Стандарт разъёмов Betaflight
31 декабря 2025
Технику БПЛА | Разработчику
Введение
Использование дронов стремительно растёт в последние годы, наряду с этим развивается сообщество и появляется множество типов дронов на рынке. Многие производители выпускают дроны и компоненты, однако отсутствие стандартизации привело к проблемам совместимости между деталями.
Эта фрагментация затрудняет пользователям сборку и обслуживание мультироторных дронов. По мере расширения отрасли необходимость в стандартизированных компонентах становится всё очевиднее.
Для решения этой проблемы команда Betaflight разработала стандарт разъёмов для дронов, направленный на обеспечение совместимости компонентов от разных производителей. Данный стандарт снижает путаницу, упрощает сборку и обслуживание, а также делает индустрию дронов более эффективной и экономичной.
Стандарты разъёмов / требования
1. Доступность
Любой переходник должен быть широко доступен и легко приобретаем. Он должен поставляться из нескольких источников и быть легко доступен у любого из них.
Примечание: Предпочтительно использовать жёлтые разъёмы, чтобы чётко обозначить применение нового стандарта. Для текущих продуктов Betaflight рекомендует поставлять также переходник старого образца (legacy harness).
2. JST SH — принимается как основной стандарт разъёмов
Серия JST-SH — это широко используемый и надёжный разъём, зарекомендовавший себя как прочное решение для применения в дронах. Этот разъём должен стать стандартом для всех производителей дронов, обеспечивая совместимость компонентов от разных производителей.
