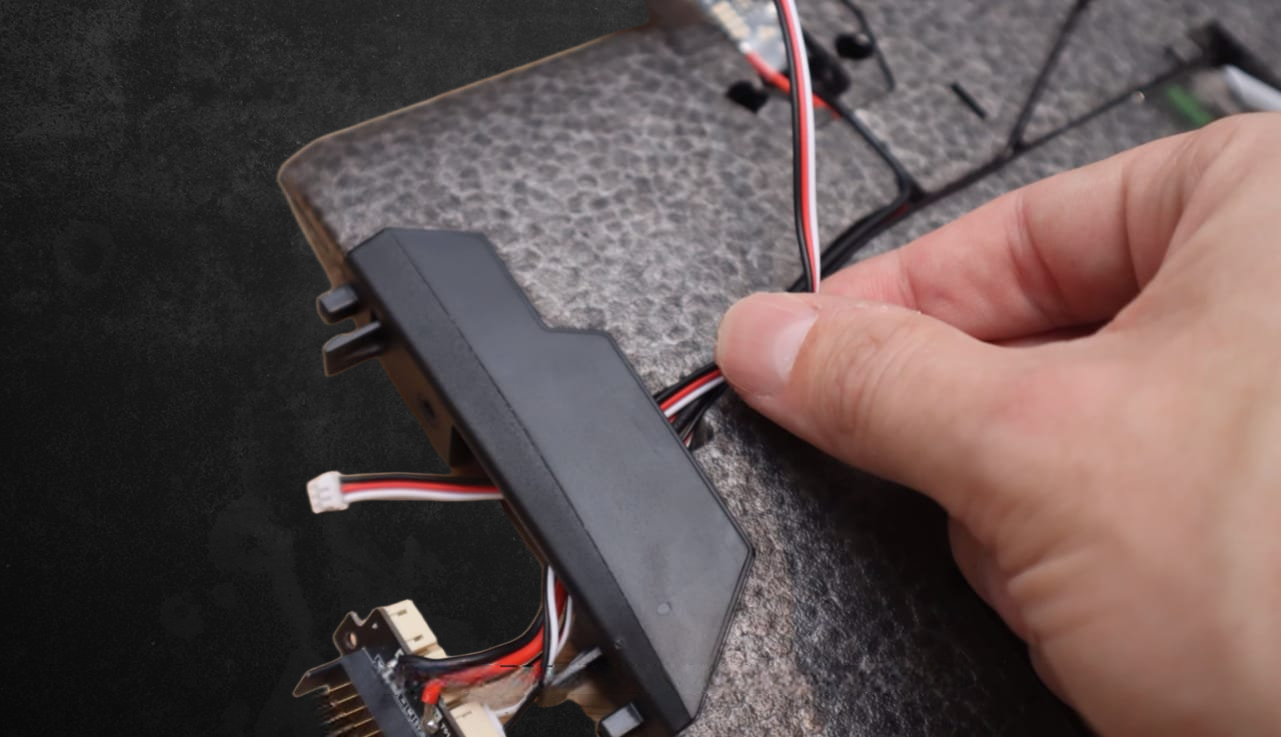
- Снимите 2 винта, удерживающие быстросъемный коннектор в крыле, и аккуратно извлеките его.
 |
 |
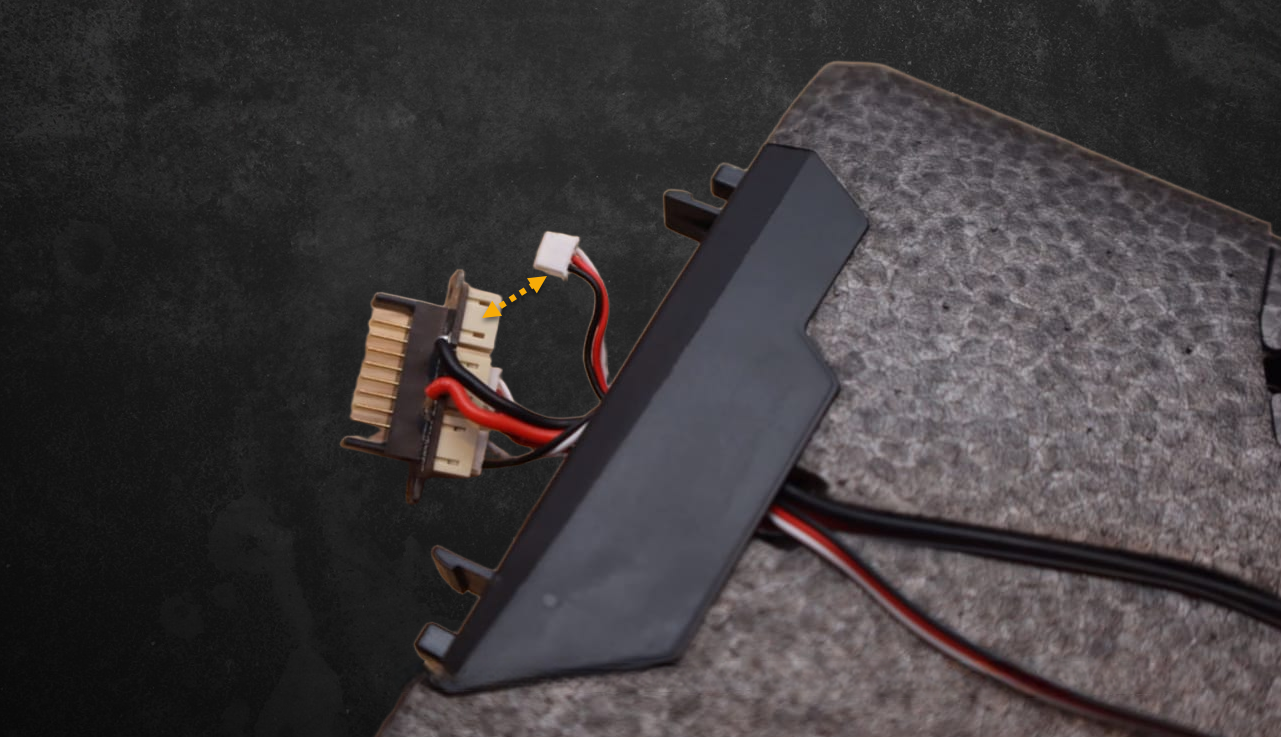
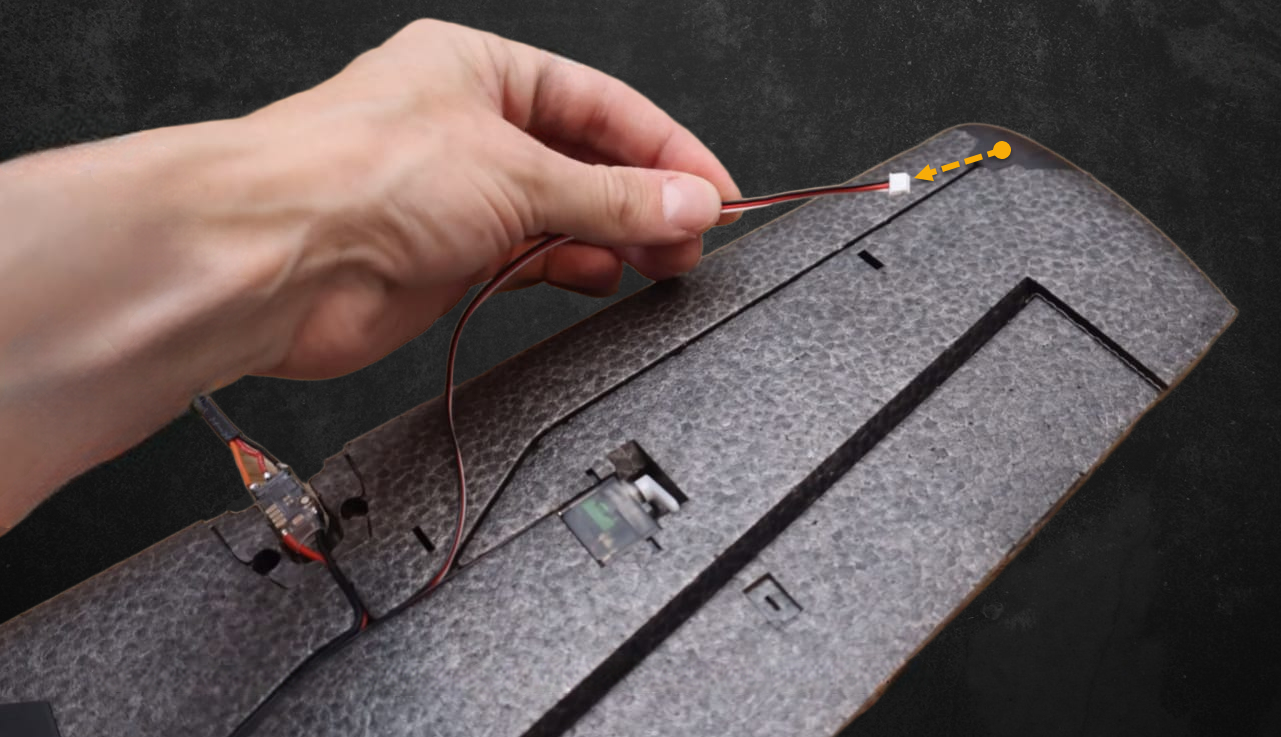
- Отсоедините провод LED от быстросъемного коннектора, а затем от самого светодиода. Полностью извлеките провод из крыла, но сохраните его для дальнейшего использования.
 |
 |
- Возьмите комплект tilt-сервопривода и комплект креплений двигателя из VTOL-набора.
 |
 |
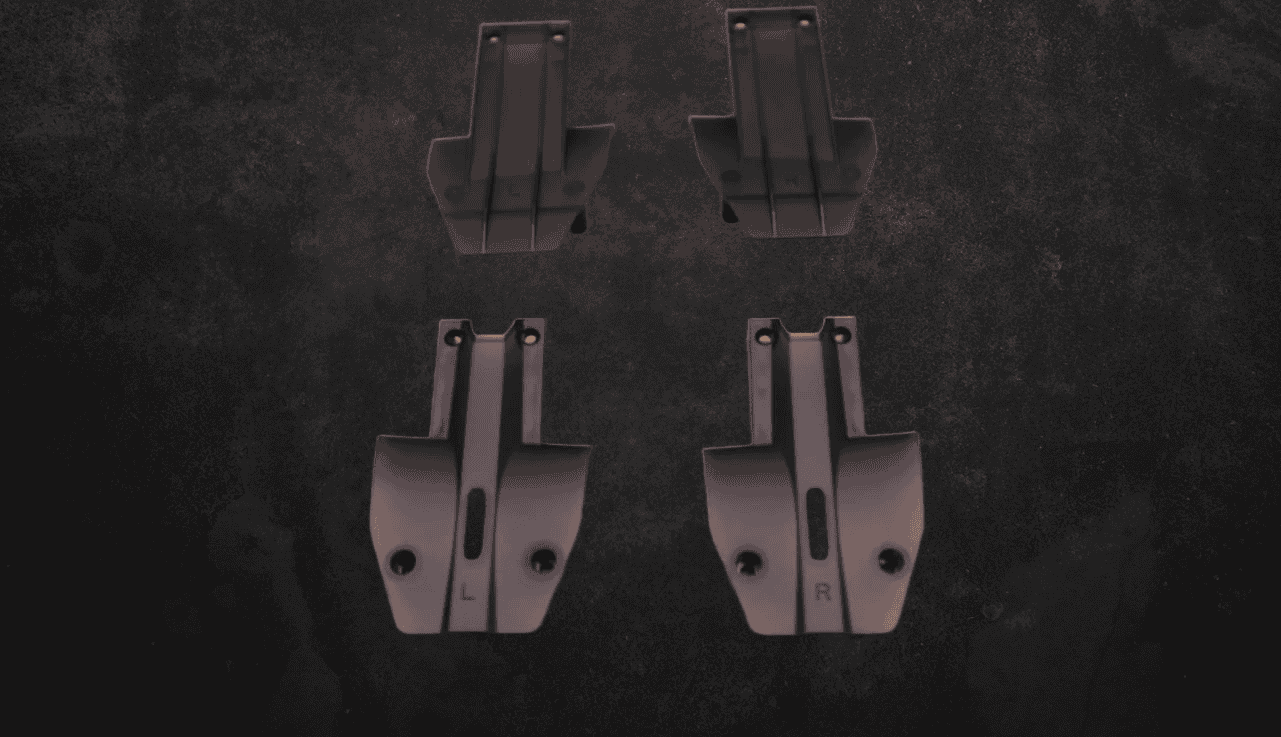
- Найдите верхнюю левую крышку гондолы (с маркировкой «L» и без отверстия). Установите в нее tilt-сервопривод.
 |
 |
- Ориентируйте сервопривод так, чтобы его шестерня была направлена в сторону скосного края крышки.
 |
 |
- Используйте 2 черных винта из комплекта креплений, чтобы закрепить сервопривод в гондоле.
 |
 |
- Установите собранную гондолу на верхнюю часть крыла.
 |
 |
- Проденьте провод tilt-сервопривода через отверстие в крыле к быстросъемному коннектору.
 |
 |
- Подключите провод сервопривода к разъему, обозначенному «LED» (который вы освободили на шаге 7).
 |
 |
- Найдите нижнюю левую крышку гондолы (с маркировкой «L» и с отверстием). Установите ее на нижнюю часть крыла, пропустив провода мотора через отверстие.
 |
 |
 |
- Используйте 2 серебряных винта (из комплекта креплений), чтобы прикрепить гондолу к крылу. Не затягивайте их слишком сильно.
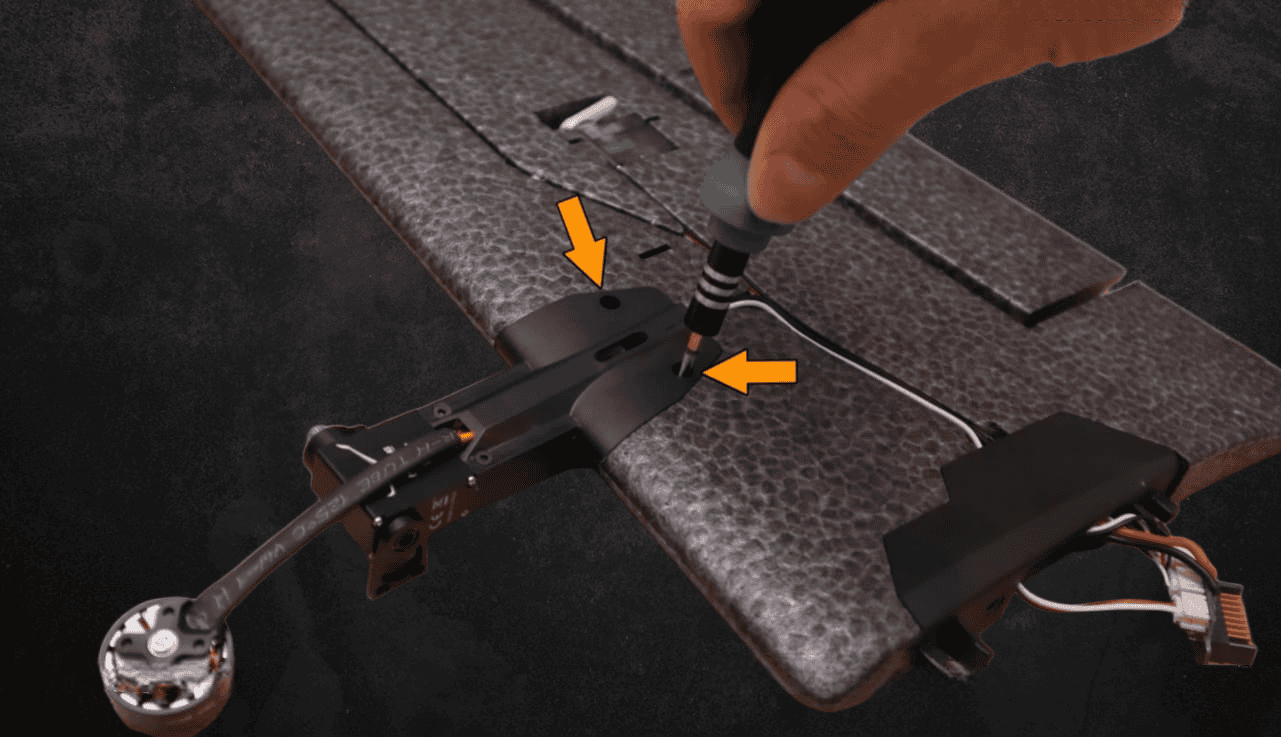
- Аккуратно вставьте быстросъемный коннектор обратно в крыло, стараясь не передавить провода, и закрепите его двумя оригинальными винтами.

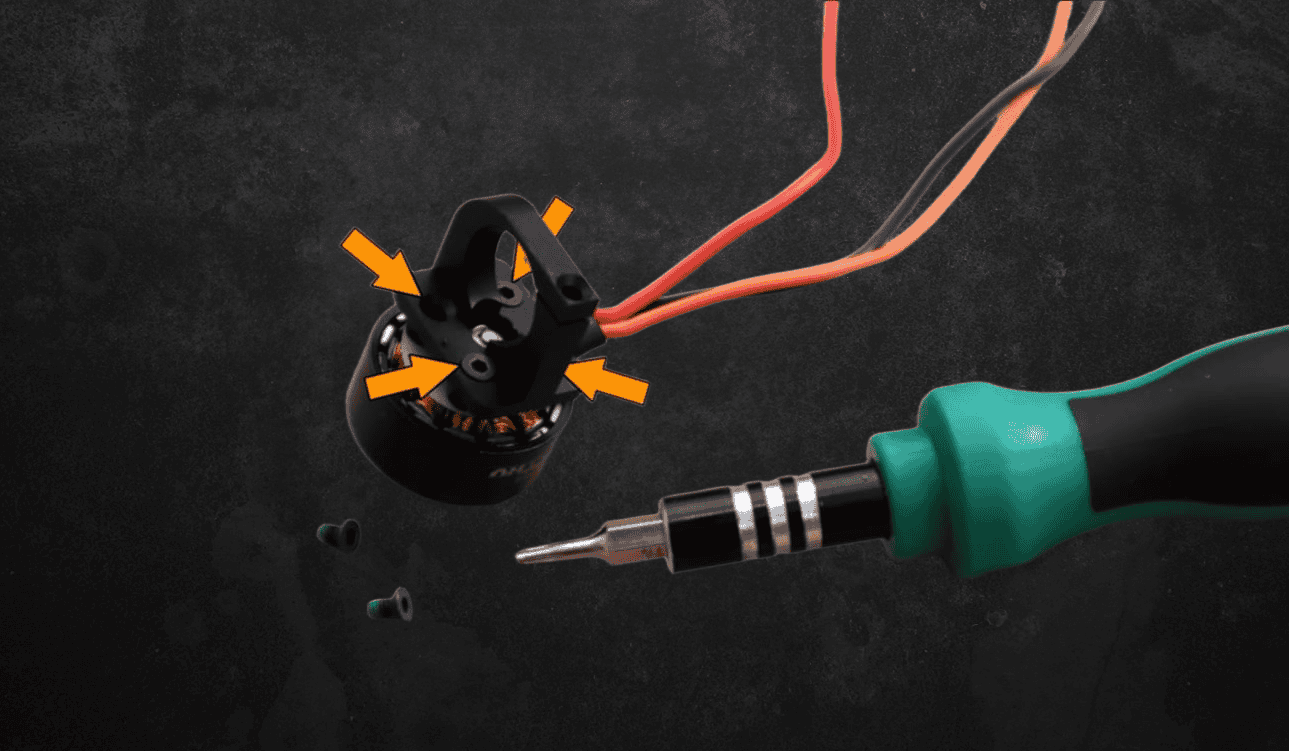
- Возьмите кронштейн крепления мотора (из набора сервопривода) и прикрепите мотор к кронштейну с помощью 4 винтов.
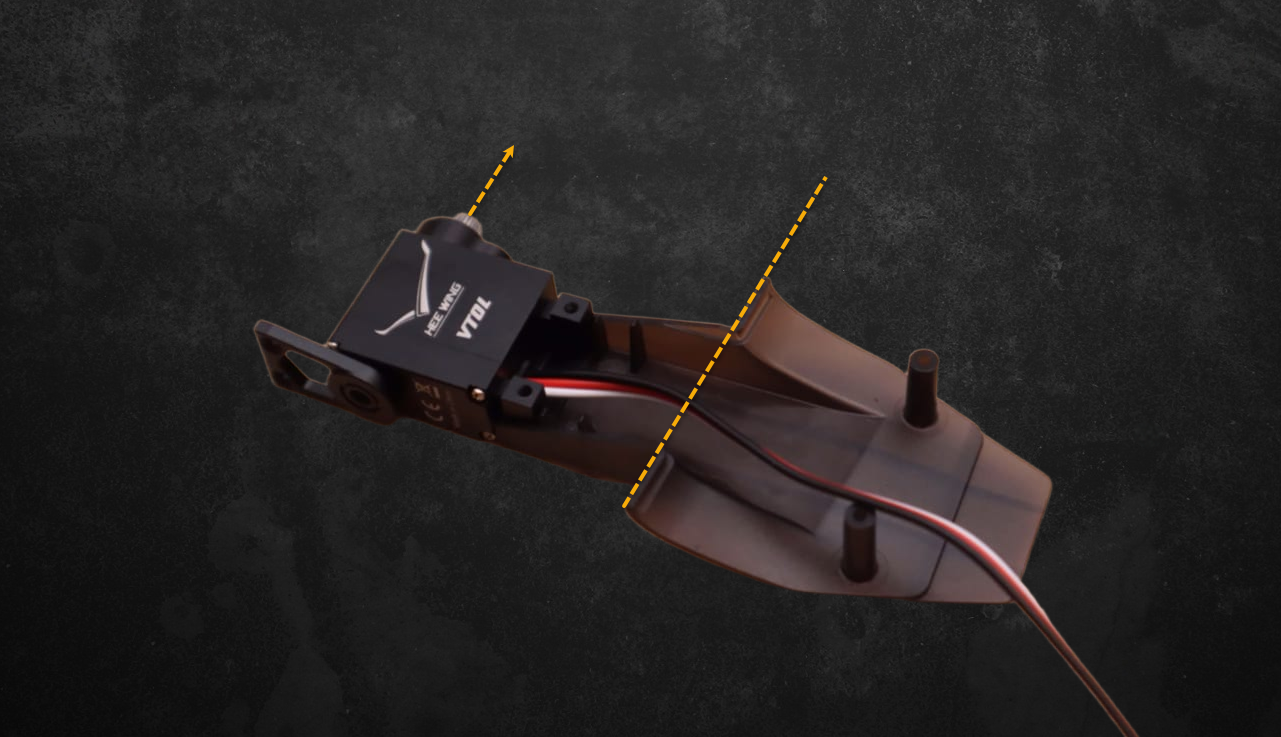
- Прикрепите кронштейн к сервоприводу с помощью 2 винтов. Следите за ориентацией: мотор должен быть на плоской стороне кронштейна, а определенный конец должен быть направлен к фюзеляжу.

- Установите рычаг сервопривода на сам сервопривод.
- Закрепите рычаг на кронштейне сервомотора с помощью 3 винтов.
- Возьмите один horn (коромысло) и clasp (зажим) из пакета деталей механической связи (из PNP-комплекта).
- С помощью капли клея UHU POR установите horn на нижнюю сторону элерона и закрепите его clasp.

- Возьмите clevis (тягу) и pushrod (пруток) из того же пакета и соедините их.
- Наденьте один конец pushrod на рычаг сервопривода, а другой конец закрепите на horn элерона.
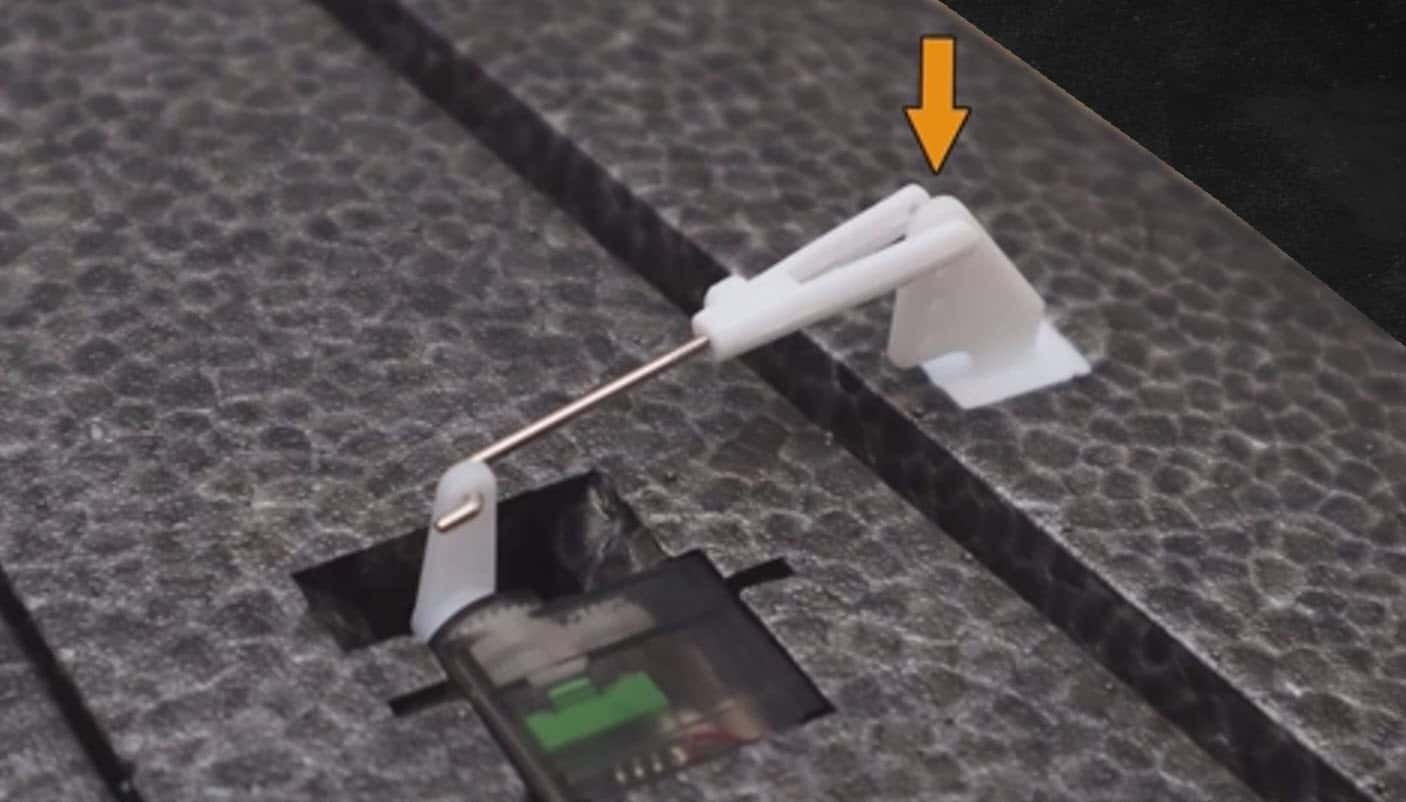
Примечание: Эту операцию, возможно, нужно будет повторить после программирования сервоприводов.
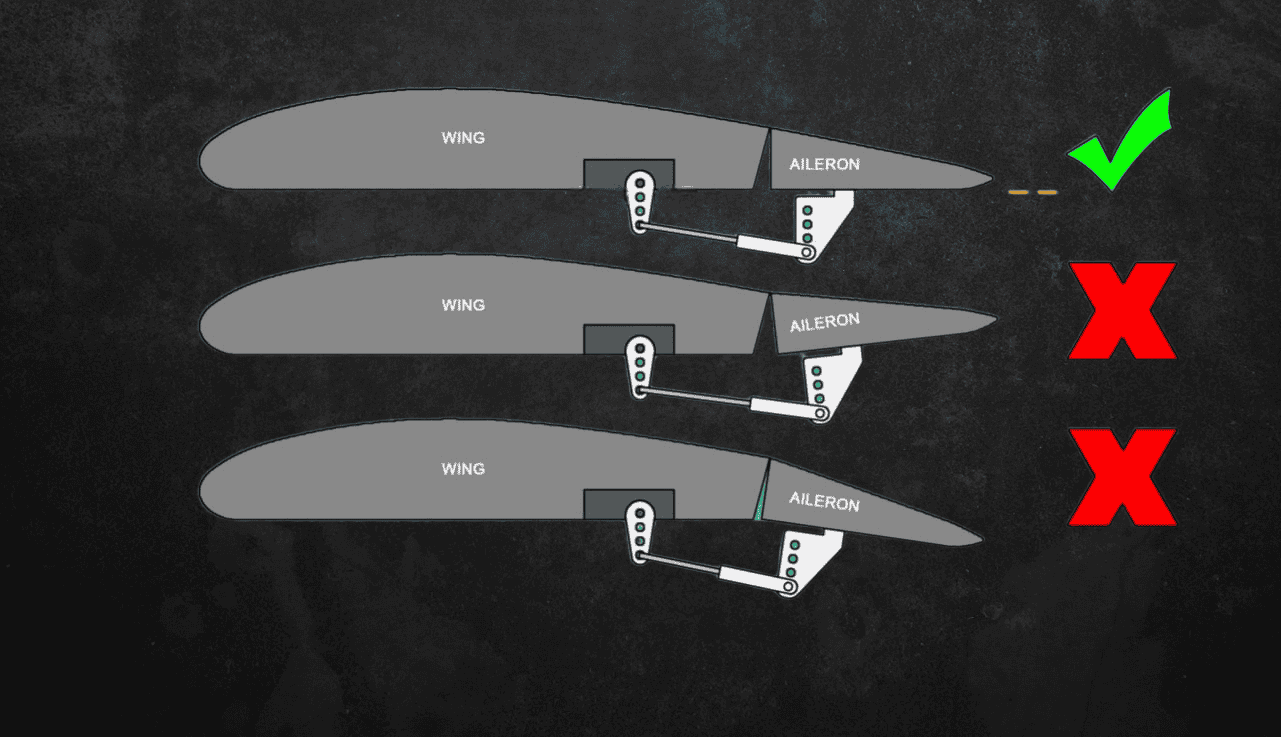
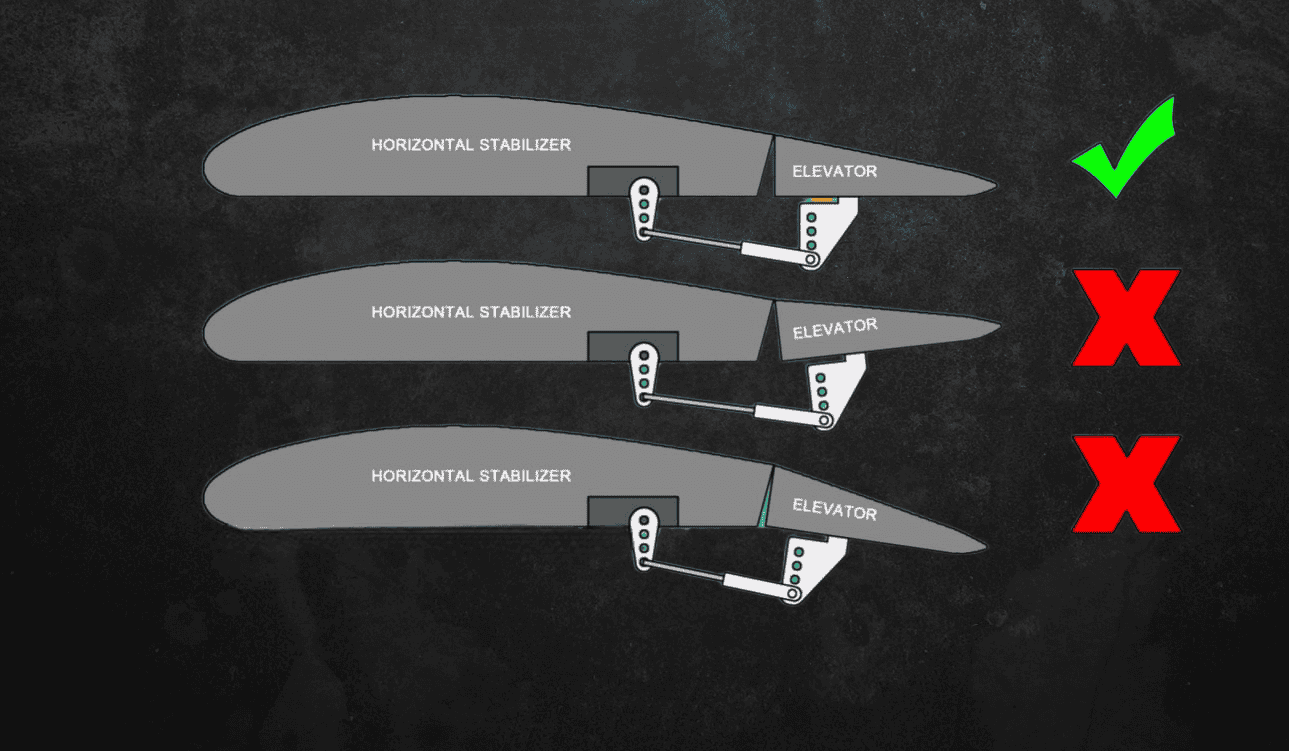
- Проверьте правильность сборки: когда сервопривод находится в нейтральном положении, элерон должен быть вровень с крылом.
- Повторите шаги 1-25 для правого крыла.

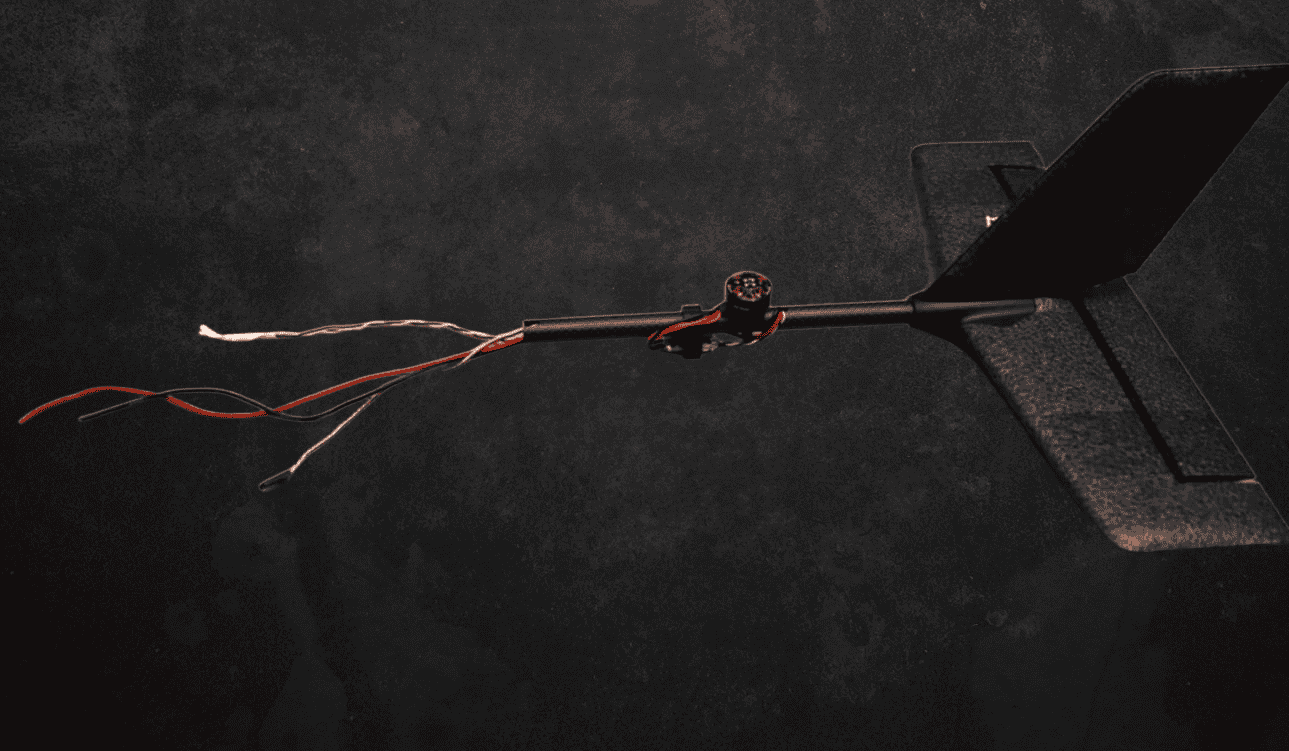
Этап 2: Сборка хвостового оперения и установка хвостового двигателя
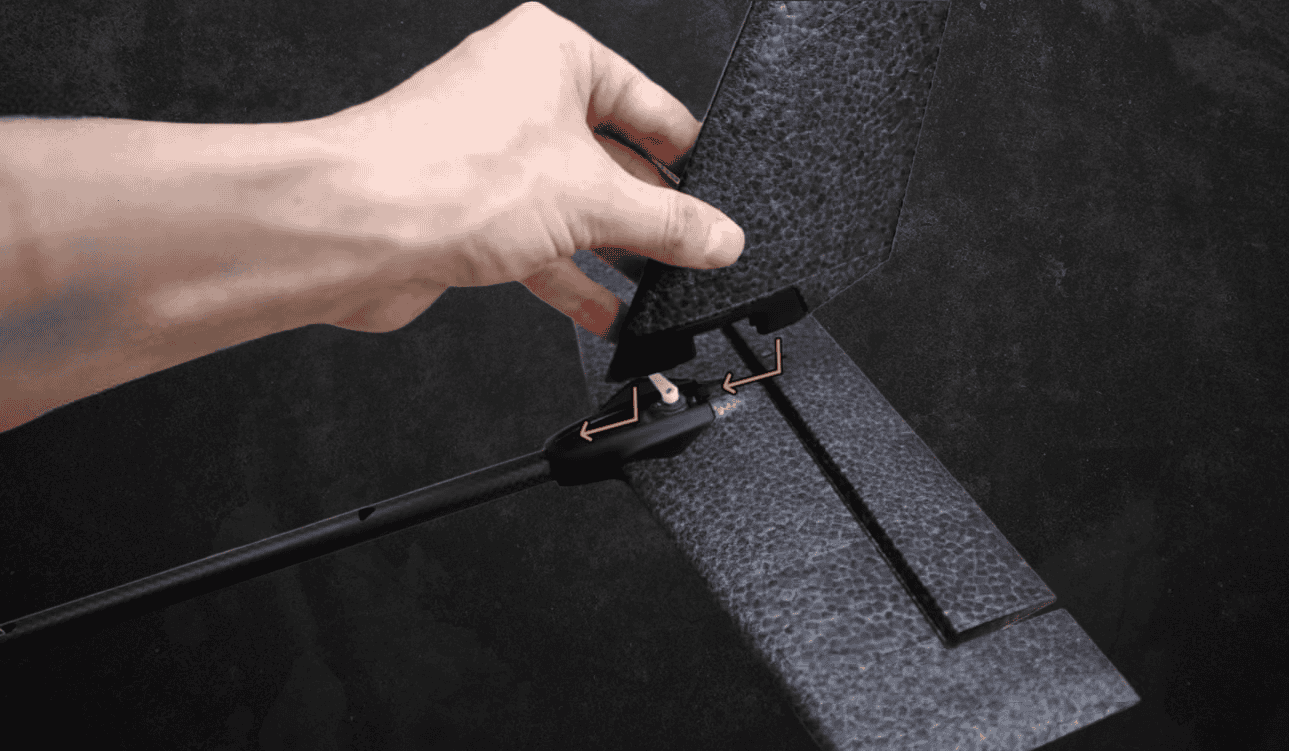
- Возьмите три хвостовые компоненты: горизонтальный стабилизатор, вертикальный стабилизатор и карбоновую хвостовую балку (из VTOL-комплекта, не металлическую).
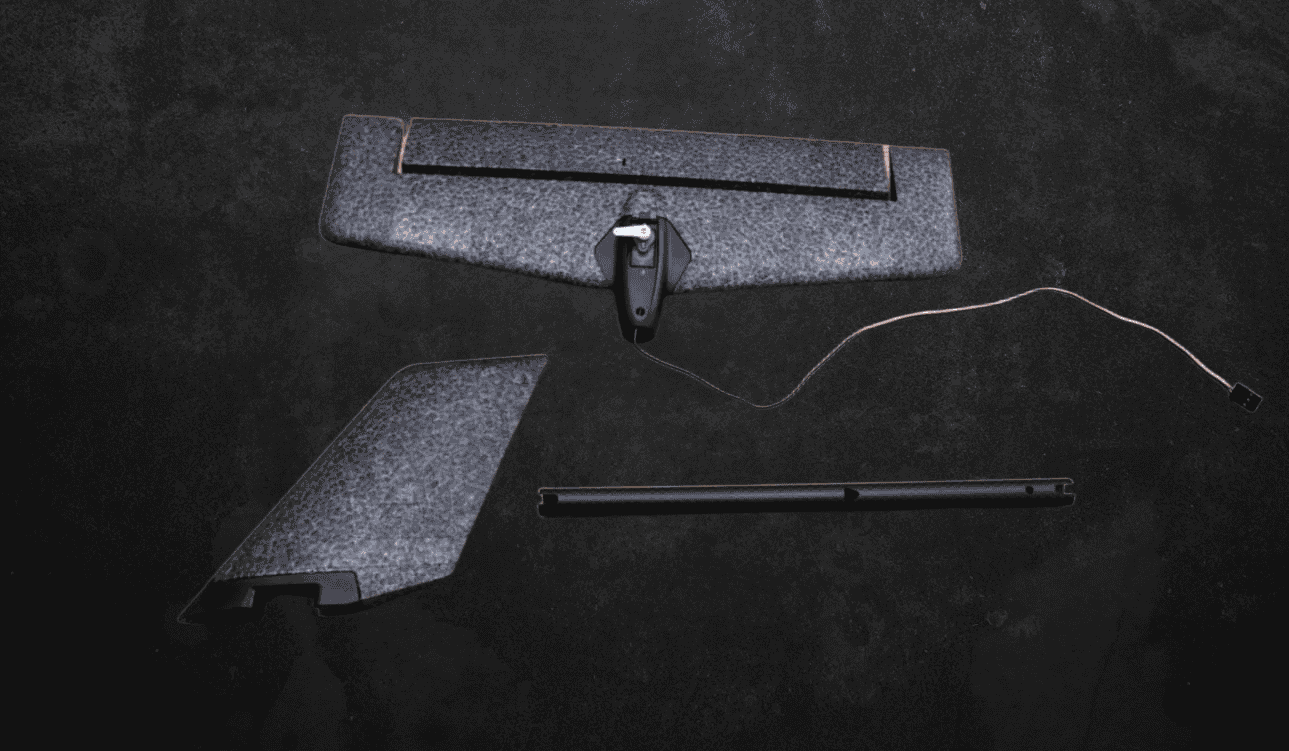
- Проденьте провод сервопривода руля высоты через хвостовую балку. Следите за правильной ориентацией балки (конец трубки должен быть направлен к стабилизатору).
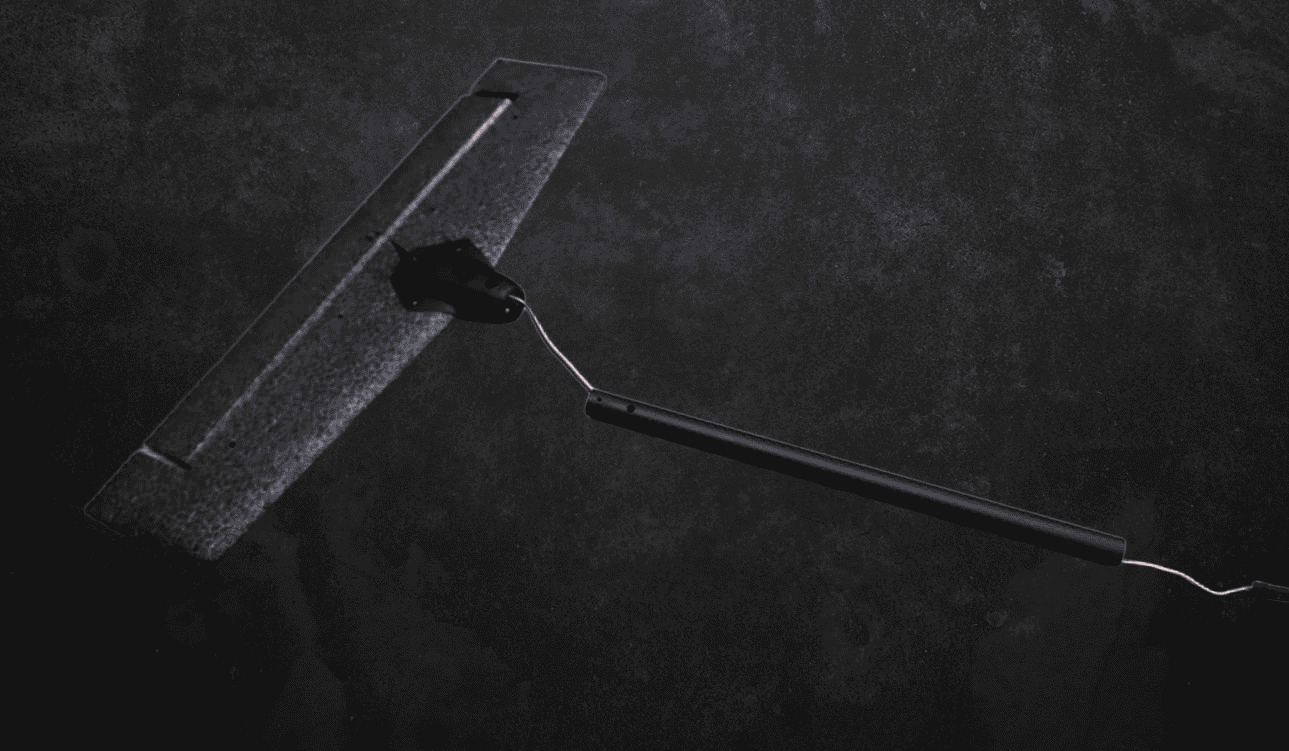
- Установите хвостовую балку в горизонтальный стабилизатор, следя, чтобы провод не был передавлен. Убедитесь, что отверстия совпадают.

