


КАК ВЫБРАТЬ ПОЛЁТНЫЙ КОНТРОЛЛЕР ДЛЯ КВАДРОКОПТЕРА
Как выбрать полётный контроллер для квадрокоптера
Выбрать подходящий полётный контроллер — задача не из лёгких. На рынке представлено множество вариантов, каждый из которых хорош по-своему. С развитием технологий полётные контроллеры значительно эволюционировали: используются более быстрые и мощные микроконтроллеры, что позволяет оптимизировать ресурсы и расширять функционал.
Технологии продвинулись далеко вперёд по сравнению с популярными ранее платами KK2. Ранние платы KK2 и их последователи были громоздкими (50x50 мм), тогда как современные контроллеры F7 вдвое меньше по размеру и обладают большей вычислительной мощностью.
Хотя при выборе полётного контроллера нужно учитывать множество параметров, этот гид поможет вам подобрать лучший вариант под ваши задачи и упростит процесс покупки.
Что такое полётный контроллер?
Полётные контроллеры (сокращённо FC) — это платы с определёнными датчиками, такими как гироскопы (определяют угловое положение) и акселерометры (измеряют вибрации моторов), а также рядом других полезных сенсоров: барометр (определяет высоту), компас (ориентация относительно магнитного поля Земли) и др.
Однако функции полётного контроллера этим не ограничиваются. Одна из основных задач — приём и обработка сигналов от приёмника и выполнение команд пользователя. Проще говоря, полётный контроллер можно сравнить с человеческим мозгом: он управляет полётом квадрокоптера, как мозг управляет движением человека.
Процессоры полётных контроллеров
Наиболее распространённые процессоры для мини-квадрокоптеров — F1, F3, F4 и F7. F3 сменил F1, F4 — F3, а F7 — F4. Все они основаны на архитектуре STM32 с 32-битной обработкой (в отличие от 8-битных плат KK2.x).
| Процессор | Тактовая частота (МГц) |
|---|---|
| F1 | 72 |
| F3 | 72 |
| F4 | 168 |
| F7 | 216 |
С развитием процессоров увеличивалась и их производительность. Чем выше тактовая частота, тем быстрее выполняются команды. Самый быстрый — F7 — способен обрабатывать 216 миллионов циклов в секунду.
F1
Самый старый и наименее производительный из перечисленных процессоров. Устарел, поддержка Betaflight для F1 закончилась в 2017 году.
F3
Улучшенная версия F1 с большим количеством UART-портов и увеличенной флэш-памятью. Некоторые компактные платы до сих пор используют этот процессор.
F4
Существенный скачок по мощности по сравнению с F3. Однако не поддерживает SmartAudio "из коробки", что для большинства не критично. F4 — самый популярный выбор благодаря функциональности и цене.
F7
Самый современный и мощный процессор для мини-квадрокоптеров. Оснащён до 8 UART-портами, поддерживает телеметрию, GPS, управление камерой и др. Может иметь два гироскопа (MPU6000 и ICM20602).
Лучшие полётные контроллеры
Diatone Mamba MK4 F722

Лучшее соотношение цена/качество
-
480 МГц STM32H743 MCU
-
Два гироскопа
-
128 МБ памяти для BlackBox
-
8 UART-портов
-
Входное напряжение 3–6S
-
Поддержка телеметрии ESC, разъёмы для пищалки, BEC 3.3В 0.5А, 5В 3А, 9В 3А
-
Возможность управления светодиодами через UART
Matek F405 STD
Лучший бюджетный вариант
-
Компактный размер (20x20 мм)
-
1 МБ флэш-памяти, поддержка ArduPilot и INAV
-
6 UART-портов, 1 Softserial_Tx
-
Встроенный OSD, слот для MicroSD, барометр
-
Поддержка DJI Air Unit PnP, BEC 10В для DJI OSD/аналогового VTX
Holybro Kakute H7

Топовый вариант
-
Встроенный Bluetooth
-
Два разъёма для 4-в-1 ESC
-
Поддержка HD-камер
-
Барометр, OSD, 6 UART-портов
-
Слот MicroSD для BlackBox
-
BEC 5В и 9В
-
Поддержка DJI HD, светодиоды, пищалка, I2C для GPS/магнитометра
Flywoo GOKU GN F745
Лучший для ультра-лёгких сборок (Toothpick)
-
Размер 25.5×25.5 мм, AIO
-
ESC на 40А, поддержка 2–6S
-
8 МБ памяти для BlackBox
-
BEC 9В 1.5А, 5В 2А, 3.3В 0.5А
-
Барометр, поддержка WS2812LED, 7 аппаратных UART, I2C
-
Поддержка протоколов SBUS, iBus, Spektrum, Crossfire
Прошивки
-
Betaflight — самая популярная, с удобным интерфейсом, постоянно развивается, поддерживает множество контроллеров.