3. JST GH — опциональный разъём
Некоторые производители используют другое ПО, например ArduPilot или Pixhawk, у которых есть собственные стандарты. Эти типы разъёмов являются опциональными для производителей дронов, позволяя им выбирать наиболее подходящий вариант использования, при условии, что они поставляют переходники для обеих платформ.
Конфигурация выводов ESC
Рекомендуется использовать витую пару проводов, чтобы избежать путаницы с зеркальным расположением контактов и обеспечить одинаковый порядок подключения с обеих сторон соединения.
Линия V+ от ESC к полётному контроллеру (FC) обычно передаёт напряжение VBAT напрямую от аккумулятора. При этом V+ на разъёмах RX, GPS и других периферийных устройств подаётся с регуляторов напряжения, встроенных в FC.
В некоторых случаях разъёмы VTX или камеры могут получать напряжение VBAT напрямую, но из-за скачков напряжения, вызванных работой моторов, прямое подключение VBAT к VTX или камерам не рекомендуется. Для минимизации риска повреждения чувствительного оборудования VTX рекомендуется использовать отдельный регулятор высокого напряжения. Рекомендуемая непрерывная мощность такого регулятора — около 18 Вт, что соответствует как минимум 9 В / 2 А. Выходное напряжение должно находиться в диапазоне 8–12 В, предпочтительно — 10 В.
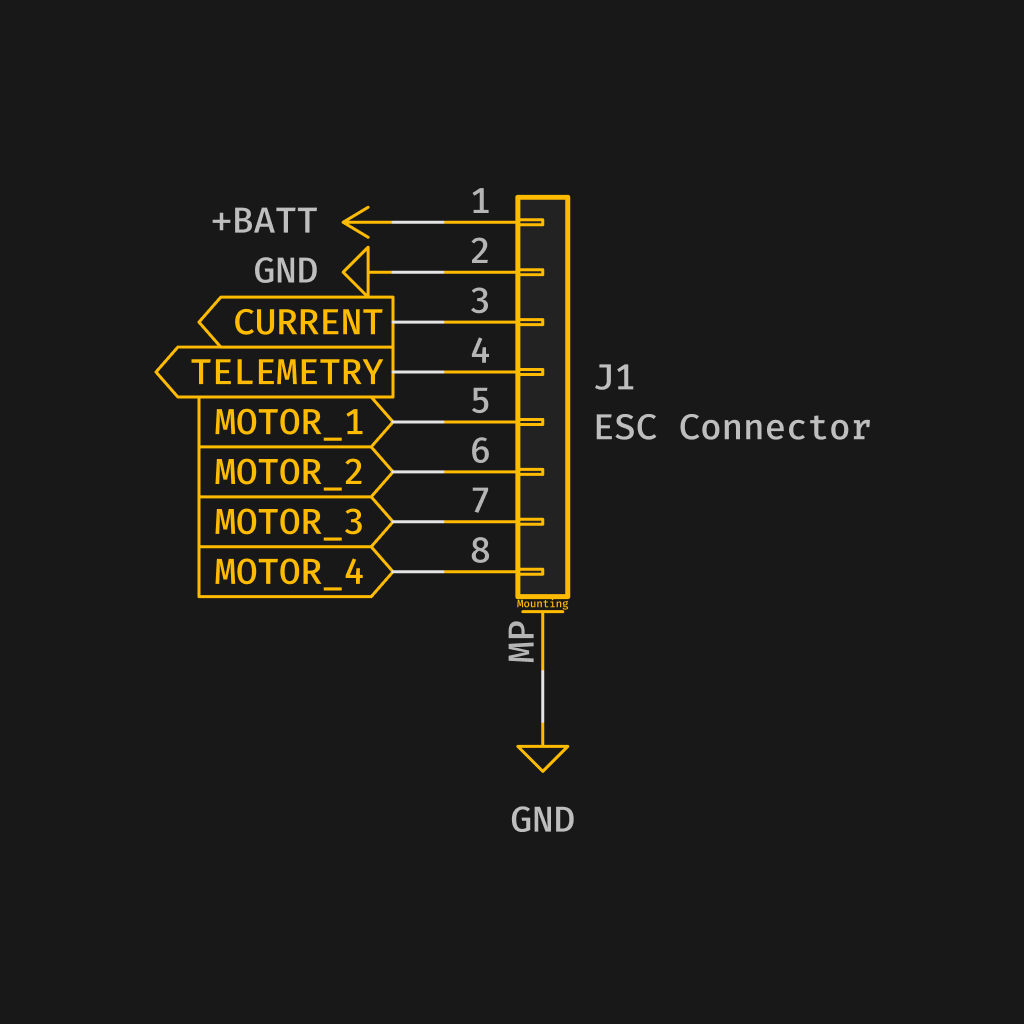
Стандартная конфигурация выводов ESC (8-пиновый JST SH)
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (VBAT) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Current |
Ток |