- Защелкните вертикальный стабилизатор на месте собранной хвостовой группы.
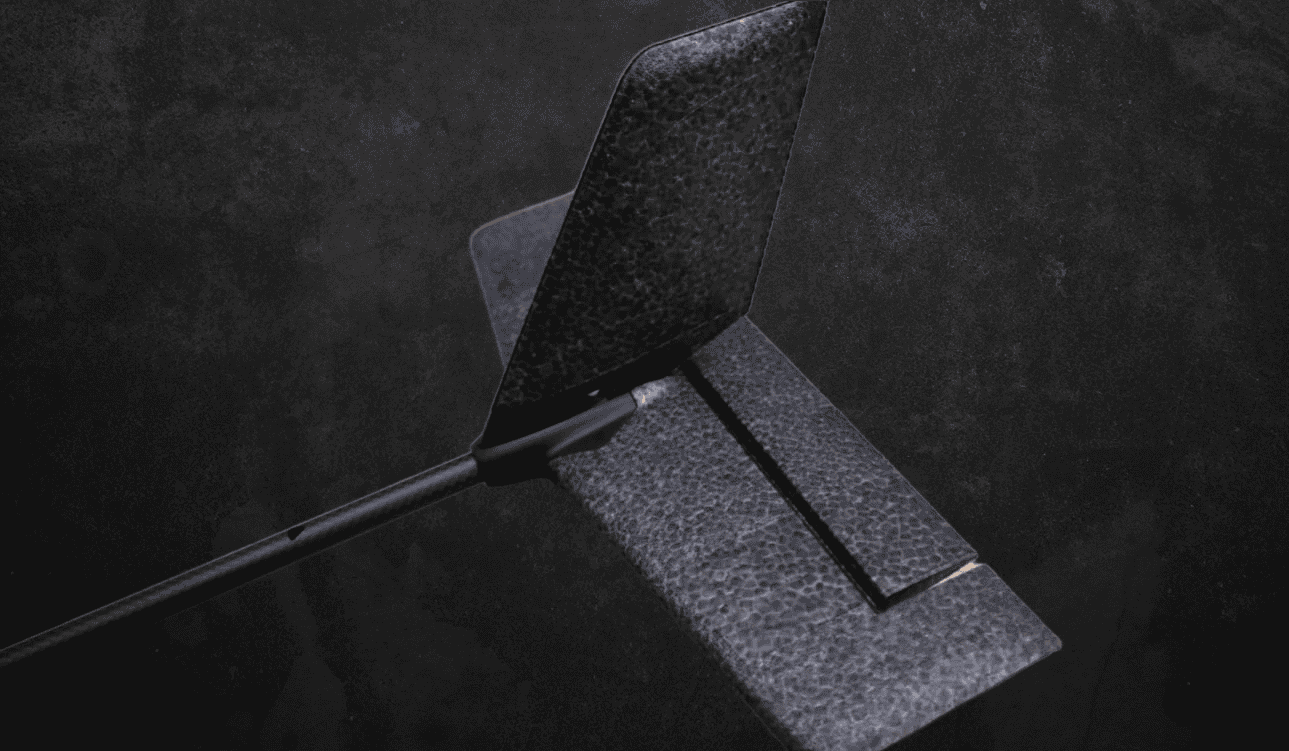
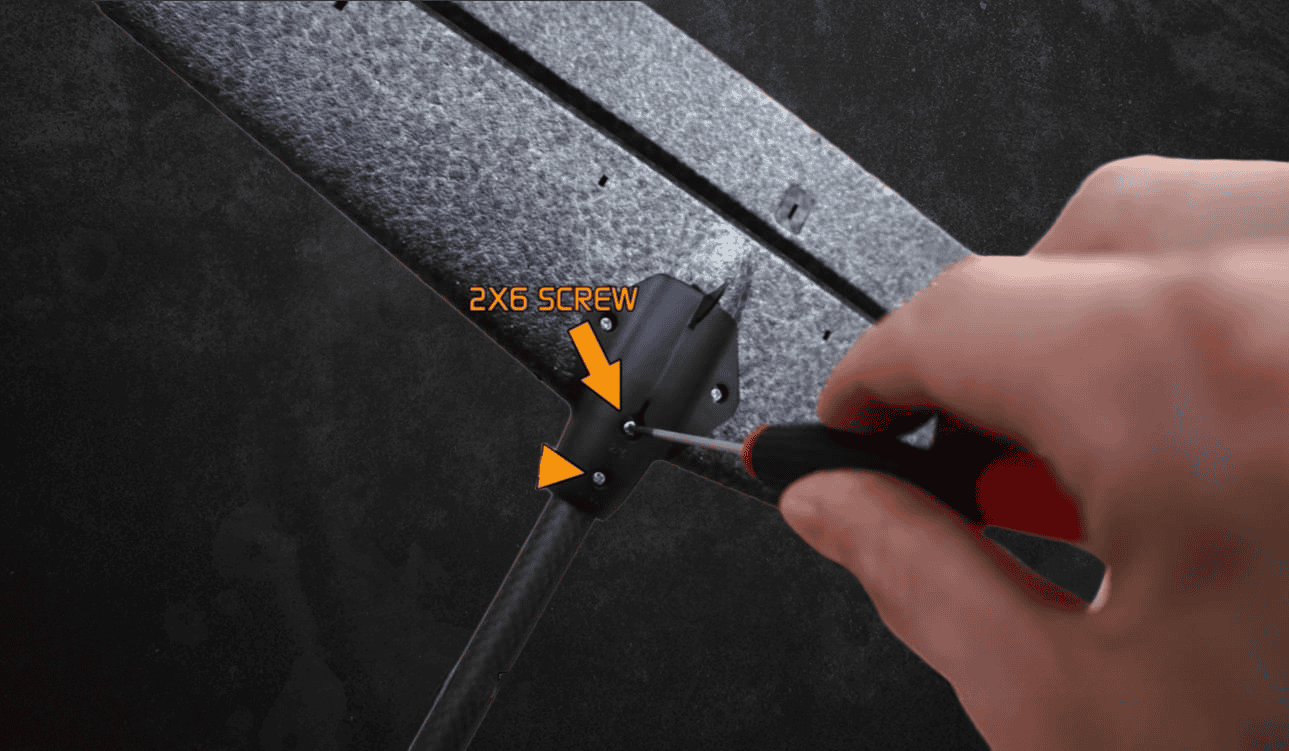
- Используйте два винта (2x6 и 2x20) из пакета деталей механической связи, чтобы скрепить все три компонента.
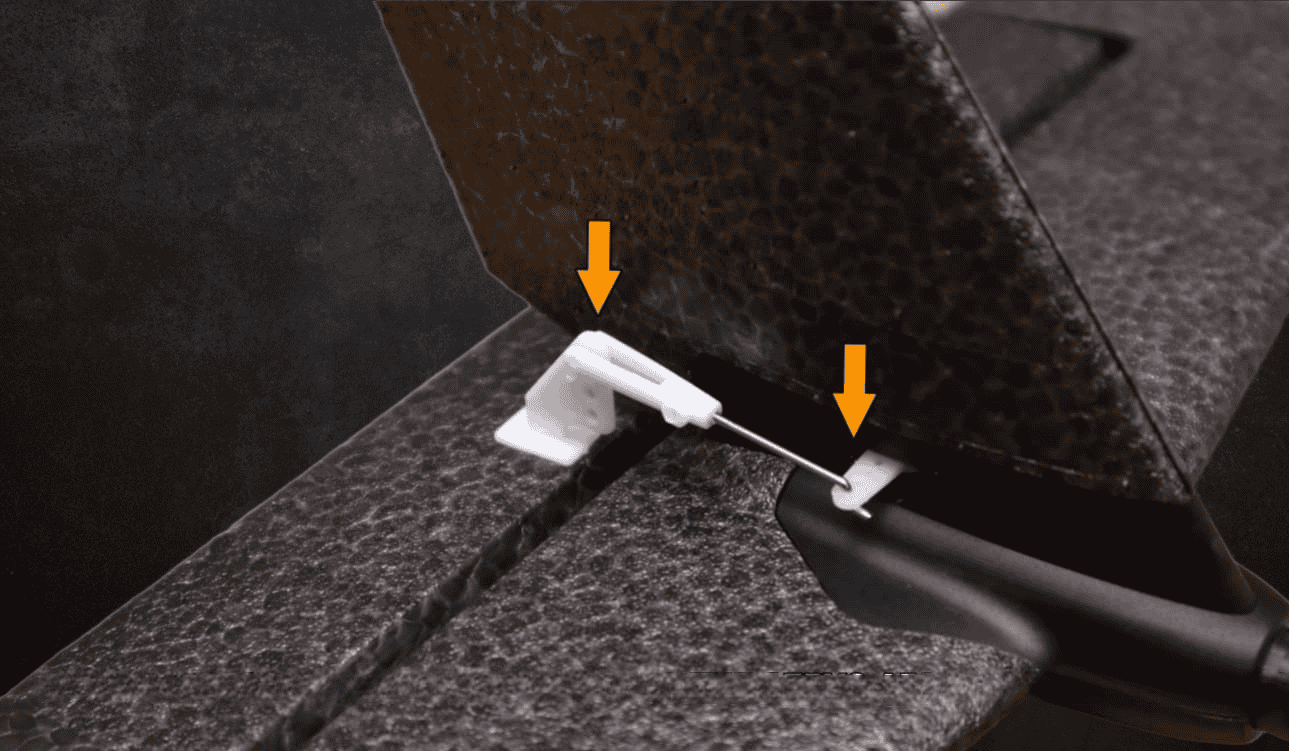
- Для управления рулем высоты повторите процесс с horn, clasp, clevis и pushrod (аналогично шагам 21-25), установив horn на верхнюю сторону руля высоты.
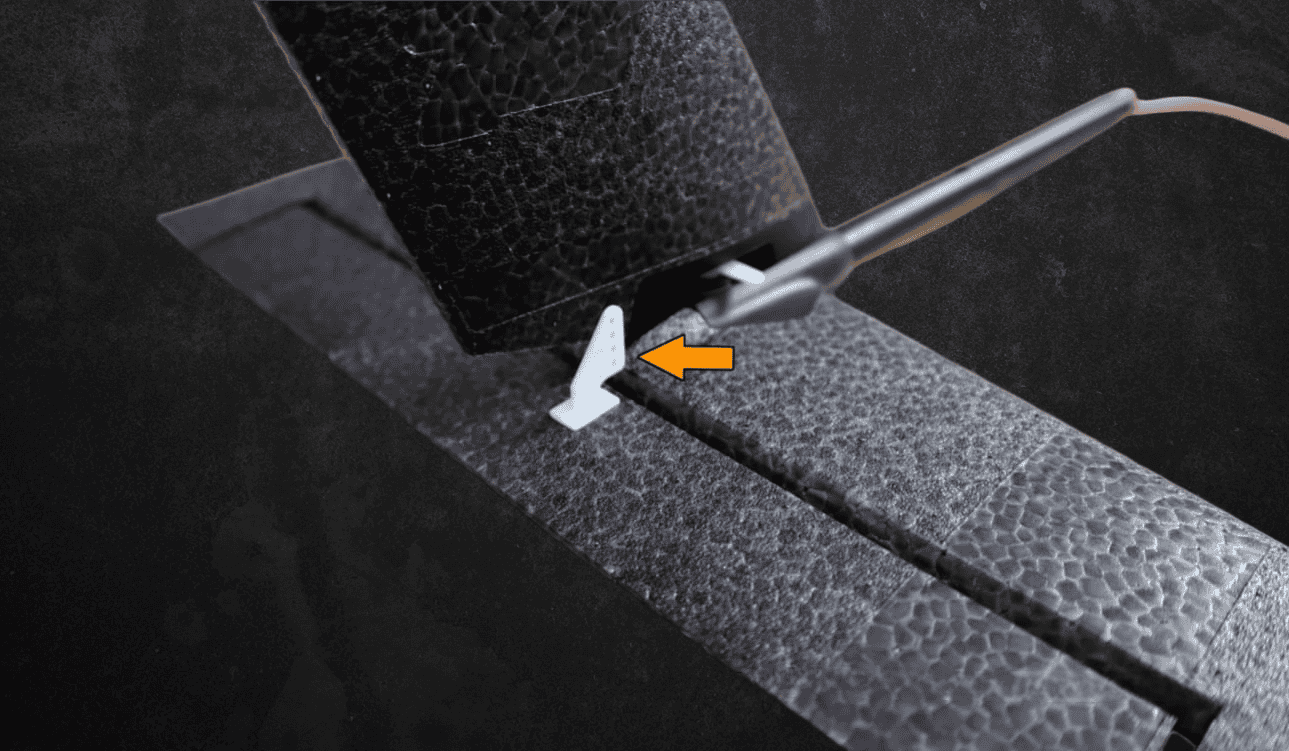

- Соедините тягу с сервоприводом руля высоты. При правильной сборке руль высоты должен быть ровным, когда сервопривод в нейтрали.
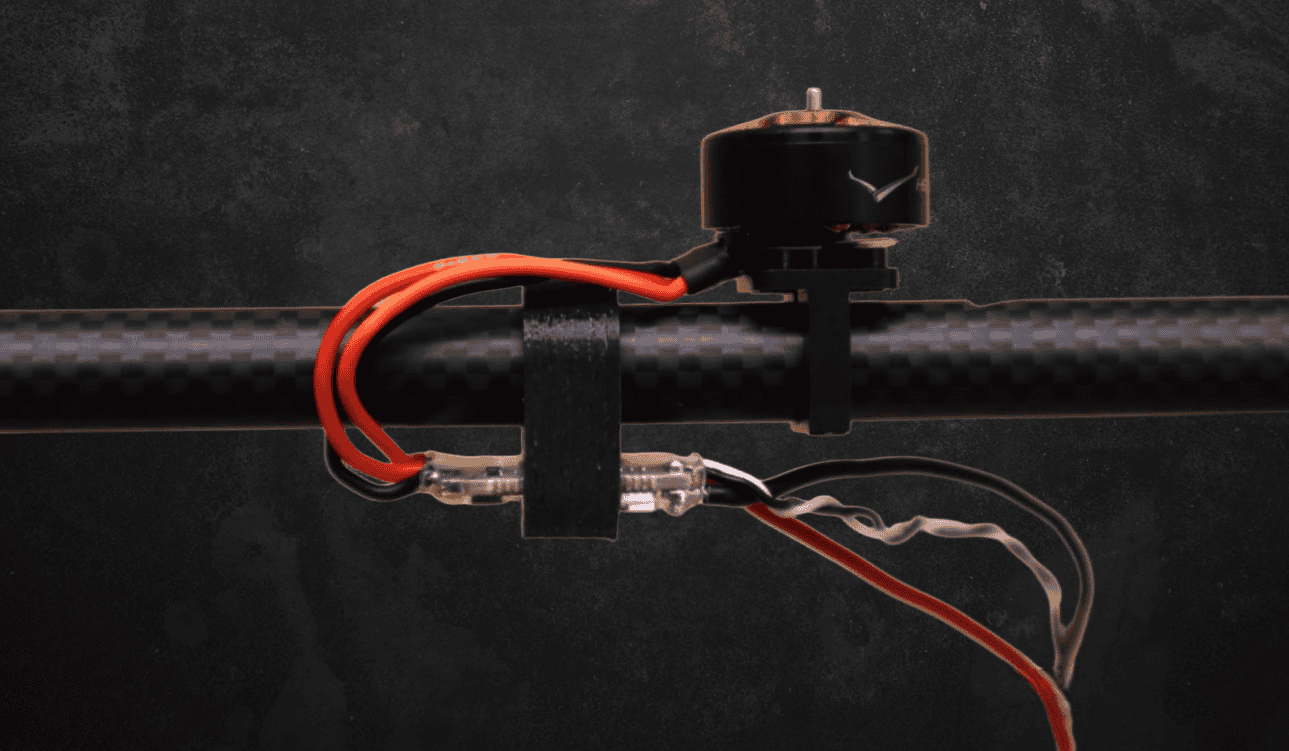
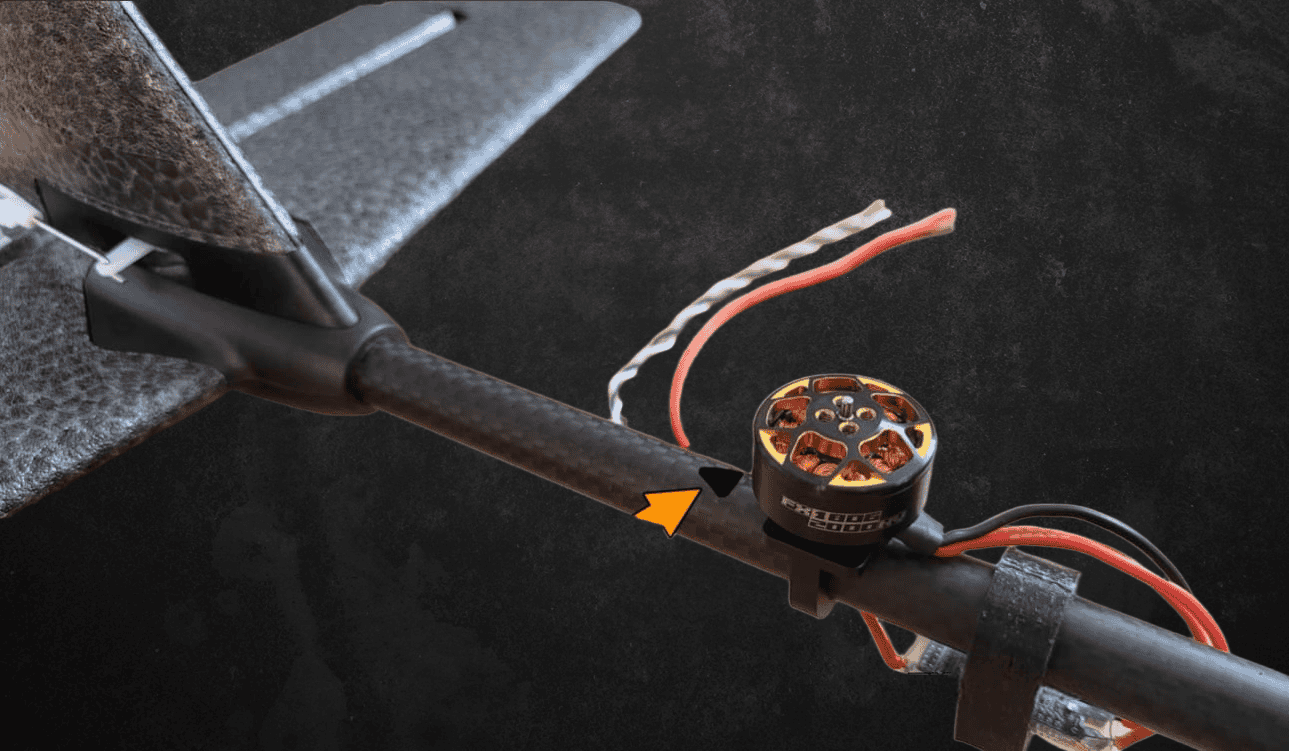
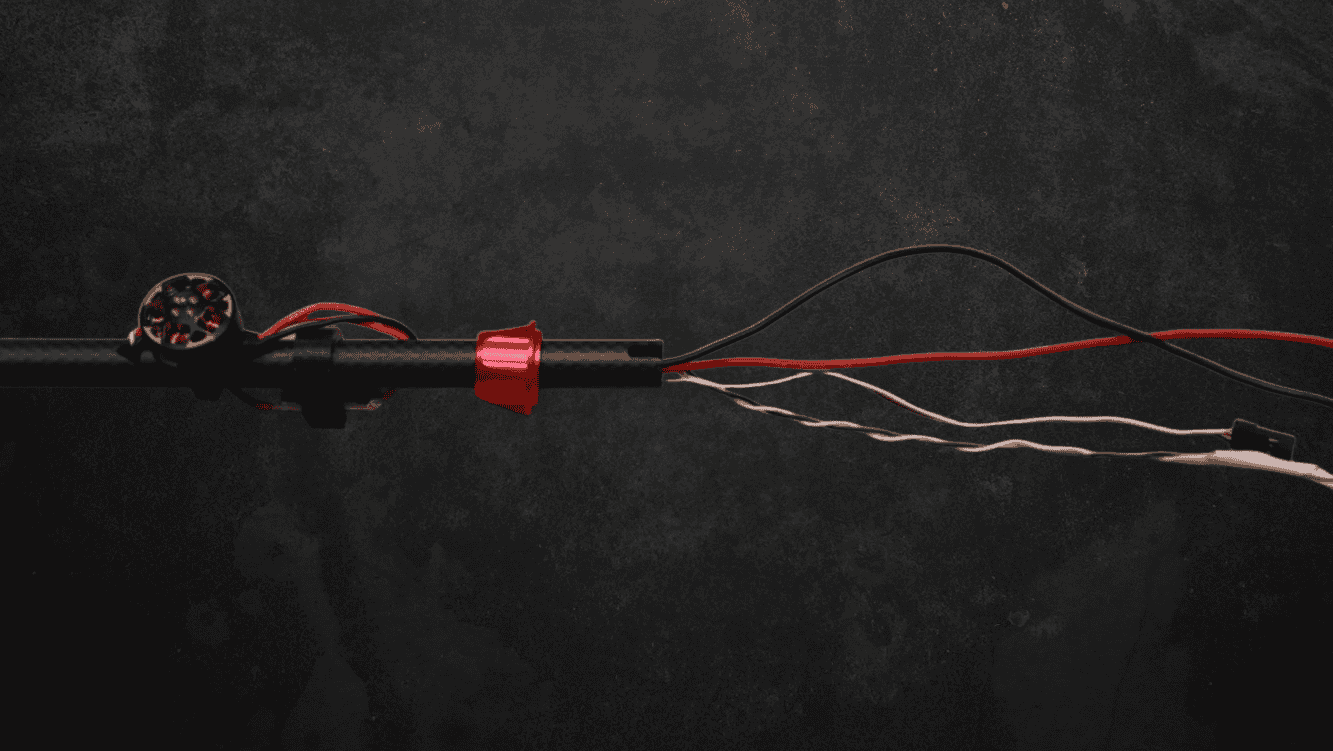
- Возьмите крепление и двигатель для хвоста (с кабелем 250 мм) из VTOL-комплекта и скрепите их.

- Наденьте крепление двигателя на хвостовую балку. Ориентируйте его так, чтобы провода мотора были направлены в сторону фюзеляжа.

- Закрепите крепление на балке винтом. Оно должно располагаться на 1 см позади отверстия в фюзеляже и быть направлено строго вверх.

