 в Betaflight")
Вкладка Failsafe (Аварийный режим) в Betaflight
Режим Failsafe (Failsafe) — это действие, которое выполняет ваш аппарат при потере соединения с передатчиком. На этой вкладке вы можете настроить поведение аппарата в случае возникновения режима Failsafe.
Этапы Failsafe (Failsafe Stages)
Существует два этапа режима Failsafe:
- Этап 1 (Stage 1) — активируется, когда:
- канал управления получает недопустимую длину импульса (invalid pulse length),
- приёмник сообщает о режиме Failsafe,
- отсутствует сигнал от приёмника в течение 150 мс.
- Этап 2 (Stage 2) — активируется, если:
- радиосвязь отсутствует дольше, чем заданная длительность этапа 1, и квадрокоптер (quad) находится в состоянии "armed" (запущен).
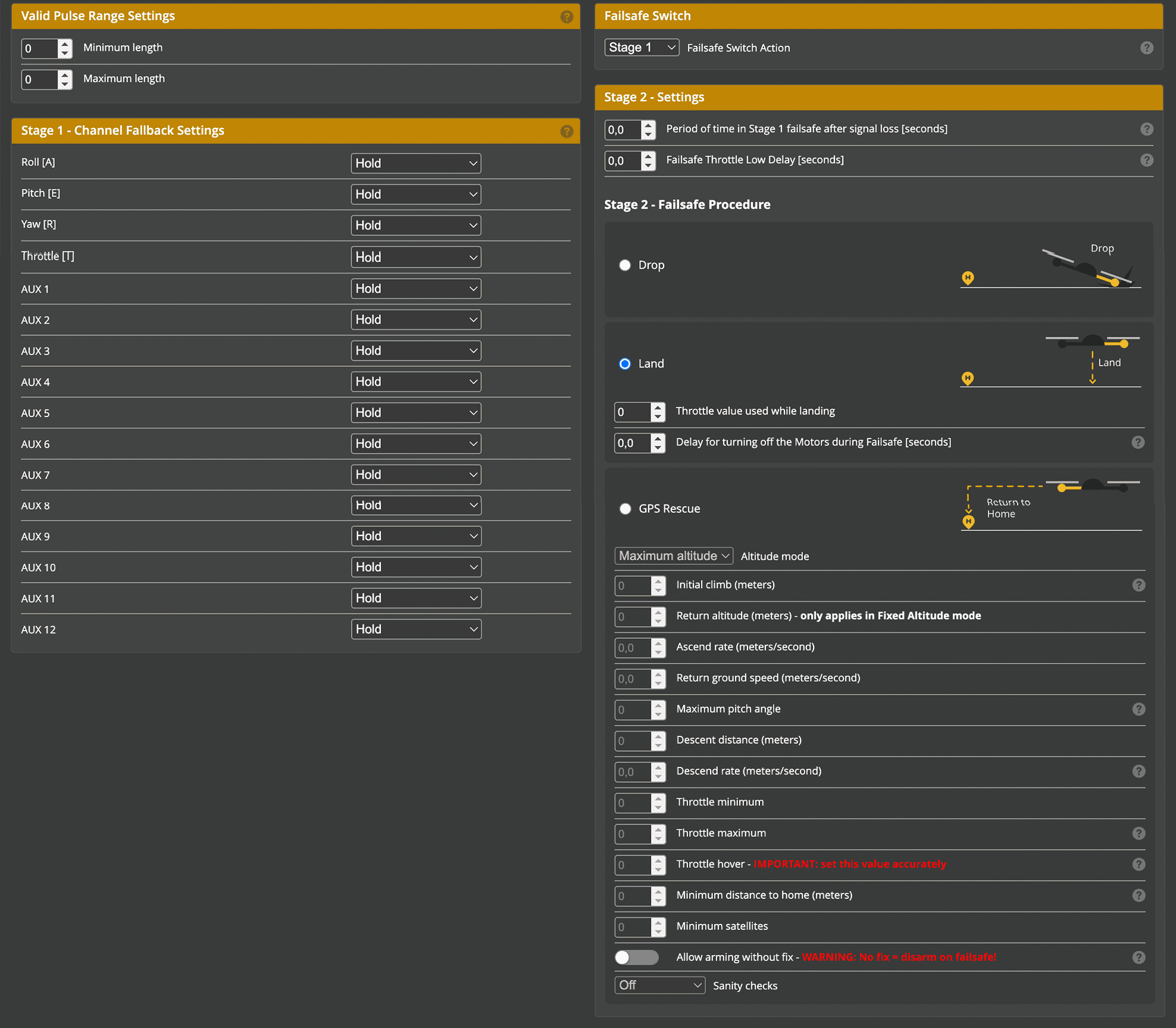
Настройки диапазона допустимых импульсов (Valid Pulse Range Settings)
- Минимальная длина (Minimum length) — минимальная длина допустимого диапазона импульсов. Если значение канала опускается ниже этого порога, контроллер (FC) переходит в режим Failsafe.
- Максимальная длина (Maximum length) — максимальная длина допустимого диапазона импульсов. Если значение канала превышает этот порог, контроллер переходит в режим Failsafe.