| 4 |
Telemetry |
Телеметрия |
| 5 |
Signal 1 |
Мотор 1 |
| 6 |
Signal 2 |
Мотор 2 |
| 7 |
Signal 3 |
Мотор 3 |
| 8 |
Signal 4 |
Мотор 4 |
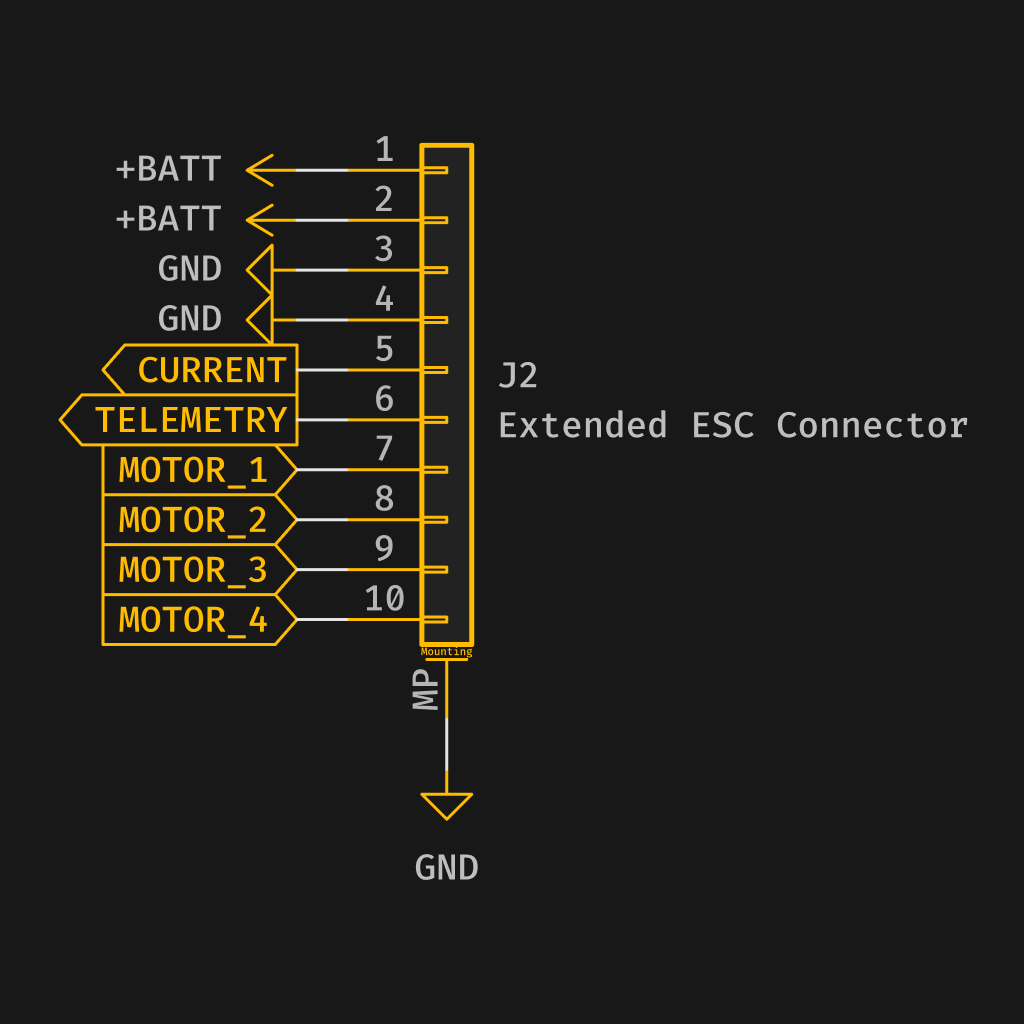
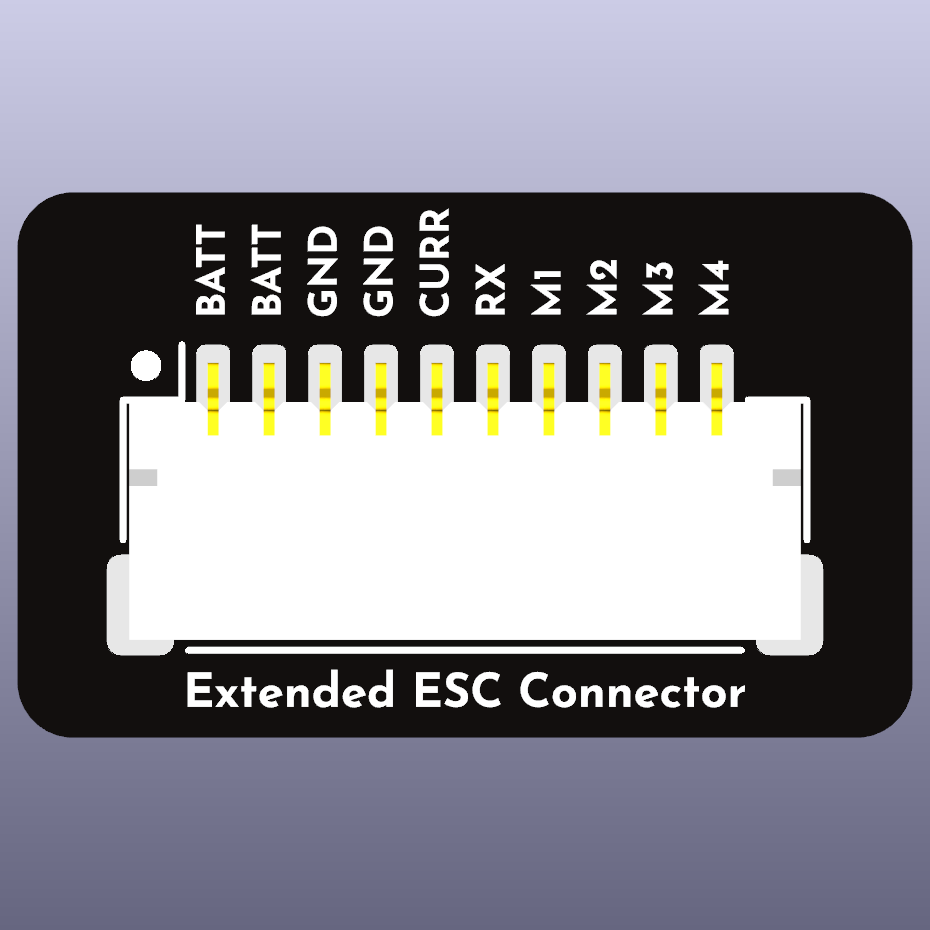
ESC с повышенными требованиями к питанию
Дополнительный 2-пиновый разъём питания (внешнее питание) может использоваться для устройств с высоким энергопотреблением или при использовании внешнего источника питания. Альтернативно может применяться 10-пиновый разъём:
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (VBAT) |
Питание |
| 2 |
V+ (VBAT) |
Питание |
| 3 |
GND |
Земля |
| 4 |
GND |
Земля |
| 5 |
Current |
Ток |
| 6 |
Telemetry |
Телеметрия |
| 7 |
Signal 1 |
Мотор 1 |
| 8 |
Signal 2 |
Мотор 2 |
| 9 |
Signal 3 |
Мотор 3 |
| 10 |
Signal 4 |
Мотор 4 |
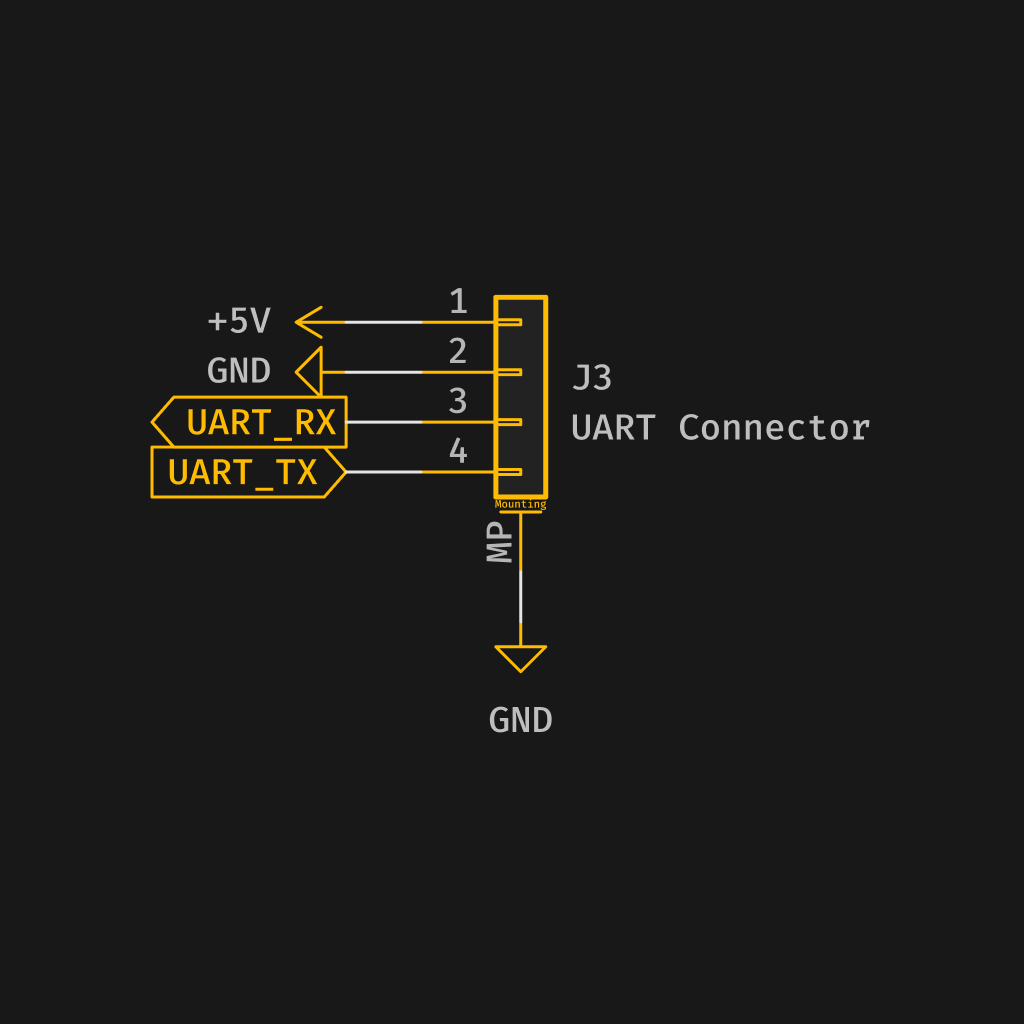
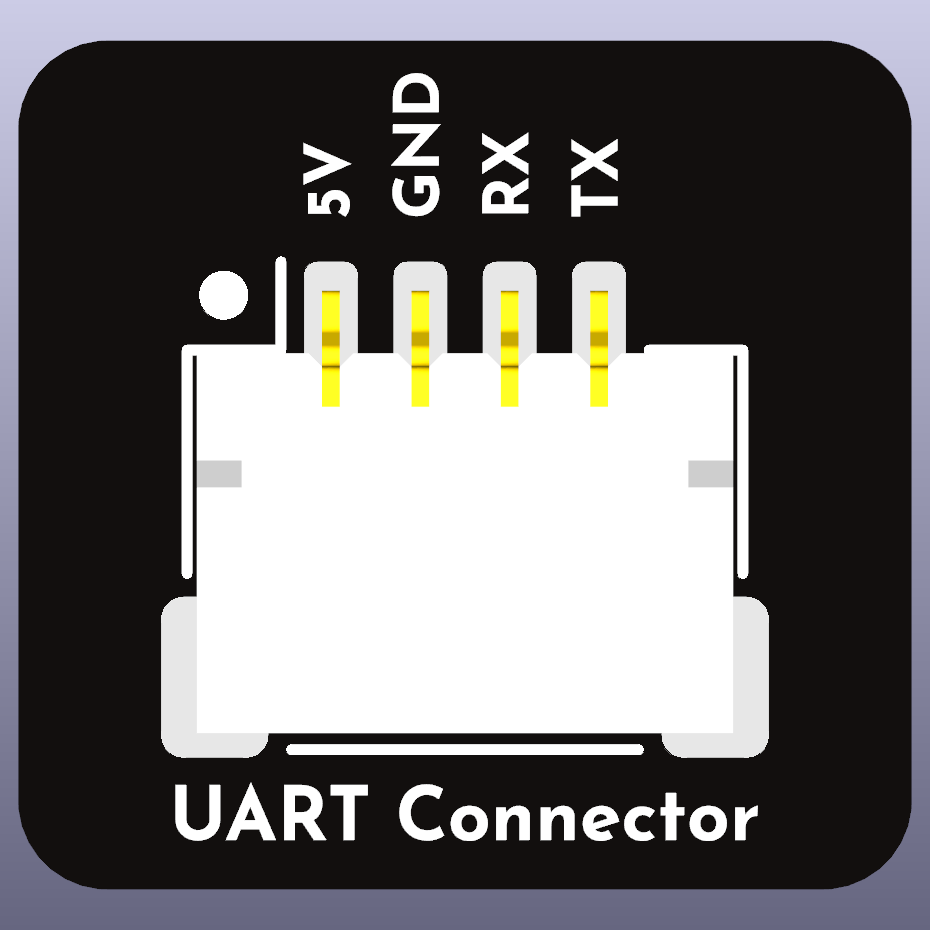
Конфигурация выводов последовательного интерфейса (UART) — RX, GPS и другие 5 В устройства
4-пиновый JST SH разъём
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (5 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
RX |
| 4 |
Signal 2 |
TX |
Примечание: Этот разъём может использоваться для любого количества последовательных устройств.
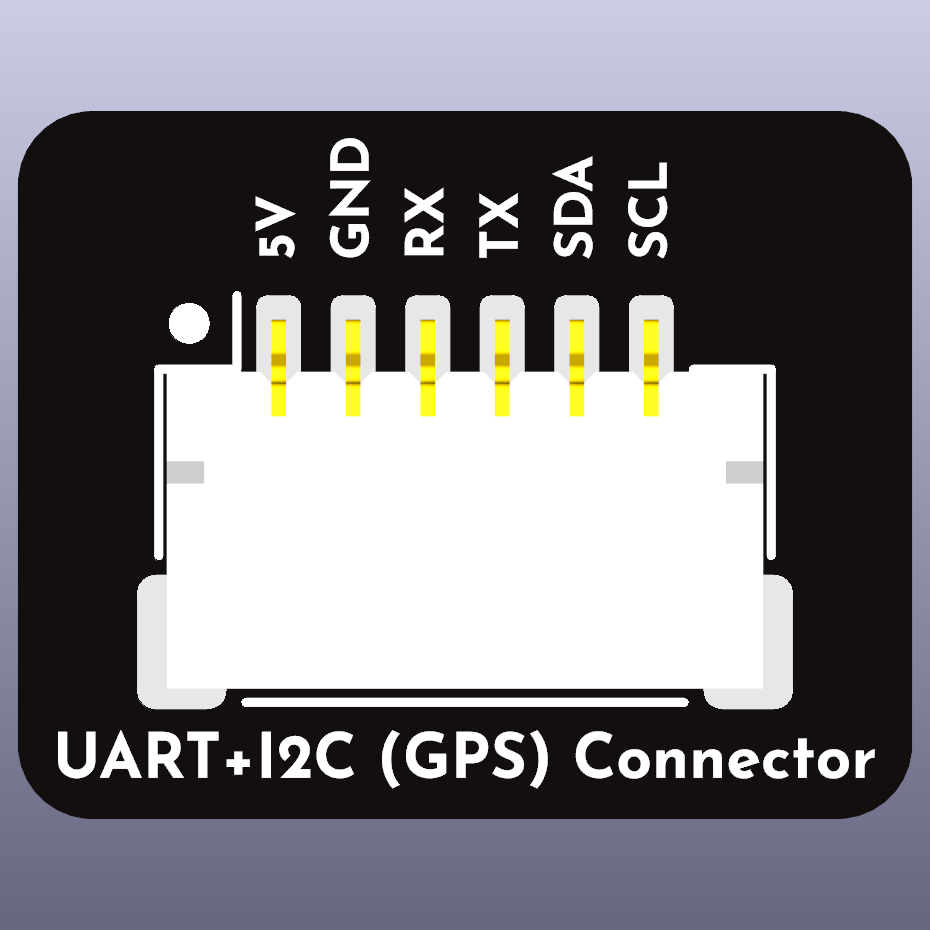
Если модуль GPS использует 6-пиновый кабель (например, из-за наличия магнитометра и необходимости подключения I²C), то следует использовать Y-кабель и задействовать одновременно 4-пиновый UART и I²C разъёмы. Следует отметить, что не рекомендуется размещать магнитометр и GPS в одном корпусе.