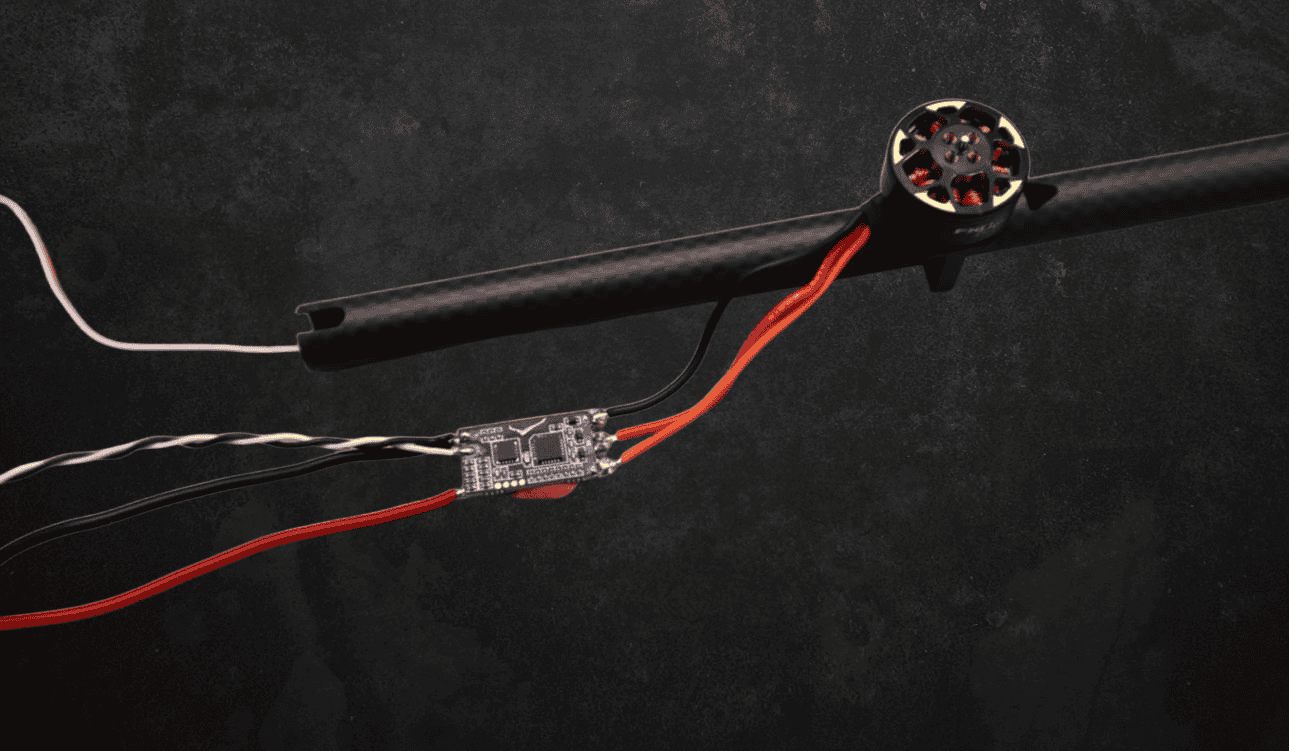
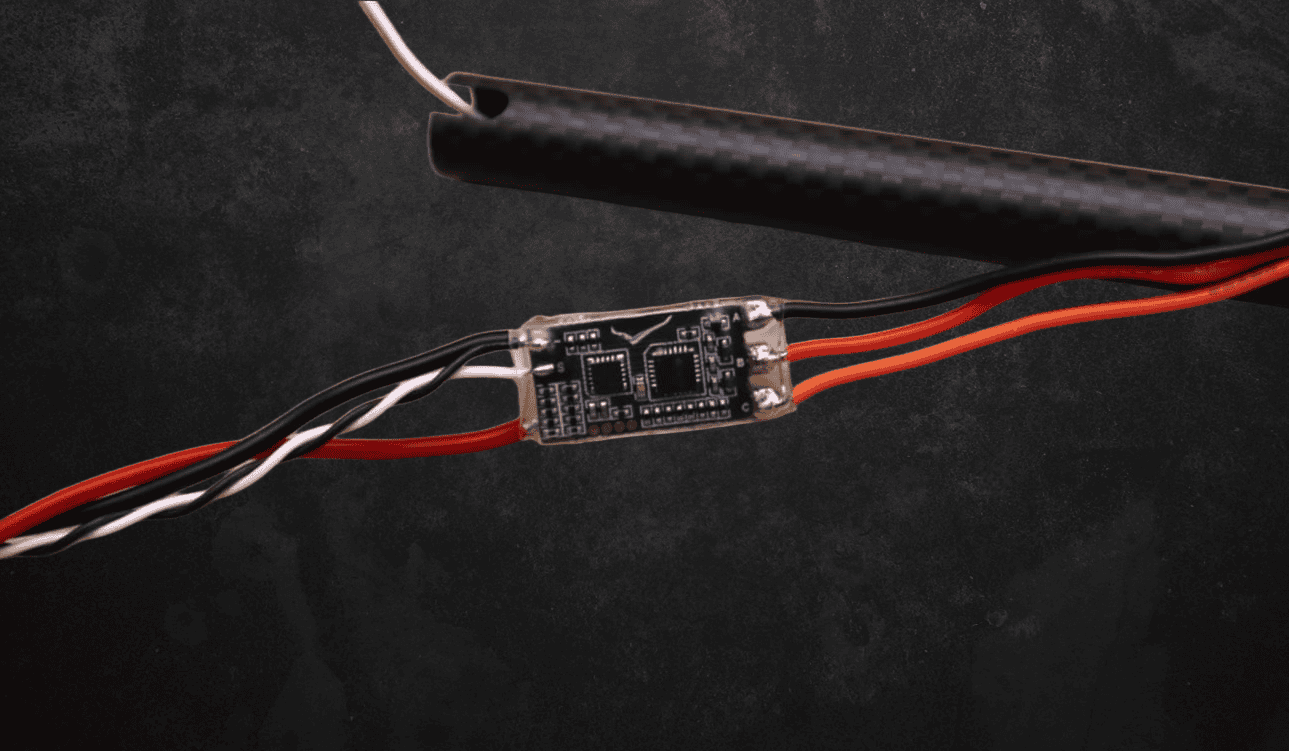
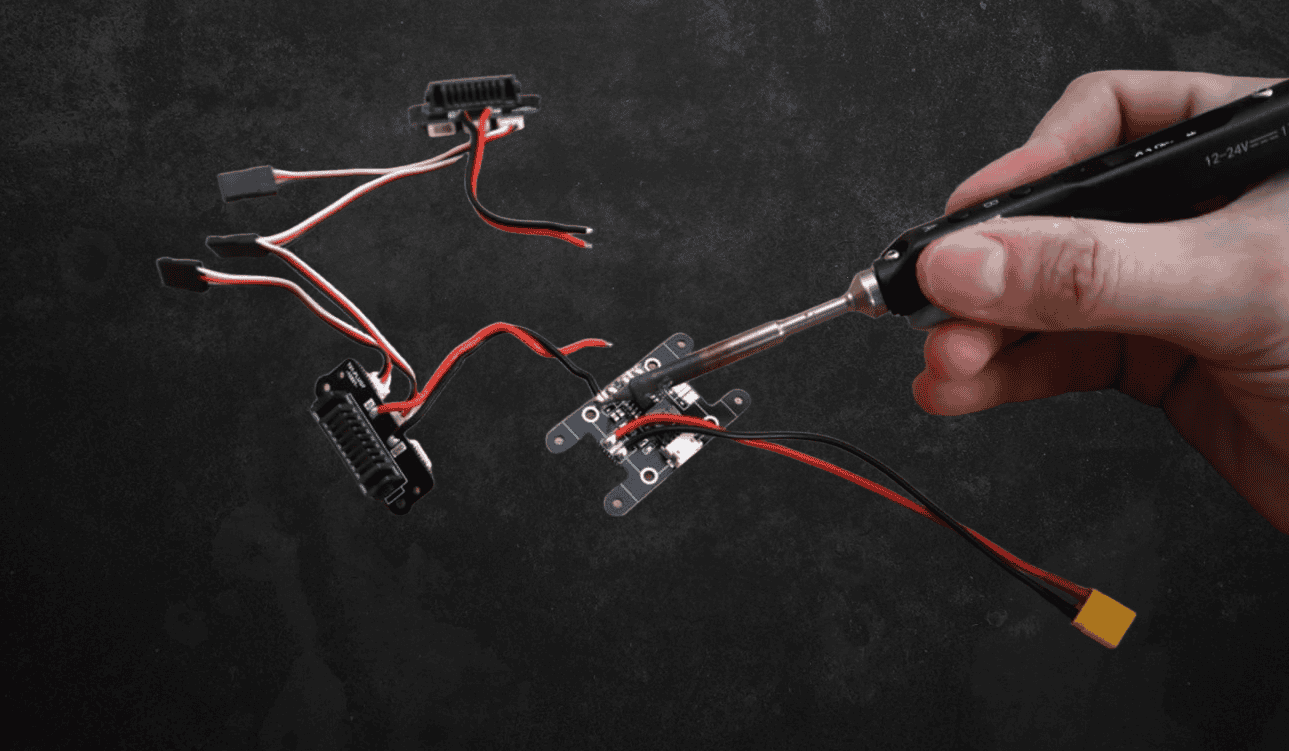
Этап 3: Подготовка и установка хвостового ESC (регулятора хода)
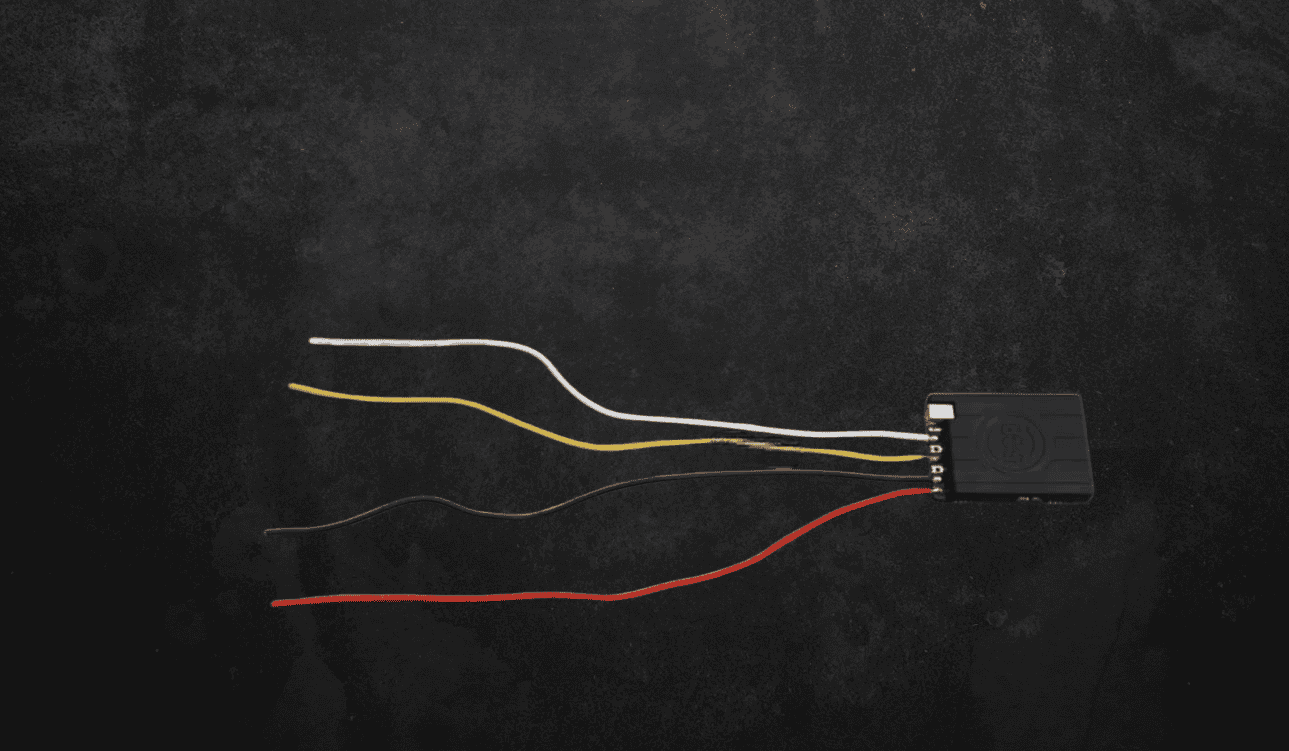
- Возьмите ESC FX-20A из VTOL-комплекта.
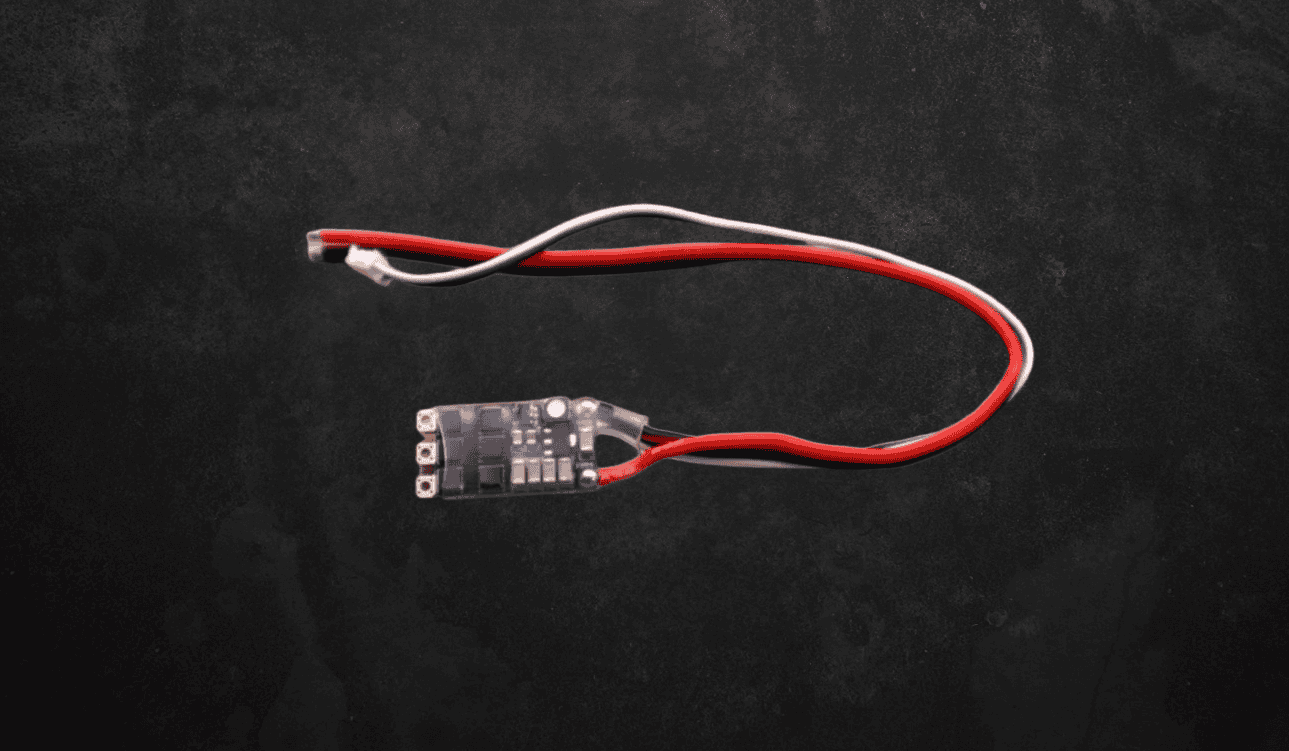
- Снимите термоусадку и отпаяйте 4 провода.
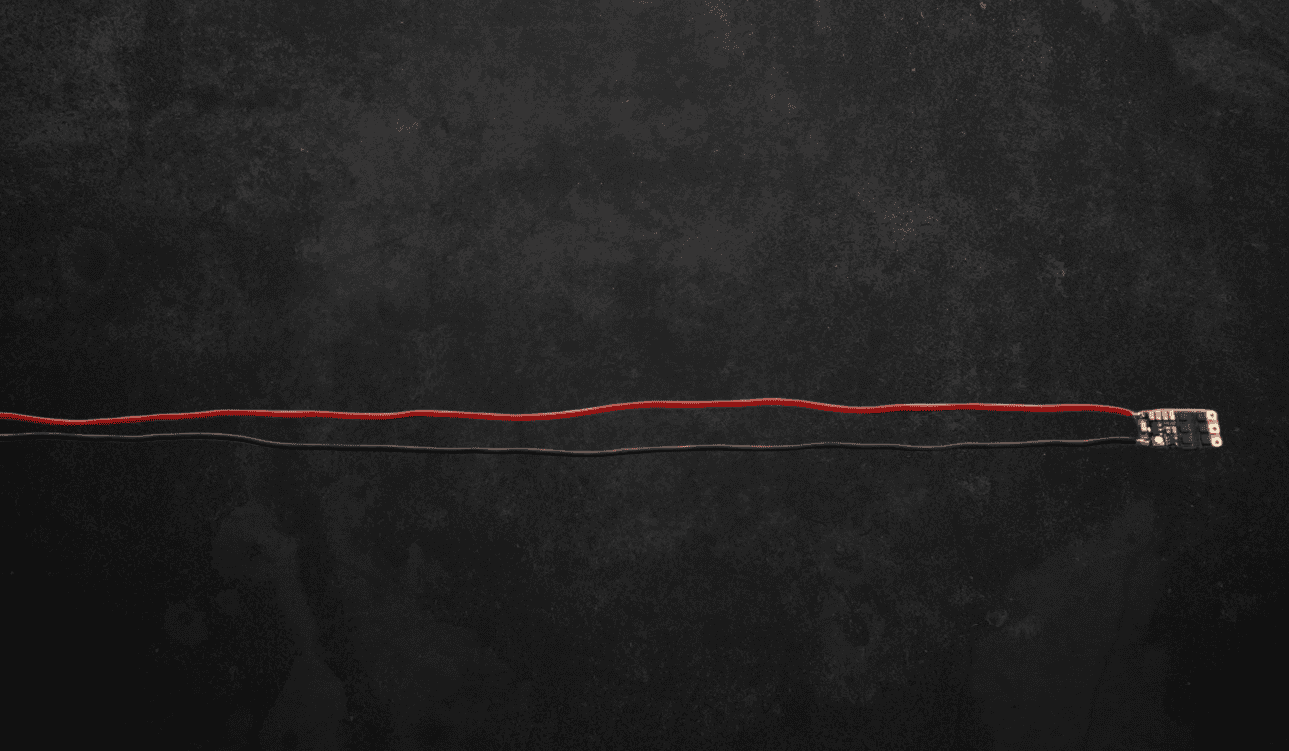
- Возьмите два провода 20AWG (красный и черный, ~30 см) и припаяйте их к ESC (красный — VBAT+, черный — GND-).
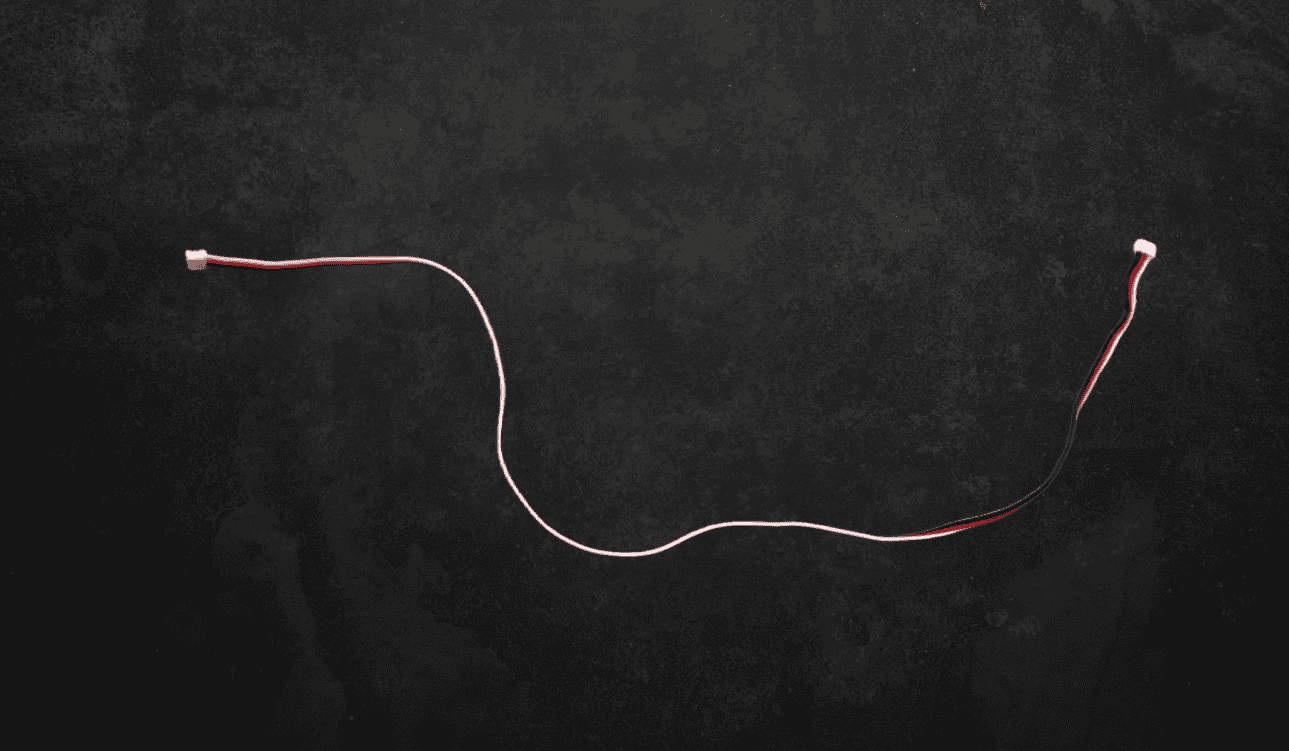
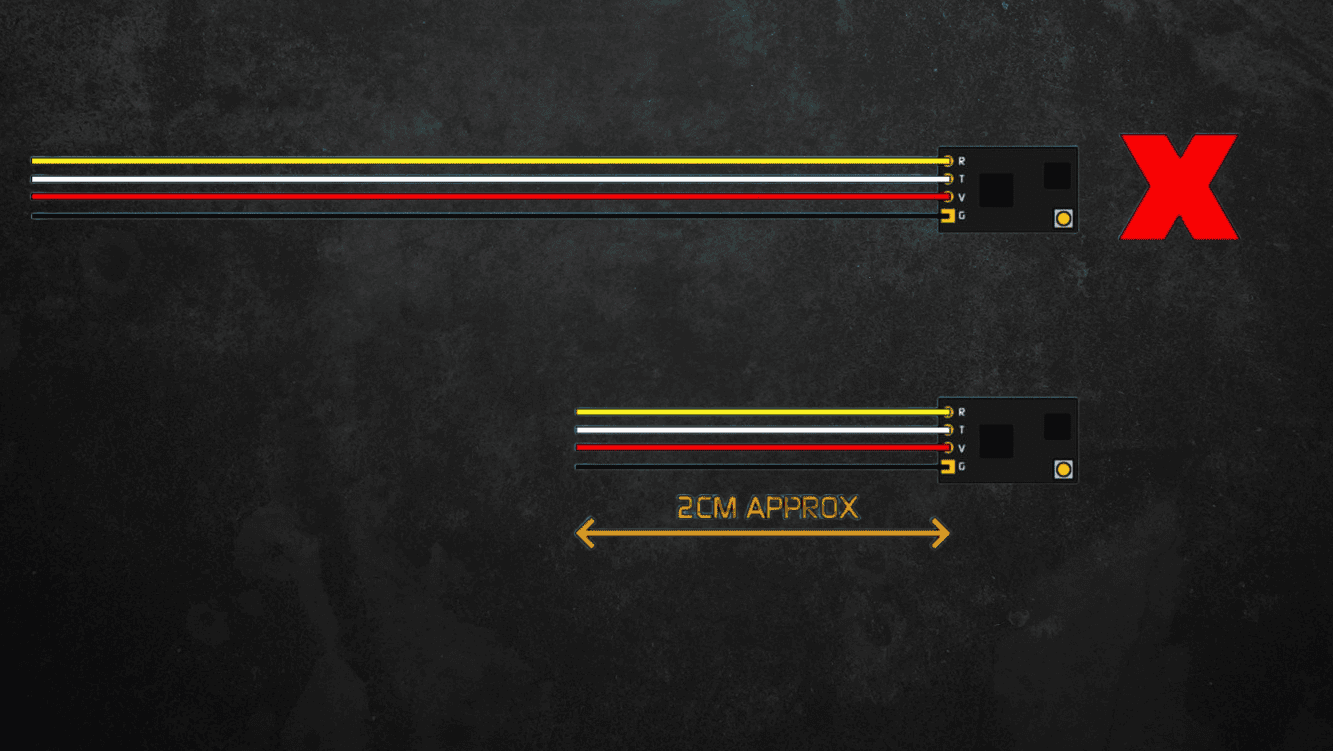
- Возьмите провод, извлеченный из крыла на шаге 7. Удалите красный провод и разъемы с обоих концов. Скрутите вместе черный и белый провода.
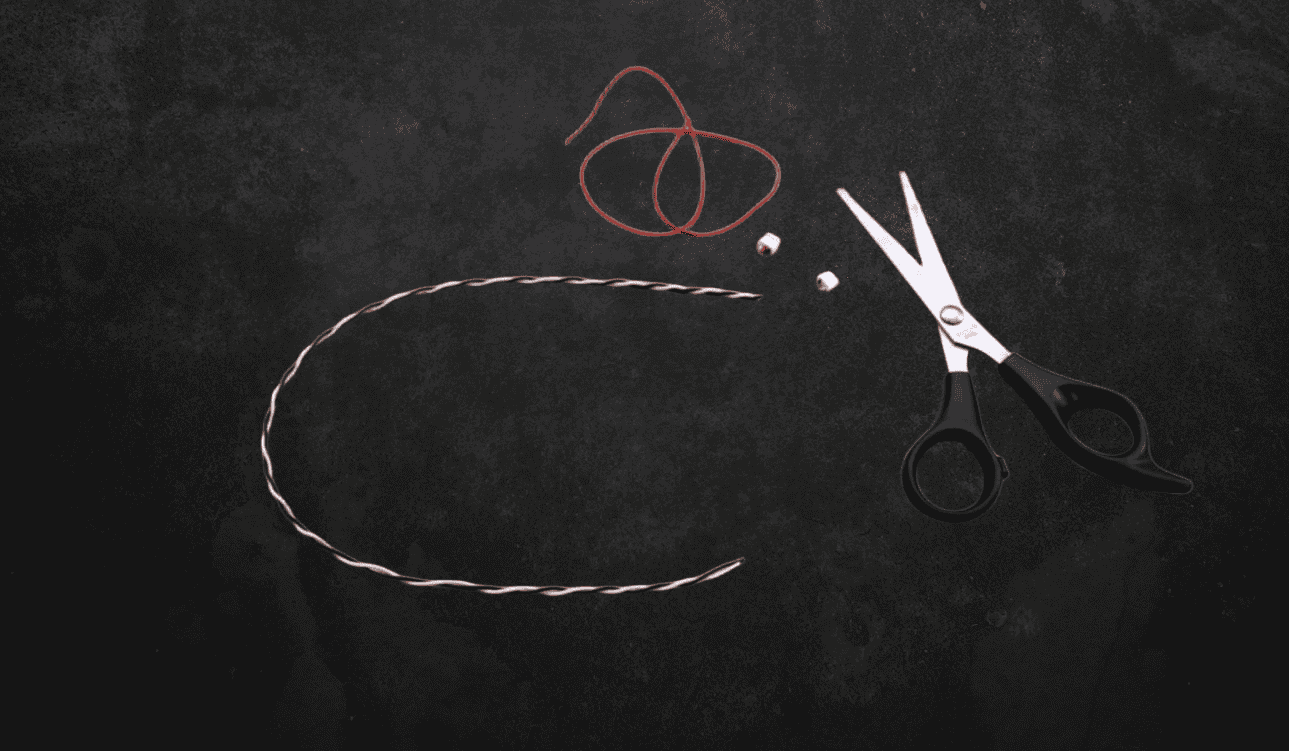
- Припаяйте этот провод к ESC (белый провод — сигнальный S, черный — GND-).
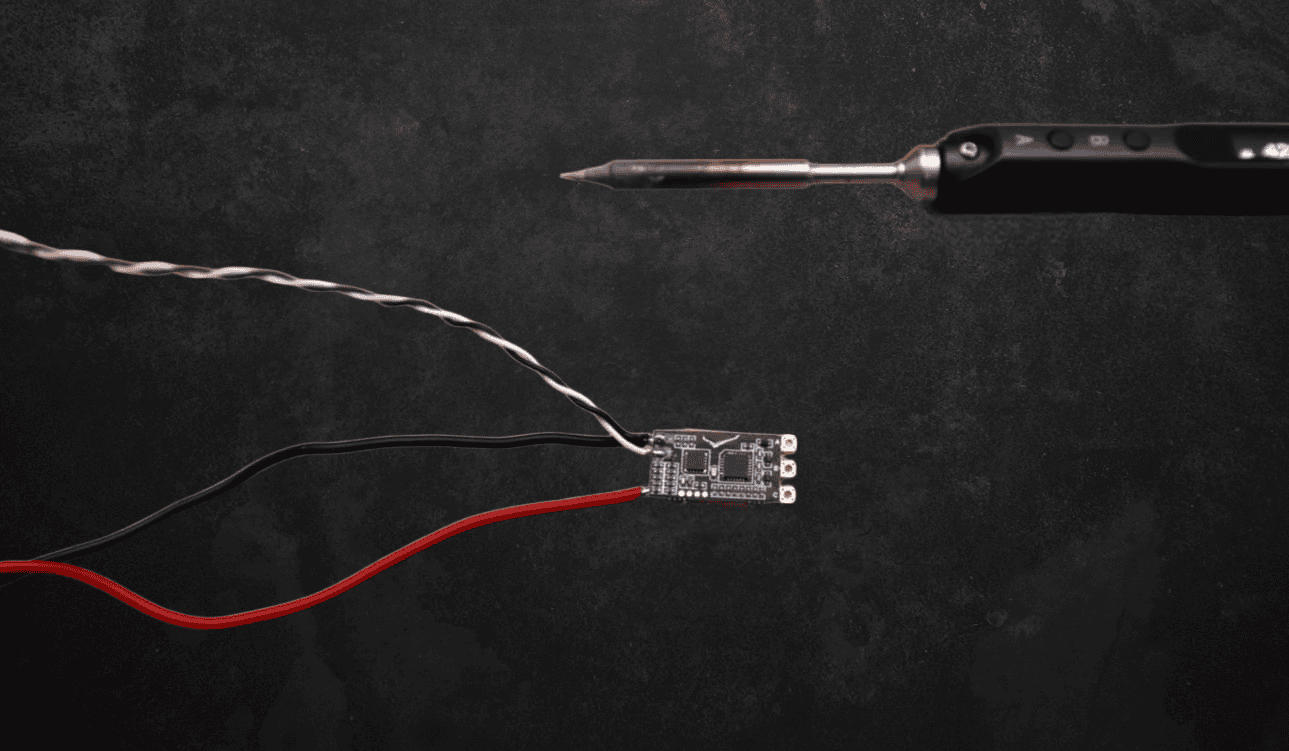
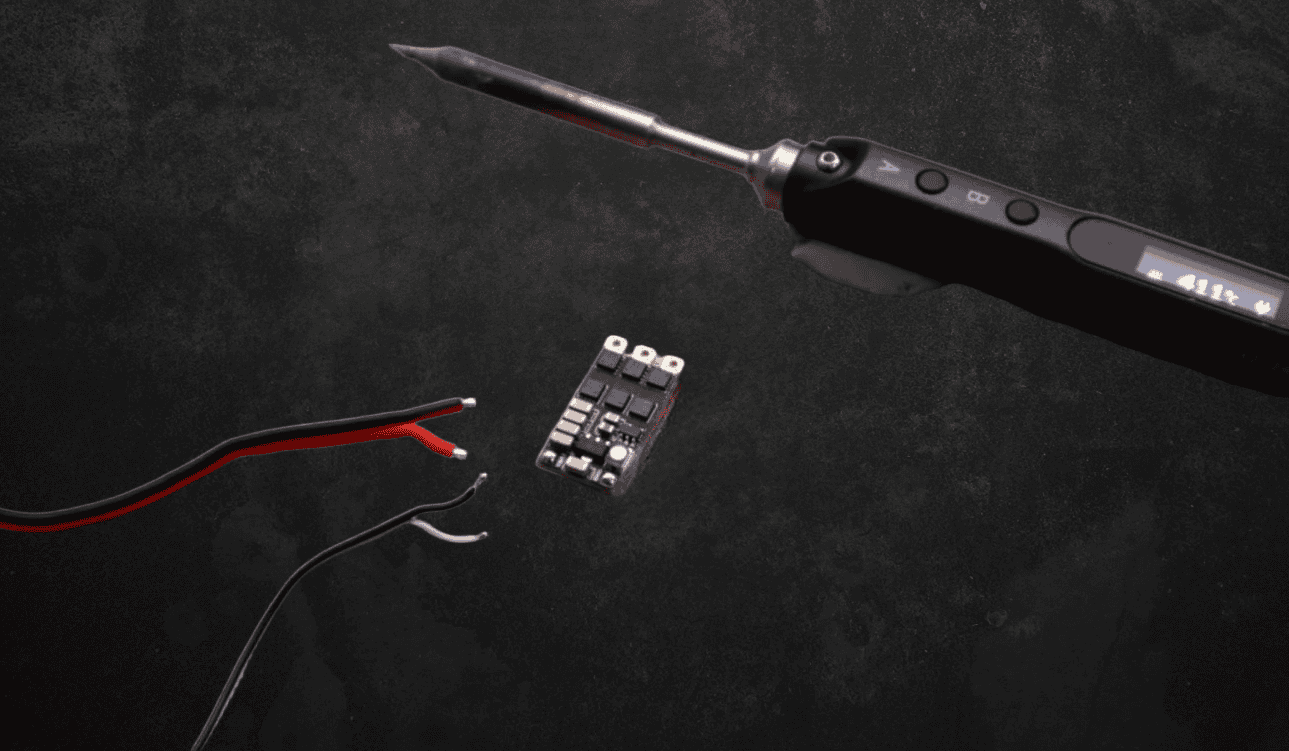
- Укоротите провода мотора до 6 см и припаяйте их к ESC (порядок не важен).

- Поместите ESC в новую термоусадку (идет в комплекте с ESC).
- Возьмите 3D-печатное крепление для ESC и наденьте его на хвостовую балку.


- Проденьте провода ESC через отверстие в креплении и установите ESC в крепление.

- Проденьте провода ESC через отверстие в хвостовой балке и выведите их через ее конец.
Этап 4: Монтаж электроники в фюзеляже
- Извлеките из фюзеляжа провод LED (который идет на разъемы крыльев) и уберите его.
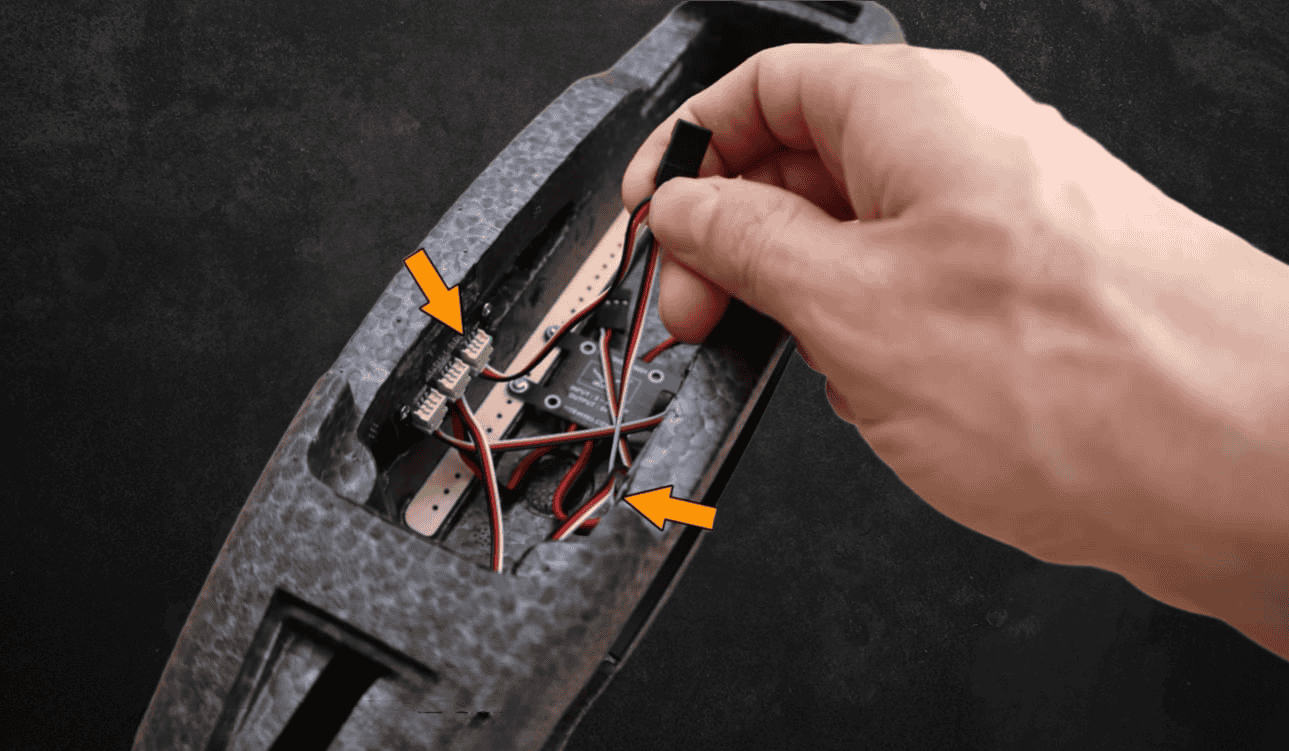

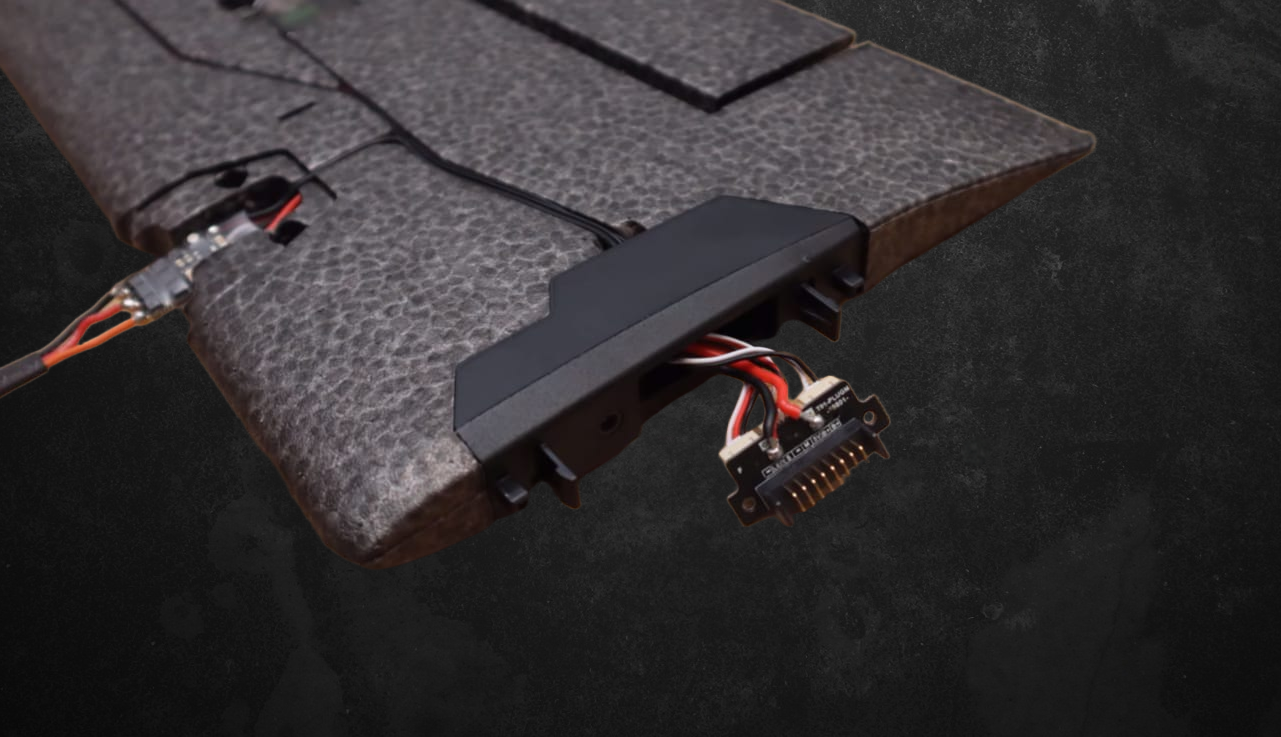
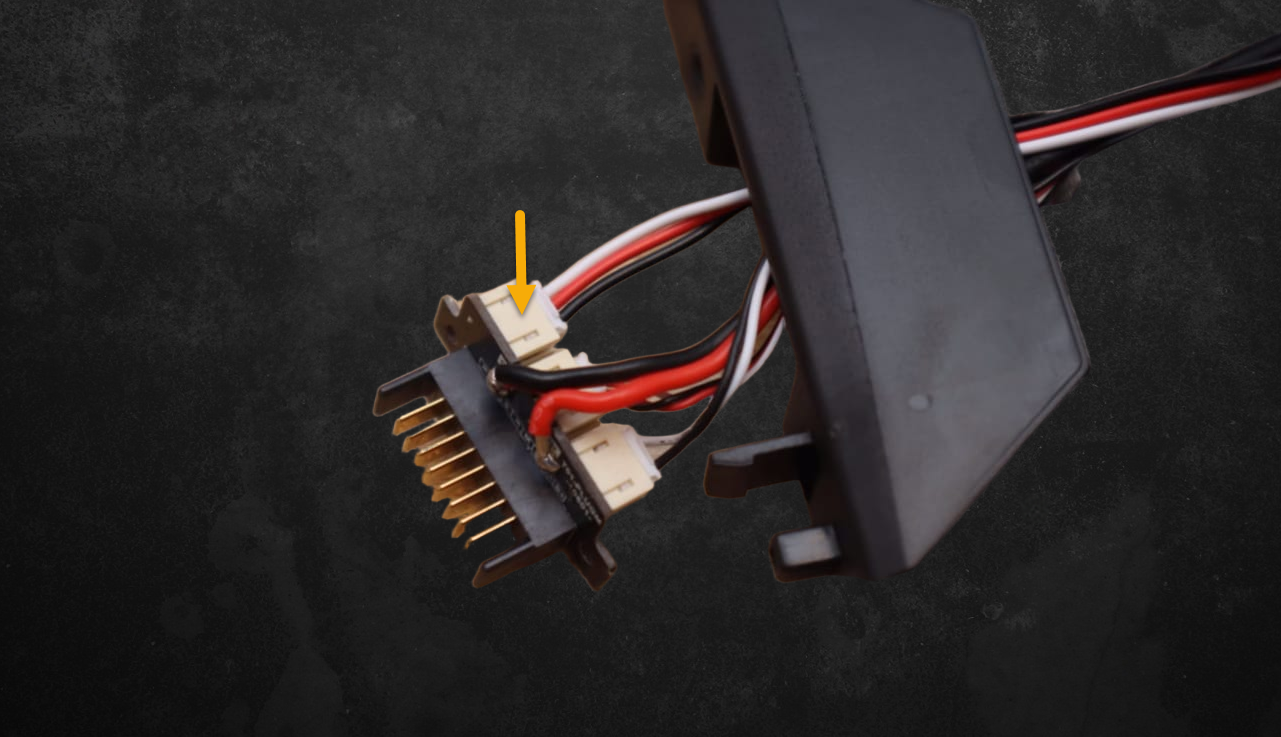
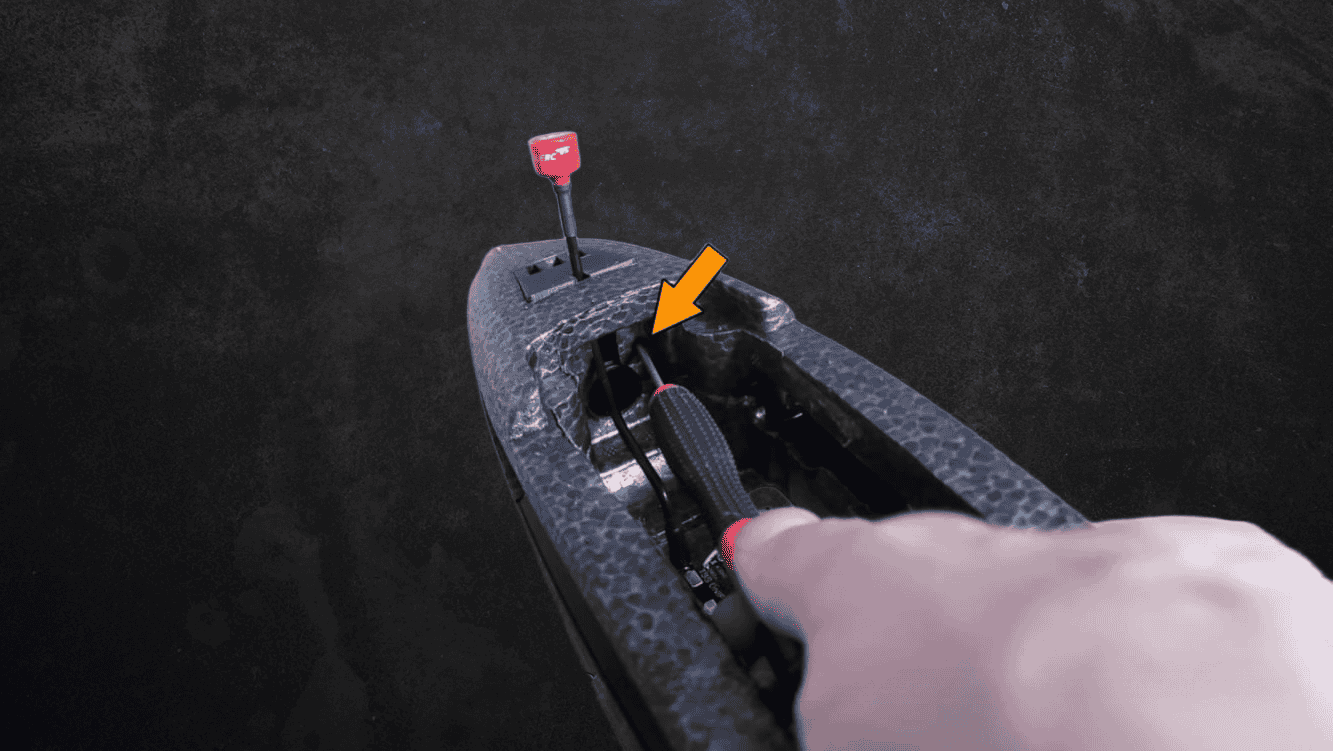
- Снимите 4 винта, удерживающие PDB (плату распределения питания), и 2 винта на каждом быстросъемном коннекторе. Сохраните все эти винты. Извлеките всю сборку из фюзеляжа.
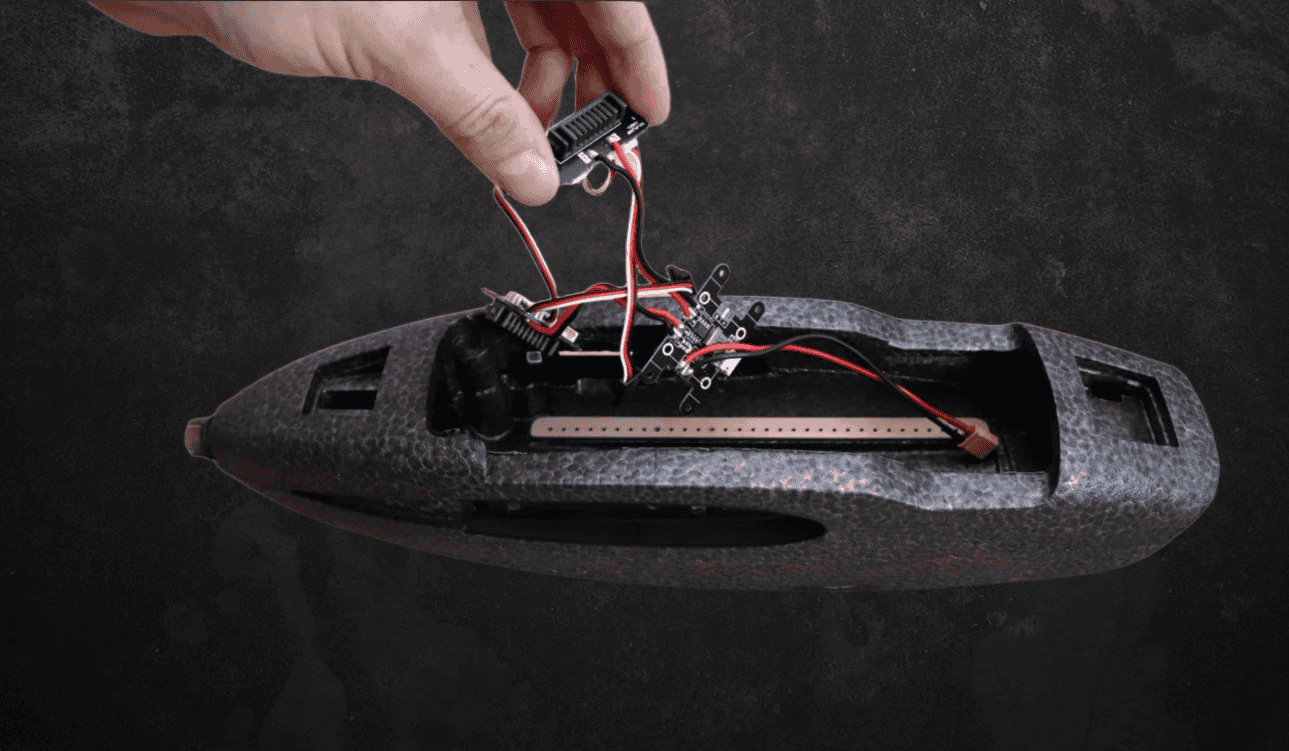
- Отпаяйте быстросъемные коннекторы от PDB. PBD больше не нужна, коннекторы отложите.

