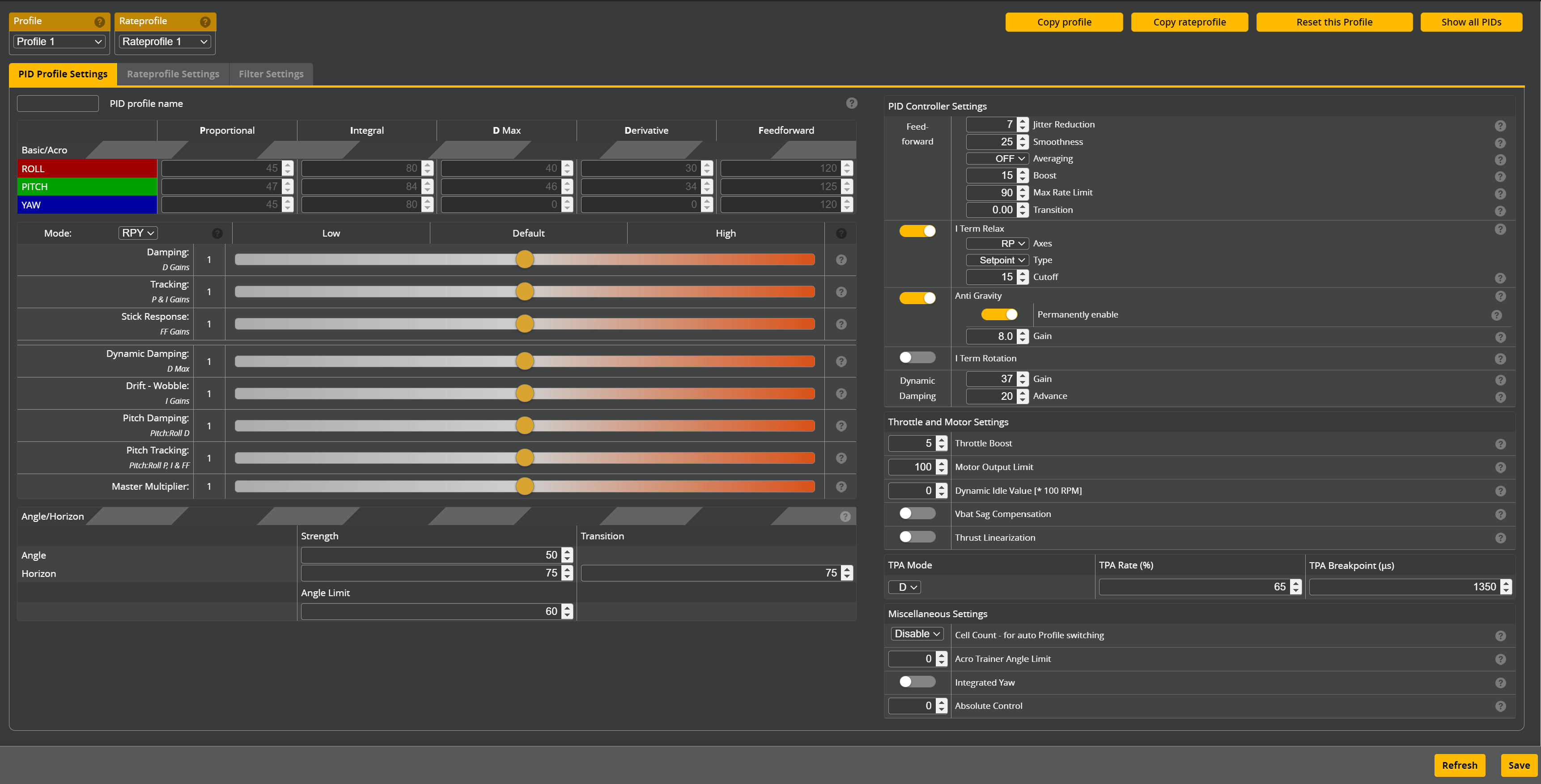
Настройки профиля PID. Вкладка [PID Tuning] в Betaflight
Технику БПЛА
Понедельник, 06 октября 2025
На вкладке PID Tuning производится настройка параметров PID-регулятора, фильтров и скоростных характеристик (Rates).
Betaflight поддерживает систему профилей, позволяющую сохранять несколько конфигураций для разных сценариев полёта. В левом верхнем углу вкладки PID Tuning можно выбрать профиль, который будет редактироваться.
- Профиль (Profile): 4 профиля для настройки параметров PID и фильтров.
- Скоростной профиль (Rate Profile): 4 профиля для настройки параметров скоростных характеристик (Rates).