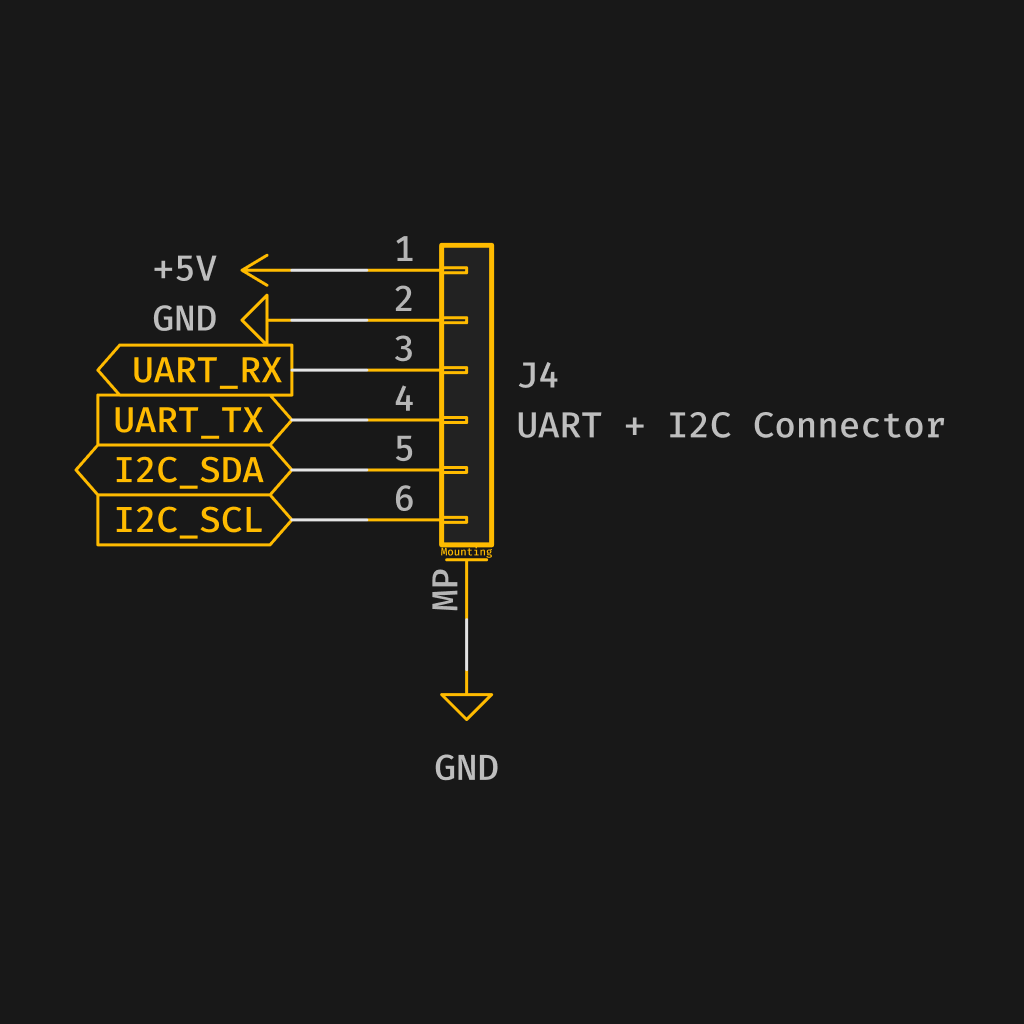
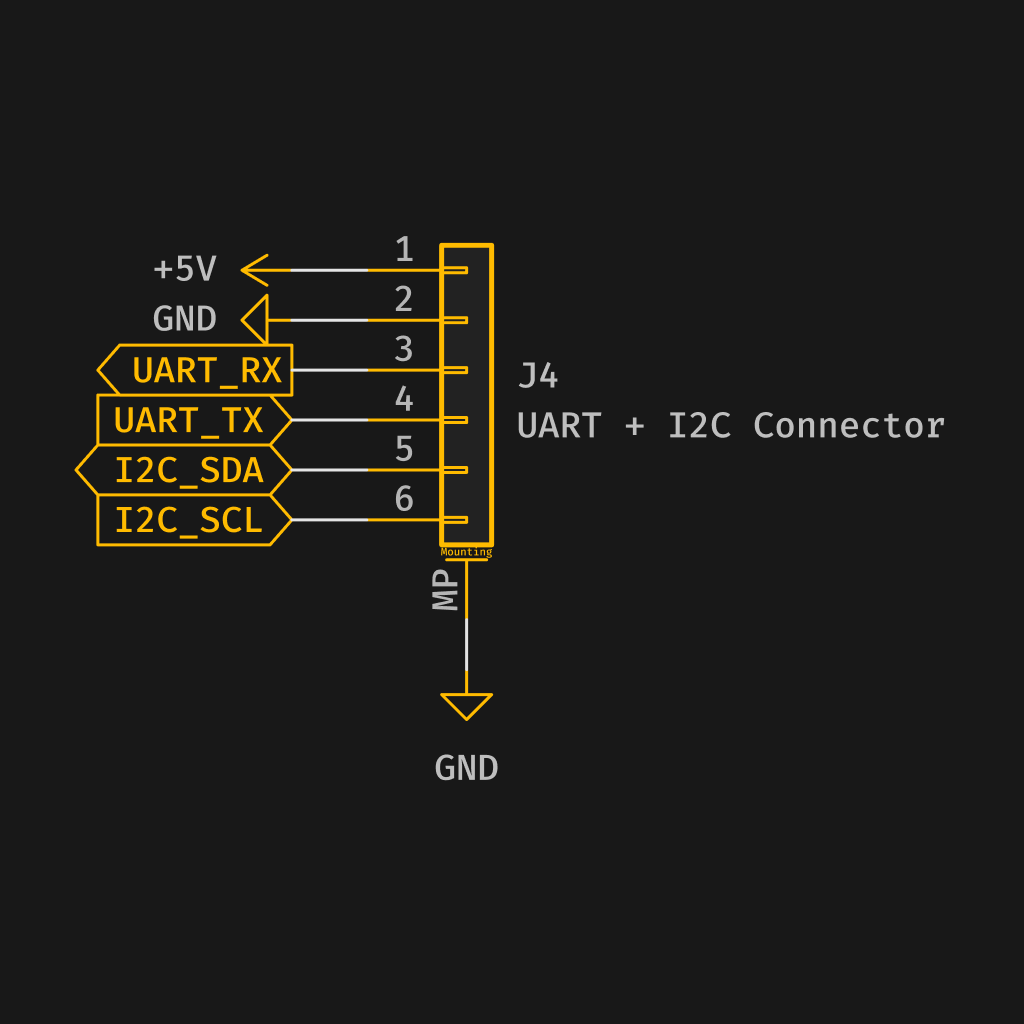
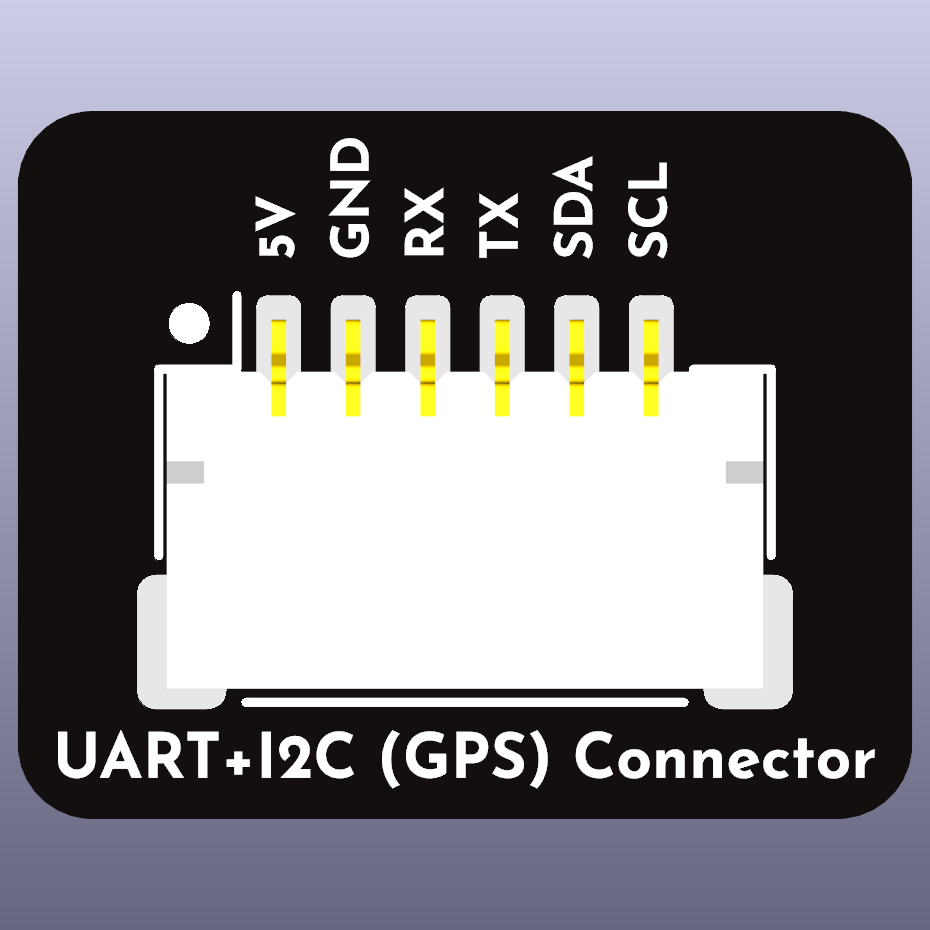
6-пиновый JST SH разъём (UART + I²C)
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (5 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
RX |
| 4 |
Signal 2 |
TX |
| 5 |
Signal 3 |
I²C SDA |
| 6 |
Signal 4 |
I²C SCL |
Примечание: Хотя 6-пиновый вариант больше не рекомендуется, если он всё же используется в конструкции, необходимо чётко маркировать разъёмы, чтобы пользователи не подключали 5 В оборудование к 6-пиновому цифровому VTX с другим напряжением питания — это может привести к повреждению устройств.
Конфигурация выводов I²C
