 в Betaflight")
Вкладка Моторы (Motors Tab) в Betaflight
Вкладка "Motors" (Моторы)
Эта вкладка предназначена для настройки параметров моторов и электронных регуляторов скорости (ESC). Здесь можно изменить направление вращения моторов, настроить смешивание (миксер), а также активировать расширенные функции телеметрии и полета.
- Назначение: Настройка конфигурации расположения моторов и определение того, как полетный контроллер (FC) будет использовать моторы для поддержания стабильного полета.
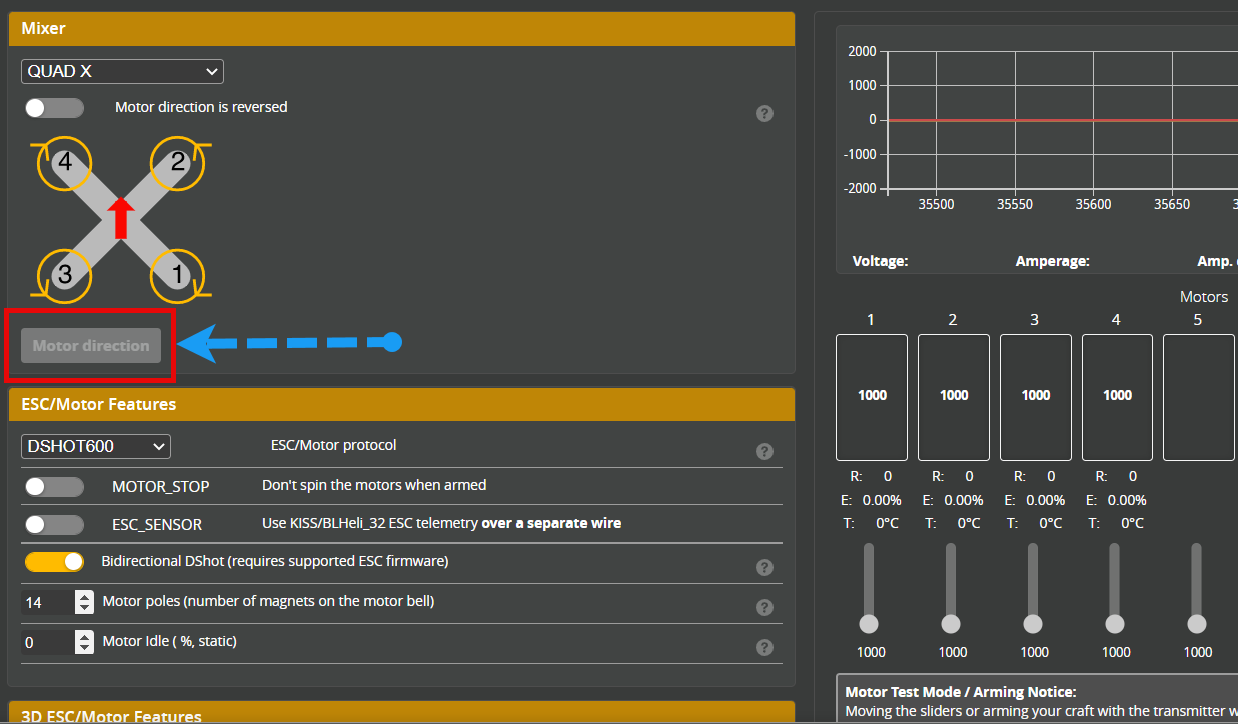
- Рекомендация: Для типичных квадрокоптеров следует использовать настройку "QUAD X". Если вы не уверены в своей конфигурации, выберите именно эту опцию.
- Направление вращения моторов:
- По умолчанию ("props in"): Предполагается, что пропеллеры будут вращаться внутрь, то есть навстречу друг другу, если смотреть на переднюю часть квадрокоптера (к камере).
- Обратное направление ("props out"): Пропеллеры вращаются наружу, то есть от камеры.
- Информация: Пилоты часто выбирают "props out", чтобы предотвратить попадание пыли и мусора в камеру. Однако при этом мусор будет направляться в корпус квадрокоптера. Эта настройка также может быть полезна для борьбы с эффектом "prop wash" (вихревые потоки от пропеллеров) на более мелких аппаратах.