В правом верхнем углу конфигуратора доступны следующие опции:
- Копировать профиль (Copy profile): Создать копию текущего профиля в другой профиль.
- Копировать скоростной профиль (Copy rateprofile): Создать копию текущего скоростного профиля в другой.
- Сбросить этот профиль (Reset this Profile): Сбросить текущий профиль до значений по умолчанию.
- Показать все PID (Show all PIDs): Отобразить значения PID для магнитометра.
- Настройки PID-профиля (PID Profile Settings)
- Настройки скоростного профиля (Rateprofile Settings)
- Настройки фильтров (Filter Settings)
Настройки PID-профиля
Здесь настраиваются параметры PID-регулятора для квадрокоптера.
Примечание:
Имя PID-профиля (PID profile name): Имя, описывающее условия, для которых профиль был настроен (например, «Гонки 6S», «Кино 4S» и т.п.).
Betaflight позволяет настраивать PID с помощью упрощённого интерфейса. Ползунки позволяют косвенно регулировать значения PID. Если параметр Режим (Mode) установлен в OFF, ползунки отключаются, и пользователь может вводить значения PID вручную.
Режим (Mode)
- OFF: Ползунки отключены, ввод значений PID осуществляется вручную.
- RP: Ползунки управляют только осями крена (Roll) и тангажа (Pitch), значения по рысканью (Yaw) задаются вручную.
- RPY: Ползунки управляют всеми осями (Roll, Pitch, Yaw).
Предупреждение!
При переключении из режима RP в режим RPY настройки рыскания (Yaw) будут перезаписаны значениями по умолчанию прошивки.
Ползунки (Sliders)
Ползунки позволяют настраивать лётные характеристики квадрокоптера, косвенно изменяя коэффициенты PID.
| Наименование (Name) | Описание (Description) |
|---|
Демпфирование (Damping)
(Коэффициенты D (D Gains)) |
D-коэффициент отвечает за сопротивление быстрым движениям и подавление колебаний, которые возникают из-за слишком высокого пропорционального (P) коэффициента.
-
Высокое значение D снижает чувствительность стиков управления, что делает реакцию мягче и менее резкой, но при этом моторы могут сильнее нагреваться. Такая настройка улучшает стабильность при сложных условиях, например, в воздушной "подушке" (prop wash) и при резких манёврах.
-
Низкое значение D обеспечивает более быструю и «острую» реакцию на движения стиков, но хуже справляется с воздушной подушкой и снижает устойчивость квадрокоптера к внешним воздействиям, таким как ветер.
|
Слежение (Tracking)
(Коэффициенты P & I (P & I Gains)) |
Коэффициенты P и I повышают общую отзывчивость квадрокоптера на команды управления и внешние воздействия.
-
Слишком высокие значения могут вызвать дребезг, колебания и быстрый «отскок» (bounceback) стиков, а также привести к перегреву моторов.
-
Увеличение параметра «Слежение» делает реакцию аппарата более острой и точной, предотвращая смещение носа от курса при управлении и внешних воздействиях, таких как воздушная подушка (prop-wash).
-
Низкие значения коэффициентов приводят к «болтанке» квадрокоптера и уходу с курса при движениях стиков и в условиях воздушной подушки.
Оптимальный выбор значений P и I обеспечивает стабильность и точность управления, минимизируя колебания и перегрев моторов.
|
Чувствительность стиков (Stick Response)
(Коэффициенты FF (FF Gains)) |
Коэффициенты FF увеличивают реакцию квадрокоптера на быстрые движения стиков управления.
-
Низкая чувствительность приводит к замедленной реакции и может вызывать медленную отдачу (sluggish response) в конце таких манёвров, как флип или бочка.
-
Высокая чувствительность обеспечивает резкую, быструю реакцию на резкие движения стиков, улучшая управляемость в динамичных ситуациях.
-
Слишком высокое значение может привести к перелёту (overshoot) — когда аппарат "перебивает" нужное положение в конце манёвра, снижая точность.
Примечание:
Функция «Ослабление I-члена» (I-term Relax) помогает уменьшить отдачу (bounceback) у аппаратов с низкой эффективностью или при низких значениях чувствительности стиков, улучшая плавность контроля.
|
Динамическое демпфирование (Dynamic Damping)
(D Макс (D Max)) |
Параметр D Max задаёт максимальное значение коэффициента D, до которого он может увеличиваться во время быстрых движений стиков.
-
Для гоночных дронов с низким базовым значением D (нацеленным на снижение нагрева моторов), увеличение этого ползунка улучшает контроль квадрокоптера при резкой смене направления и помогает бороться с «перелётами» в полёте.