Переключатель Failsafe (Failsafe Switch)
Этот параметр определяет, какой этап Failsafe будет активирован при ручном включении режима Failsafe с пульта управления с помощью Failsafe Aux Mode.
- Stage 1 — активирует сначала этап 1, затем этап 2, в обычной последовательности. Полезно для имитации поведения при реальной потере сигнала.
- Stage 2 — пропускает этап 1 и сразу активирует процедуру этапа 2.
- Kill — немедленно отключает моторы (аппарат упадёт).
Этап 1 — Резервные настройки каналов (Stage 1 - Channel Fallback Settings)
Эти настройки применяются к недопустимым AUX-каналам или ко всем каналам при входе в этап 1 (Stage 1).
Вы можете настроить резервное значение для каждого канала индивидуально. Доступные опции:
- Auto — для каналов Roll, Pitch и Yaw устанавливается центральное положение, для Throttle — минимальное значение (квадрокоптер быстро падает). Доступно только для первых 4 каналов.
- Hold — канал сохраняет последнее корректное значение.
- Set — вы можете задать собственное значение канала.
Этап 2 — Процедура Failsafe (Stage 2 - Failsafe Procedure)
Доступны три варианта поведения:
- Drop (по умолчанию) — аппарат отключается и падает.
- Land — аппарат пытается совершить посадку.
- GPS Rescue — аппарат пытается вернуться к точке Home.
Опции Land (режим посадки)
- Throttle value used while landing — значение газа (Throttle), используемое при посадке.
Если в прошивке включён режим Altitude Hold, газ будет автоматически регулироваться для контролируемого снижения.
- Delay for turning off the motors during Failsafe [seconds] — время, в течение которого аппарат остаётся в режиме посадки до отключения моторов.
- квадрокоптер не отключит моторы автоматически, отключение произойдёт только после истечения времени Landing Delay (по умолчанию 60 секунд);
- если значение Failsafe Landing Throttle слишком высокое, аппарат будет набирать высоту вместо посадки;
- если значение слишком низкое, аппарат будет быстро снижаться и может сильно разбиться.
Опции GPS Rescue
| Параметр | Описание |
|---|---|
| Altitude mode |
|
| Initial climb (meters) | Расстояние, на которое аппарат поднимется над текущей высотой при запуске спасательного режима, если выбран режим Current Altitude; также добавляется в режиме Maximum Altitude. |
| Return altitude (meters) | Высота, на которой аппарат будет возвращаться к точке Home при режиме Fixed Altitude. |
| Ascent rate (meter/second) | Скорость подъёма аппарата до необходимой высоты. |
| Return ground speed (meters/second) | Скорость возврата к точке Home. |
| Maximum pitch angle | Максимальный угол тангажа, используемый для возврата. Обычно требуется увеличить газ (Rescue throttle), если угол увеличен. При слишком малом угле аппарат может не справиться с сильным встречным ветром. |
| Descent rate (meters/second) | Скорость снижения при приближении к точке Home. |
| Throttle minimum | Минимальное значение газа, используемое при возврате. |
| Throttle maximum | Максимальное значение газа, используемое при возврате. Убедитесь, что аппарат способен достичь заданной скорости возврата и удерживать высоту при больших углах тангажа и при ожидаемых ветровых нагрузках. |
| Throttle hover | Начальное значение газа при старте спасательного режима. Очень важно настроить его правильно. Если аппарат проседает при запуске, значение, скорее всего, слишком низкое. |
| Minimum distance to home (meters) | Минимальное расстояние от точки Home, необходимое для корректного запуска GPS Rescue. Если режим запускается ближе, чем это расстояние, аппарат сначала улетит в случайном направлении, пока не достигнет заданного расстояния, и только потом начнёт возвращаться. Рекомендуется избегать запуска в пределах этого радиуса. |
| Minimum satellites | Минимальное количество спутников, необходимое для активации GPS Rescue. Если спутников меньше — режим не запустится. |
| Allow arming without fix | Разрешает запуск моторов без GPS-фиксации. Если включено, квадрокоптер можно запустить без определения точки Home. Однако, если GPS Rescue запустится без точки Home — аппарат немедленно отключится и упадёт. По умолчанию выключено (гораздо безопаснее) — если выбран GPS Rescue, запуск возможен только после получения GPS-фиксации и определения Home. |
| Sanity checks |
|
Для получения дополнительной информации о GPS Rescue в версии 4.5+ см. соответствующий документ в Wiki.
Тестирование Failsafe (Testing Failsafe)
Несоблюдение этого правила может привести к потере или повреждению оборудования, а также к травмам.
- Режим Drop проще всего протестировать со снятыми пропеллерами: запустите моторы, затем выключите передатчик. Моторы должны отключиться через заданное время задержки Failsafe.
- При использовании других режимов (Land, GPS Rescue) можно настроить Failsafe на переключатель и активировать его в открытой, безопасной зоне. Если что-то пойдёт не так, вы можете вернуть переключатель в исходное положение и немедленно восстановить контроль.
- Для GPS Rescue существует отдельный режим GPS Rescue, который можно активировать независимо от Failsafe. Он сразу запускает Stage 2 GPS Rescue, минуя Stage 1.
 в Betaflight")