- Тестирование направления моторов ("Motor direction"): При нажатии на эту кнопку открывается инструмент тестирования. Он позволяет аккуратно запустить моторы (без пропеллеров!) и легко изменить направление их вращения, чтобы оно соответствовало выбранной конфигурации миксера.
- ВАЖНО: Перед тестированием обязательно снимите все пропеллеры и будьте предельно осторожны!
Функции ESC/Моторов (ESC/Motor Features)
-
Протокол ESC/Моторов (ESC/Motor Protocol): Рекомендуется использовать DShot, так как это стандарт для современных сборок и обеспечивает наилучшую производительность и функциональность.
- Информация: Скорость работы DShot зависит от выбранной частоты цикла PID. Более медленные скорости DShot не могут отправлять обновления достаточно быстро, чтобы полностью использовать более высокие частоты цикла PID. Поэтому рекомендуется:
- 8K (частота цикла) — DShot600
- 4K (частота цикла) — DShot300
- 2K (частота цикла) — DShot150
- Другие протоколы, такие как Oneshot125, нужны только для очень старых ESC (например, оригинальных BLHELI). Новые ESC (BLHeli_S, BLHeli_32, BlueJay или AM32) должны использовать DShot.
- Информация: Скорость работы DShot зависит от выбранной частоты цикла PID. Более медленные скорости DShot не могут отправлять обновления достаточно быстро, чтобы полностью использовать более высокие частоты цикла PID. Поэтому рекомендуется:
-
Остановка моторов (MOTOR_STOP): Предотвращает вращение моторов на холостом ходу после включения питания (армирования).
-
ВАЖНО: Обычно эта функция не требуется. Считается более безопасным оставлять моторы вращающимися на холостом ходу, так как это позволяет окружающим видеть, что квадрокоптер включен и готов к полету.
-
Поведение моторов при армировании в зависимости от настроек:
AIRMODE Отключен & MOTOR_STOP ВключенМоторы остаются выключенными до тех пор, пока не будет увеличен газ.AIRMODE Отключен & MOTOR_STOP ОтключенМоторы вращаются на холостом ходу сразу после армирования.AIRMODE ВключенМоторы всегда вращаются при армировании, даже при нулевом газе.
-
-
Датчик ESC (ESC_SENSOR): Предпочитать данные телеметрии от ESC, полученные через UART-соединение, настроенное во вкладке "Ports".
- Двунаправленный DShot (Bidirectional DShot): Требуется для фильтрации оборотов (RPM). Вместо того чтобы только отправлять команды DShot на ESC через выходные каналы моторов, полетный контроллер также будет слушать возвращаемые данные от ESC по тому же проводу.
- Примечание: По умолчанию включает только данные об оборотах (RPM), но может быть расширен с помощью команды
dshot_edtв CLI для включения данных о напряжении, токе и температуре ESC через телеметрию DShot (требуется новая прошивка ESC, такая как BlueJay/AM32/BLHELI32). Расширенная телеметрия DShot (EDT) позволяет ESC возвращать данные по сигнальному проводу без необходимости дополнительных UART-соединений. Это упрощает подключение и настройку FC для пилотов.
- Примечание: По умолчанию включает только данные об оборотах (RPM), но может быть расширен с помощью команды
- Количество полюсов мотора (Motor poles): Указывает количество постоянных магнитов, установленных внутри колокола мотора.
- Информация: Более крупные моторы, такие как 2207 или 2306, обычно имеют 14 магнитов, тогда как моторы 1103 и меньшего размера имеют 12 магнитов. Количество магнитов обычно меняется с 12 на 14 в моторах размером 14xx/15xx.
- Холостой ход мотора (% статический) (Motor idle (% static)): Устанавливает минимальное значение выходного сигнала мотора, чтобы обеспечить плавное увеличение оборотов с холостого хода без задержек и потери контроля.
- Информация: Обычно это значение увеличивают для улучшения плавности при выходе из пикирования и уменьшают, чтобы избежать нежелательной направленной вниз тяги во время перевернутых маневров.