-
Для кинематографических (кино) дронов, у которых полёт вперёд может быть менее стабильным, лучше повысить базовое значение «Демпфирования» (D Gain), а не ползунок «Динамического демпфирования».
При настройке динамического демпфирования обязательно следите за нагревом моторов и появлением посторонних шумов во время резких движений стиков.
Примечание:
Часто причина перелётов при выполнении флипов и бочек связана не с уровнем динамического демпфирования, а с недостаточным ослаблением I-члена (I-term Relax), десинхронизацией моторов (motor desyncs) или низкой эффективностью управления (authority). Если повышение значения «Динамического демпфирования» не помогает устранить проблему, рекомендуется вернуть ползунок в исходное положение и искать основную причину проблемы.
|
Уход — Колебания (Drift - Wobble)
(Коэффициенты I (I Gains)) |
Параметр I (интегральный коэффициент) отвечает за тонкую настройку удержания курса квадрокоптера.
-
Повышение значения I улучшает способность аппарата удерживать заданную траекторию в сложных манёврах, таких как спиральные виражи, орбиты и полёт с нулевой тягой.
-
Слишком высокое значение I, особенно при недостаточном P, может вызвать колебания, дрожание (wobble) или отдачу (bounceback) после флипов, бочек или резкого сброса газа до 0%.
Рекомендация:
Устанавливайте значение I так высоко, как возможно, чтобы квадрокоптер уверенно держал курс без появления колебаний при сбросе газа.
Примечание:
Если наблюдается отдача (bounceback), убедитесь, что включена функция «Ослабление I-члена» (I-term Relax). Также попробуйте уменьшить параметр eitrm_relax_cutoff — это поможет снизить отдачу и сделать управление более плавным.
|
| Наименование (Name) | Описание (Description) |
|---|
Демпфирование тангажа (Pitch Damping)
(Тангаж:Крен D (Pitch:Roll D)) |
Этот параметр увеличивает демпфирование по оси тангажа относительно оси крена, позволяя более точечно настраивать поведение аппарата именно по тангажу, не затрагивая крен.
-
Квадрокоптеры с большим моментом инерции по оси тангажа (например, с удлинёнными рамами) обычно требуют более высокого значения D по тангажу для стабильности и устранения колебаний.
-
Рекомендуется сначала настраивать основные ползунки «Демпфирование» (D Gain) и «Слежение» (P/I Gains) по оси крена, а затем использовать параметр Pitch:Roll D для точечной корректировки демпфирования именно по тангажу.
|
Слежение по тангажу (Pitch Tracking)
(Тангаж:Крен P, I & FF (Pitch:Roll P, I & FF)) |
Этот параметр усиливает стабилизацию по оси тангажа по сравнению с осью крена путем изменения коэффициентов P, I и FF.
-
Помогает эффективнее подавлять «болтанку» носа, которая может появляться при резких вводах стиков или при сбросе газа.
-
Рекомендуется сначала настроить общий параметр «Слежение» (P и I) по оси крена, поскольку это базовая стабилизация.
-
После этого используйте ползунок Pitch Tracking для более точной и прицельной настройки стабилизации именно по тангажу.
Также стоит обратить внимание на увеличение коэффициентов Anti-Gravity — они помогают удерживать стабильность при скачках газа и резких изменениях нагрузки.
|
| Общий множитель (Master Multiplier) |
Этот параметр масштабирует все PID-коэффициенты пропорционально, увеличивая или уменьшая их одновременно.
-
Рекомендуется изменять этот множитель только после того, как вы исчерпали возможности настройки отдельных ползунков P, I и D.
-
Обычно применяется для аппаратов с высоким моментом инерции (например, большие квадрокоптеры класса X-Class) или при низкой общей эффективности системы управления.
-
Слишком высокое значение общего множителя может привести к возникновению высокочастотных колебаний (trilling), а также к перегреву моторов, что может повредить аппарат.
|
Настройки прямой связи (Feed-Forward)
| Наименование (Name) | Описание (Description) |
|---|
| Подавление дребезга / Уменьшение дрожания (Jitter Reduction) |
Этот параметр уменьшает прямую связь между движением стиков и реакцией квадрокоптера при медленных и плавных движениях. Это позволяет добиться более плавного и мягкого полёта во время медленных манёвров, при этом сохраняя полную и моментальную реакцию на быстрые и резкие движения стиков.
