

![Настройка фильтров в Betaflight [PID Tuning].[Filter Settings]](https://technobee.ru/media/zoo/images/line100_e55124e8df4ca2de89b79772b6c970be.png "Настройка фильтров в Betaflight [PID Tuning].[Filter Settings]")
Настройка фильтров в Betaflight [PID Tuning].[Filter Settings]
Физически сигналы от гироскопа поступают в пилотный контроллер через PID регулятор, который призван оценивать текущее состояние положения дрона и вырабатывать сигнал, компенсирующий ошибку позиционирования.
Фильтрация сигналов от гироскопа в пилотном контроллере квадрокоптера необходима для удаления лишнего шума и вибраций, которые могут негативно влиять на работу PID-контроллера и, соответственно, на стабильность и управляемость квадрокоптера.
Основные причины и задачи фильтрации:
-
Сигнал с гироскопа содержит широкий спектр частот — от низких (0-80 Гц), которые отражают реальные движения квадрокоптера, до высокочастотных шумов (до 1000 Гц), вызванных вибрациями моторов и механическими колебаниями рамы.
-
PID-контроллер, особенно его D-компонента, чувствителен к шумам и вибрациям. Усиление шума в D-term может привести к осцилляциям, вибрациям и перегреву моторов.
-
Фильтры нижних частот (Low Pass Filter, LPF) пропускают полезный низкочастотный сигнал и ослабляют высокочастотный шум, тем самым улучшая качество сигнала для PID-контроллера.
-
Для удаления узкополосных шумов, например, вибраций от моторов на конкретных частотах, применяются фильтры Notch, которые "вырезают" шум на определённой частоте.
-
Фильтрация позволяет PID-контроллеру работать с более чистым и стабильным сигналом, что улучшает поведение квадрокоптера в полёте, снижает нагрузку на моторы и предотвращает перегрев.
-
Однако чрезмерная фильтрация увеличивает задержку сигнала, что негативно сказывается на реакции PID-контроллера, поэтому важно балансировать степень фильтрации.
Таким образом, фильтрация сигналов гироскопа в пилотном контроллере квадрокоптера — это процесс удаления высокочастотных шумов и вибраций, чтобы обеспечить точное и стабильное управление аппаратом, улучшить качество полёта и продлить ресурс моторов и электроники.
![]()
Настройки фильтров
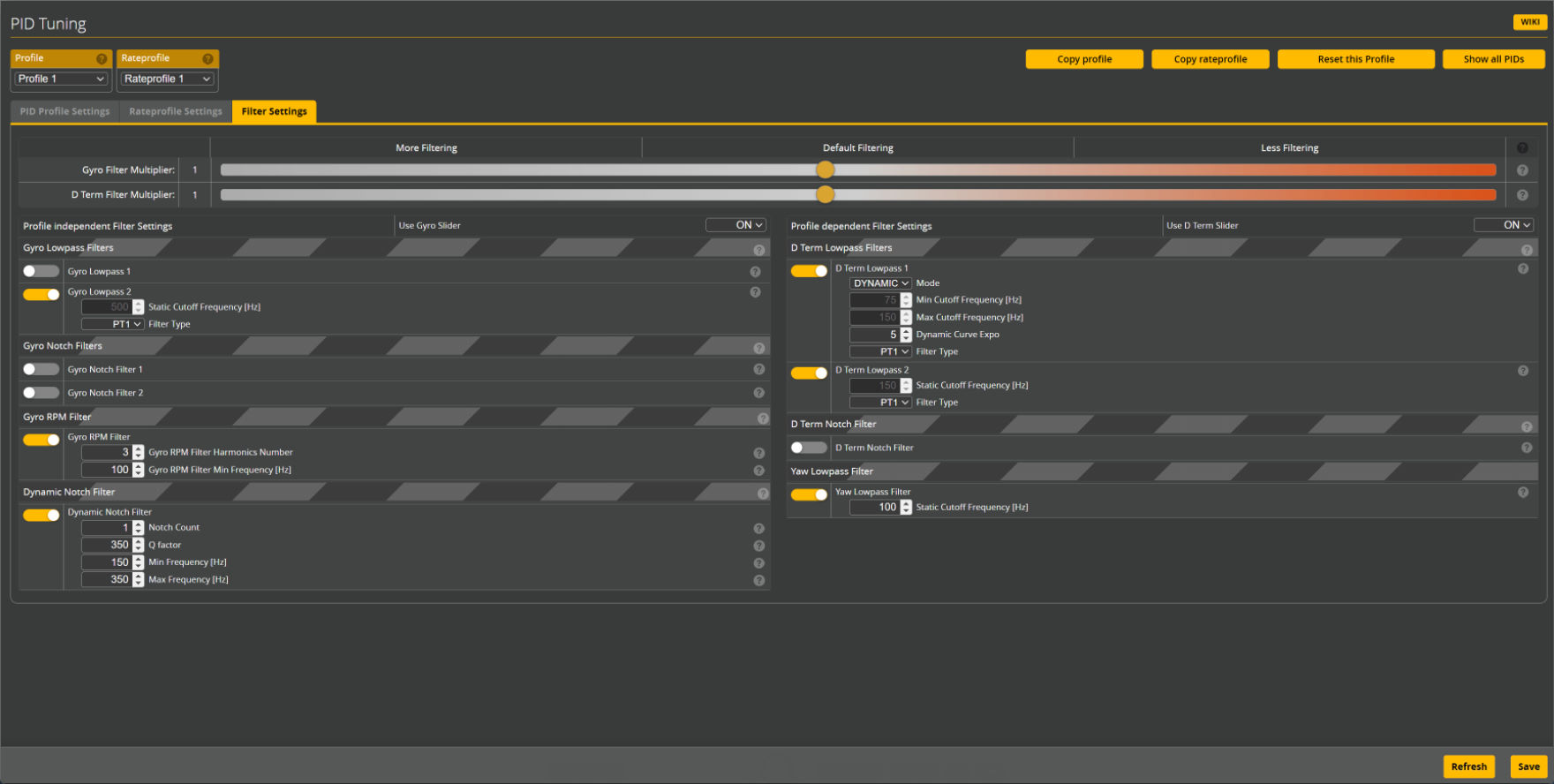
Ползунки фильтров
| Параметр | Описание |
|---|---|
| Gyro Filter Multiplier |
Изменяет частоты среза низкочастотного фильтра гироскопа.