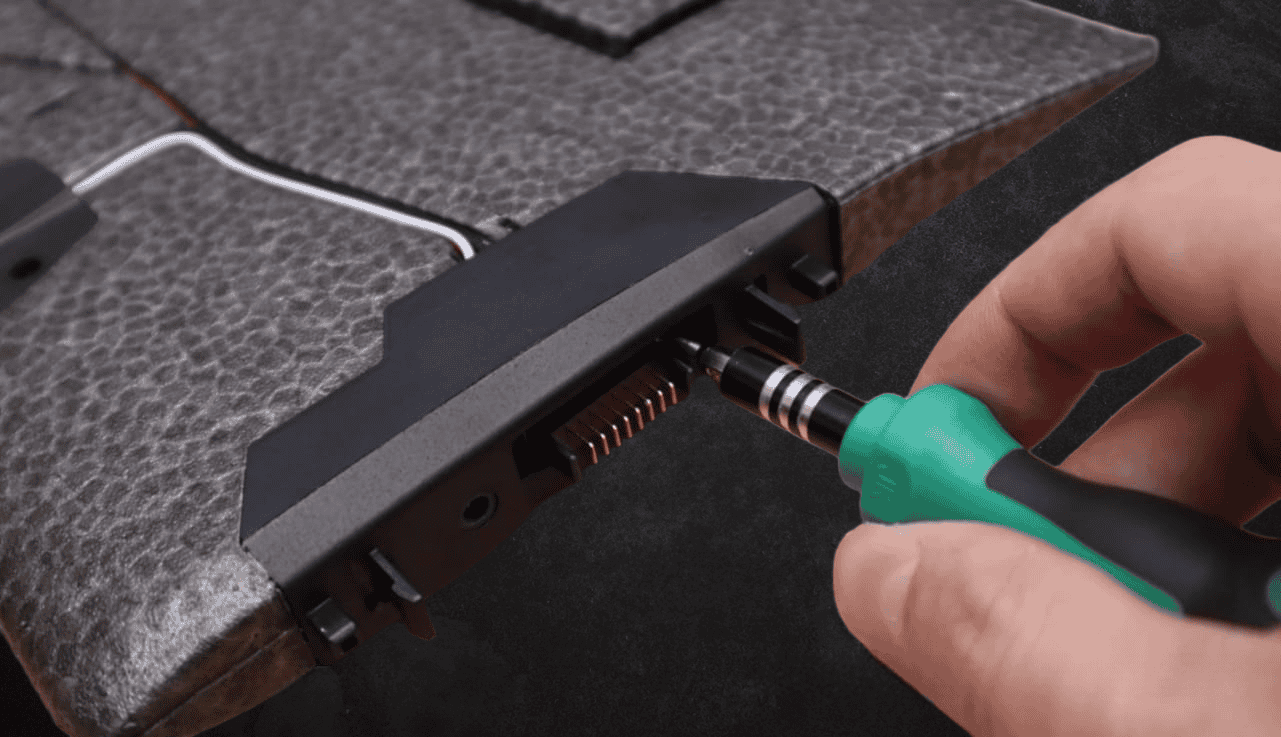
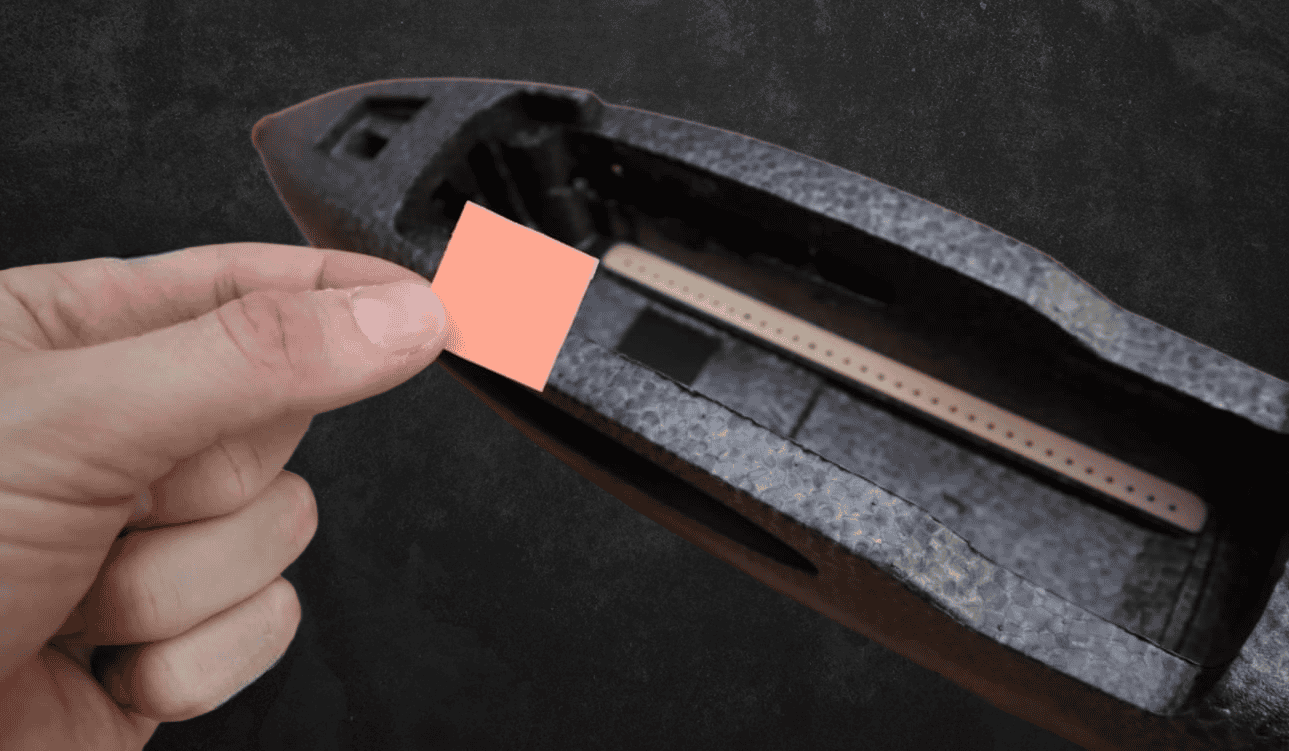
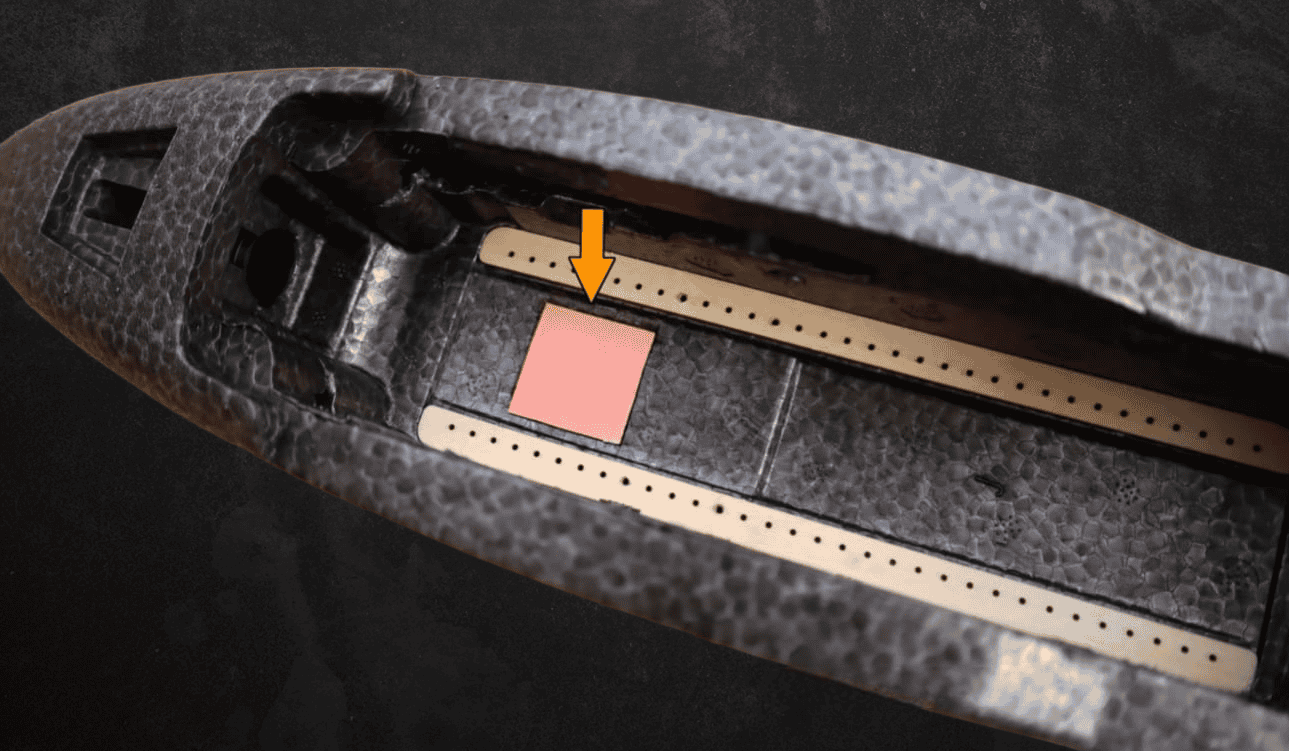
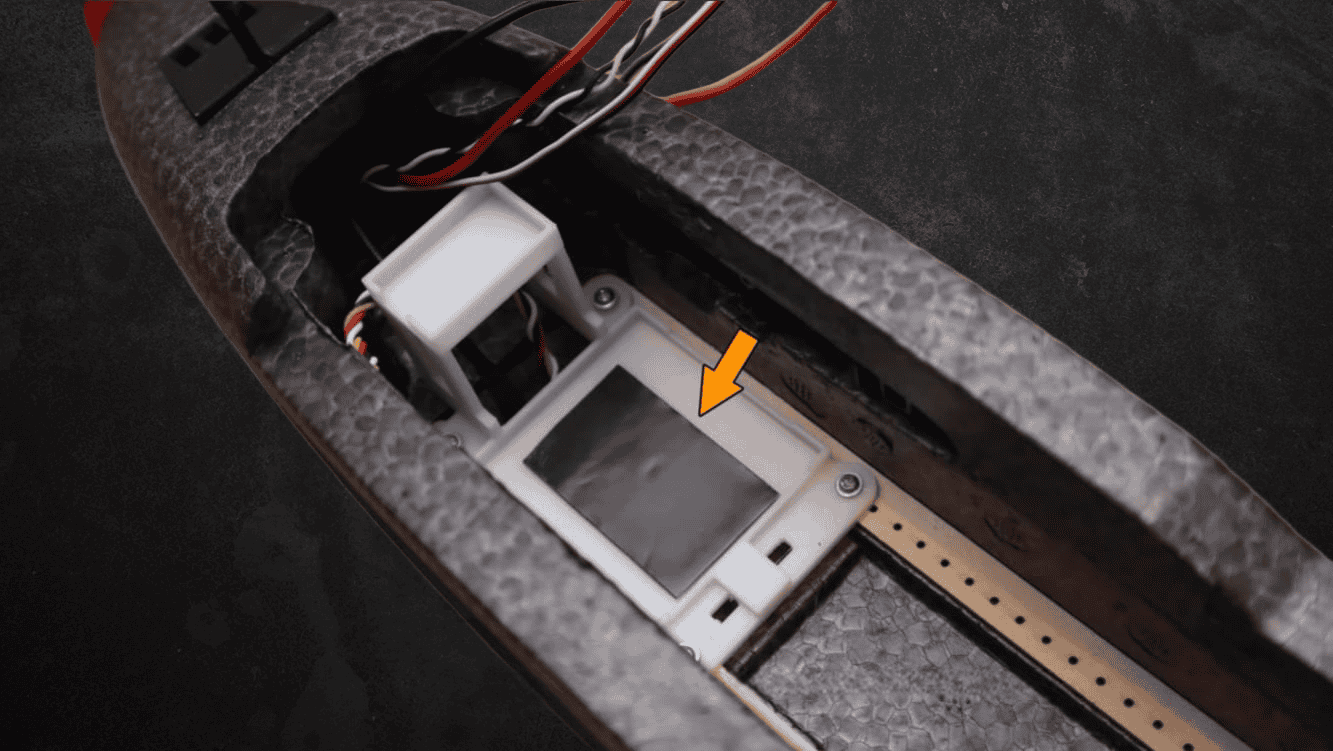
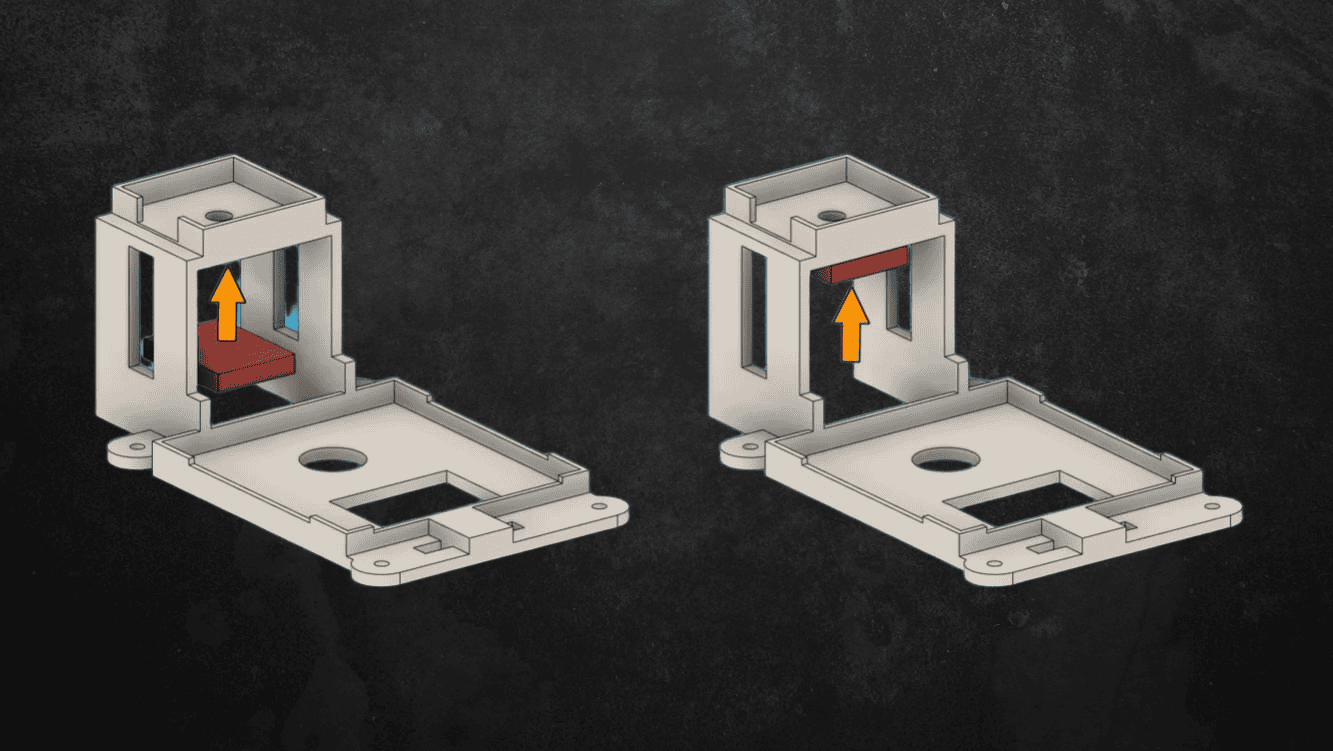
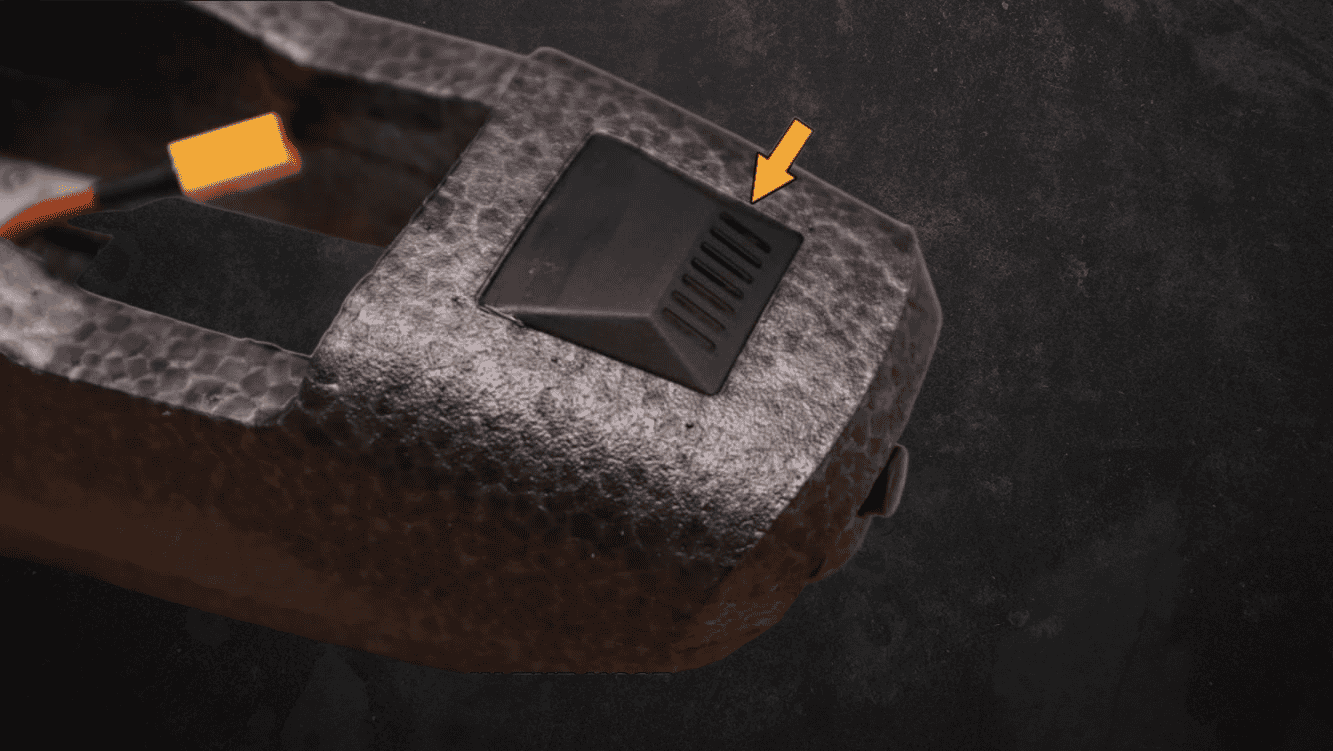
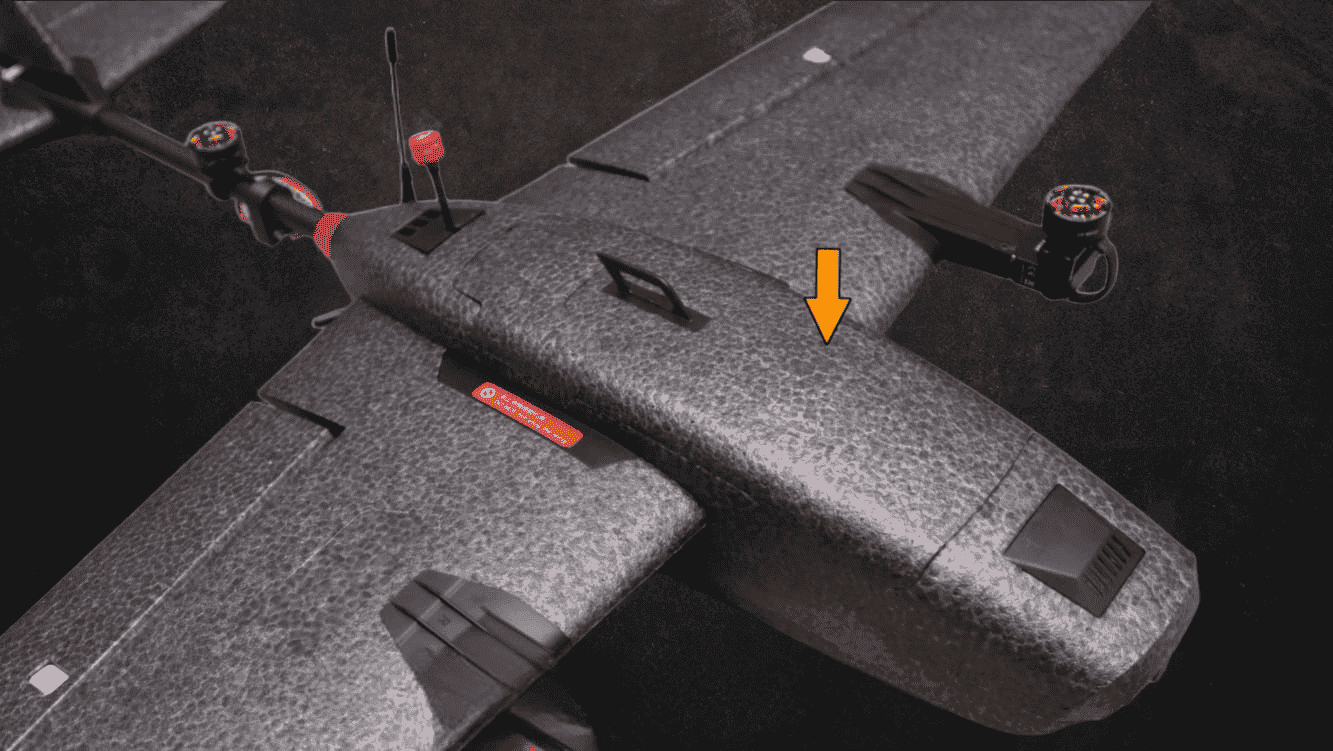
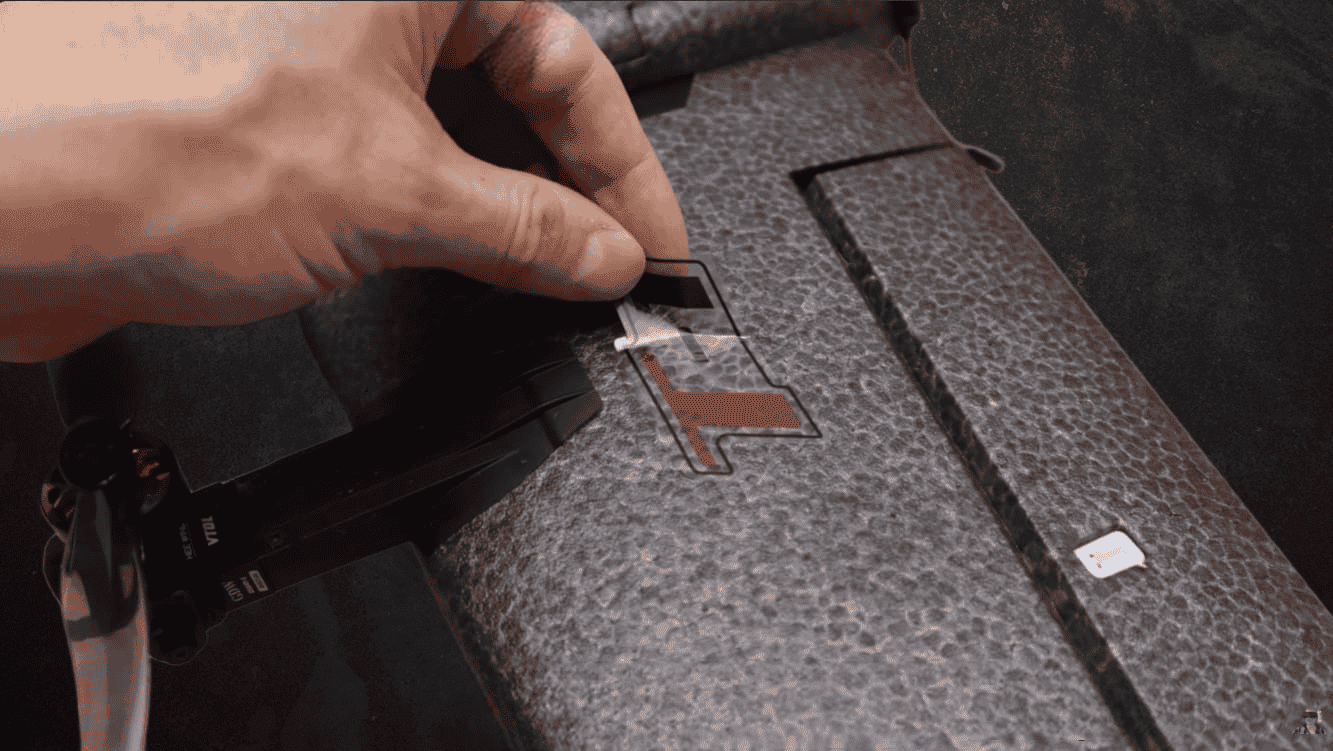
- В нижней части фюзеляжа, вокруг круглого выступа, нарисуйте квадрат 24x24 мм и аккуратно вырежьте пенопласт по этому контуру.
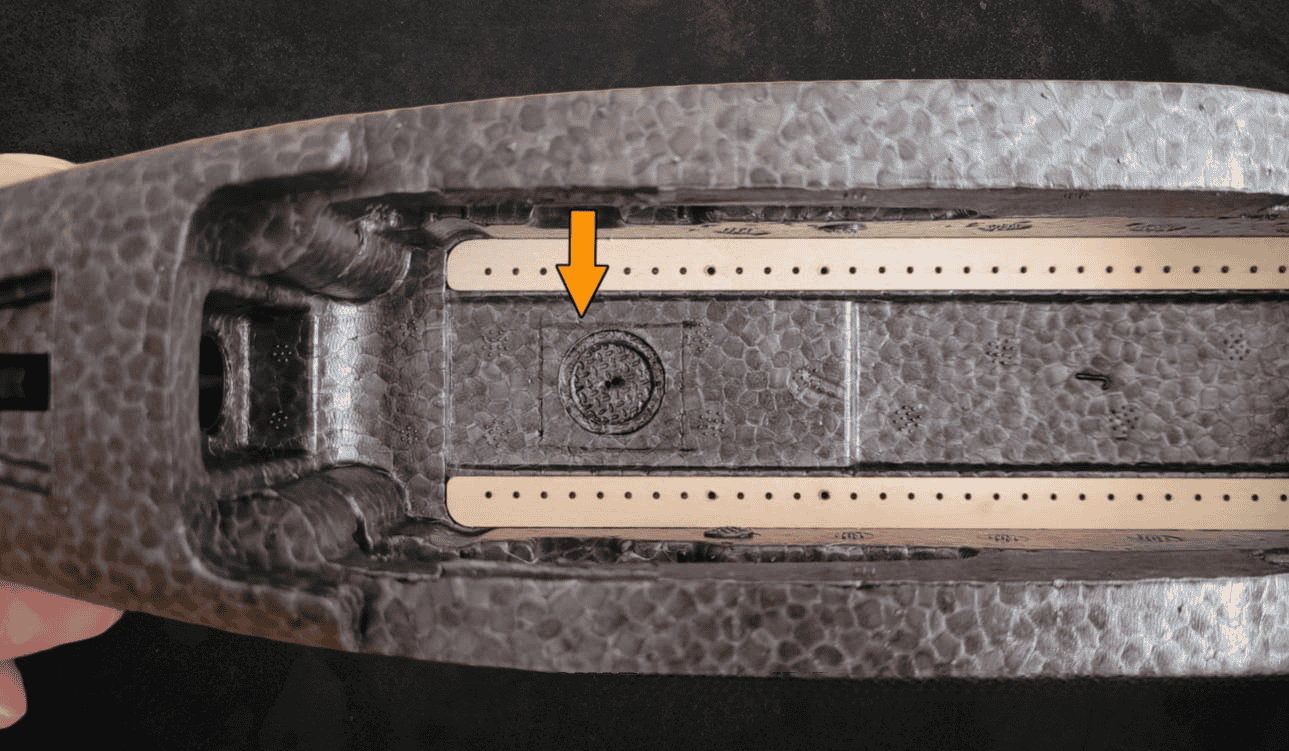

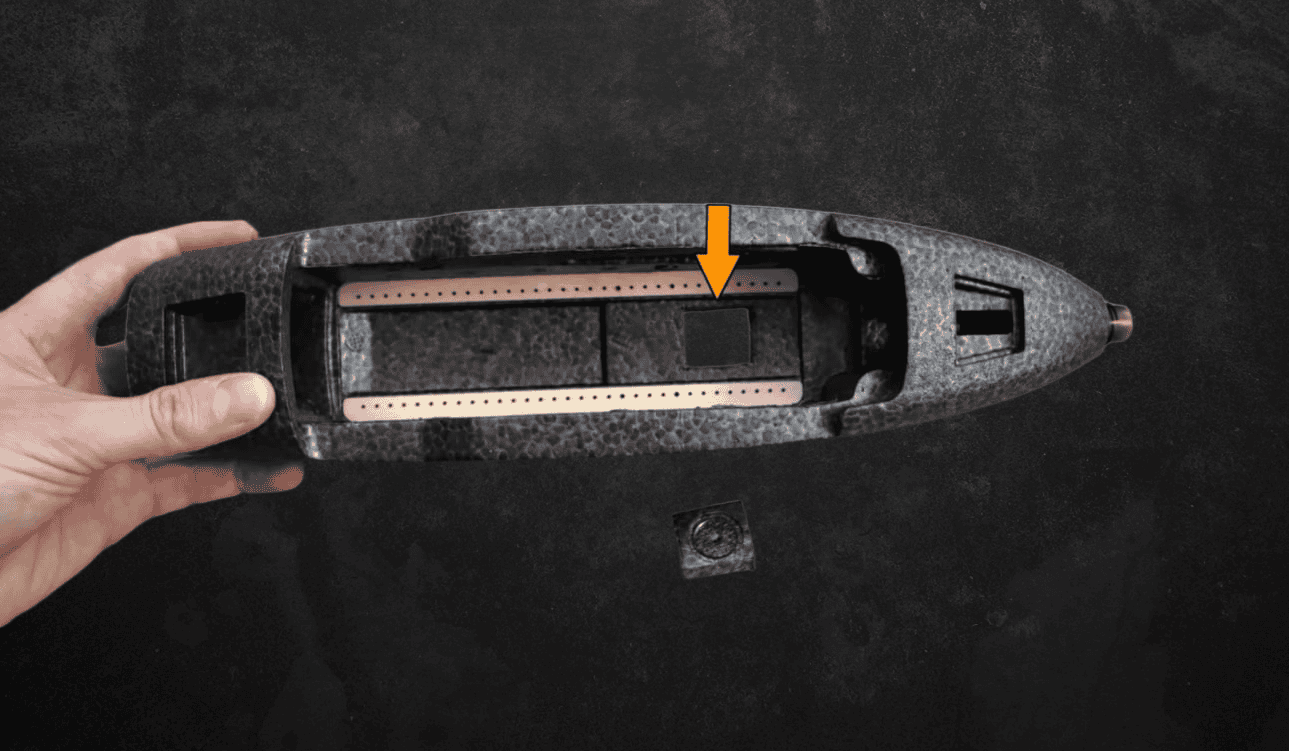
- Возьмите радиатор 25x25 мм и установите его в полученное отверстие вверх ногами.

- Наклейте на обратную сторону радиатора кусок термоленты 25x25 мм.
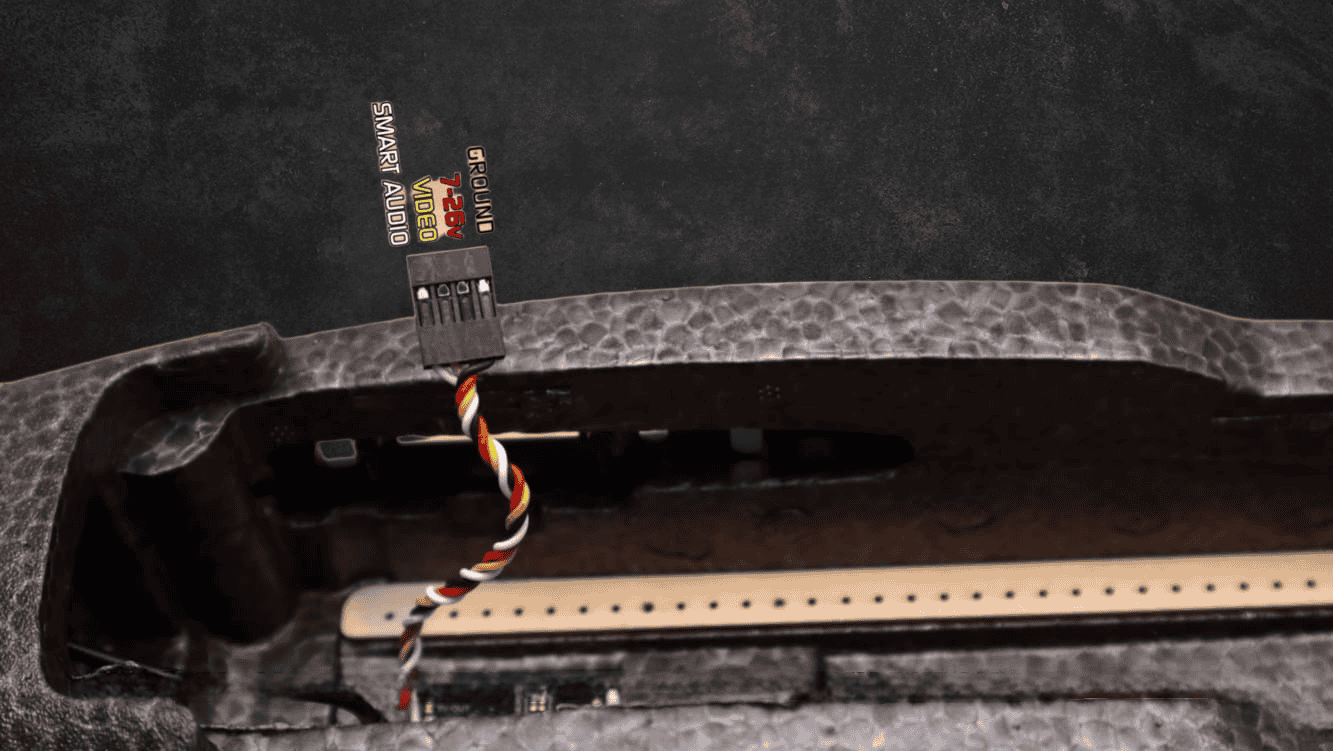
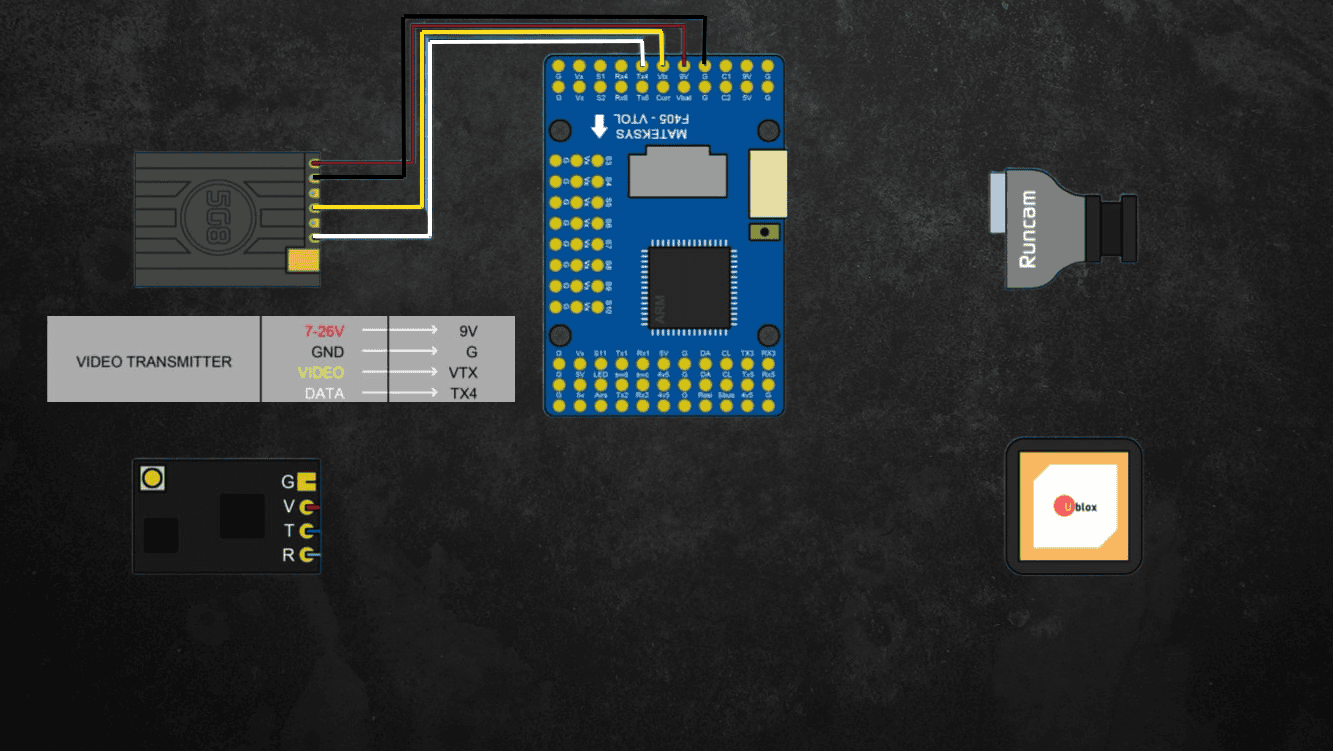
- Возьмите видеопередатчик (VTX) TBS Unify Pro Race 2 и припаяйте к нему 4 провода (Data, Video, GND, 7-25V).