-
При активном подавлении дребезга рекомендуется отключить параметр Переход (Transition), установив его в значение 0, чтобы не создавать конфликтов в управлении и обеспечить стабильность.
|
| Плавность /Сглаживание (Smoothness) |
Плавность (Smoothness)
Этот параметр сглаживает сигнал прямой связи между стиками управления и реакцией квадрокоптера, уменьшая шум и резкие колебания.
-
Рекомендуется выбрать минимальное значение плавности, при котором сигнал остаётся стабильным и без помех.
-
Избыточное увеличение плавности может привести к запаздыванию реакции и «мягкости» управления, что снижает точность и скорость отклика аппарата.
|
| Усреднение (Averaging) |
Этот параметр усредняет последние 2–3 значения сигнала прямой связи между стиками и управлением квадрокоптера, что позволяет сгладить сигнал и уменьшить шум.
-
Усреднение эффективно при наличии периодического дребезга или помех, особенно характерного для быстрых RC-каналов.
-
За счёт сглаживания сигнал становится стабильнее, однако при этом появляется небольшая задержка в отклике управления.
|
| Усиление /Буст (Boost) |
Этот параметр добавляет дополнительный импульс при ускорении или замедлении движения стика управления, что помогает компенсировать инерцию моторов.
-
Усиление уменьшает гироскопическую задержку (лаг) и снижает риск перелёта (overshoot) благодаря сильной обратной тяге в моменты замедления стика.
-
За счёт этого управление становится более отзывчивым и точным, особенно при резких изменениях направления или скорости.
|
| Ограничение макс. скорости (Max Rate Limit) |
Этот параметр ослабляет прямую связь между движением стиков и максимальной скоростью вращения квадрокоптера при приближении стиков к их максимальному отклонению.
-
Основная задача — минимизировать риск перелёта (overshoot) на начальных этапах таких манёвров, как флип или бочка, за счёт плавного уменьшения чувствительности при больших углах стиков.
-
При этом параметр не влияет на реакцию в конце манёвра, позволяя сохранять точность и отзывчивость.
-
Более низкие значения Max Rate Limit активируют ослабление чувствительности раньше, делая движение более плавным и предсказуемым при подходе к максимальным значениям стиков.
|
| Переход (Transition) |
Этот параметр линейно уменьшает прямую связь между стиками и реакцией квадрокоптера в области около центра стиков.
-
В версиях Betaflight до 4.2 использовался для создания более плавной реакции в центральной зоне стиков, смягчая управление мелкими движениями.
-
Начиная с версии 4.3 рекомендуется устанавливать этот параметр в 0 (отключать), так как его функцию теперь выполняет параметр Подавление дребезга (Jitter Reduction), который обеспечивает более продвинутую и гибкую фильтрацию.
-
При значении около 0.3 происходит обнуление прямой связи в «мёртвой зоне» вокруг центра стиков, с плавным восстановлением чувствительности при отклонениях стиков более чем на 30%.
|
Прочие настройки (Others)
| Наименование (Name) | Описание (Description) |
|---|
| Ослабление I-коэффициента (I Term Relax) |
Ослабление I-коэффициента (I Term Relax) — это функция в Betaflight, которая ограничивает накопление интегральной (I) составляющей PID-регулятора при быстрых движениях стиков, чтобы уменьшить отдачу (bounceback) после манёвров, таких как флипы и бочки.
Есть два основных режима работы I Term Relax:
-
Setpoint Mode — основан на изменениях целевого значения поворота (setpoint) стиков. Он лучше подходит для более отзывчивых и гоночных дронов, так как быстрее и точнее "блокирует" накопление I-члена во время быстрых манёвров, позволяя лучше отслеживать резкие повороты. Однако этот режим более склонен к небольшому отдаче после манёвров.
-
Gyro Mode — основан на реальных изменениях гироскопа (фактических движениях дрона). Часто применяется на "вялых" или менее отзывчивых аппаратах (например, для фристайла), поскольку он может немного задерживать блокировку I-члена, но лучше уменьшает отдачу после манёвров. Обычно не применяется для оси рыскания (yaw).
Также можно настраивать параметр iterm_relax_cutoff, который определяет порог скорости стиков, при котором начинается ослабление накопления I. Меньшие значения отключают накапливание I раньше.
В версиях Betaflight 4.2 и выше рекомендуется использовать режим Setpoint, так как он стал более стабильным и эффективным. Режим Gyro может иметь смысл для специфических случаев, особенно на менее отзывчивых аппаратах
|
| Антиграви (Anti Gravity) |
Этот параметр автоматически увеличивает интегральный коэффициент (I-член), а начиная с версии Betaflight 4.3 — также пропорциональный коэффициент (P), при резких изменениях газа (throttle).