При перемещении ползунка вправо для улучшения обработки эффекта пропвоша (propwash) будьте осторожны, чтобы не зайти слишком далеко. Это позволит больше шума проходить через компоненты P и D, что может привести к потере управления (fly-aways) или сгоранию моторов. Если у вас есть проблемы с резонансом рамы, изношенными подшипниками, повреждёнными пропеллерами, перегревом моторов и т.п., возможно, потребуется переместить ползунок влево. Фильтрация гироскопа применяется до и дополнительно к фильтрации компоненты D. |
| D Filter Multiplier |
Изменяет частоты среза низкочастотного фильтра D-компоненты (D-term).
D-компонента — самый чувствительный элемент PID к шуму и резонансам. Она может усиливать высокочастотный шум в 10–100 раз. Поэтому частоты среза фильтра D-компоненты значительно ниже, чем у фильтров гироскопа. Фильтрация D-компоненты применяется после и дополнительно к фильтрации гироскопа. Стандартные настройки фильтрации D-компоненты оптимальны для большинства аппаратов и редко требуют изменения. Перемещение ползунка влево снижает нагрев моторов на шумных аппаратах и при высоких настройках PID по D, но может привести к увеличению эффекта пропвоша и резонансам D-компоненты на более низких частотах. Перемещение ползунка вправо не рекомендуется, но может улучшить пропвош на хорошо собранных (чистых) аппаратах. Однако это может вызвать скрежет моторов при включении, внезапные резонансы в полёте и серьёзный перегрев моторов. |
Фильтры, независящие от профиля
| Параметр | Описание |
|---|---|
| Use Gyro Filter Slider | Включает/выключает фильтрацию сигналов от гироскопа. |
| Lowpass Gyro 1 |
Использование гироскопического фильтра низких частот 1 (Gyro Lowpass 1) в динамическом режиме было важно при использовании раннего кода динамического полосового фильтра (нотч). В прошивке версии 4.3 Gyro Lowpass 1 обычно можно полностью отключить при использовании RPM-фильтрации, если только гироскоп не имеет отсутствующей внутренней аппаратной фильтрации. В динамическом режиме фильтрация сильнее на низких оборотах мотора (низком газе), а с увеличением газа фильтрация ослабевает и задержка уменьшается. Переход от низкой к высокой частоте среза происходит раньше при увеличении газа, особенно при высоких значениях экспоненты (expo) для Gyro Lowpass. В статическом режиме частота среза фиксирована. Тип фильтра по умолчанию — PT1. Фильтрация более высокого порядка обычно не требуется. |
| Lowpass Gyro 2 |
Этот фильтр работает в цикле гироскопа, фильтруя сигнал до того, как он попадёт в PID-цикл. Он всегда работает в статическом режиме с фиксированной частотой среза. Если частота PID-цикла меньше частоты гироскопа (например, PID 4 кГц и гироскоп 8 кГц), этот фильтр должен оставаться включённым, чтобы избежать проблем с алиасингом из-за понижения частоты с 8 кГц до 4 кГц. Одна настройка Gyro Lowpass 2 с частотой среза в диапазоне от 500 до 1000 Гц хорошо работает в Betaflight 4.3 и выше для чистых сборок с активной RPM-фильтрацией и стандартной фильтрацией D-компоненты. |
| Gyro Notch Filter 1 |
Применяет статический (с постоянной частотой) режекторный (notch) фильтр к сигналу гироскопа на заданной центральной частоте. Может быть полезен для изолированных резонансов с постоянной частотой, которые влияют как на компоненты P, так и D. Чтобы фильтр был эффективен, резонансная частота должна оставаться постоянной во всём диапазоне газа. Ширина выреза задаётся частотой среза. Обычно частоту среза устанавливают на 10–40% ниже центральной частоты. Следует избегать установки notch-фильтров ниже 100 Гц, кроме особых случаев. |
| Gyro Notch Filter 2 |
Применяет второй статический (с постоянной частотой) режекторный (notch) фильтр к сигналу гироскопа. Этот фильтр редко требуется и должен использоваться только в крайнем случае для борьбы со вторым резонансом с фиксированной частотой, который нельзя устранить другими способами. |
| Gyro RPM** Filter Harmonics Number | Количество гармоник на один мотор. Значение 3 (рекомендуется для большинства аппаратов) создаст по 3 режекторных (notch) фильтра на каждый мотор для каждой оси, всего 36 фильтров. Один фильтр на основной частоте мотора и два — на гармониках, кратных этой основной частоте. |
| Gyro RPM Filter Min Frequency [Hz] | Минимальная частота, которая будет использоваться RPM-фильтром. |
**RPM-фильтрация — это набор режекторных (notch) фильтров на гироскопе, которые используют телеметрию оборотов моторов (RPM) для точного удаления шума от моторов с хирургической точностью.