- Приклейте VTX вверх ногами к радиатору с помощью термоленты.
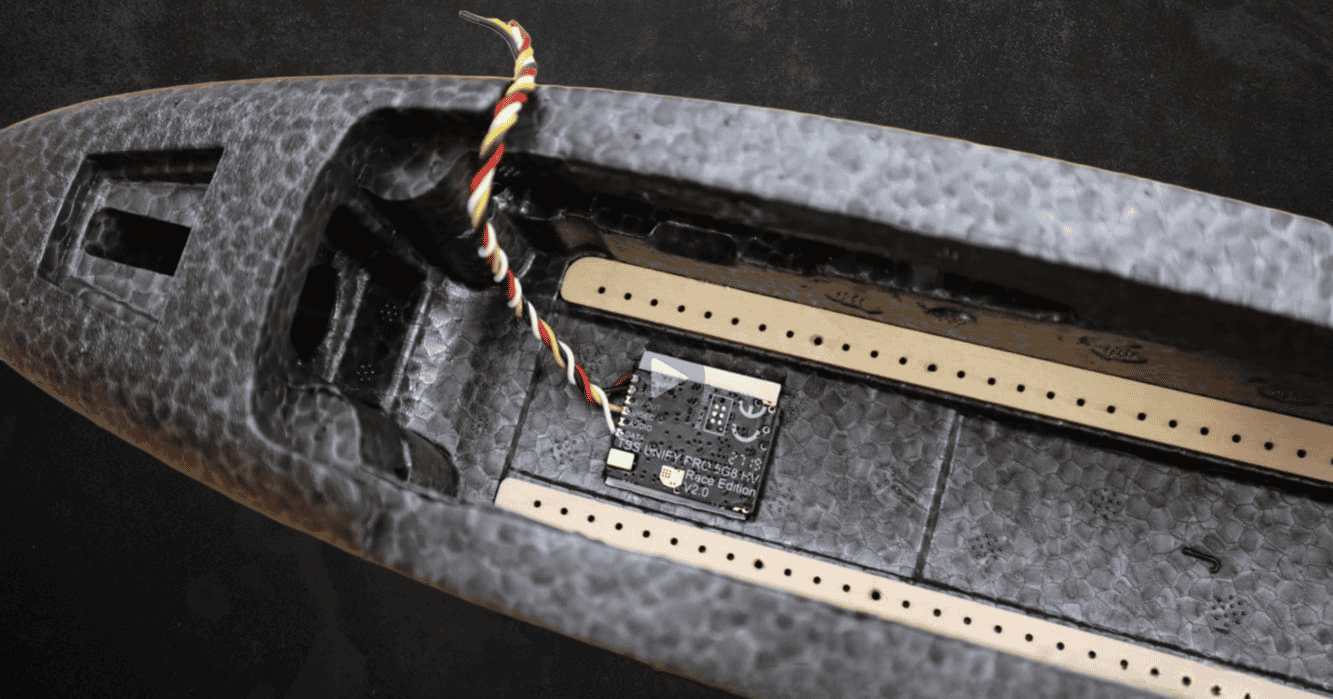
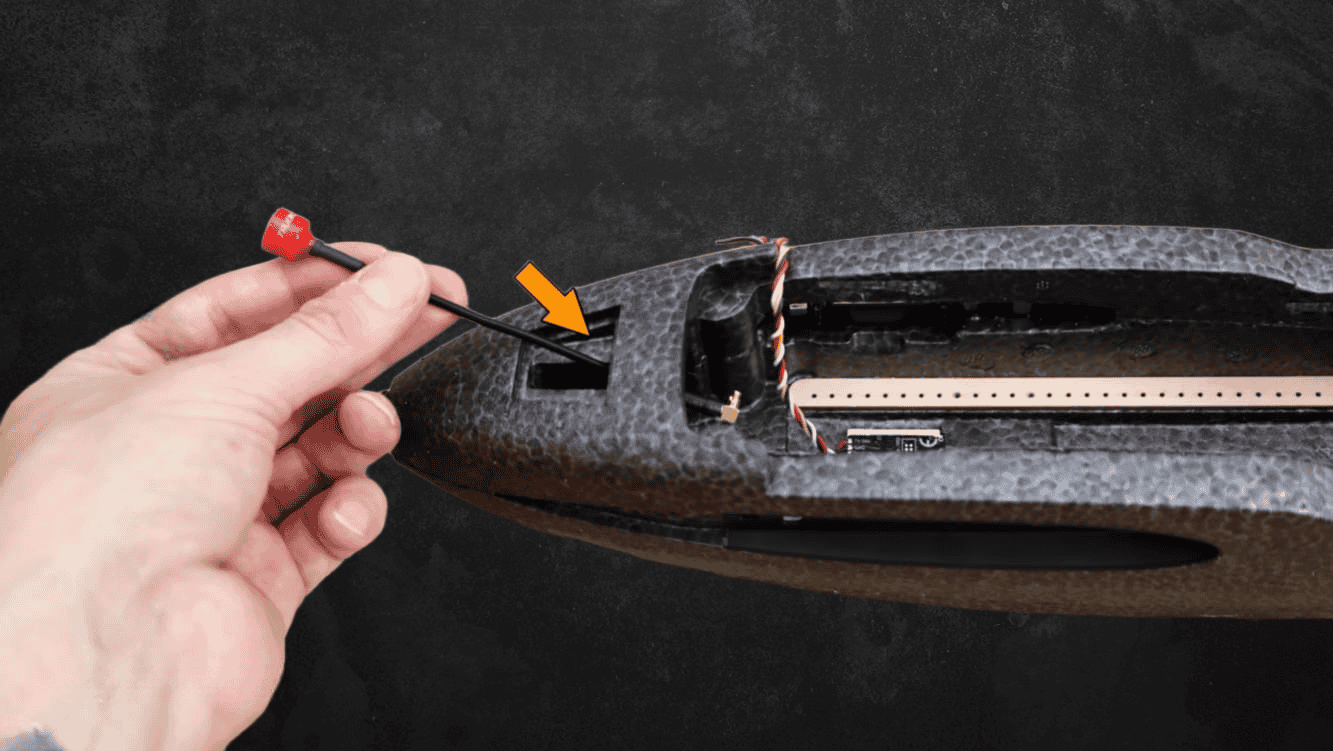
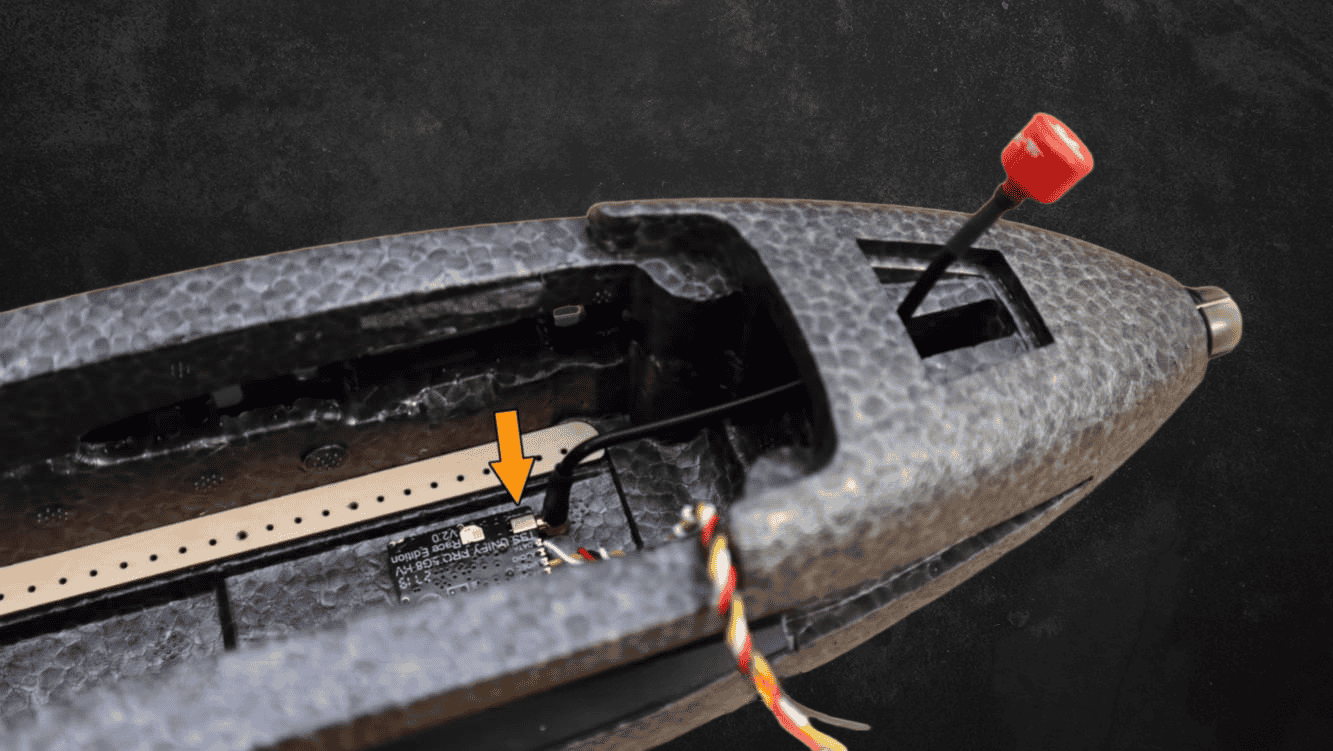
- Проденьте антенну через отверстие в задней части фюзеляжа и подключите ее к MMCX-разъему на VTX.
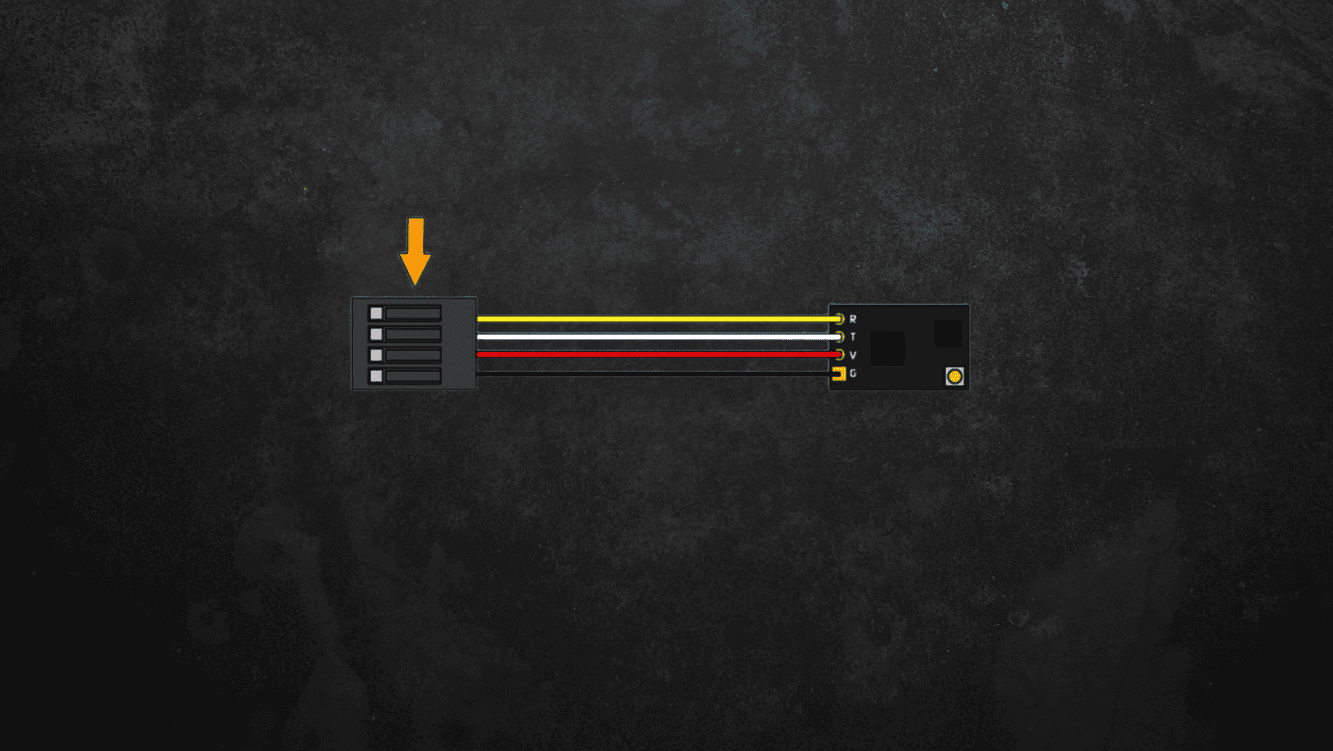
- Обожмите провода VTX и установите на них 4-пиновый коннектор Dupont.
- Установите 3D-печатную крышку на заднюю часть фюзеляжа, используя немного клея UHU POR.
- Проделайте отверстие в фюзеляже в указанном месте (для дальнейшего монтажа антенны приемника VRX, см. шаг 79).

- Наклейте кусок монтажной ленты Gorilla (20x25 мм) поверх VTX.
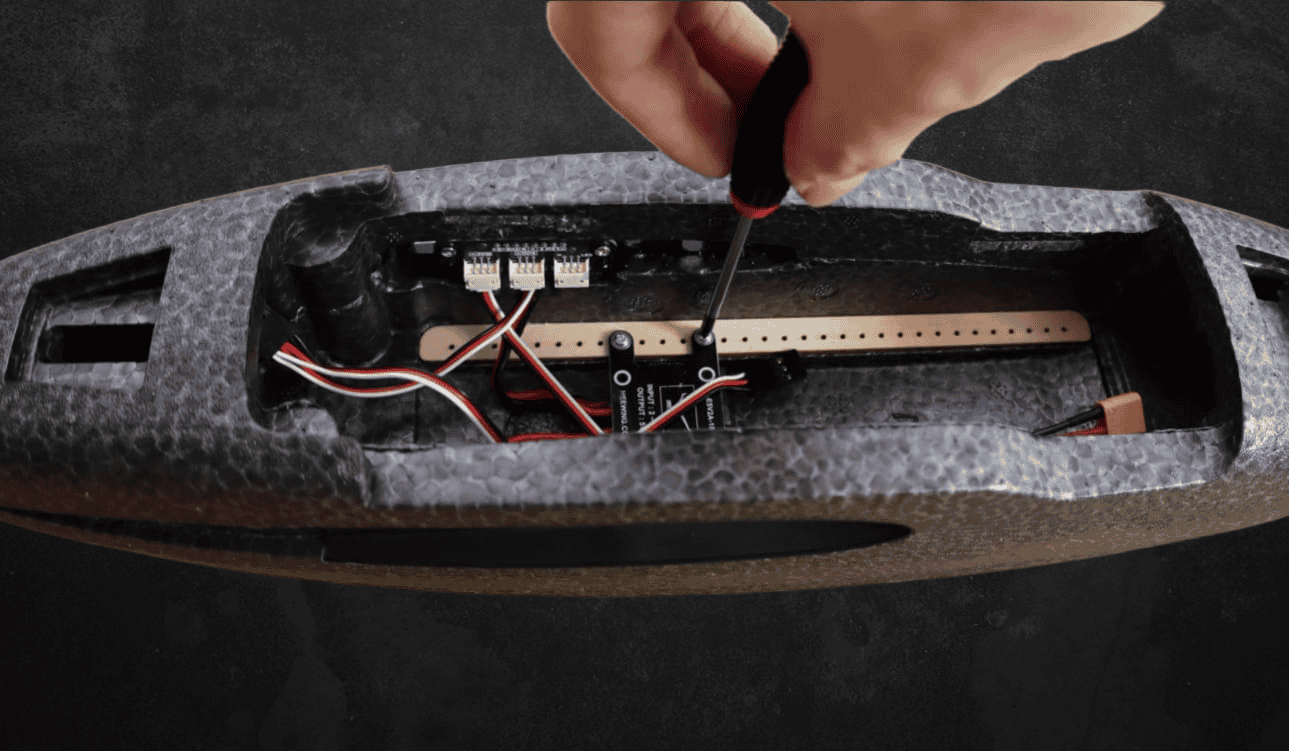
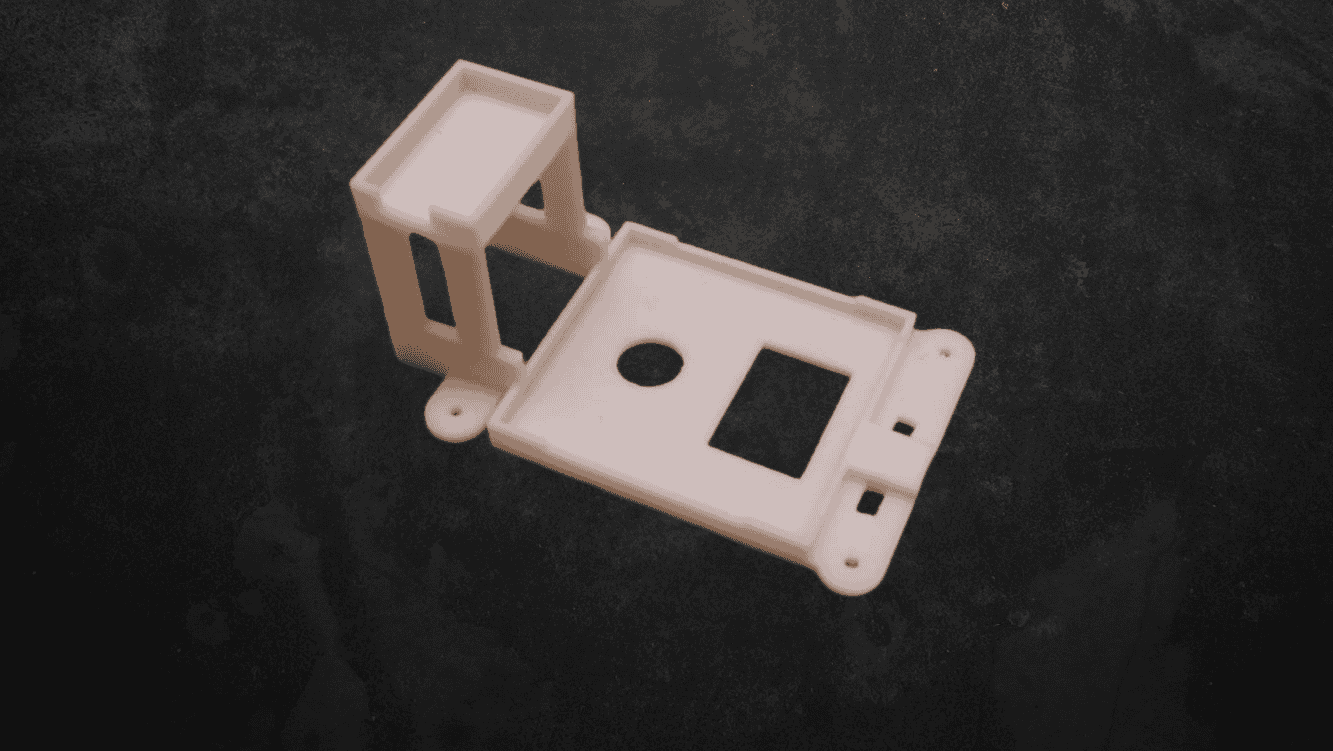
- Установите 3D-печатное крепление для полетного контроллера (FC) в фюзеляж, используя винты от PDB (с шага 48).
Этап 5: Подготовка и установка полетного контроллера (FC)
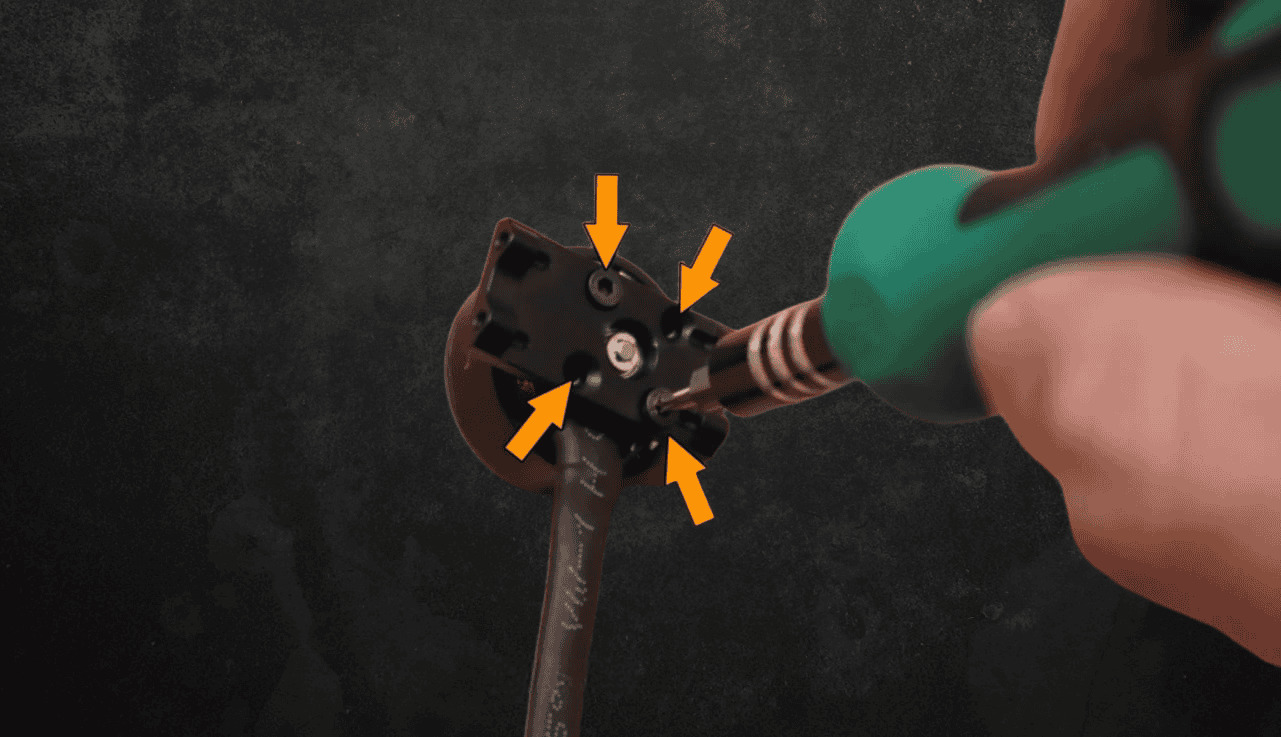
- Возьмите полетный контроллер Matek F405-VTOL и разберите его на две платы (верхнюю и нижнюю), открутив 4 винта.
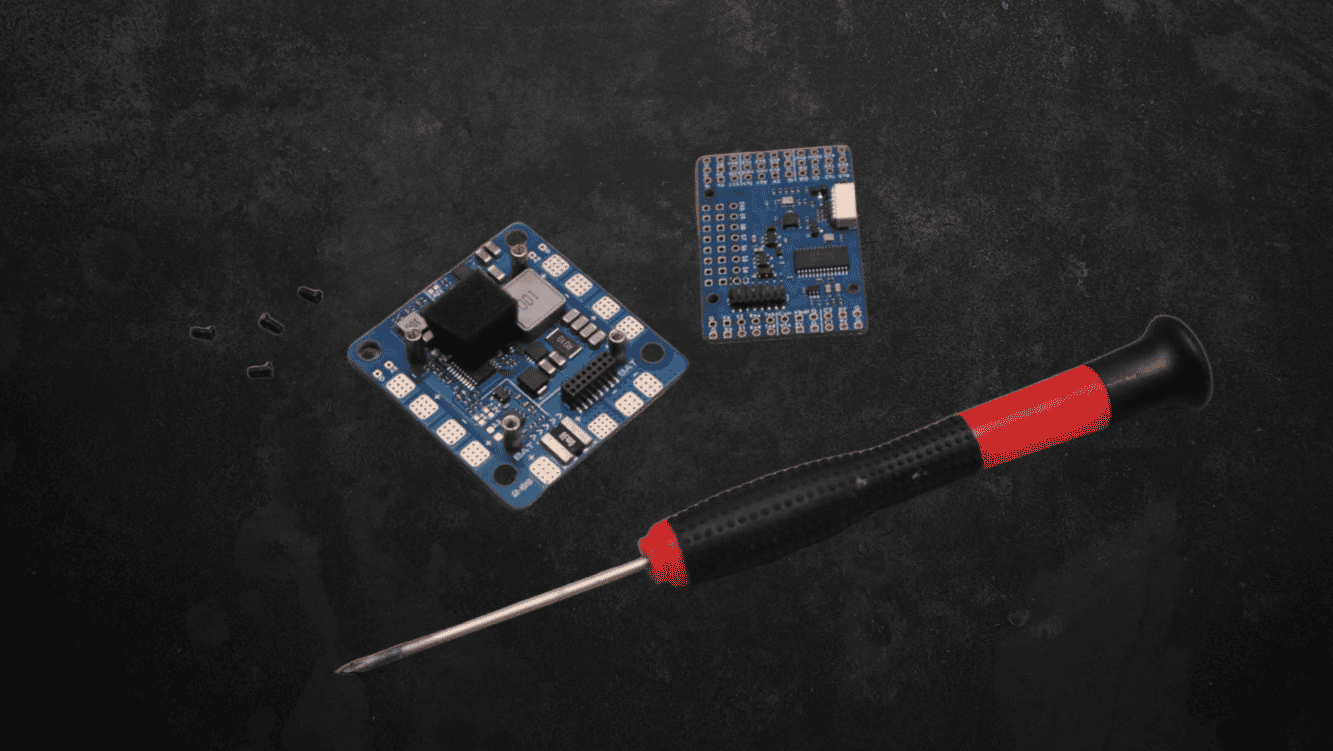
- Припаяйте штыревые разъемы (pin headers) к верхней плате.
Внимание. Для практических полетов рекомендуется ПРИПАИВАТЬ все силовые и сигнальные кабели к контроллеру непосредственно к контактным площадкам и не использовать указанные ниже разъемы. При использовании разъемов контакты в них могут быть не надежными. Это может привести к потери сигнала или питающего напряжения. Не используйте подобное соединение если не хотите потерять самолет. Информация ниже приводится только для наглядности и для учебных целей.

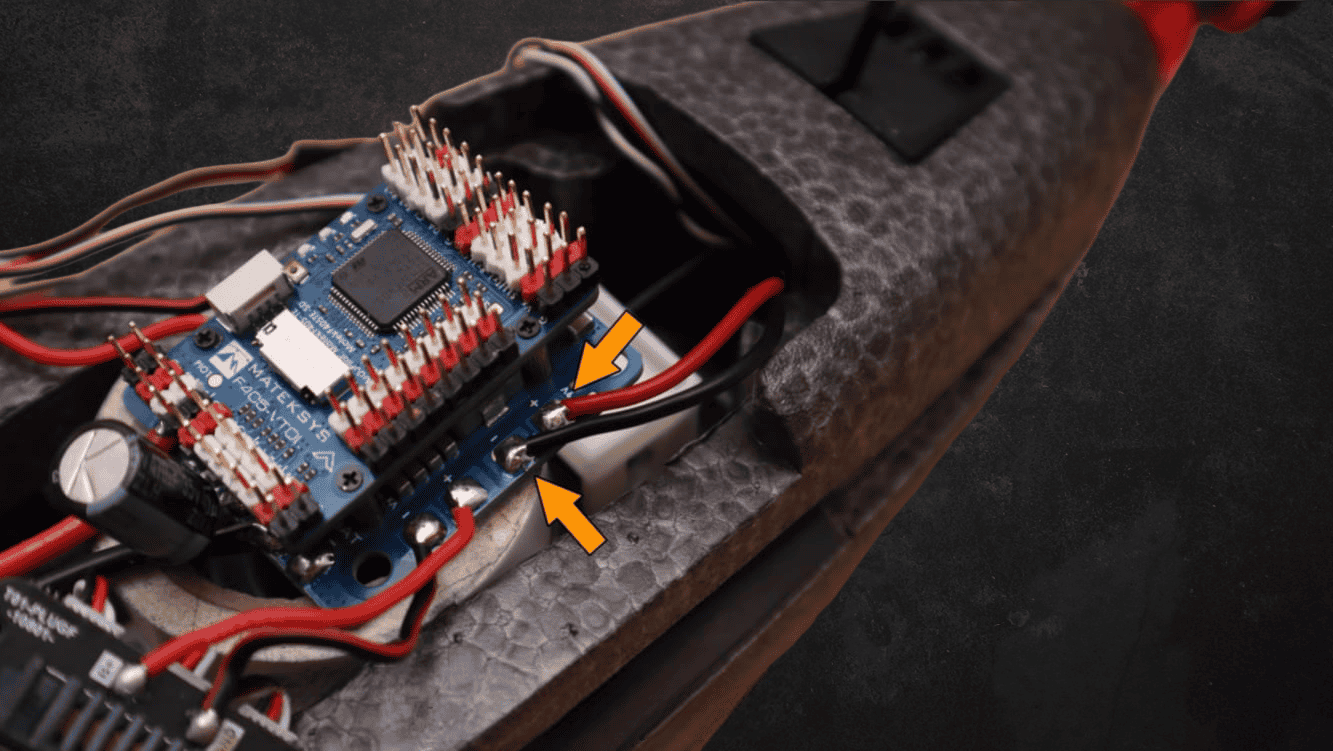
- Припаяйте провод XT60 и конденсатор (из комплекта FC) к нижней плате.
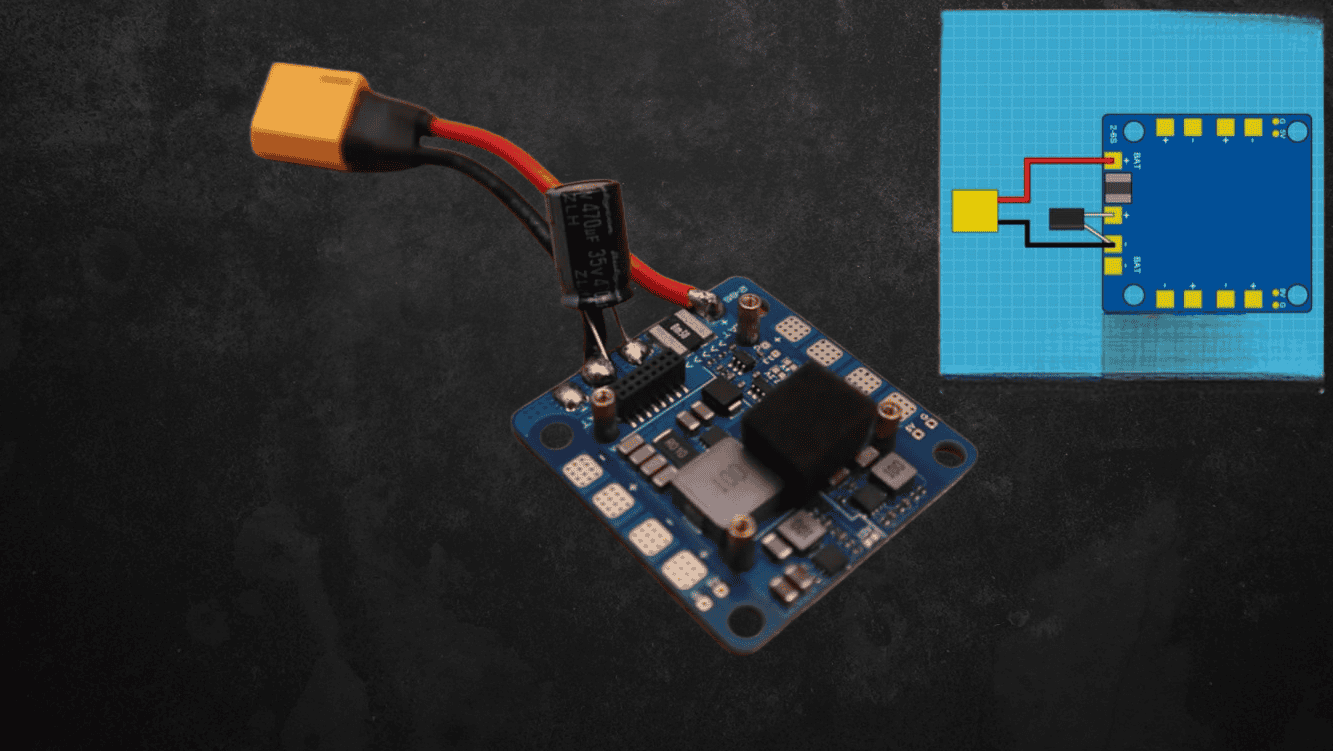
- Соберите полетный контроллер обратно.
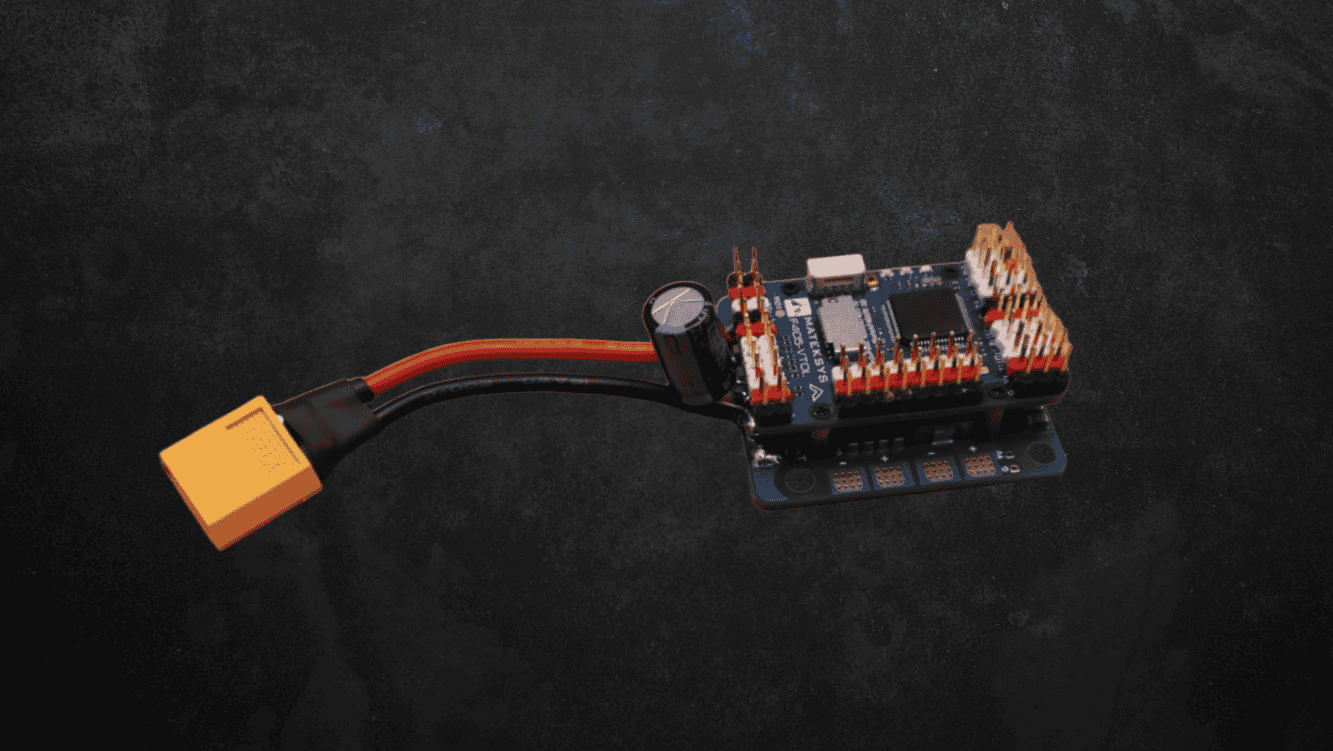
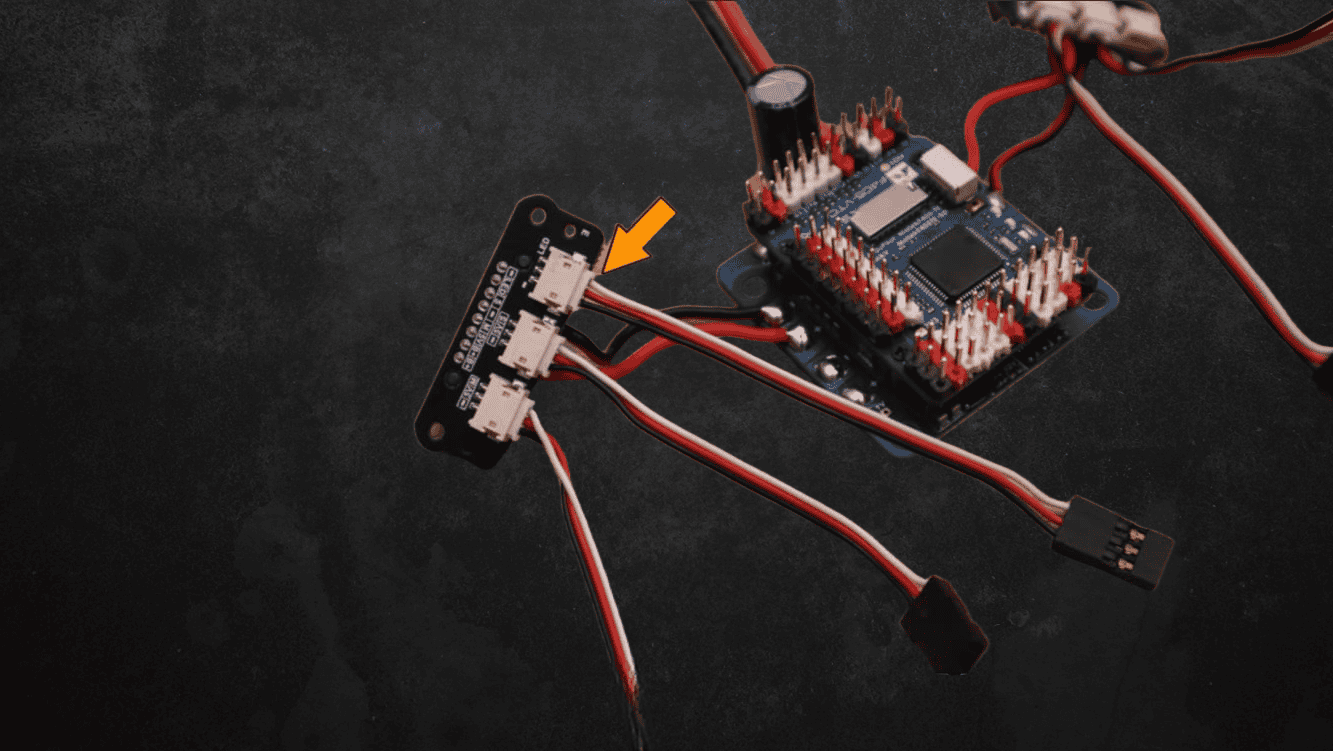
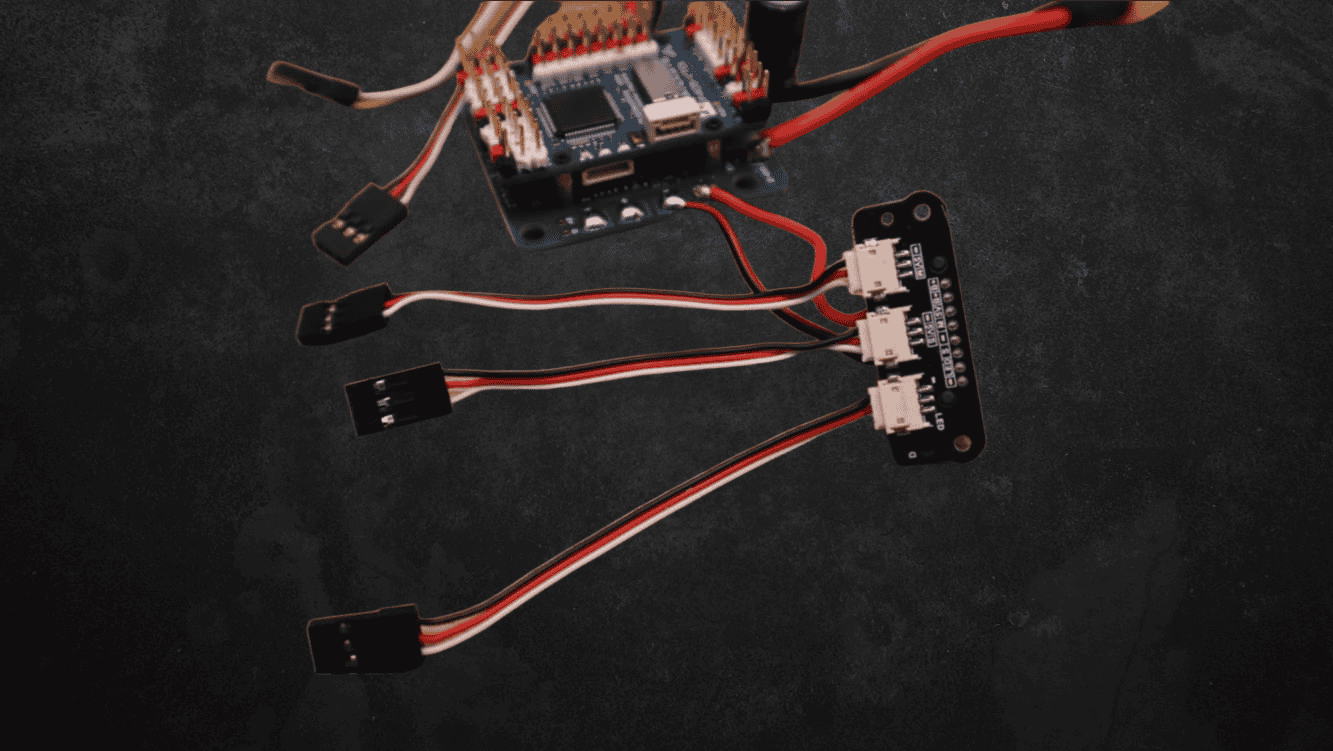
- Припаяйте быстросъемные коннекторы к полетному контроллеру.