-
Зачем нужен: помогает удерживать стабильность вращения и позиции квадрокоптера во время быстрого изменения тяги, когда силовые воздействия резко меняются (например, при «прокачках» газа, throttle pumps).
-
Кому полезен: особенно эффективен для аппаратов с низкой общей эффективностью управления или с нестабильным (смещённым) центром тяжести, где без анти-гравитации наблюдается раскачка и потеря курса при резких изменениях газа.
Если хотите, могу помочь с практическими рекомендациями по настройке параметров Anti Gravity или подсказать типичные значения для разных стилей полёта — дайте знать!
|
| Вращение I-коэффициента / I Term поворот (I Term Rotation) |
Этот параметр корректно перераспределяет интегральную составляющую (I-член) PID-регулятора между осями квадрокоптера при его вращении в пространстве. Это особенно важно для сложных трюков, таких как бочки с рысканьем (yaw rolls), воронки (funnels) и других акробатических манёвров, где аппарат одновременно вращается вокруг нескольких осей.
-
Зачем нужно: Без корректного вращения I-члена на разные оси интегральная составляющая может накопиться лишь на одной оси, что приводит к нежелательным отдачам, дрожанию или ухудшению контроля при комбинированных вращениях.
-
Кому полезен: Пилотам LOS acro (летящим в визуальной зоне, с акцентом на сложную акробатику) очень важно для качественного и плавного контроля при выполнении сложных трюков.
Включение или правильная настройка I Term Rotation помогает сохранить точное управление и стабилизацию в любых положениях и при множественных вращениях аппарата.
|
| Динамическое демпфирование — Коэффициент (Dynamic Damping - Gain) |
Этот параметр определяет скорость повышения значения D во время быстрых вращений или при наличии воздушной подушки (prop wash).
-
Усиление / Gain приводит к более быстрой адаптации коэффициента D к максимальному значению D Max при быстрых манёврах, что позволяет эффективнее подавлять колебания в таких условиях.
-
Значения около 40–50 обычно хорошо подходят для фристайловых сборок, обеспечивая баланс между плавностью и стабильностью.
-
Низкие значения Gain рекомендуются для гоночных настроек, так как они минимизируют «лаг» в D-сигнале, делая реакцию более быстрой, но с меньшим запасом по демпфированию.
Важное предупреждение:
Для правильной работы динамического демпфирования хотя бы один из двух параметров — Усиление / Gain или Опережение / Advance — должен иметь значение выше примерно 20. Если оба параметра выставлены в 0, то динамическое демпфирование не будет работать, и коэффициент D останется на базовом уровне, без увеличения при быстрых движениях.
|
| Динамическое демпфирование — Опережение (Dynamic Damping - Advance) |
Этот параметр добавляет чувствительность к движению стиков управления (а не к сигналу гироскопа), то есть реагирует на начало движения стикa раньше, чем параметр Gain.
-
Назначение: Advance помогает аппаратам с низкой эффективностью управления, у которых наблюдается запаздывание реакции в начале движения стиков, улучшая своевременность повышения коэффициента D.
-
Рекомендации: Обычно рекомендуется оставлять этот параметр на 0, так как в большинстве случаев он не приносит улучшений и может привести к излишней чувствительности.
Предупреждение:
Динамическое демпфирование будет работать корректно только в случае, если хотя бы один из параметров — Gain или Advance — установлен выше примерно 20. Если оба параметра равны 0, динамическое демпфирование отключено, и коэффициент D остаётся на базовом уровне.
|
параметры газа и моторов (Throttle and Motor Settings)
| Наименование (Name) | Описание (Description) |
|---|
| Увеличение газа (Throttle Boost) |
Этот параметр временно увеличивает тягу моторов при быстрых изменениях положения стика газа.
-
Назначение: Повышает мгновенную реакцию квадрокоптера на резкие движения стика газа, сокращая задержки между вводом команды и ответом двигателя.
-
Эффект: Обеспечивает более быструю и резкую отдачу при ускорении, улучшая управляемость и контроль, особенно при динамичных манёврах или гонках.
-
Особенности: Усиление газа работает только в момент резких изменений входного сигнала, временно увеличивая мощность моторов, после чего тяга возвращается к обычному уровню.
|
| Ограничение выхода на двигатель (Motor Output Limit) |
Этот параметр устанавливает максимальное значение выходного сигнала на моторы в процентах от полного диапазона.
-
Основная цель — снизить нагрузку на ESC и предотвратить перегрев моторов при использовании батарей с напряжением выше рекомендованного для данной сборки.
-
Например:
-
Если у вас сборка под 4S, но вы подключаете 6S батарею, рекомендуется ограничить мощность моторов примерно до 66%.