Динамический режекторный фильтр
Динамический режекторный фильтр отслеживает пиковые значения частоты шума двигателей и устанавливает режекторные фильтры на этих частотах независимо для каждой оси.
| Параметр | Описание |
|---|---|
|
Notch Count |
Устанавливает количество динамических режекторных (notch) фильтров на каждую ось. При включённой RPM-фильтрации рекомендуется значение 1 или 2. Без RPM-фильтрации рекомендуется значение 4 или 5. Меньшее количество фильтров уменьшит задержку фильтрации, но может повысить температуру моторов. |
|
Q Factor |
Регулирует, насколько узкими или широкими будут динамические режекторные (notch) фильтры. Более высокое значение делает фильтр уже и точнее, а более низкое — шире и менее избирательным. Очень низкое значение значительно увеличит задержку фильтра. |
|
Min Frequency [Hz] |
Установите минимальную частоту входящего шума, которую необходимо контролировать динамическим режекторным фильтром. |
|
Max Frequency [Hz] |
Установите максимальную частоту входящего шума, которую необходимо контролировать динамическим режекторным фильтром. |
Фильтры, зависящие от профиля
Эти настройки зависят от выбранного профиля и применяются к нему.
Use D Term Slider: Использовать ли ползунок множителя фильтра D-компоненты. Если отключено, значения необходимо задавать вручную.
| Параметр | Описание |
|---|---|
| D Term Lowpass 1 |
В динамическом режиме фильтрация будет сильнее на низких оборотах мотора (низком газе), а с увеличением газа фильтрация ослабевает и задержка уменьшается. Это помогает контролировать скрежет моторов или неожиданные вылеты при включении моторов, одновременно снижая задержку и эффект пропвоша после взлёта. Переход от низкой к высокой частоте среза происходит раньше при увеличении газа, особенно при высоких значениях экспоненты (expo) для D Term Lowpass. В статическом режиме частота среза фиксирована. Такой режим не рекомендуется для фильтрации D-компоненты. Тип фильтра по умолчанию — PT1, хотя некоторые пользователи используют только один динамический фильтр Biquad без второго PT1. Изменения, приводящие к уменьшению фильтрации D-компоненты, могут вызвать серьёзный перегрев моторов или вылеты при включении. |
| D Term Lowpass 2 |
Этот фильтр всегда работает в статическом режиме с фиксированной частотой среза. Для фильтрации D-компоненты требуется как минимум два фильтра низких частот PT1 или один фильтр второго порядка. Обычно частота среза этого фильтра устанавливается на верхнюю границу диапазона динамического фильтра Lowpass 1. Это обеспечивает управление шумом второго порядка выше этой частоты. Изменения, приводящие к снижению фильтрации D-компоненты, могут вызвать серьёзный перегрев моторов или вылеты при включении. |
D Term Notch Filter
Применяет статический (с постоянной частотой) режекторный (notch) фильтр к данным D-компоненты на заданной центральной частоте. Ширина выреза задаётся частотой среза.
Может быть полезен для изолированных резонансов с постоянной частотой, которые усиливаются компонентой D.
Старайтесь устанавливать частоту среза как можно ближе к центральной частоте. Избегайте установки notch-фильтров ниже 100 Гц, за исключением случаев с низкими оборотами моторов (низким RPM).
Yaw Lowpass Filter
Применяет фильтр PT1 с заданной частотой среза к данным гироскопа по оси рыскания (Yaw).
Заключение
Правильно настроенная система PID и фильтров делает полёт дрона стабильным, управляемым и безопасным. Рекомендуется начинать с базовых настроек, постепенно увеличивая сложность и тестируя каждый параметр отдельно.
Важно: При настройке важно наблюдать за нагревом двигателей, реакцией на команды и наличием вибраций. Используйте телеметрию и видеосъёмку для анализа поведения дрона.
![Настройка фильтров в Betaflight [PID Tuning].[Filter Settings]](https://technobee.ru/media/zoo/images/line100_2228b15049980ecaff5c6355d60b9c23.png "Настройка фильтров в Betaflight [PID Tuning].[Filter Settings]")