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (5 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
SDA |
| 4 |
Signal 2 |
SCL |
Примечание: Разъём I²C должен использоваться для всех устройств I²C, включая компасы (магнитометры), барометры и другие датчики.
На STM-устройствах выводы совместно используются с PB10 и PB11 для TX3 и RX3, поэтому при использовании встроенных I²C-устройств (например, компасов и барометров) это следует учитывать.
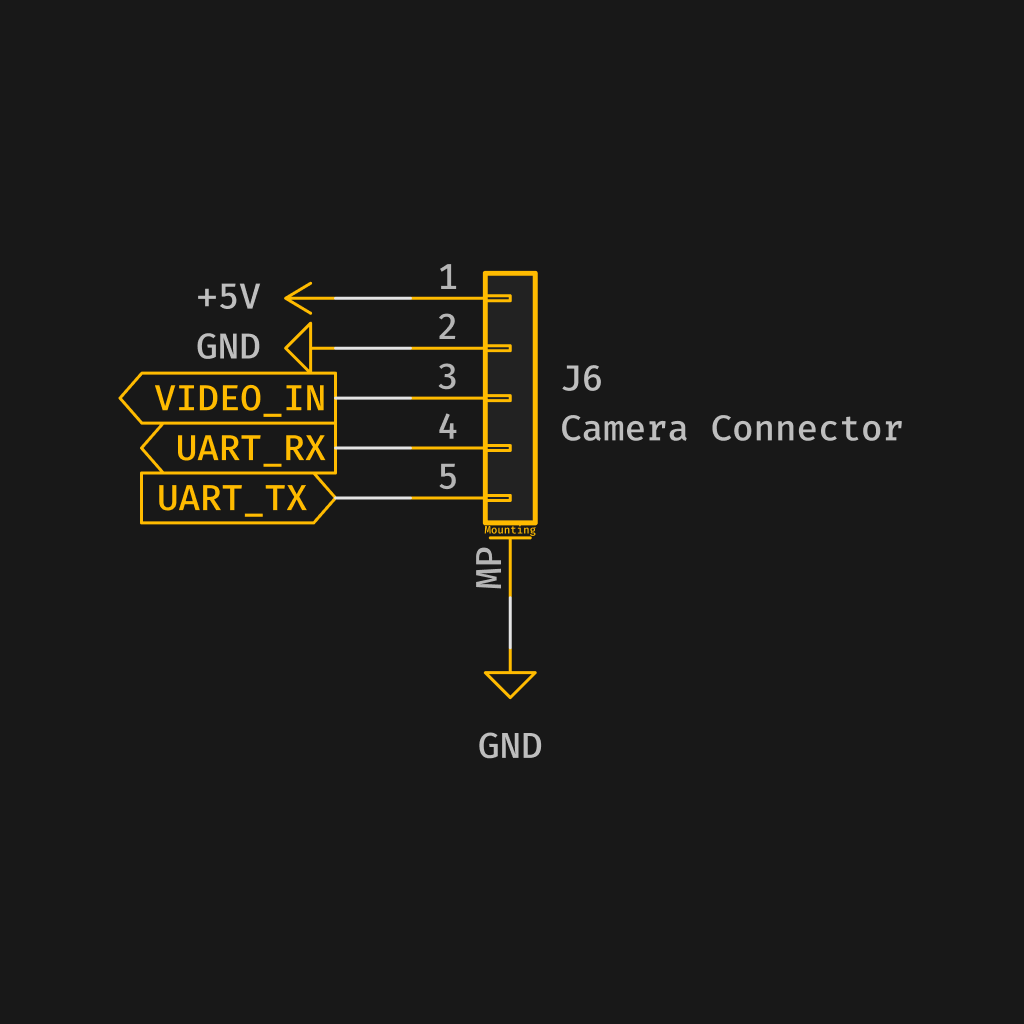
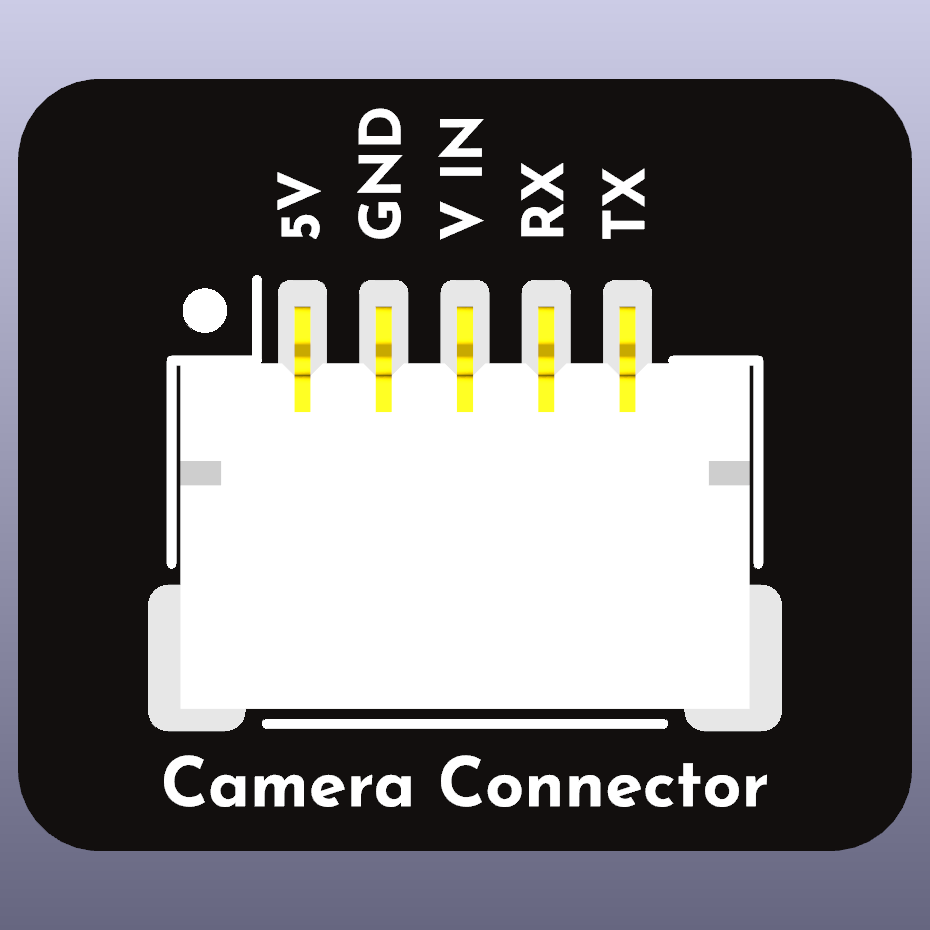
Конфигурация выводов аналоговой камеры
Примечание: Наличие аналогового OSD-чипа на полётном контроллере больше не рекомендуется. Предпочтительно эмулировать