-
Аналогично для 4S батареи на 3S-сборке — около 75%.
-
При этом важно обязательно проверить, что все компоненты аппарата (ESC, регуляторы, моторы, провода и соединения) рассчитаны и поддерживают напряжение используемой батареи, чтобы избежать выхода из строя.
Рекомендация: Использование ограничения мощности помогает продлить ресурс комплектующих и избежать тепловых проблем, но при этом снижает максимальную производительность двигателя и общий запас тяги. Балансируйте этот параметр с требованиями к полёту и безопасностью.
|
| Динамическое значение холостого хода [* 100 RPM] (Dynamic Idle Value) |
Этот параметр задаёт минимальные обороты моторов (в условных единицах, умноженных на 100), при которых обеспечивается стабильная работа и улучшенное управление на низких оборотах.
-
Назначение: Улучшает управление квадрокоптером при низкой тяге, снижая риск десинхронизации моторов (motor desync).
-
Повышает эффективность работы PID-регуляторов, обеспечивая лучшую стабильность полёта на нулевой тяге и в особенностях, таких как зависание вверх ногами (inverted hover).
-
Рекомендуется устанавливать минимальные обороты моторов в диапазоне 3000–3500 об/мин (то есть Dynamic Idle Value = 30–35 в условных единицах, если считать *100 RPM).
|
| Компенсация просадки напряжения батареи (Vbat Sag Compensation) |
Этот параметр помогает поддерживать стабильную работу газа и PID-регуляторов при падении напряжения батареи во время полёта.
-
Что происходит без компенсации: При снижении напряжения под нагрузкой (просадке) мощность моторов уменьшается, что может привести к ухудшению отклика управления, потере стабильности и снижению общей эффективности полёта.
-
Задача компенсации: Увеличить выходной сигнал на моторы пропорционально падению напряжения, чтобы компенсировать просадку и обеспечить равномерное поведение аппарата.
-
Диапазон настройки: 0–100%, где 0% — компенсация отключена, 100% — полная компенсация.
-
Рекомендуемое значение: 100%, чтобы максимально нивелировать эффект просадки напряжения и поддерживать корректное управление.
|
| Линейная тяга (Thrust Linearization) |
Этот параметр корректирует отклик двигателя на малых значениях газа, делая его более линейным и отзывчивым.
-
Зачем нужна: При низкой подаче газа многие моторы и ESC (особенно с частотой ШИМ 48 кГц) имеют нелинейный отклик — небольшой ввод газа может не давать нужного ускорения, а реакция становится резкой при переходе к средним значениям. Линеаризация тяги устраняет эту проблему, улучшая управляемость и точность на малых оборотах.
-
Особенно полезна для: микроквадрокоптеров типа whoops и других аппаратур с очень чувствительной управляющей аппаратурой и высокочастотными ESC.
-
Диапазон и типичные значения: от 0% (выключено) до 150%, обычно достаточно установить в пределах 30–40%, чтобы добиться заметного улучшения плавности и контроля без потерь в высокой тяге.
-
Не влияет на: высокий газ и максимальную мощность моторов — там отклик остаётся как есть.
|
Разные настройки (Miscellaneous Settings)
| Наименование (Name) | Описание (Description) |
|---|
| Количество "банок" — для автоматического переключения профилей (Cell Count - for auto profile switching) |
Параметр Количество банок / элементов — для автоматического переключения профилей (Cell Count - for auto profile switching) в настройках квадрокоптера и Betaflight используется для автоматического выбора профиля настройки в зависимости от количества элементов в установленной батарее.
-
Вы указываете количество элементов (например, 4S, 6S и т.п.) в этой настройке контроллера.
-
Контроллер автоматически подгружает заранее сохранённый профиль с оптимальными PID-коэффициентами, параметрами моторов и фильтрами, который подходит именно для данного напряжения и характеристик питания, связанных с количеством элементов аккумулятора.
-
Это удобно, если вы используете одну и ту же сборку с разными батареями и хотите, чтобы настройки управления автоматически подстраивались под особенности каждой батареи без необходимости вручную менять профили.
-
Обычно в настройках Betaflight вы заранее создаёте несколько профилей, каждый из которых оптимизирован под конкретный тип батареи/количество элементов, а этот параметр связывает батарею с нужным профилем.
|
| Ограничение угла в режиме обучения (Acro Trainer Angle Limit) |
Ограничение угла в режиме обучения (Acro Trainer Angle Limit) — это функция в Betaflight, которая помогает новичкам безопасно осваивать режим Acro (ручной режим полёта с контролем скорости вращения без автоуровня), ограничивая максимальный угол наклона аппарата.