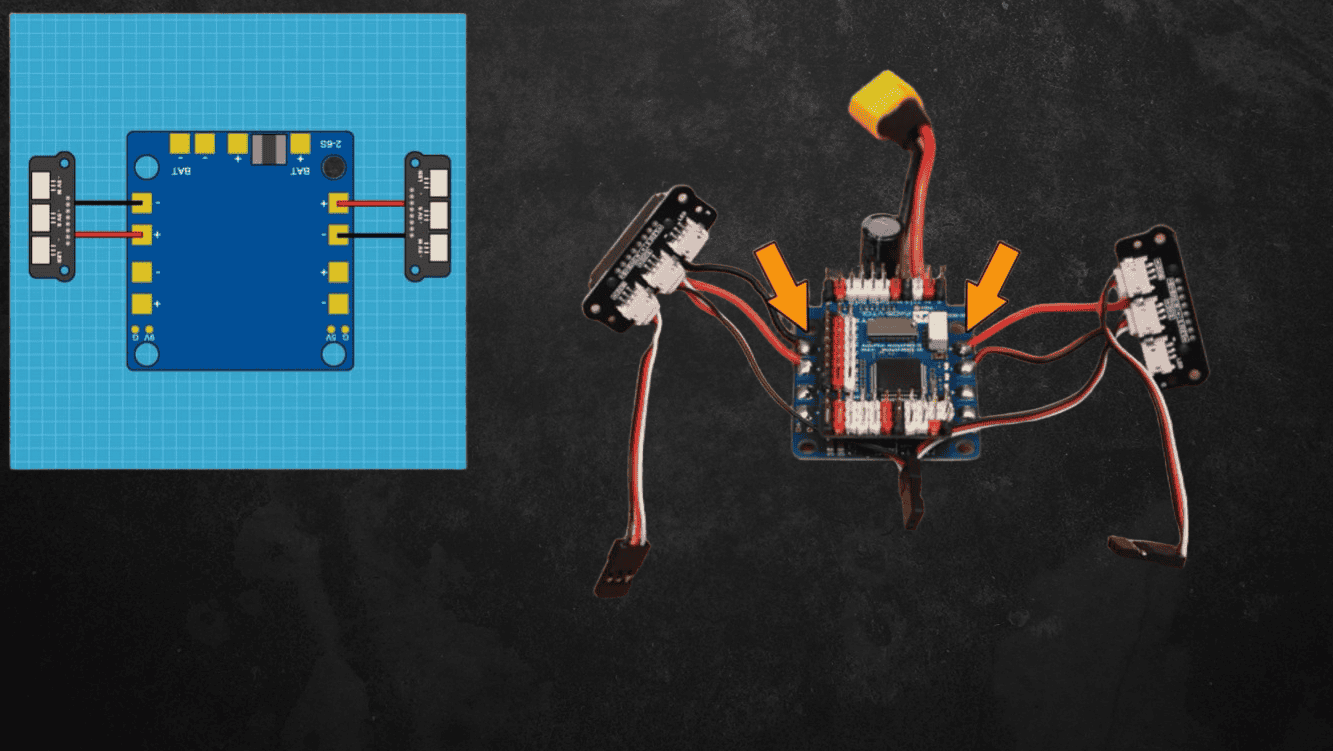
- Найдите объединенный провод элеронов (подключен к разъему "S" на быстросъемных коннекторах). Отрежьте разъем Dupont, чтобы получить два отдельных провода.
- Обожмите эти провода и установите на них 3-пиновый коннектор Dupont.
- Возьмите 2 провода из VTOL-комплекта и подключите один к разъему "LED" на левом быстросъемном коннекторе, а другой — на правом.

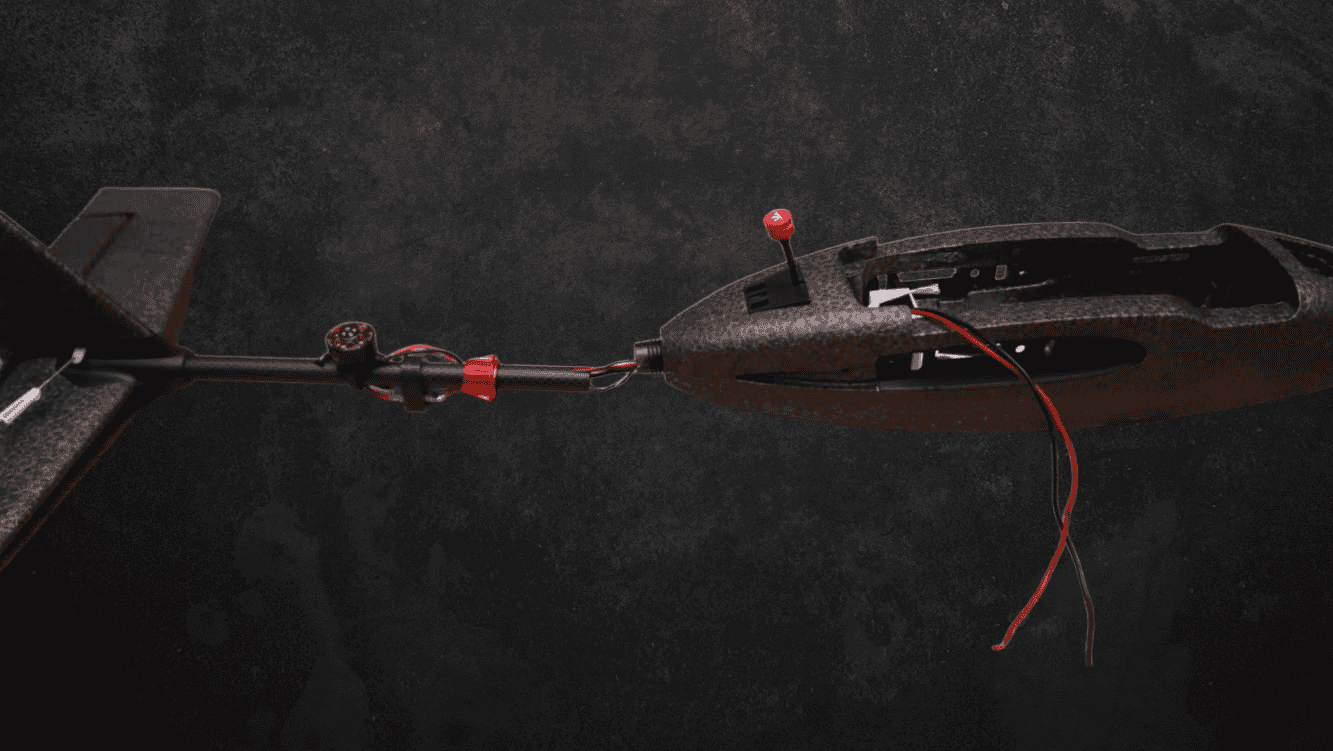
- Наденьте гайку (из PNP-комплекта) на хвостовую балку.

- Проденьте провода от хвоста через трубку в фюзеляже, а затем вставьте саму хвостовую балку в трубку. Зафиксируйте ее, затянув гайку.
- Наклейте кусок монтажной ленты Gorilla (40x25 мм) на крепление полетного контроллера.
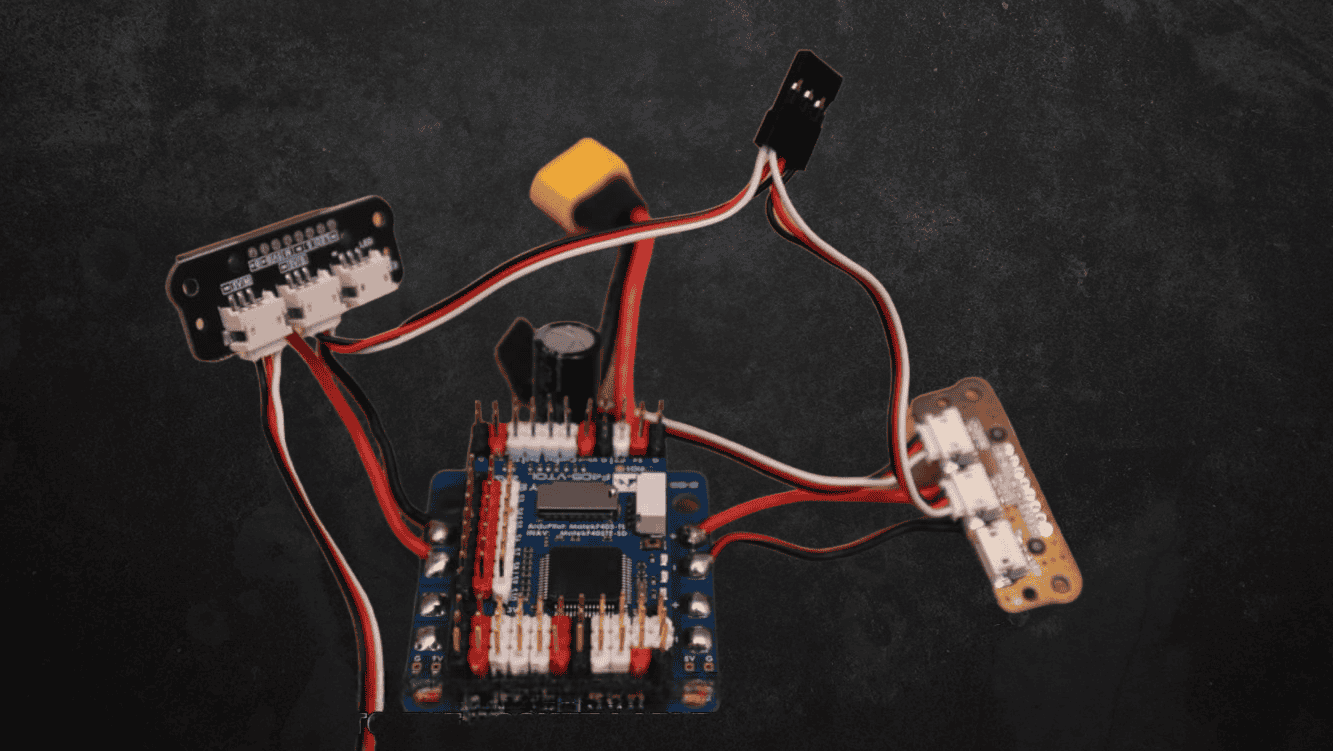
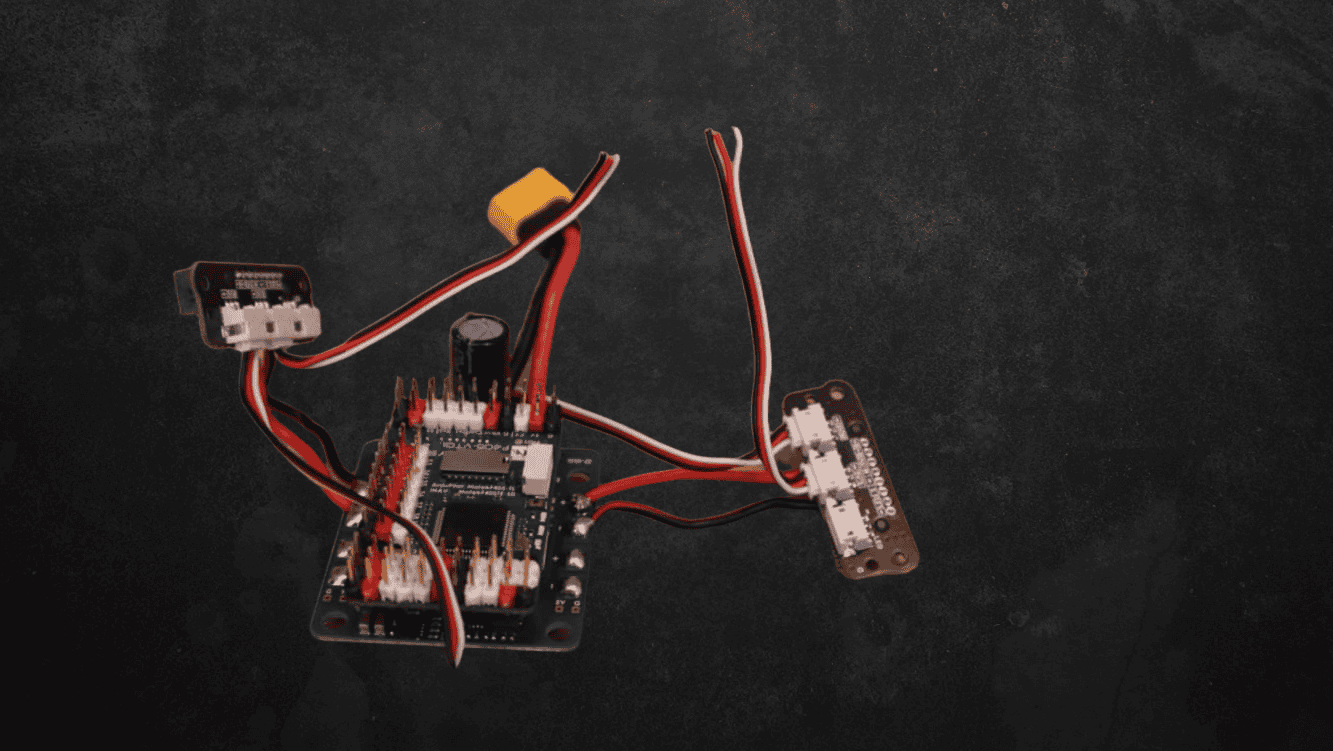
- Определите и укоротите силовые провода (VBAT+ и GND-) от хвостового ESC, затем припаяйте их к полетному контроллеру.
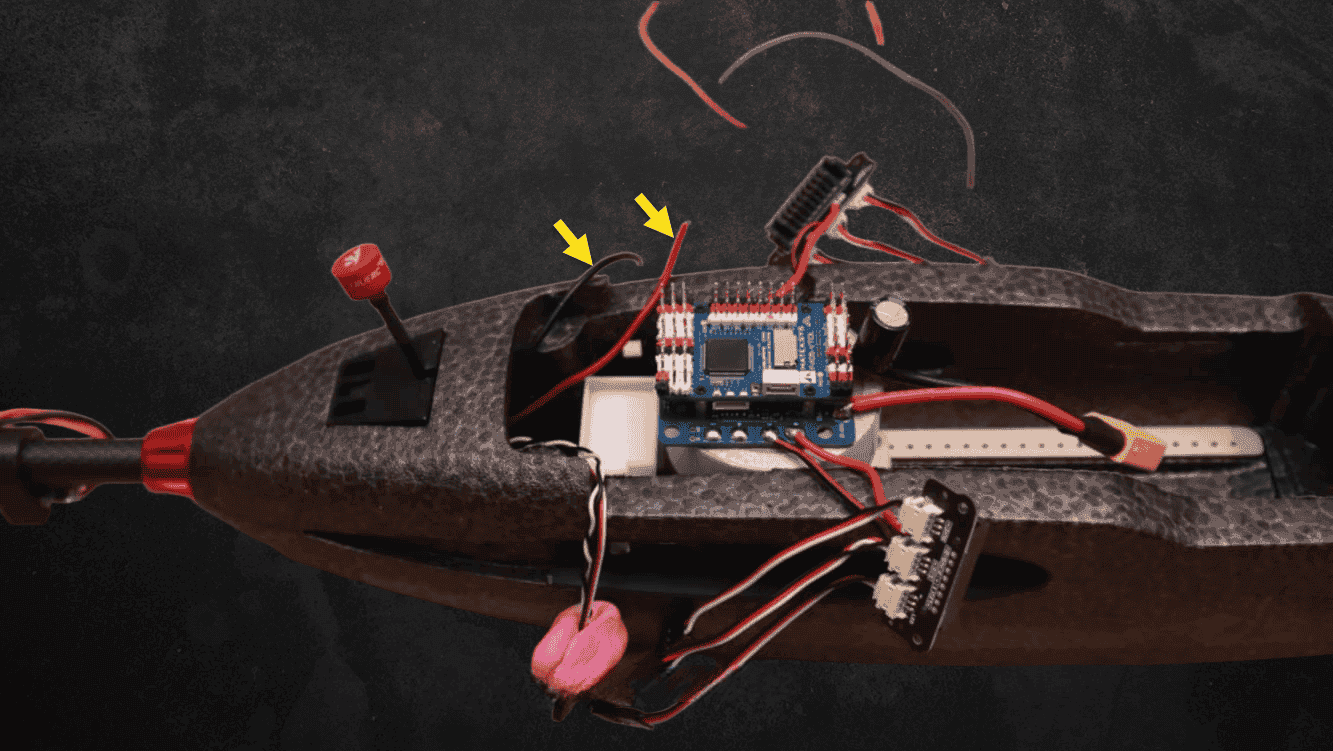
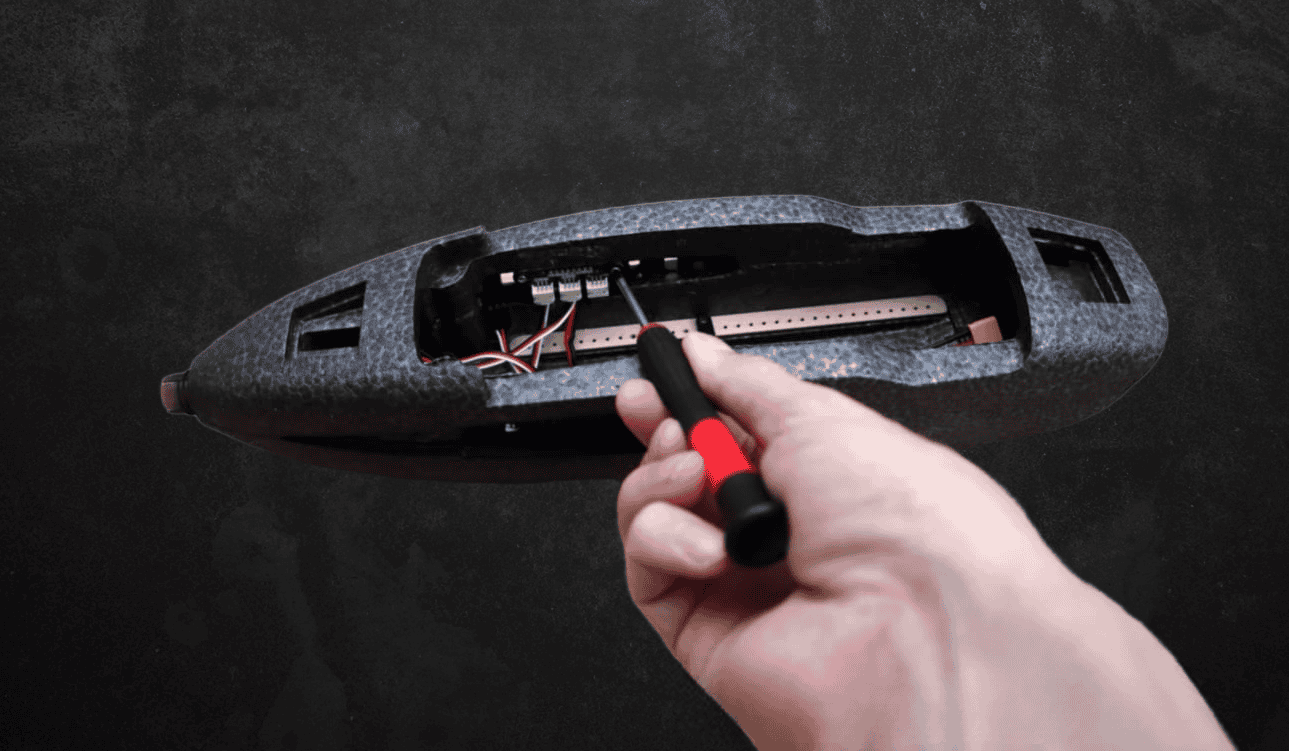
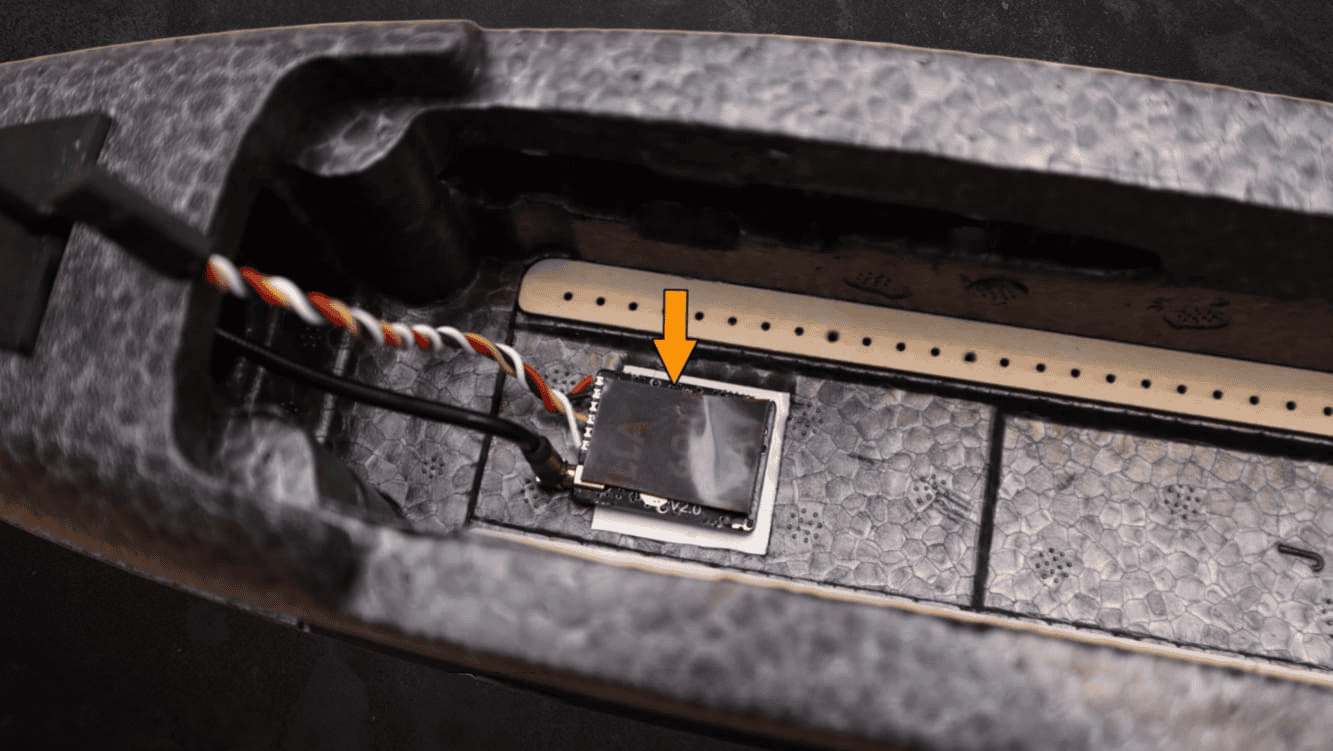
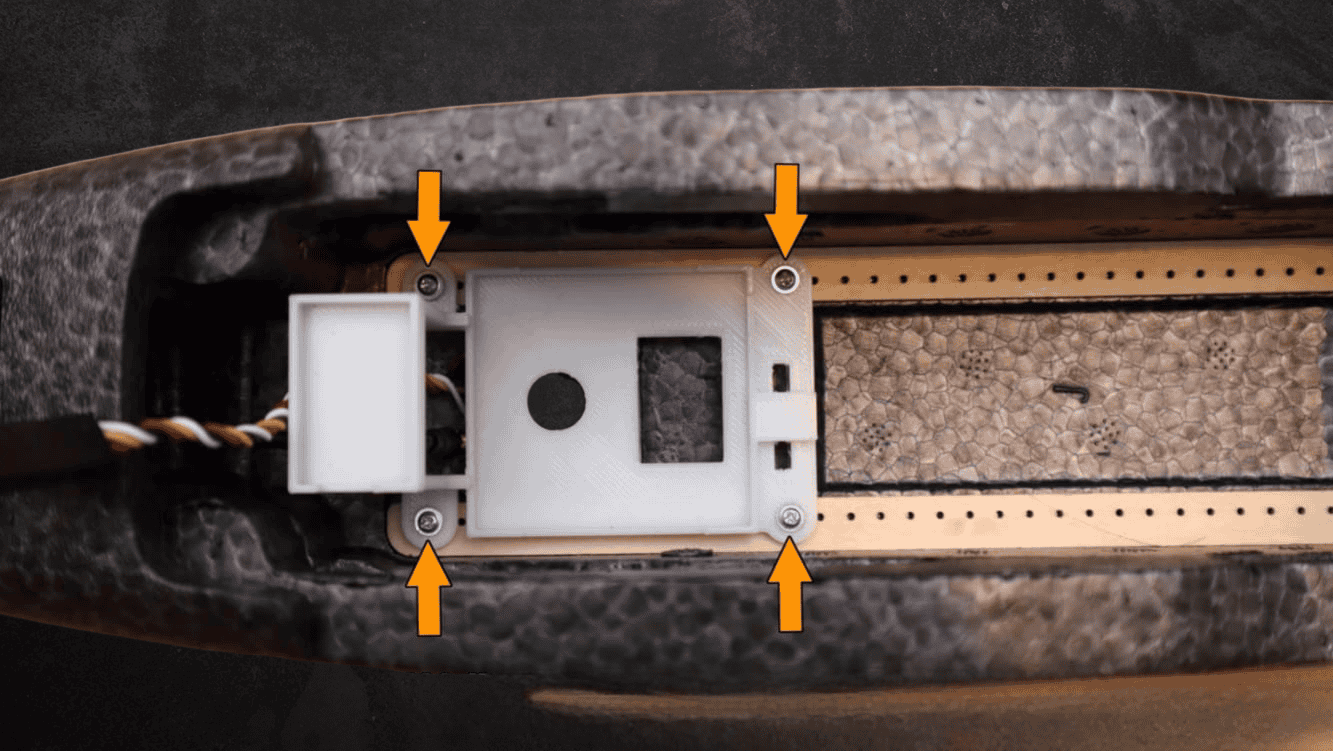
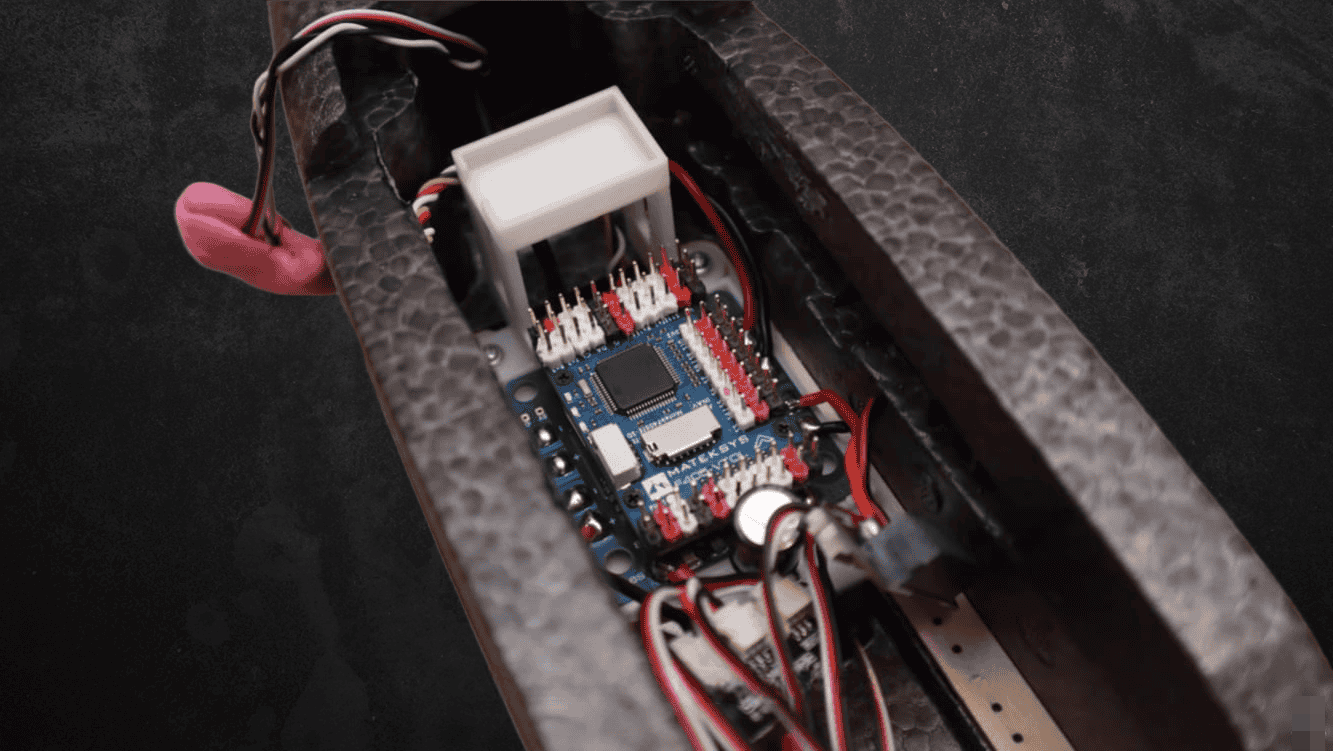
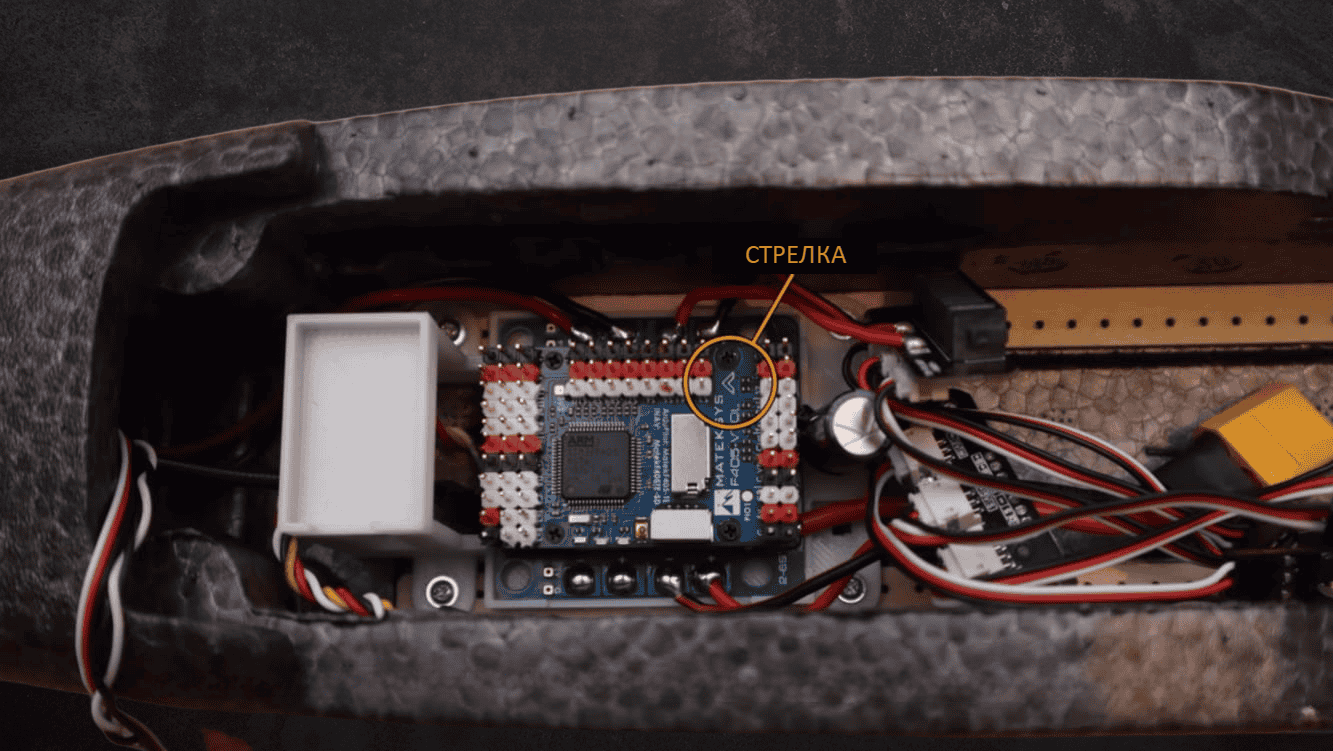
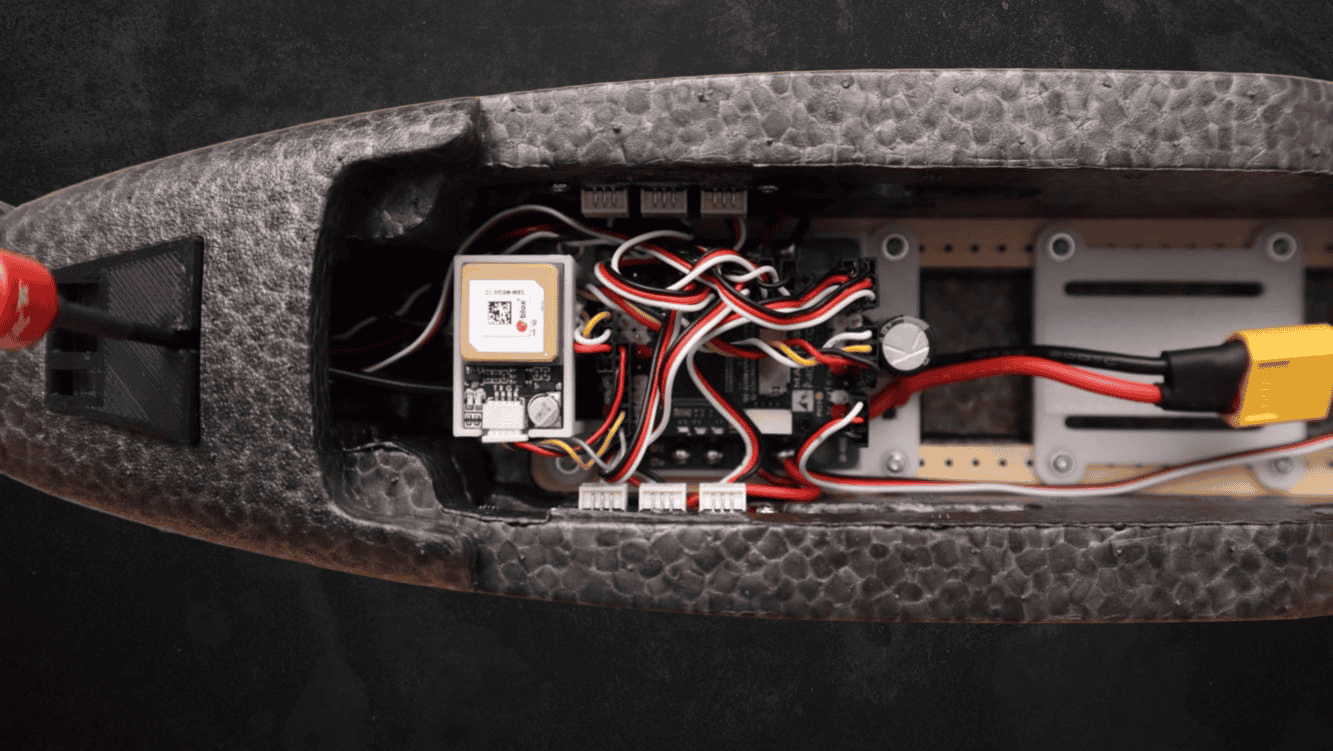
- Осторожно опустите полетный контроллер в фюзеляж и установите его на крепление. Стрелка на контроллере должна быть направлена на хвост самолета.
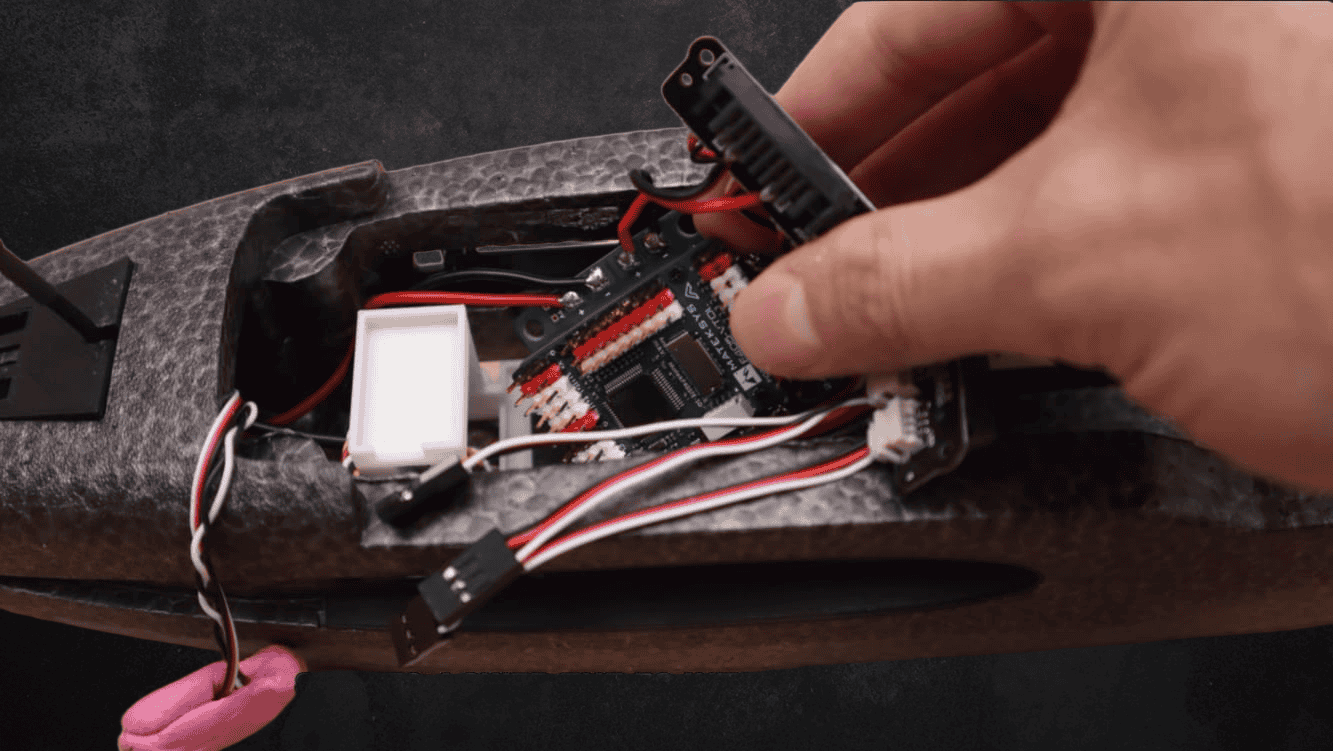
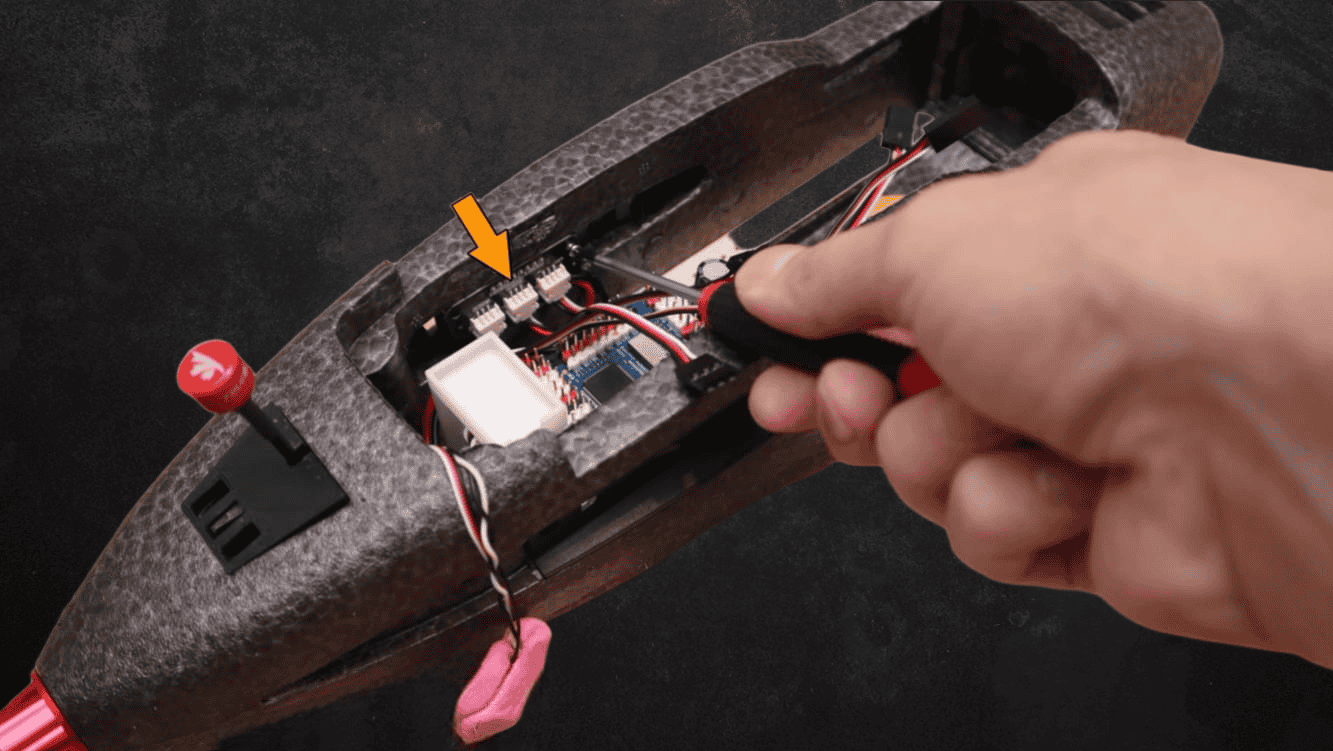
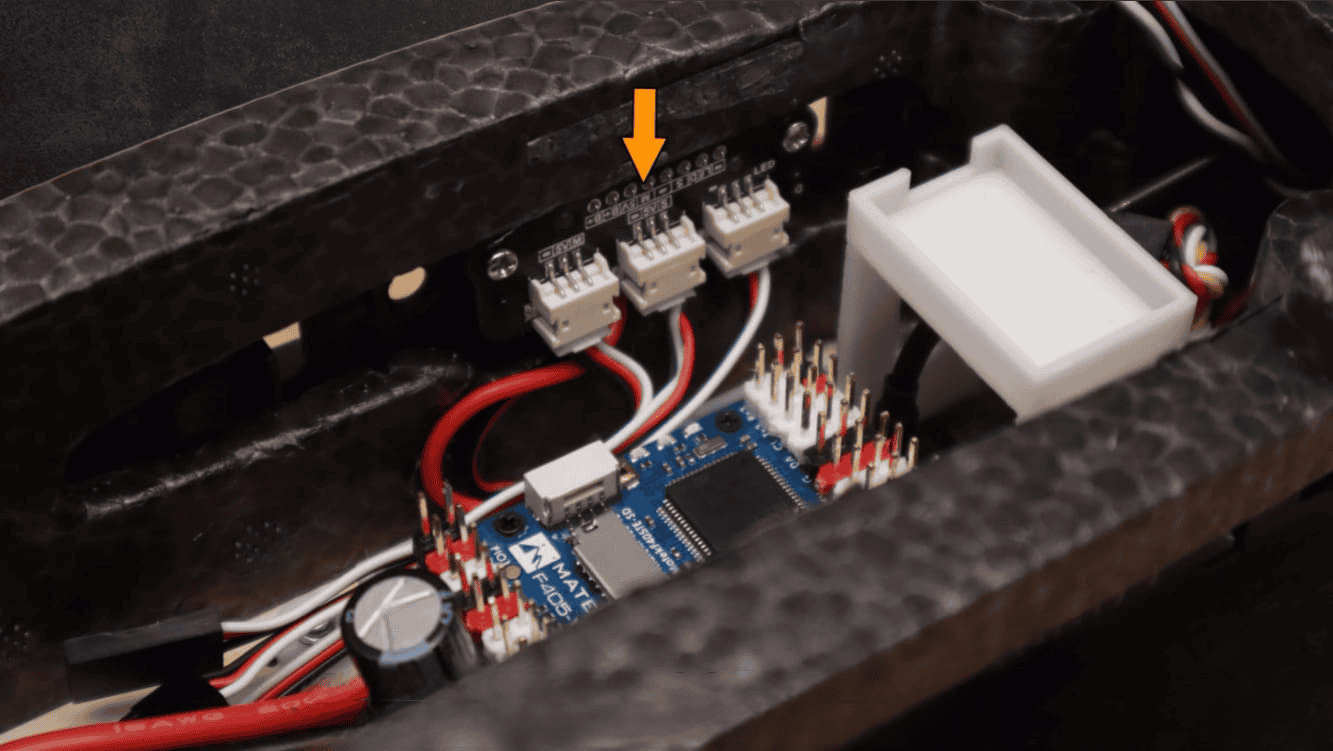
- Установите на место левый и правый быстросъемные коннекторы, используя винты, снятые на шаге 49.
- Проденьте провода от VTX через зазор под креплением GPS.
- Найдите сигнальные провода ESC (установленные на шаге 37), обожмите их и установите 3-пиновый коннектор Dupont.