цифровой стандарт и размещать OSD-чип непосредственно на VTX. В этом случае сигнал Video (Signal 1) становится избыточным.
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (5 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
Видео |
| 4 |
Signal 2 |
RX |
| 5 |
Signal 3 |
TX |
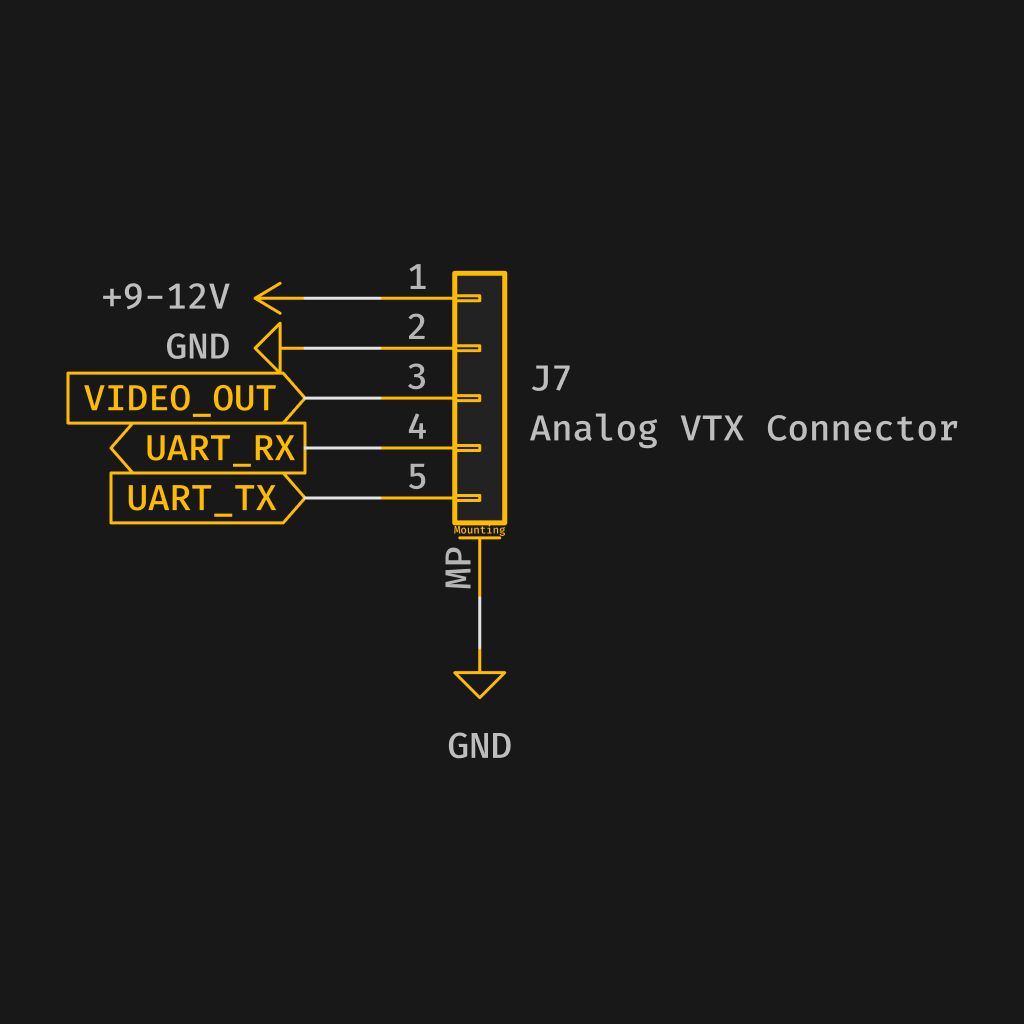
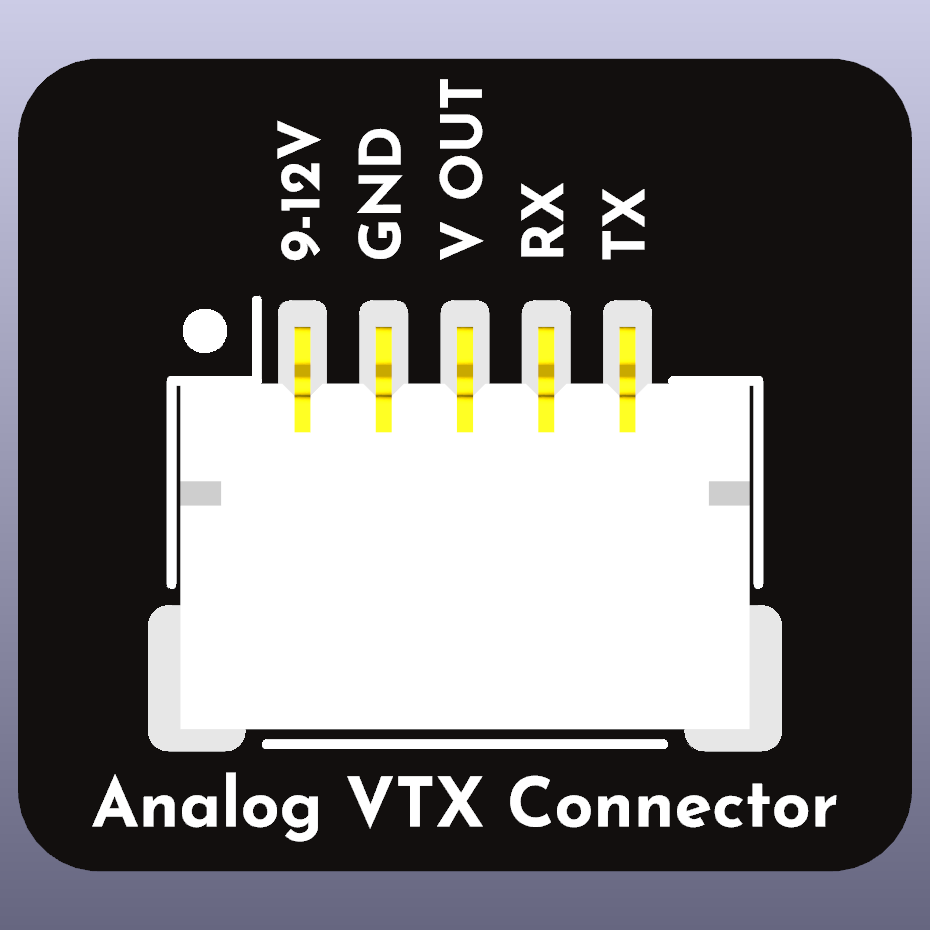
Конфигурация выводов VTX (аналоговый)
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (8–12 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
Видео |
| 4 |
Signal 2 |
RX |
| 5 |
Signal 3 |
TX |
Примечание: Для питания аналогового VTX предпочтительно использовать стабилизированное напряжение 10 В.