-
В режиме Acro Trainer квадрокоптер работает как в обычном Acro, но с ограничением по максимальному углу наклона по осям тангажа и крена. Это не позволяет аппарату переворачиваться или сильно наклоняться, что снижает риск аварий у начинающих пилотов.
-
Диапазон ограничения угла задаётся в пределах 10–80 градусов. Обычно для новичков выбирают меньшее значение (например, 20–40 градусов) и постепенно увеличивают угол по мере роста навыков пилотирования.
-
Режим активируется переключателем в настройках вкладки "Modes" вашего полётного контроллера (Betaflight Configurator). Для корректной работы должен быть включён акселерометр.
-
При включении Acro Trainer полёт происходит в Acro-стиле, но с подстройкой входных команд, чтобы не превышать заданный угол наклона. Это сохраняет учебный эффект и помогает привыкнуть к управлению без автоматического уровня.
-
Есть дополнительные параметры в CLI, которые регулируют силу ограничения угла (acro_trainer_gain), время предсказания (lookahead) и ось отладки. Но базово достаточно включить режим и задать угол.
|
| Интегрированное рыскание (Integrated Yaw) |
Этот параметр объединяет три составляющих PID-регулятора — P, I и D — по оси рыскания (yaw) в одну интегрированную схему управления. Благодаря этому настройка оси рыскания становится похожей на настройку осей тангажа (pitch) и крена (roll), что облегчает балансировку контроля и улучшает управляемость.
Ключевые особенности и рекомендации:
-
Работа с интегрированным P и I: При интегрированном рыскании коэффициент P фактически играет роль интегрального члена (I). Поэтому для предотвращения избыточного накопления интегральной ошибки рекомендуется использовать минимально возможное значение I на оси рыскания.
-
Интегрированный D как P: Аналогично, интегрированный D работает на оси рыскания как пропорциональный коэффициент (P), влияя на скорость реакции и стабилизацию. Это меняет классическую логику настройки PID для yaw, требуя более аккуратного подхода к подбору.
-
Причина использования:
Без интегрированного рыскания ось yaw традиционно настраивается иначе, поскольку угловые скорости и динамика на этой оси отличаются от roll/pitch. Интеграция упрощает настройку и приводит к более гармоничному поведению, особенно при акробатическом пилотировании и комбинированных трюках.
-
Настройка:
-
Значения I на yaw рекомендуется держать на минимуме, чтобы не было лишнего накопления интегральной составляющей, которое может приводить к дрожаниям и отдаче.
-
Значения P и D на yaw подбираются с учётом их новой роли — P становится в большей степени интегратором, а D — пропорционалом.
-
Совместимость: Обычно интегрированное рыскание включается через CLI или в конфигураторе Betaflight, если ваша версия прошивки и аппаратная начинка поддерживает эту функцию.
|
| Абсолютное управление / контроль (Absolute Control) |
Этот новый режим управления PID-регулятором работает на основе накопления абсолютной ошибки гироскопа в системе координат квадрокоптера, а не относительной ошибки (как при классических схемах).
-
Требования:
-
Обязательно включён Интегрированный Yaw (Integrated Yaw), так как Absolute Control рассчитан на работу без классического I-члена и использует изменённую схему интегрирования ошибок.
-
Должен быть включён AirMode — режим, при котором управление остаётся активным даже на нулевых значениях газа, что важно для стабильного удержания положения.
-
Рекомендуется включать Ослабление I-члена (I Term Relax) для осей Roll и Pitch (RP), а при использовании совместно с интегрированным рысканием — также для оси Yaw (R, P и Y).
-
Как работает:
Вместо традиционного накопления ошибки относительного setpoint, Absolute Control накапливает абсолютную ошибку, измеренную гироскопом, в координатах самого аппарата. Это решает некоторые сложные проблемы, связанные с корректным распределением интегральной части при вращениях, которые возникают при использовании классической схемы Вращения I-члена (I Term Rotation).
-
Преимущества:
-
Улучшенное поведение в сложных акробатических манёврах (особенно с комбинированным вращением по нескольким осям).
-
Возможное уменьшение «отдачи» и дрожжаний, возникающих из-за некорректного накопления интегральной ошибки при вращениях.
-
Может выступать как альтернатива или дополнение к параметру I Term Rotation в будущем — решение проблем, связанных с перераспределением интегральной составляющей.
-
Совместимость и активация:
-
Основной режим PID должен поддерживать Absolute Control, обычно настраивается через CLI (Command Line Interface) или конфигуратор Betaflight, если прошивка это поддерживает.