Этап 6: Установка GPS, приемника и камеры
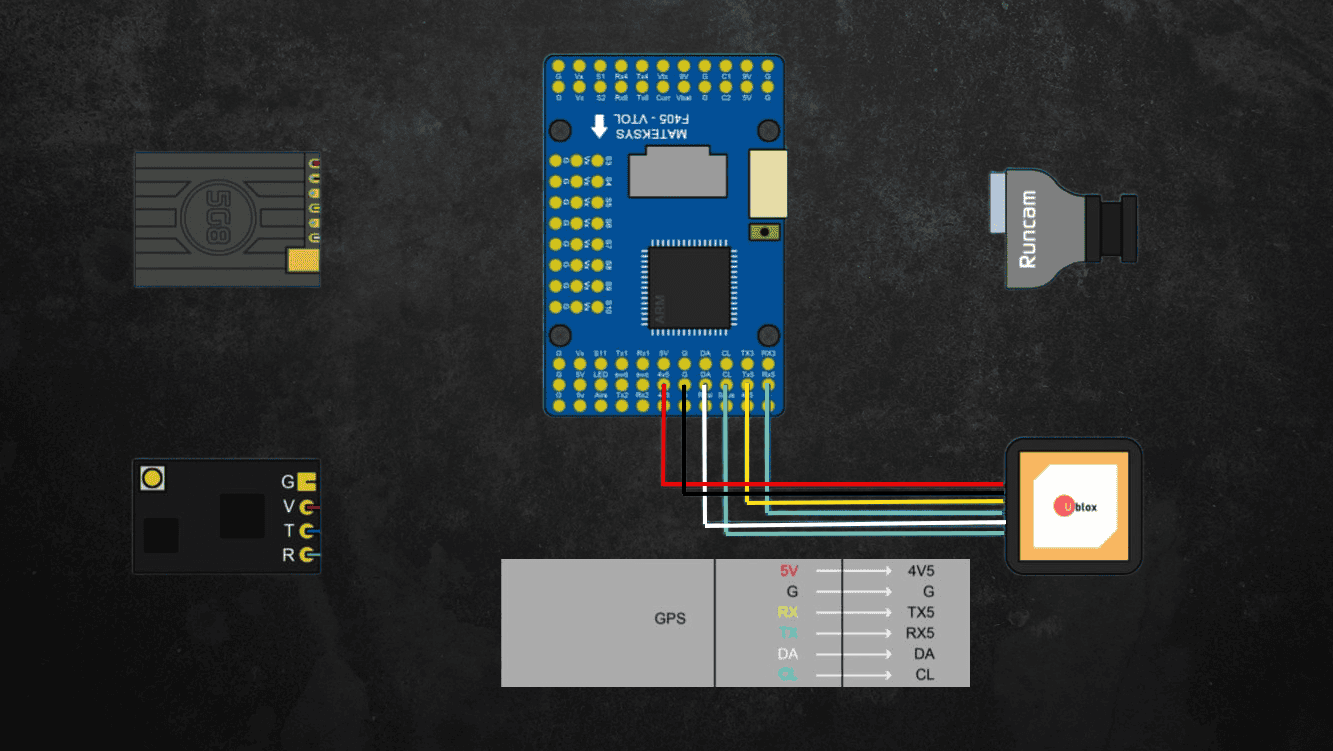
- Возьмите GPS-модуль Matek M8Q-5883 и укоротите его провода до ~6 см.
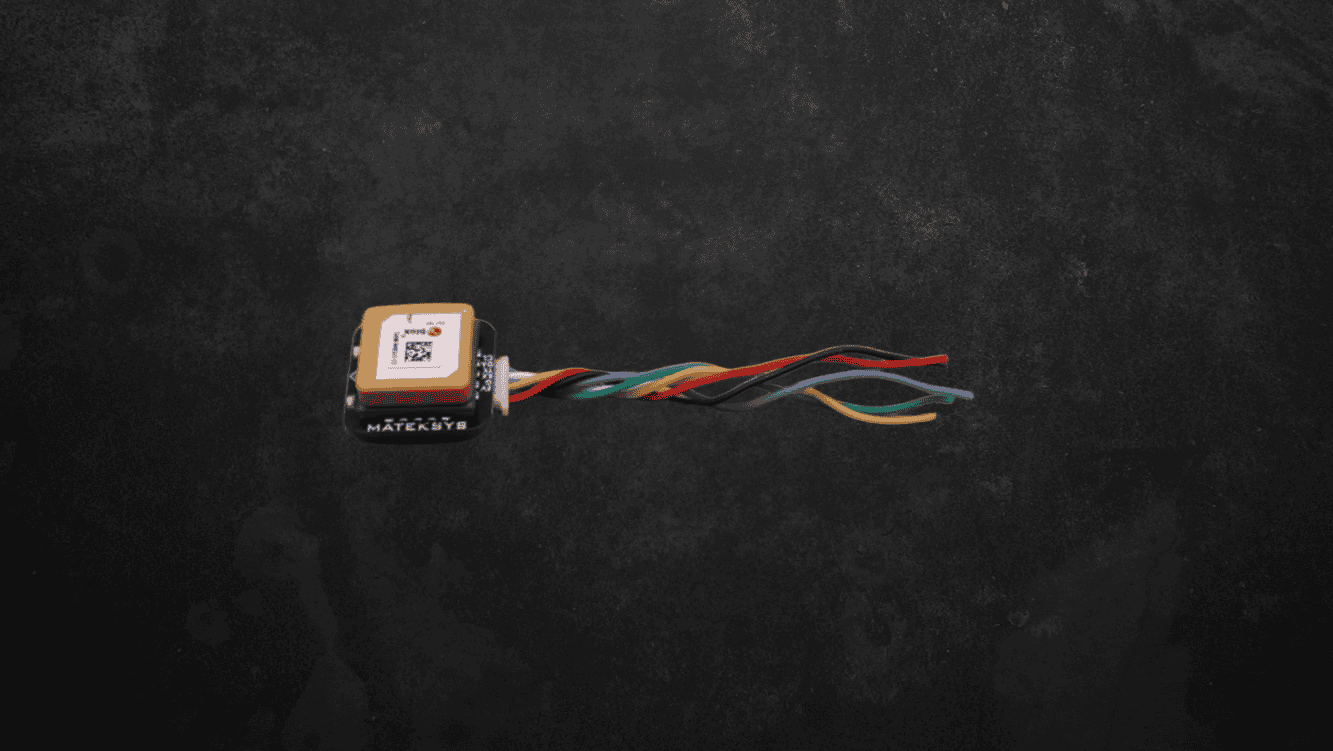
- Обожмите провода и установите 6-пиновый коннектор Dupont, соблюдая правильный порядок проводов.
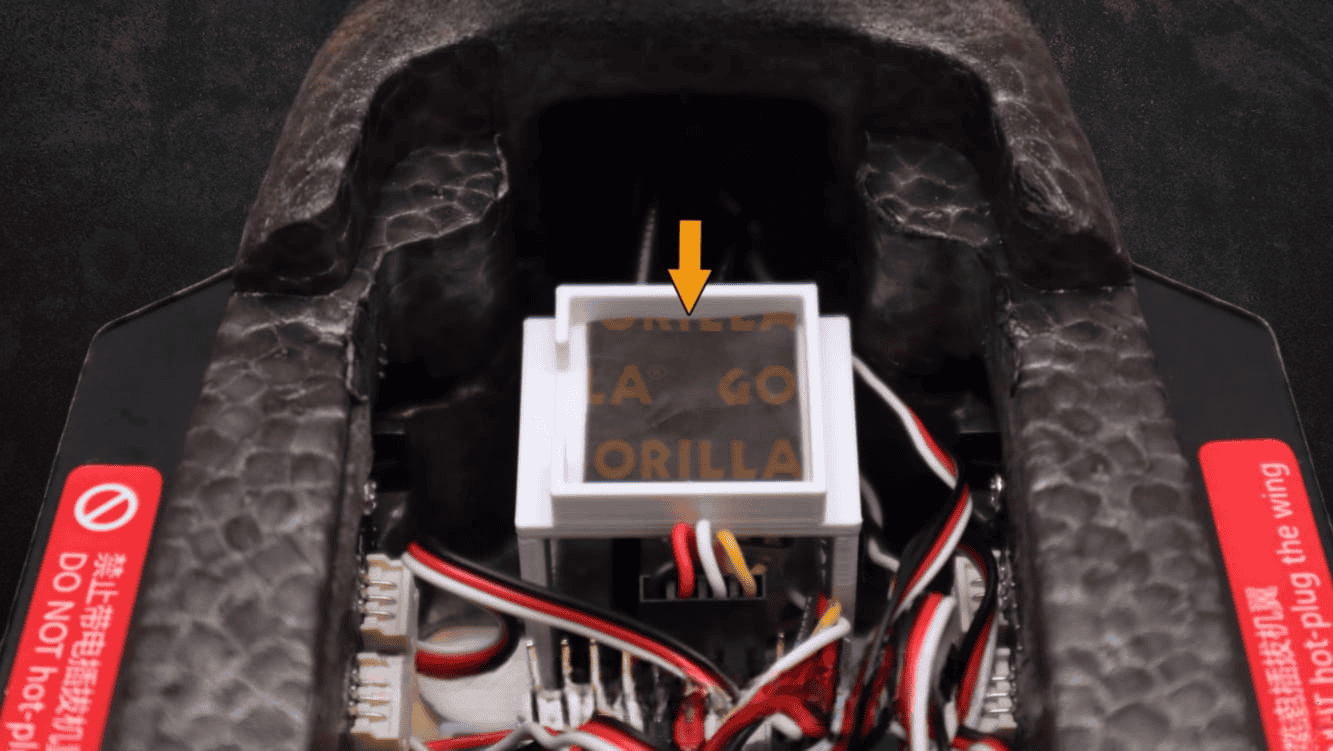
- Наклейте кусок монтажной ленты Gorilla (15x15 мм) внутрь 3D-печатного крепления GPS и установите в него GPS-модуль.
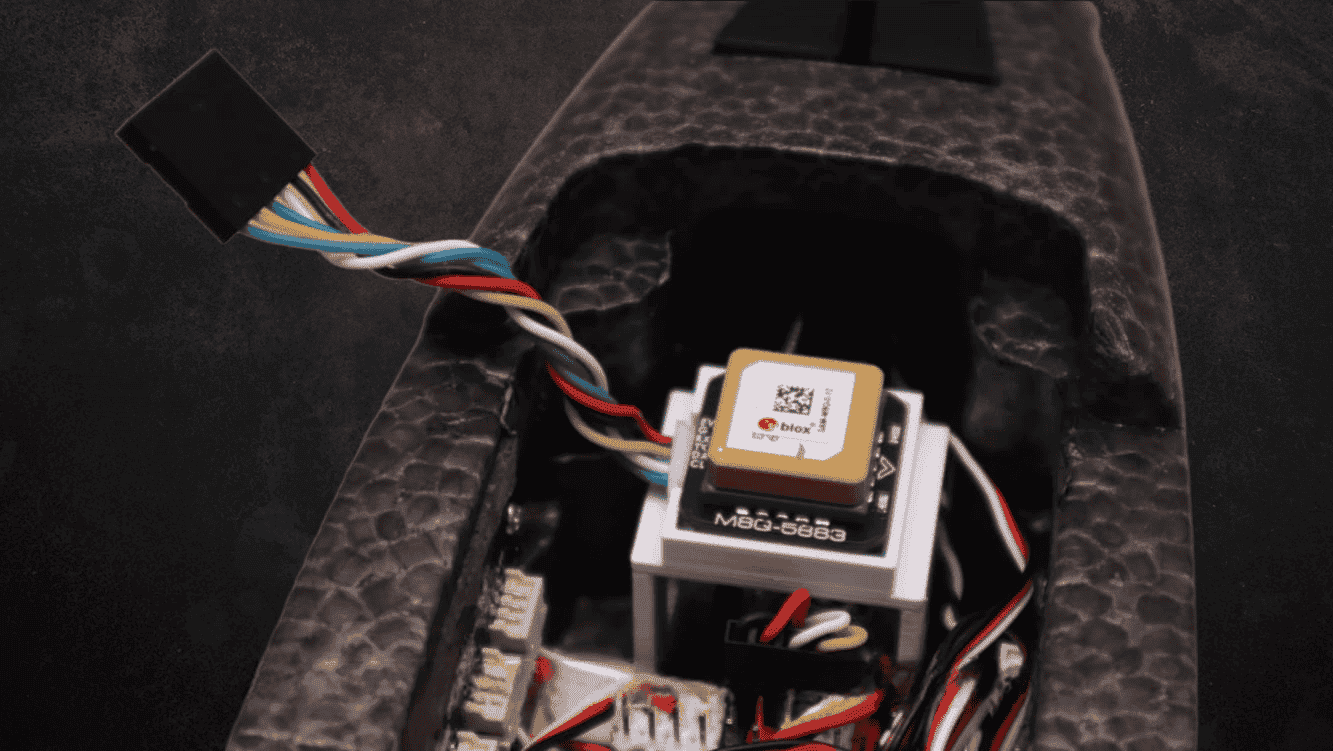
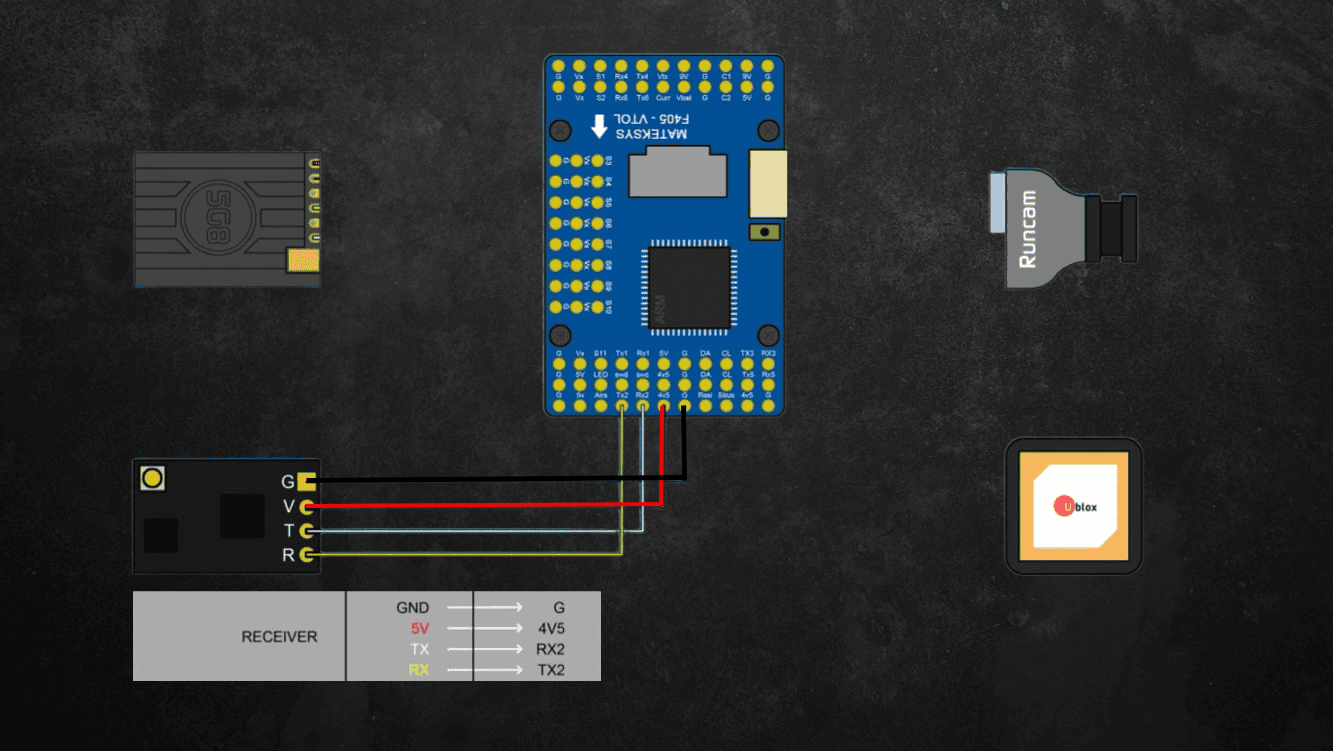
- Возьмите приемник (RX) TBS Crossfire Nano SE и припаяйте к нему 4 провода (GND, 5V, TX, RX).
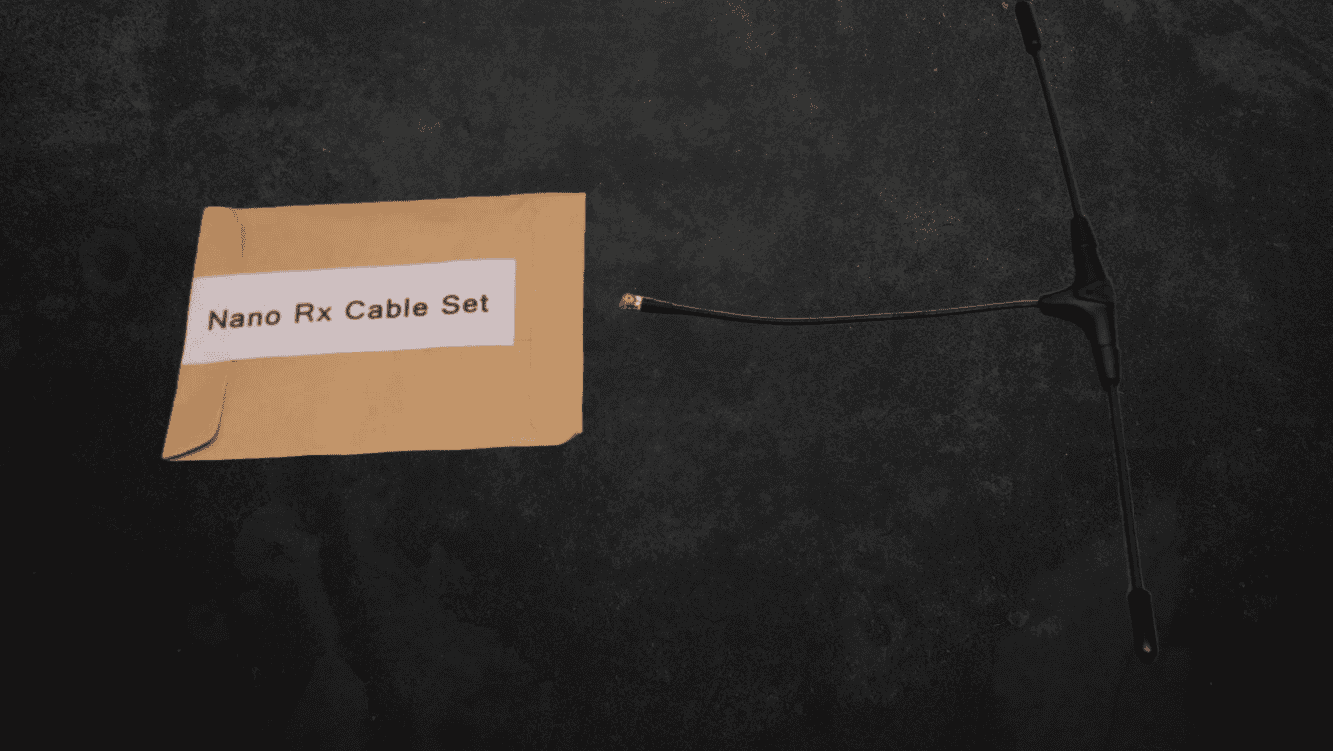
- Проденьте антенну приемника в отверстие, сделанное на шаге 59. Разъем U.FL должен оказаться рядом с GPS-модулем.

- Используйте 3D-печатный зажим, чтобы закрепить антенну внутри фюзеляжа.

- Подключите антенну к приемнику, а затем поместите приемник в термоусадку (идет в комплекте).


- Укоротите провода приемника до ~2 см, обожмите их и установите 4-пиновый коннектор Dupont.
- С помощью монтажной ленты Gorilla закрепите приемник под креплением GPS.

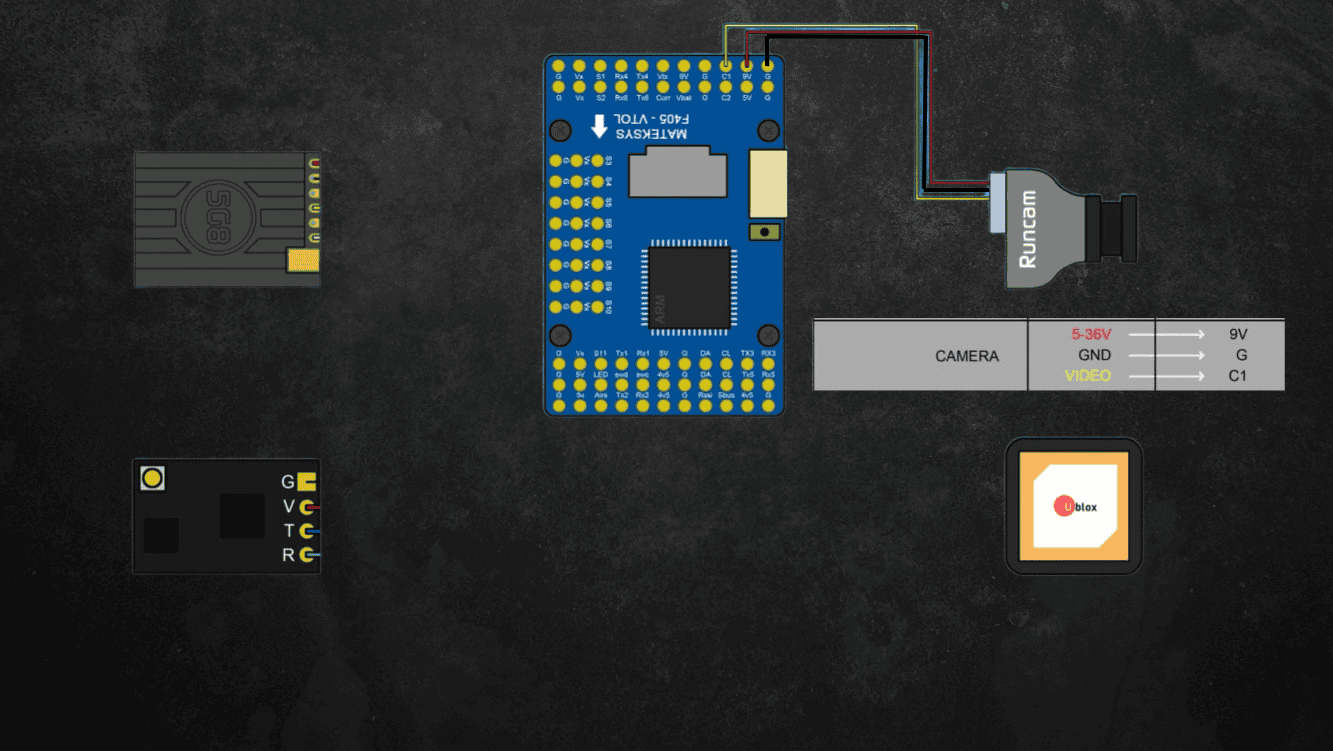
- Возьмите камеру Runcam Phoenix 2 Nano и снимите разъем с ее проводов.

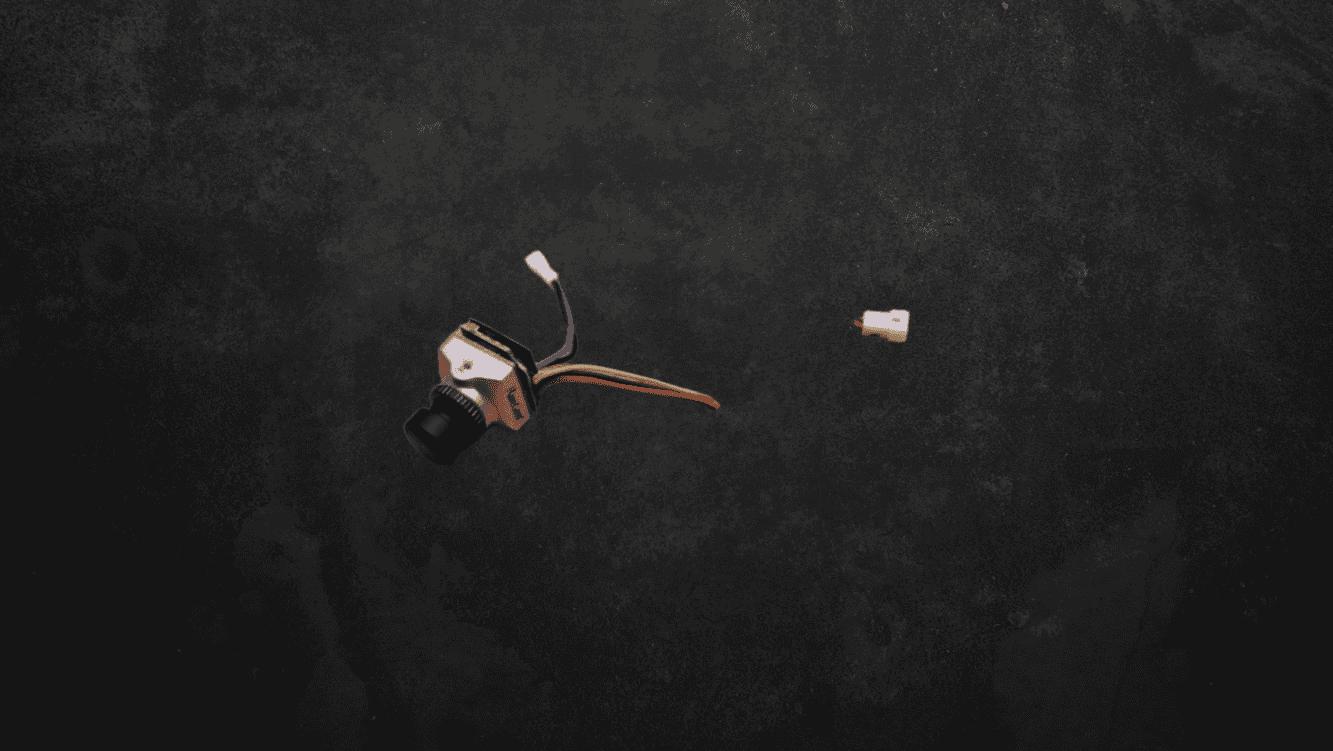
- Возьмите провод, извлеченный на шаге 7. Отрежьте разъемы с обоих концов и укоротите провод.

- Припаяйте один конец этого провода к проводам камеры (красный-красный, черный-черный, желтый-белый).

- На другом конце провода обожмите контакты и установите 3-пиновый коннектор Dupont.

- Установите камеру в носовую часть фюзеляжа.