Функции ESC/Моторов для 3D-полета (3D ESC/Motor Features)
-
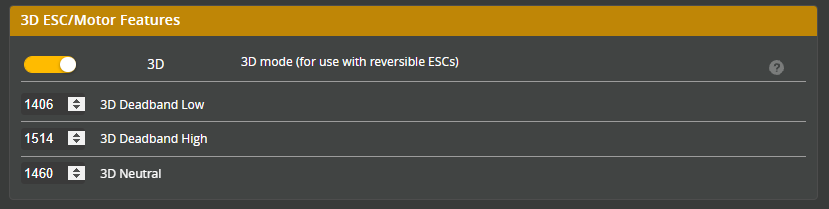
3D (Включить 3D-режим): Позволяет моторам работать в обоих направлениях, что необходимо для выполнения перевернутого полета. В этом режиме нулевой газ соответствует положению 50% стика, самое нижнее положение стика дает максимальную отрицательную тягу, а самое верхнее — максимальную положительную тягу.
- Информация: Режим Air Mode работает некорректно при использовании 3D-режима. Вам следует отключить постоянный Air Mode во вкладке "Configuration" и настроить Air Mode на переключатель во вкладке "Modes", чтобы Air Mode отключался при активации 3D-режима. Просто установите диапазон "Air Mode" на тот же канал переключателя и значения, что и для "Disable 3D Mode".
- ОПАСНОСТЬ: Функции GPS Rescue (спасение по GPS) и Failsafe Landing Mode (режим аварийной посадки) не реализованы в 3D-режиме и не будут работать корректно. Будьте крайне осторожны!
-
3D Deadband low: Начало зоны нулевой тяги в 3D-режиме, где тяга не требуется.
-
3D Deadband high: Конец зоны нулевой тяги в 3D-режиме, где тяга не требуется.
-
3D Deadband neutral: Середина зоны нулевой тяги в 3D-режиме, где тяга не требуется.
Режим тестирования моторов (Motors Test Mode)
- ВАЖНО: Будьте предельно осторожны при тестировании моторов на столе. Внимательно прочитайте этот раздел, если вы не уверены в своих действиях. Всегда соблюдайте меры безопасности при работе с литиевыми аккумуляторами. Если вы сомневаетесь, рассмотрите возможность использования устройств безопасности, таких как Smoke Stoppers, которые ограничивают ток от аккумулятора.
- ОПАСНОСТЬ: Всегда снимайте пропеллеры перед подключением аккумулятора и тестированием моторов. Вы будете многократно слышать это предупреждение по веской причине. Пожалуйста, будьте осторожны!
- Визуализация текущего сигнала моторов: Пропеллеры должны быть сняты перед тестированием моторов. После подключения аккумулятора и выхода ESC в онлайн-режим, моторы можно запустить с помощью ползунков.
- Индикаторы телеметрии:
- R: Обороты (RPM) от ESC.
- E: Ошибка телеметрии DShot. Покажет ошибки, если ESC не включен. Включенный ESC должен показывать 0% ошибок или значение, очень близкое к 0%. Ошибки 1% или выше обычно указывают на аппаратную проблему. Телеметрия DShot требует современной прошивки ESC, такой как BlueJay, AM32 или BLHELI32.
- T: Температура от ESC.
Примечание к интерфейсу на скриншоте выше:
На приведенном выше скриншоте видно, что выбран миксер "QUAD X". Направление моторов не является обратным (выключен переключатель "Motor direction is reversed"). Протокол установлен на DSHOT600. Включены функции Bidirectional DShot и ESC_SENSOR. Количество полюсов мотора установлено на 14. Значение холостого хода мотора — 0%. Все четыре мотора (1-4) показывают значение 1000 (вероятно, это значение сигнала или оборотов в режиме ожидания/теста). Под каждым мотором отображаются данные телеметрии: R (обороты), E (ошибки - 0.00%), T (температура - 0°C). Ползунки управления моторами находятся в положении 1000, а главный ползунок (Master) — в крайнем правом положении.
 в Betaflight")