-
Включение через CLI: команда примерно set pid_process = absolute_control или подобная (зависит от версии Betaflight).
-
Необходимо корректно настроить остальные параметры, связанные с PID, особенно отключить классический I для yaw при использовании интегрированного рыскания.
-
Тонкости и рекомендации:
-
Режим рассчитан на опытных пользователей и требует тщательной настройки для получения оптимальных результатов.
-
Необходим классический AirMode для правильной работы удержания положения.
-
В сочетании с интегрированным рысканием и ослаблением I-члена достигается более стабильное и предсказуемое поведение, особенно в сложных трюках и при высоких скоростях вращения.
-
Может потребоваться дополнительная калибровка PID и фильтров для адаптации под Absolute Control.
|
TPA Mode в Betaflight (Throttle PID Attenuation) — это механизм динамического снижения значений PID-регуляторов при увеличении газа (дросселя) для предотвращения высокочастотных колебаний и излишней чувствительности управления на высоких оборотах моторов.
Что такое TPA и зачем он нужен?
-
TPA снижает усиление PID (чаще всего P и D составляющих) по мере роста газа, особенно начиная с определённого порога — так называемой точки срабатывания (TPA Breakpoint). Это помогает уменьшить колебания и "дребезжание", возникающие на высоких оборотах моторов, когда аппарат становится более нервным из-за резкой реакции элементов управления.
-
При низком газе PID работают в полную силу для точного контроля и чувствительного управления. При подъёме газа значения PID постепенно уменьшаются, обеспечивая лучшую стабильность в экстремальных режимах, таких как быстрые ускорения или резкие манёвры.
-
TPA особенно полезна при агрессивной настройке PID, когда на высоких оборотах происходят нежелательные вибрации и колебания.
Как работает TPA?
-
Есть два основных параметра:
-
tpa_breakpoint — точка газа, с которой начинается снижение PID. В Betaflight значение обычно указывается в диапазоне 1000-2000 (диапазон сигнала газа), например, 1500 означает, что начиная с этой отметки PID начинают снижаться линейно.
-
tpa_rate (или просто TPA) — величина ослабления PID при полном газе. Например, значение 50 означает снижение PID на 50% при полном открытии газа.
-
Сигнал газа от минимального (например, 1000) до tpa_breakpoint PID работают без изменений. Сигнал газа выше tpa_breakpoint запускает плавное линейное уменьшение PID до максимального снижения к 2000.
Как использовать и настраивать?
-
Если при высоких оборотах и резких манёврах начинаются колебания (vibrations), установить tpa_breakpoint примерно у той отметки газа, где эти проблемы начинаются (например, 1500–1750), затем постепенно увеличить tpa_rate, чтобы уменьшить колебания.
-
Нужно экспериментировать, чтобы найти баланс между чувствительностью и стабильностью.
-
Важно помнить, что TPA влияет на частоту вращения и реакцию дрона, но только при высоком газе, не ухудшая контроль на низких оборотах.
Пример настройки
| Параметр | Значение | Описание |
|---|
| tpa_breakpoint |
1500 |
Начало снижения PID при газе выше ~75% от диапазона 1000-2000 |
| tpa_rate |
50 (50%) |
Максимальное снижение PID при полном газе |
TPA Mode — это полезный инструмент для повышения стабильности управления квадрокоптером на высоких оборотах моторов, снижая нежелательные вибрации и колебания за счёт снижения PID. Его правильно настраивать стоит тогда, когда вы замечаете, что при высоком газе квадрик становится "нервным" или дергается.
Если нужна помощь с конкретными значениями TPA для вашей сборки или объяснение, как сочетать TPA с другими параметрами PID и режимами, могу помочь.
![Настройки профиля PID. Вкладка [PID Tuning] в Betaflight](data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAAEAAAABCAYAAAAfFcSJAAAABmJLR0QAmQAAAAAlVf4eAAAACXBIWXMAAAsTAAALEwEAmpwYAAAAB3RJTUUH3wwJBwcE2ifiigAAABl0RVh0Q29tbWVudABDcmVhdGVkIHdpdGggR0lNUFeBDhcAAAANSURBVAjXY2BgYGAAAAAFAAFe8yo6AAAAAElFTkSuQmCC "Настройки профиля PID. Вкладка [PID Tuning] в Betaflight")
ID 427
![Настройки профиля PID. Вкладка [PID Tuning] в Betaflight](https://technobee.ru/media/zoo/images/line101_COLOR_49c89ac335d642fa349a5fe6de74ef43.png "Настройки профиля PID. Вкладка [PID Tuning] в Betaflight")