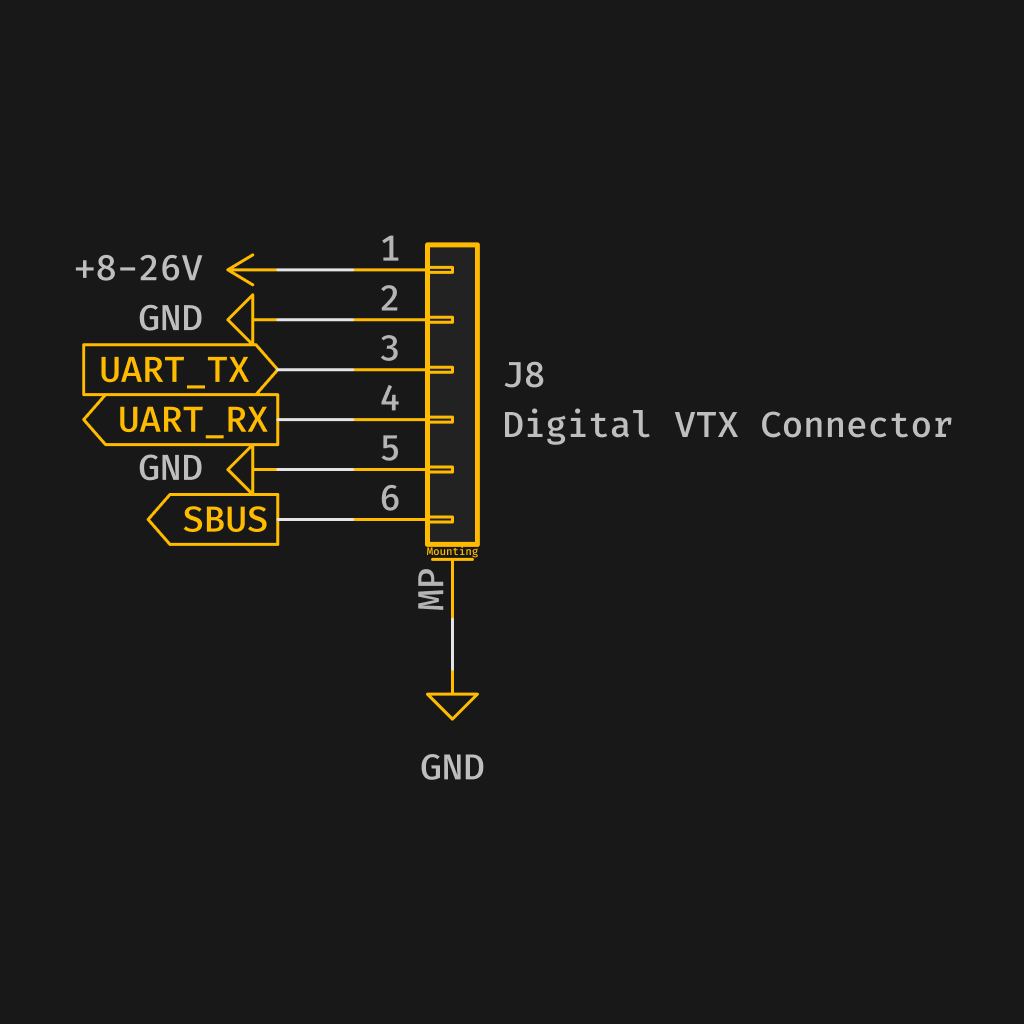
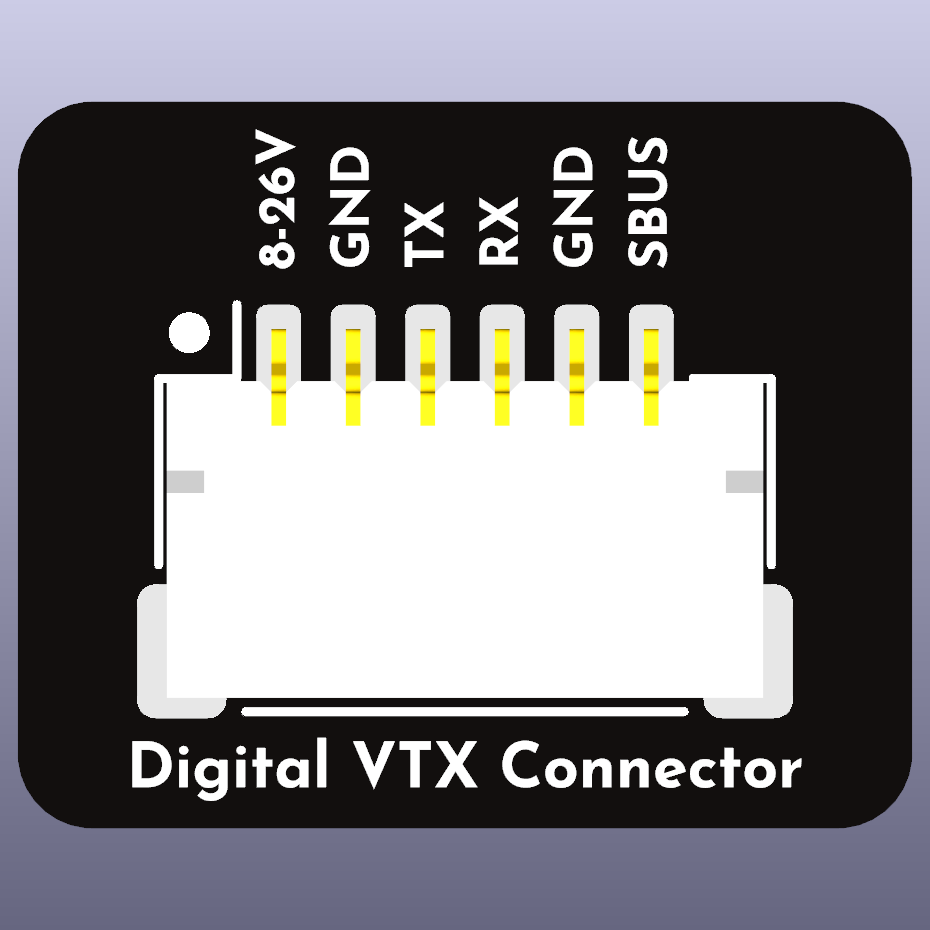
Конфигурация выводов цифрового видеопередатчика (Digital VTX)
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (8–26 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
TX |
| 4 |
Signal 2 |
RX |
| 5 |
GND |
Земля (DJI) |
| 6 |
Signal 3 |
SBUS (DJI) |
Примечание: Для питания цифрового видеопередатчика предпочтительно использовать напряжение 10 В.