-
Raceflight — ориентирована на акро и гоночные дроны, убраны ненужные функции для максимальной производительности.

-
KISS — закрытая прошивка от FlyDuino, работает только на фирменных платах, аналог "Apple" в мире квадрокоптеров.

Аппаратная часть
IMU: гироскоп и акселерометр
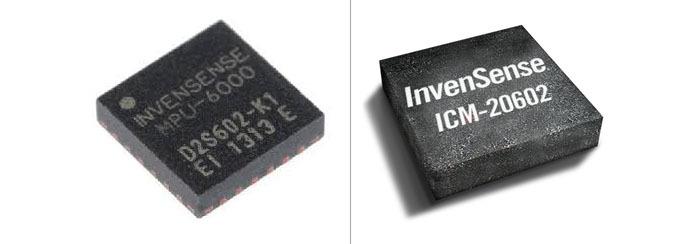
IMU (инерциальный измерительный блок) содержит гироскопы и акселерометры. Гироскоп определяет угловое положение, акселерометр — вибрации. Основные гироскопы: MPU6000 (наиболее устойчив к шуму, до 8 кГц) и ICM20602 (более чувствителен, до 32 кГц).
Чувствительность ICM20602 может быть как хорошей, так и плохой стороной. Технически, гироскопы серии ICM должны показывать лучшие результаты из-за своей чувствительности, но это не всегда так. Механические вибрации от двигателей требуют мягкого крепления гироскопа в полетном контроллере, а электрические шумы от двигателей и регуляторов скорости (ESC) требуют добавления конденсаторов для борьбы с электрическими помехами. Но при правильной настройке ICM20602 может превзойти ICM6000 во всех отношениях.
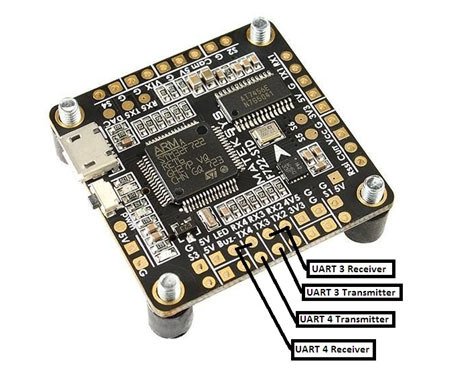
UART-порты
UART (универсальный асинхронный приёмопередатчик) — аппаратный интерфейс для подключения периферии (OSD, VTX, приёмник и др.).
До 2014 года полетные контроллеры (FC) могли иметь до 20 UART-портов, что избавляло пользователей от беспокойства по поводу нехватки этих портов. Стремясь к миниатюризации FC, производители пошли на компромисс, уменьшив количество UART-портов, причем максимум 8 портов сейчас можно встретить на современных F7 FC. ((20250618211324-3hii8aa “*”))