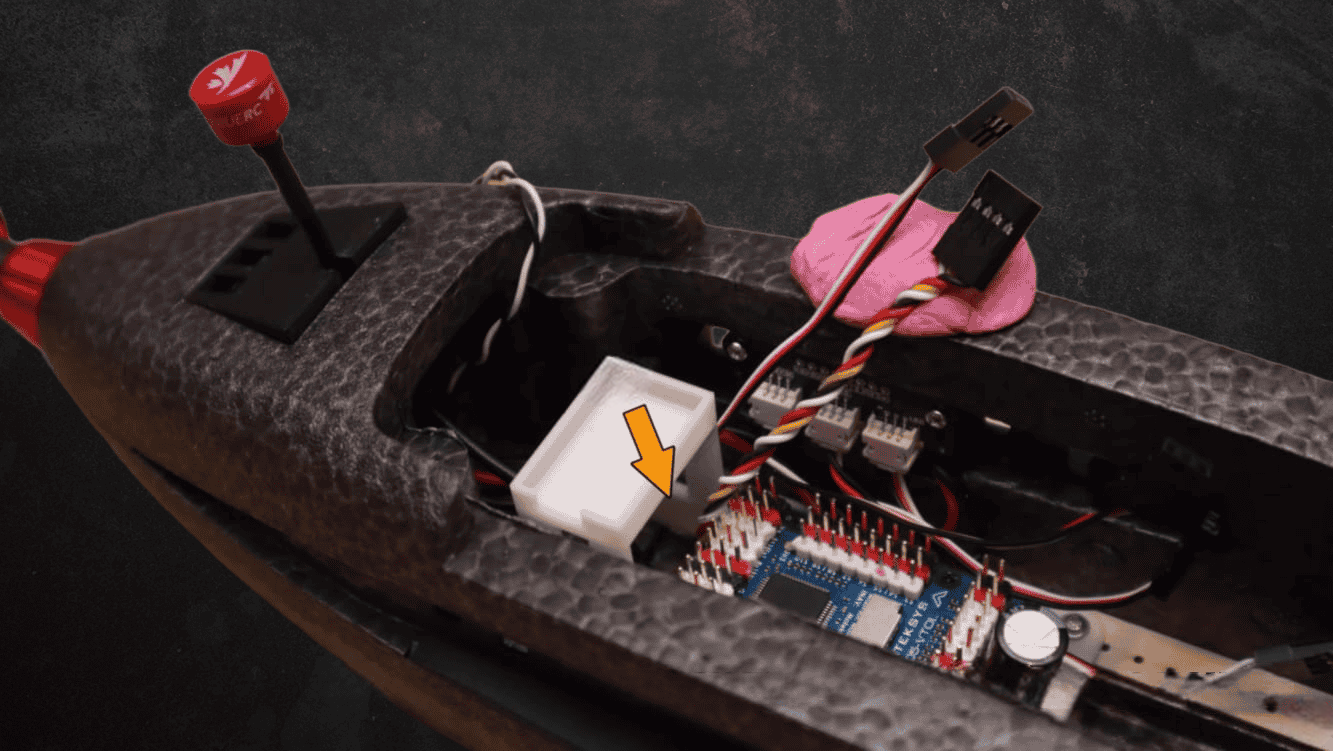
- Возьмите 3D-печатный лоток для аккумулятора и полосу липучки длиной 4 см.
- Установите лоток в фюзеляж, используя винты из пакета деталей механической связи.
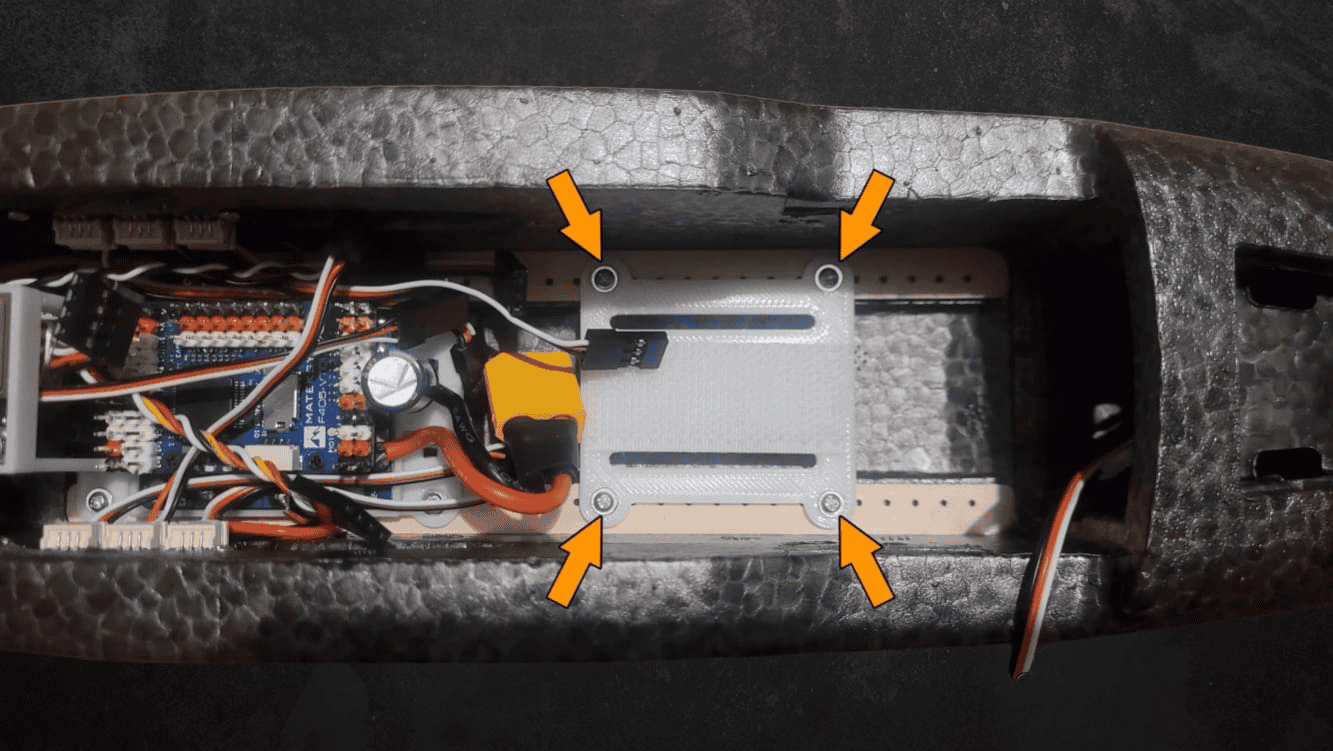
- Установите крышку (из PNP-комплекта).
![]()
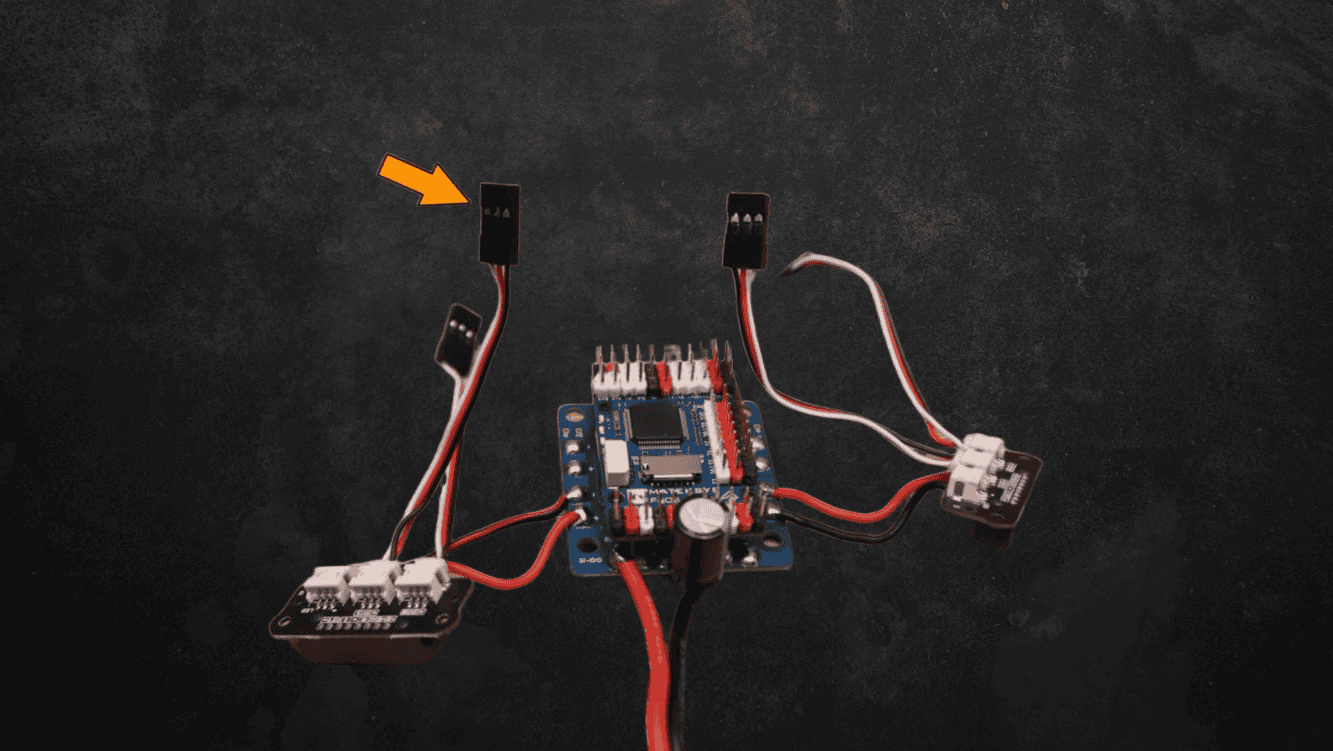
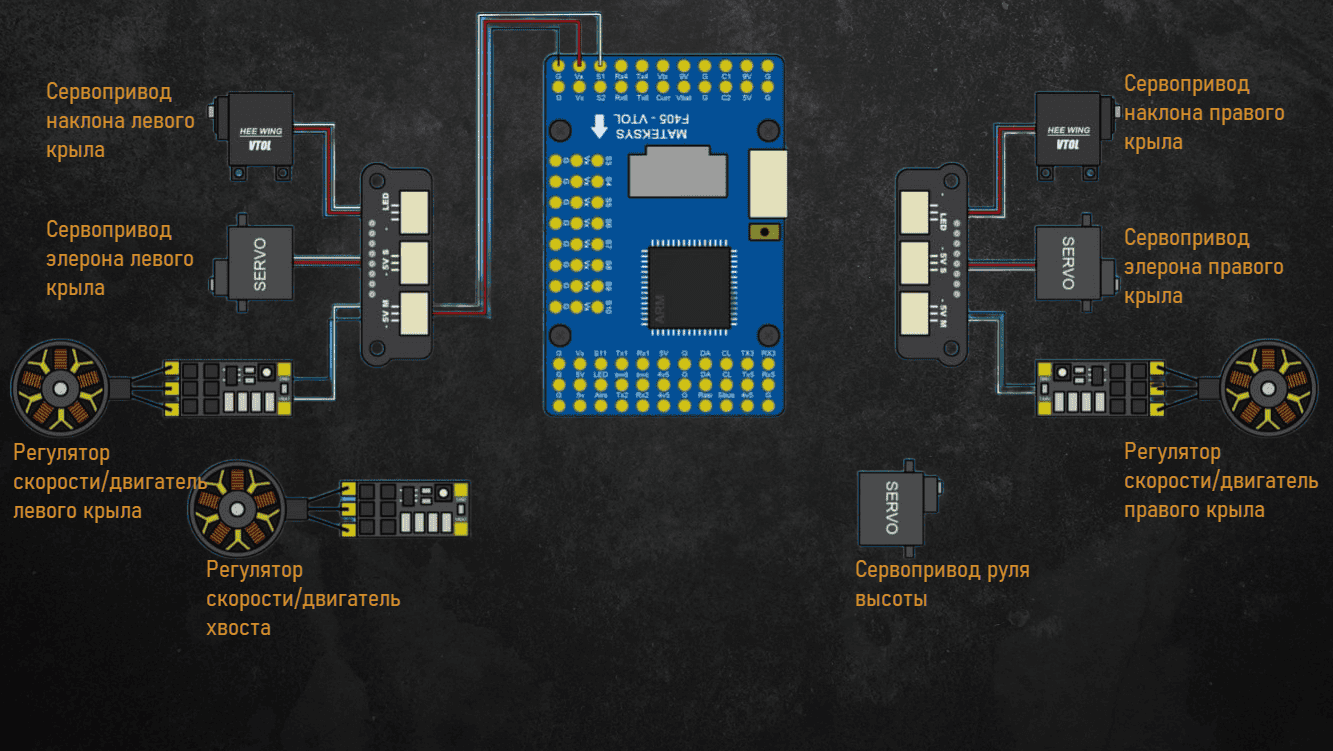
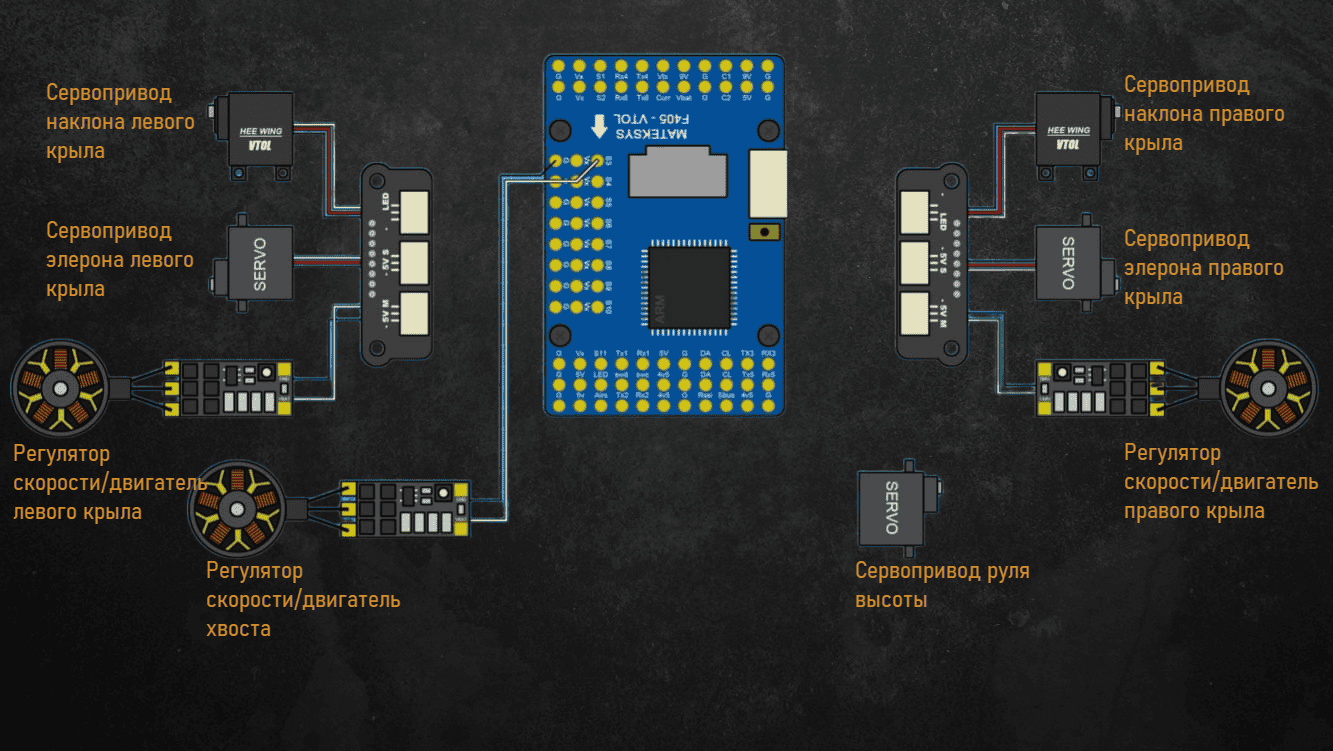
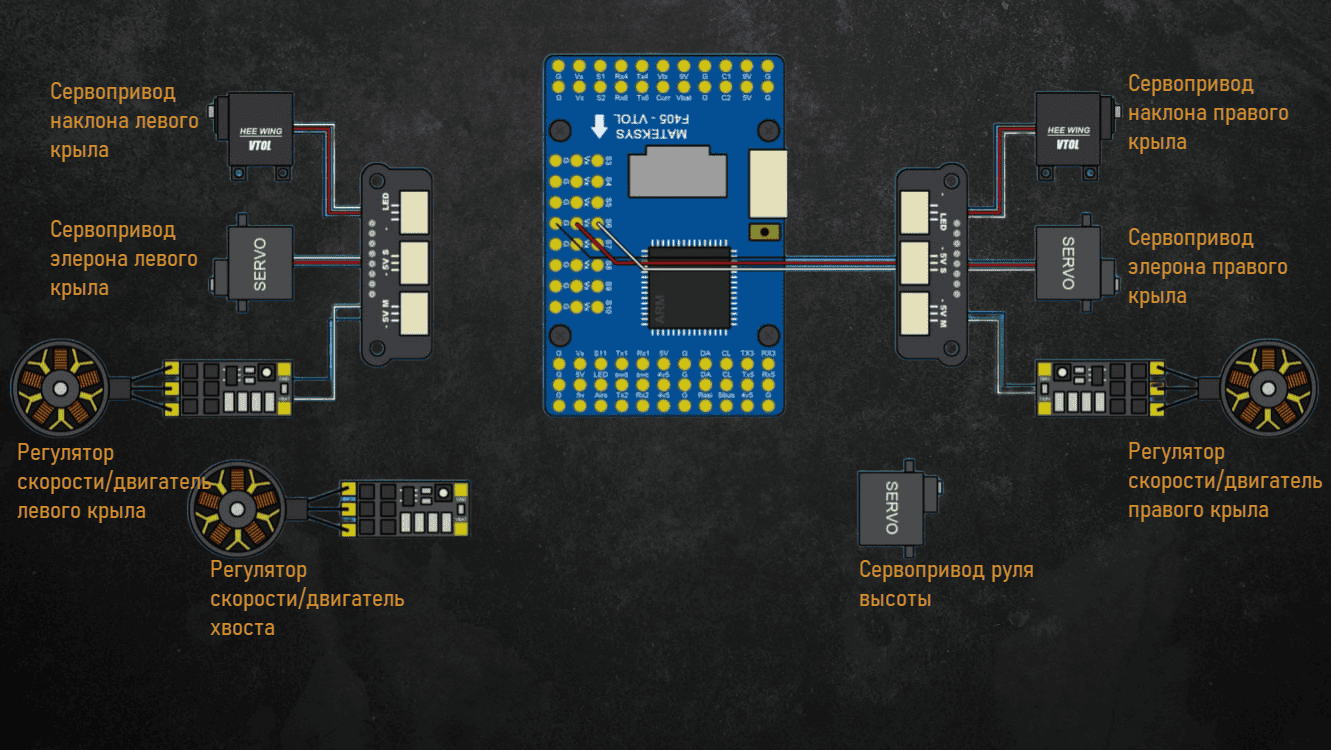
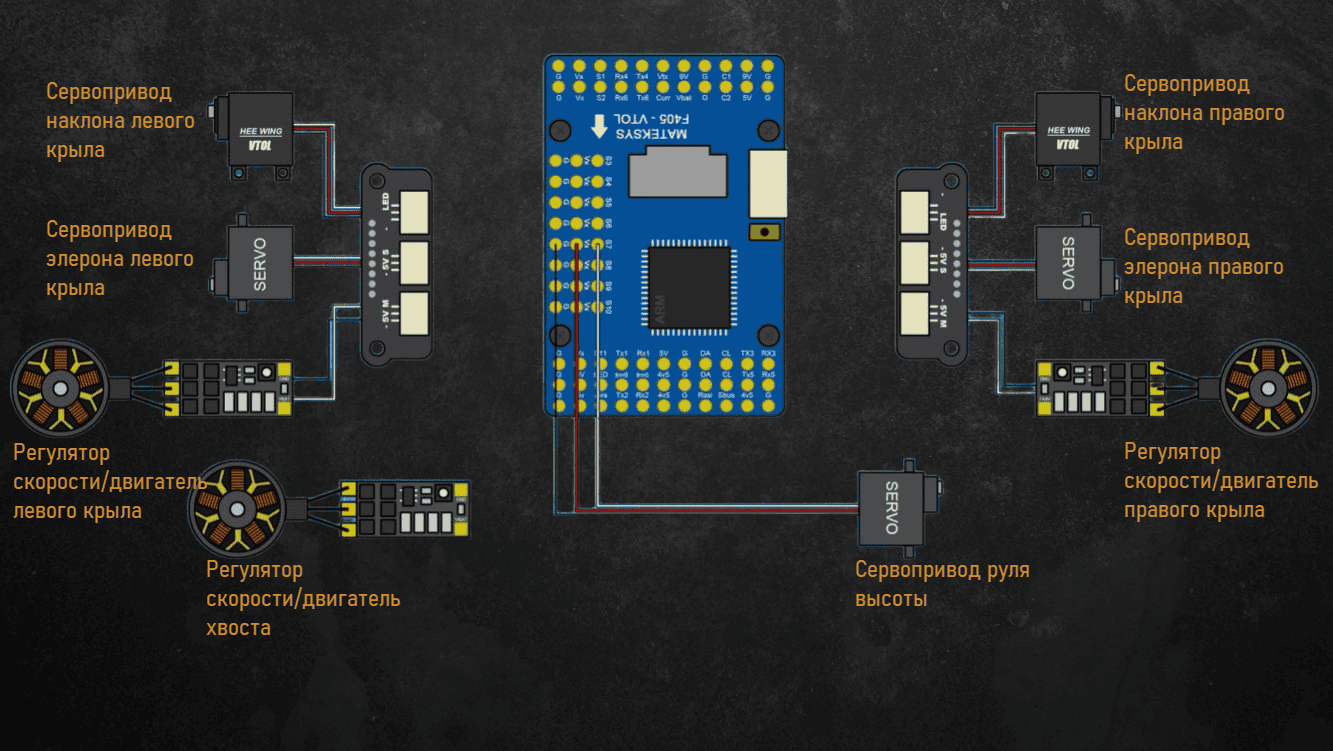
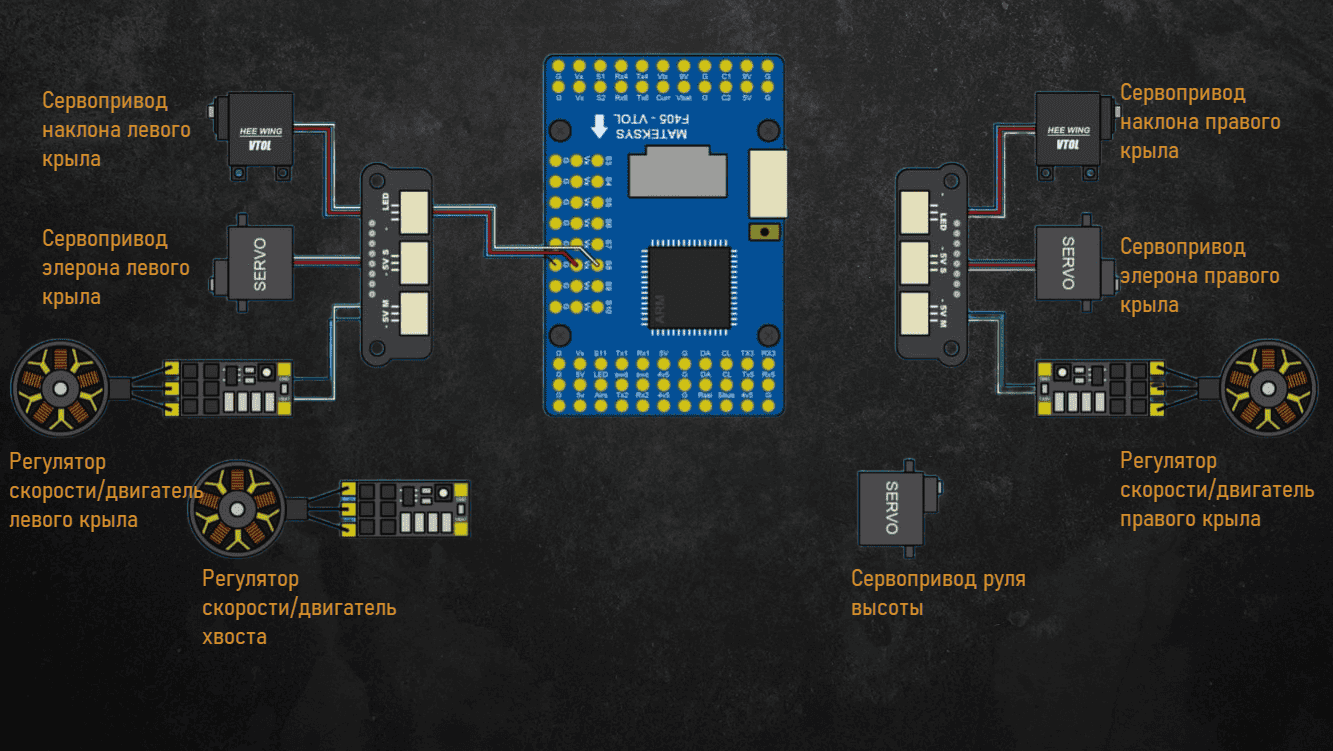
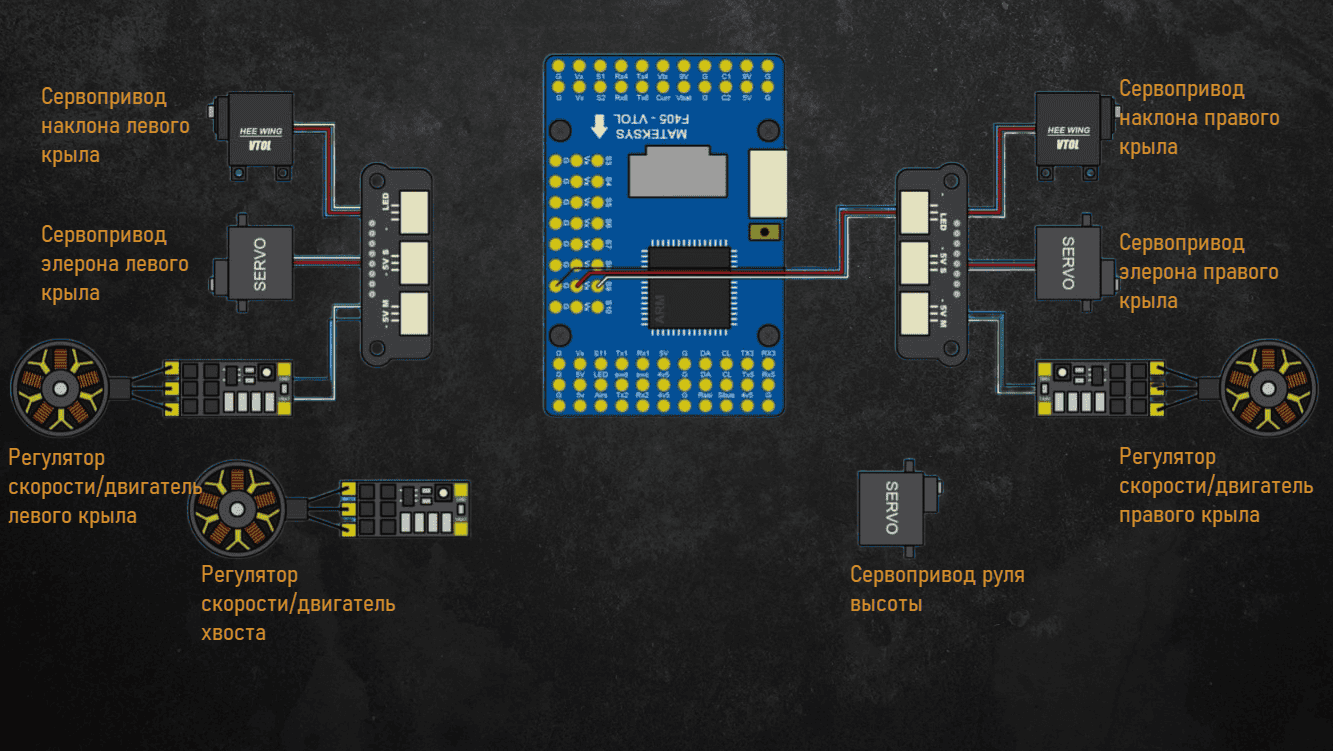
Этап 7: Подключение проводки к полётному контроллеру (FC)
Шаг 91: Подключите все компоненты к соответствующим разъёмам на FC.
| Компонент | Провода | Разъёмы на FC |
|---|---|---|
| Двигатель левого крыла | M , 5V , - (белый, красный, черный) |
S1, VX, G |
| Двигатель правого крыла | M , 5V , - (белый, красный, черный) |
S2, VX, G |
| Хвостовой двигатель | SIGNAL, _нет_ , GND(белый, черный) |
S3, VX, G |
| Элерон левого крыла | S , 5V , - (белый, красный, черный) |
S5, VX, G |
| Элерон правого крыла | S , 5V , - (белый, красный, черный) |
S6, VX, G |
| Руль высоты (Elevator) | SIGNAL, 5V , GND(белый, красный, черный) |
S7, VX, G |
| Сервопривод наклона левого крыла | LED , 5V , - (белый, красный, черный) |
S8, VX, G |
| Сервопривод наклона правого крыла | LED , 5V , - (белый, красный, черный) |
S9, VX, G |
Важно:
- Крылья физически маркированы «L» (левое) и «R» (правое).
- Не перепутайте ориентацию разъёмов!
- Не подключайте/отключайте крылья при включённом питании!
Этап 8: Механическая сборка
Шаг 92: Возьмите лонжерон (spar) из комплекта Heewing T1 PNP и вставьте его в отверстие в фюзеляже.
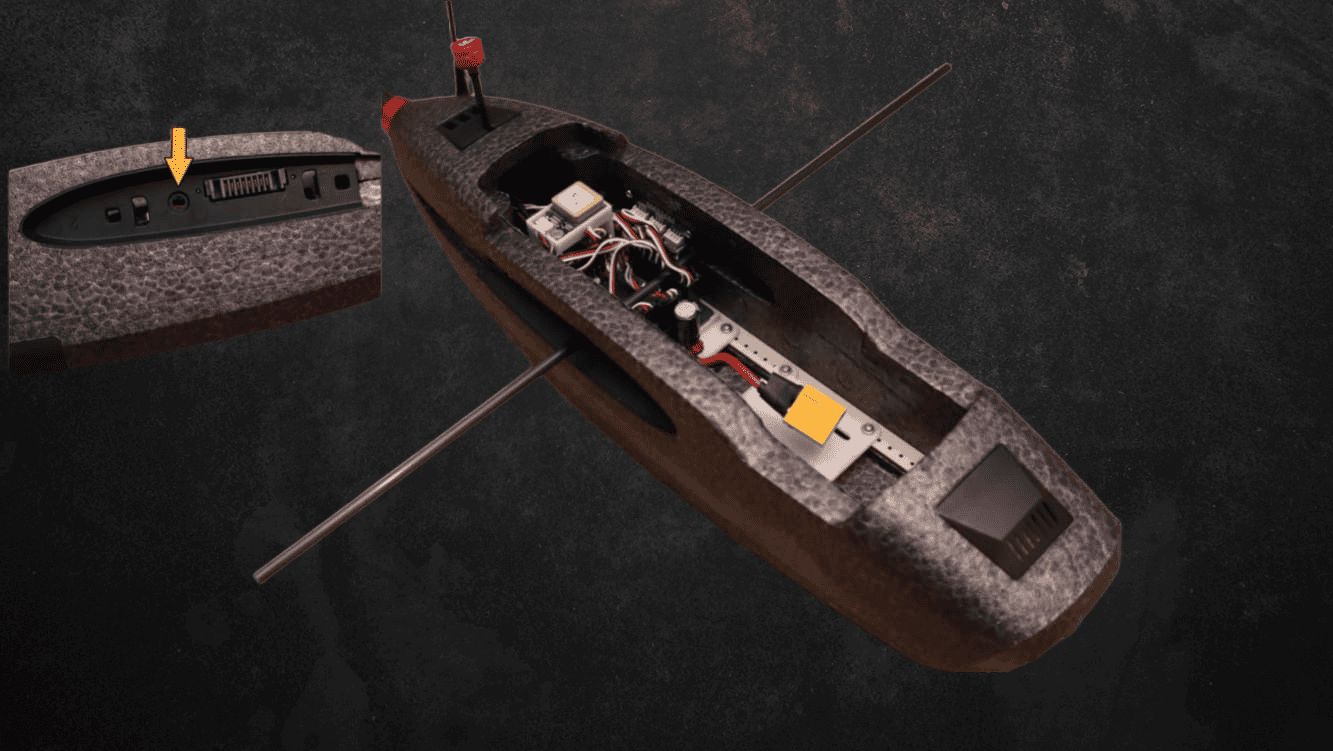
Шаг 93: Наденьте крылья на spar до щелчка. Затем зафиксируйте их на фюзеляже.


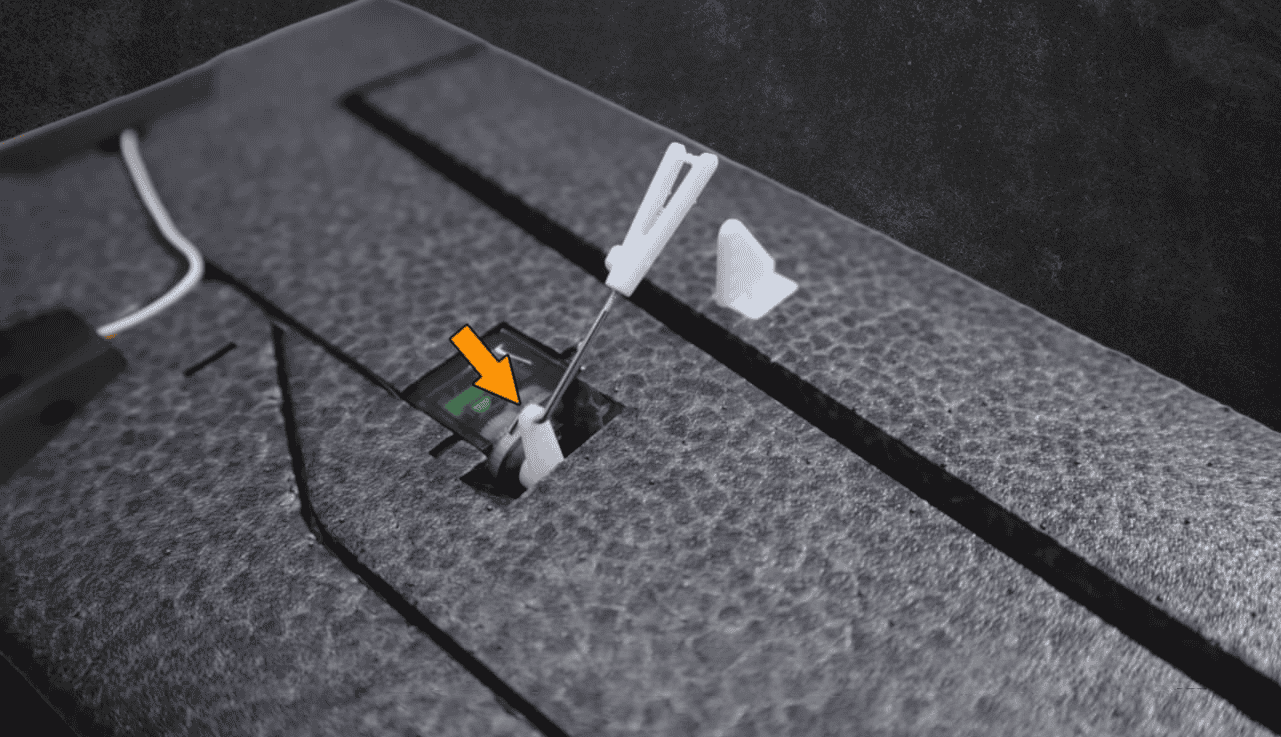
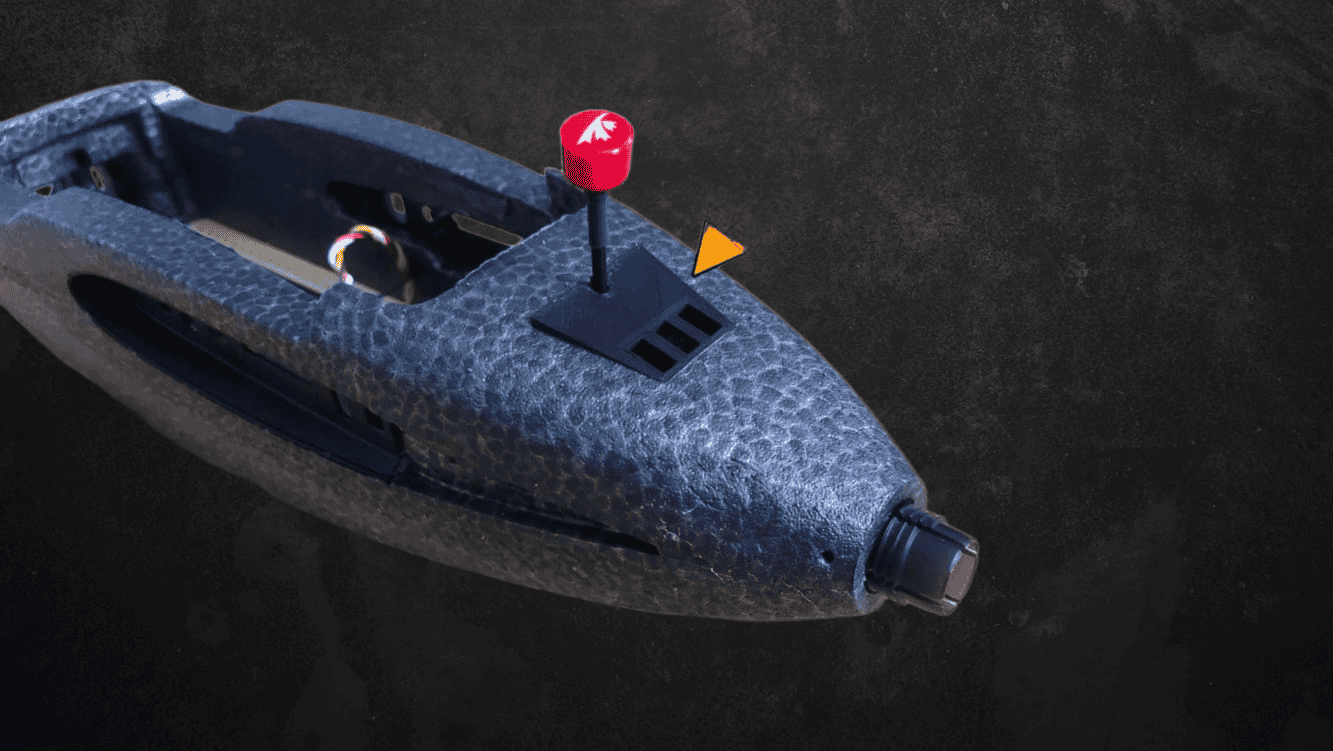
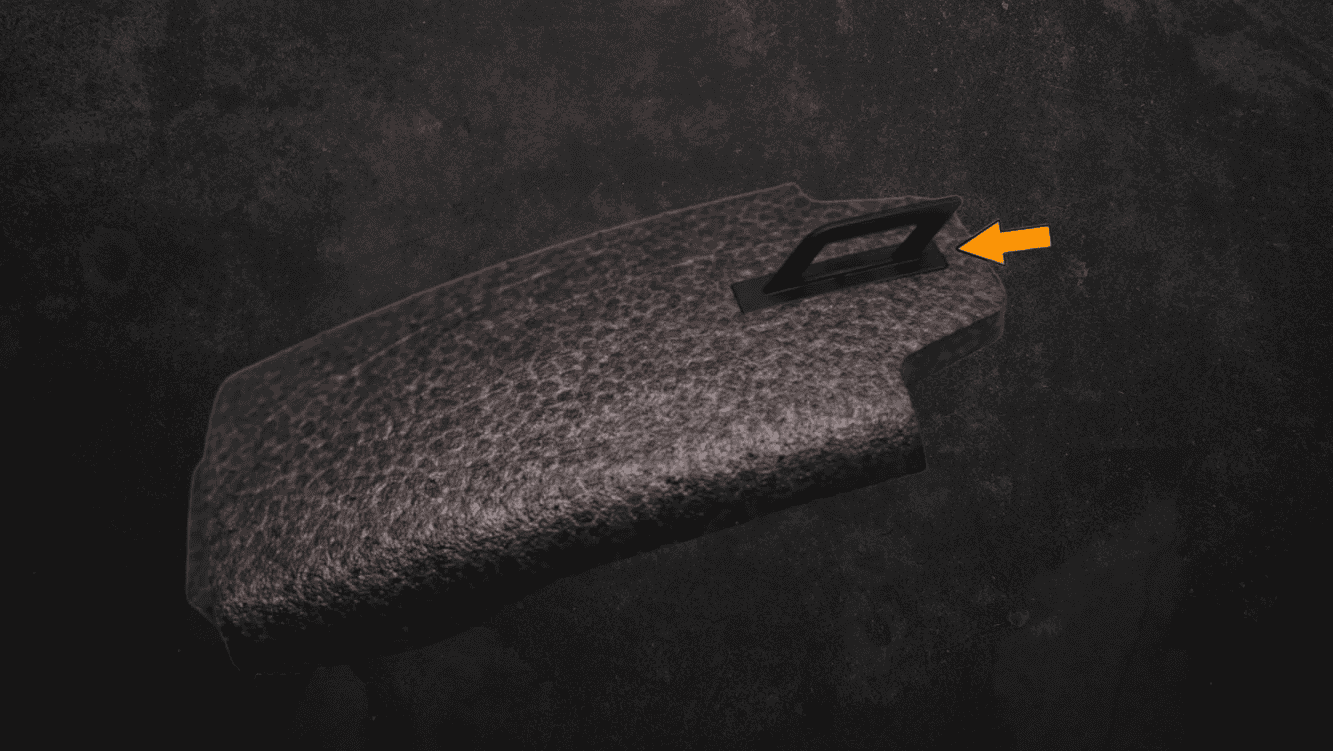
Шаг 94: Установите ручку и защёлку на передний люк (из комплекта T1 PNP). 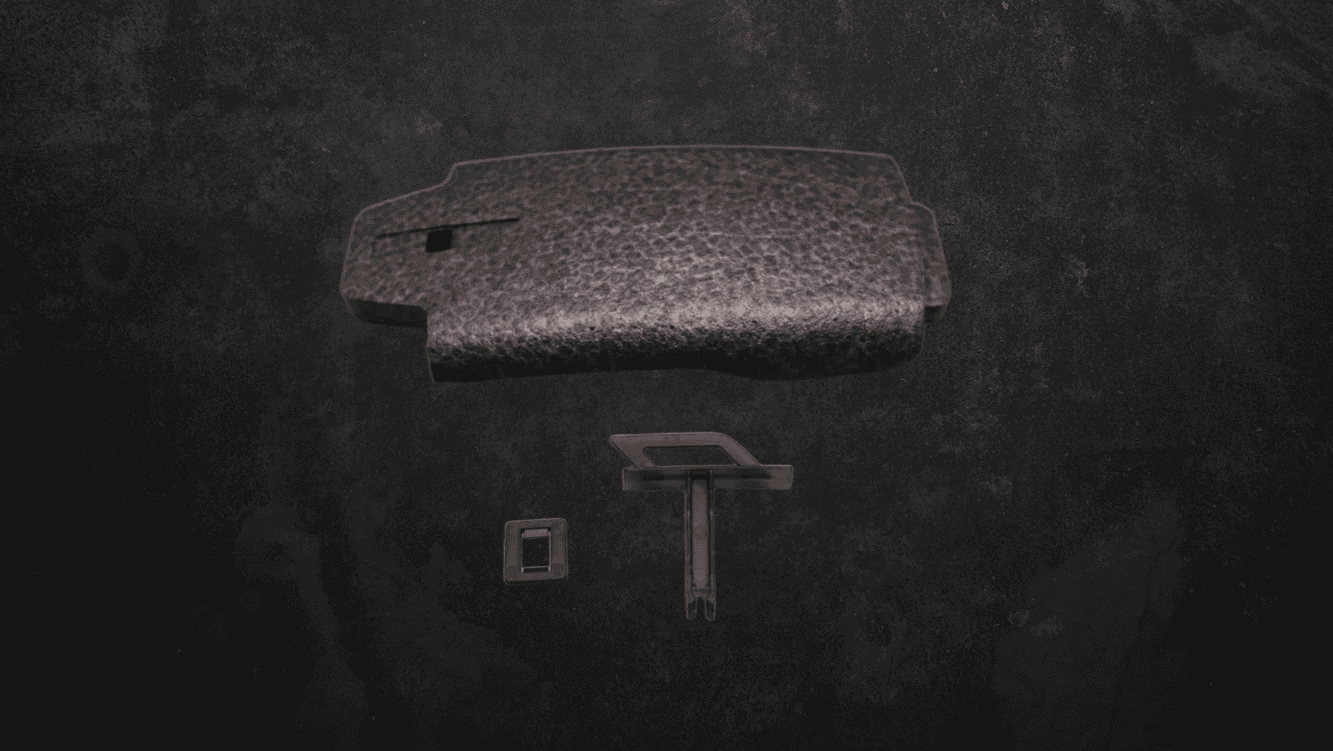

Шаг 95: Установите задний люк на фюзеляж (должен защёлкнуться).

Шаг 96: Установите передний люк на фюзеляж (должен защёлкнуться).
Этап 9: Установка винтов
Шаг 97: Из комплекта VTOL-конверсии возьмите винты. Убедитесь, что направление вращения правильное: CCW (против часовой стрелки) и CW (по часовой стрелке).

Шаг 98: Установите винты на двигатели с помощью винтов из того же пакета. 
Этап 10: Финальные штрихи
Шаг 99: Наклейте стикеры из комплекта T1 PNP.
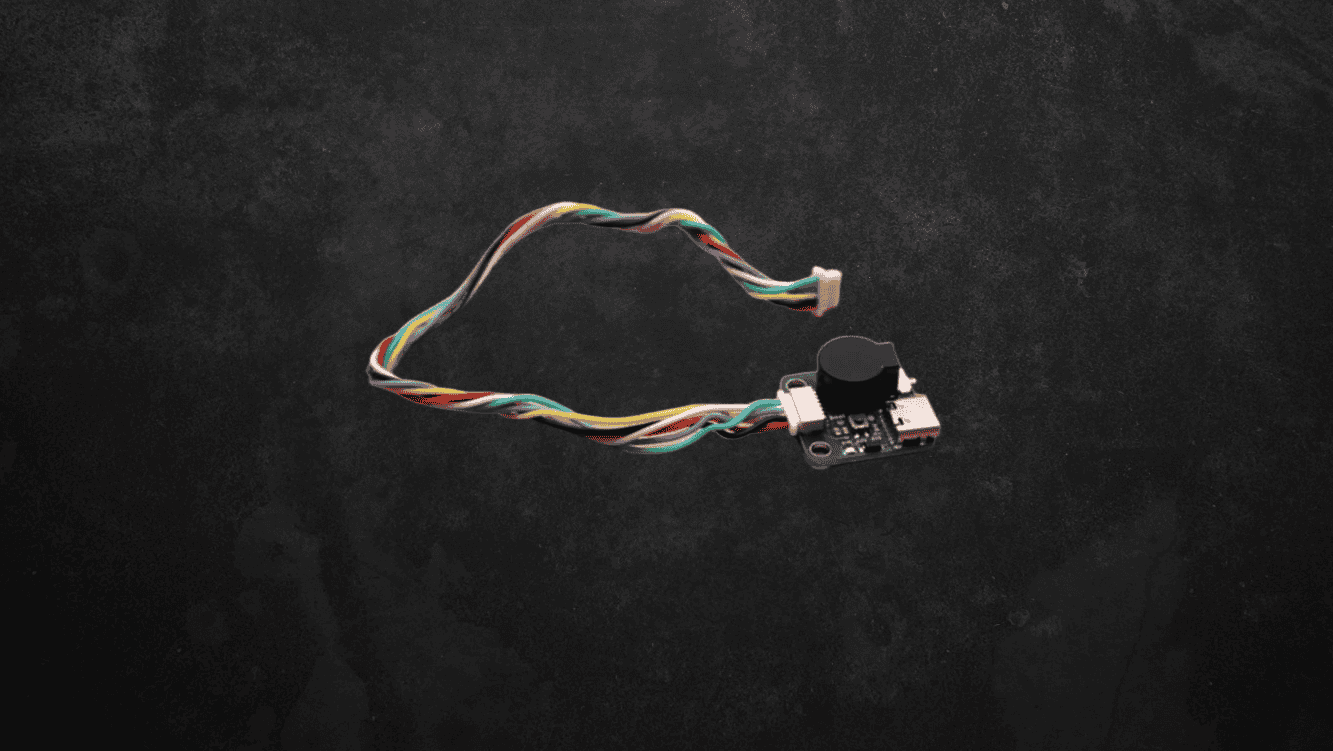
Подключите внешний блок управления (USB адаптер с пищалкой) к полетному контроллеру для возможности дальнейшего программирования.

Физическая сборка завершена!
Балансировка самолета производится после программирования и установки аккумуляторной батареи. Об этом позже.....
ID 23