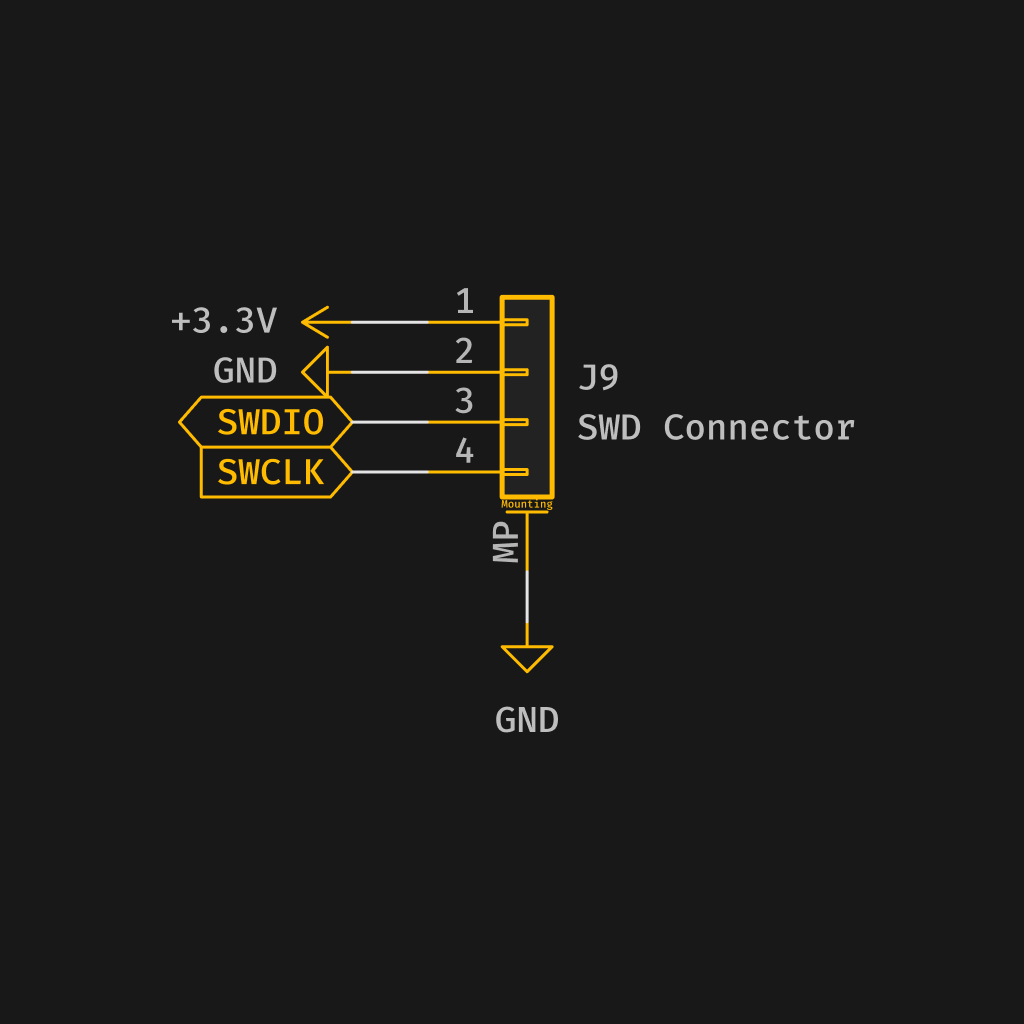
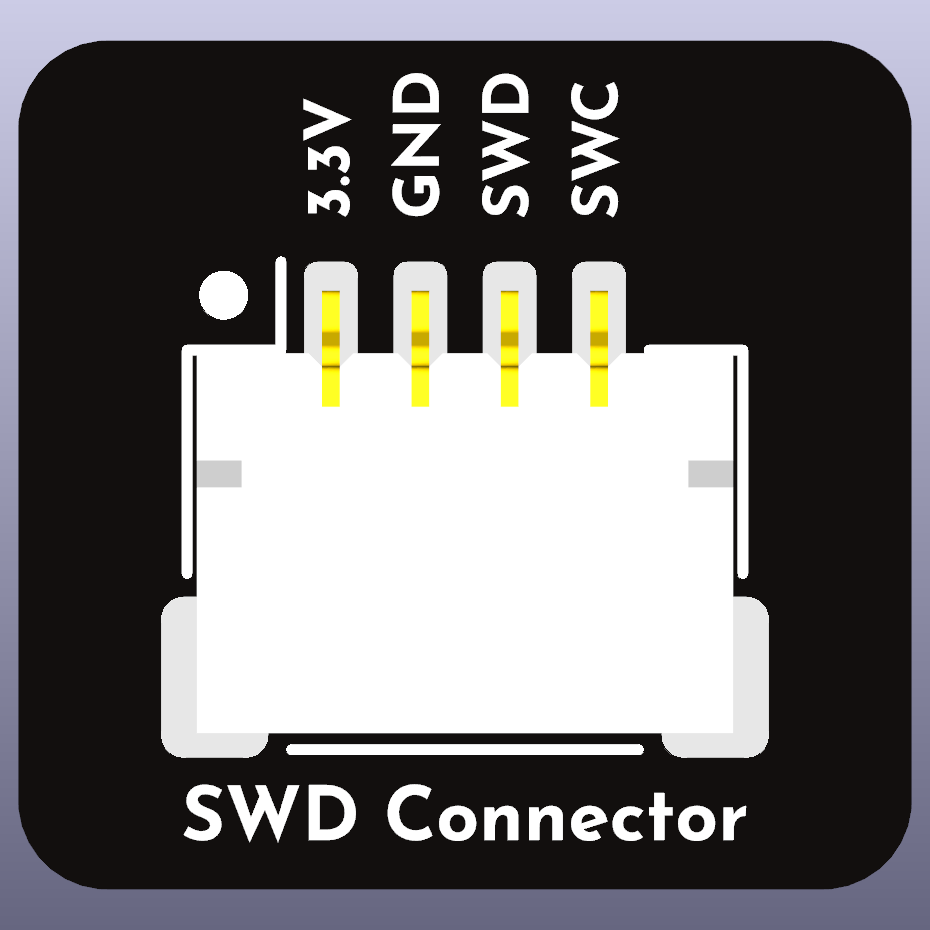
Конфигурация выводов SWD
| № пина | Название сигнала | Описание |
|---|
| 1 |
V+ (3.3 В) |
Питание |
| 2 |
GND |
Земля |
| 3 |
Signal 1 |
SWDIO |
| 4 |
Signal 2 |
SWCLK |
Примечание: Этот разъём рекомендуется размещать на прототипах плат, поставляемых команде Betaflight для отладки и тестирования.

800