Если вы планируете использовать телеметрию, Smart-port или даже GPS для дальних полетов, а также множество других периферийных устройств, требующих UART-портов, вы столкнетесь с проблемой их нехватки. Вам придется расставлять приоритеты и выбирать устройства, которые вы будете использовать.
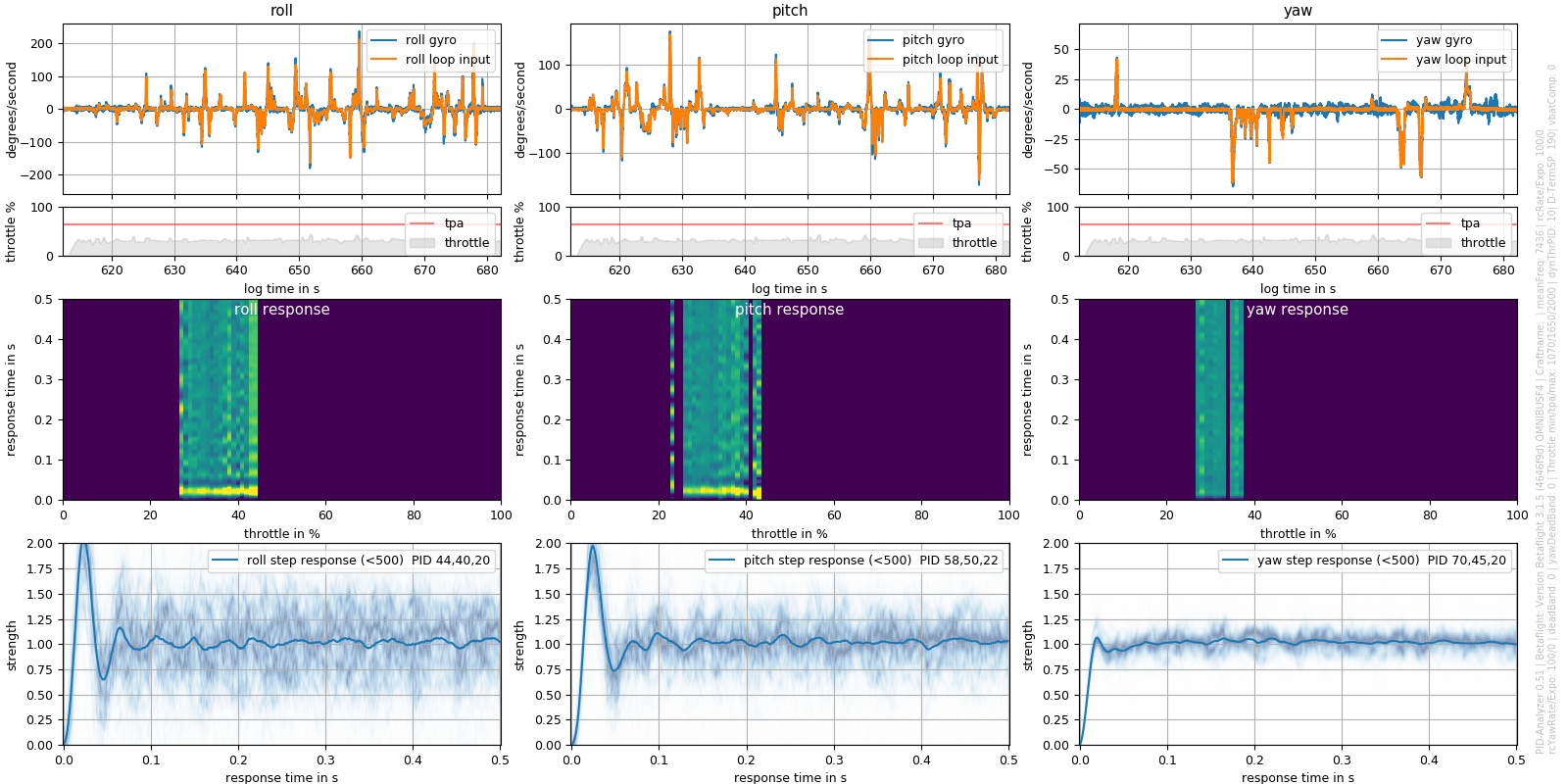
PID, настройка PID и анализаторы PID
PID — пропорциональный, интегральный и дифференциальный коэффициенты, отвечающие за корректировку ошибок от датчиков. Настройка PID — отдельная сложная тема, требующая отдельного руководства. Вкратце: "P" отвечает за ориентацию, "I" — за компенсацию внешних воздействий, "D" — за подавление колебаний.
ДОПОЛНИТЕЛЬНЫЕ ДАТЧИКИ
Интеграция GPS
Многие современные полётные контроллеры поддерживают подключение GPS-модуля. GPS позволяет реализовать такие функции, как удержание позиции, возврат домой (Return to Home, RTH), автоматическое приземление и другие режимы автономного полёта. Для работы GPS необходим свободный UART-порт и поддержка соответствующей прошивки (например, Betaflight, INAV, ArduPilot).
Датчики тока
Датчик тока (Current Sensor) позволяет отслеживать потребление энергии квадрокоптером в реальном времени. Это важно для контроля оставшегося заряда аккумулятора и предотвращения его переразряда. Данные о токе могут выводиться на OSD или передаваться по телеметрии на пульт управления.
Барометр
Барометр — датчик давления, используемый для определения высоты полёта. Особенно полезен при полётах в режиме удержания высоты (Altitude Hold) и для точного управления дроном на больших высотах. Некоторые полётные контроллеры имеют встроенный барометр, другие позволяют подключить внешний.
ДОПОЛНИТЕЛЬНЫЕ ВОЗМОЖНОСТИ
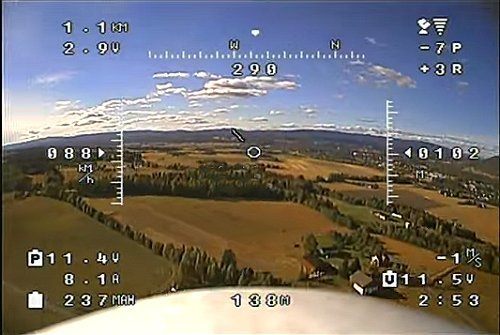
Экранный дисплей (OSD)
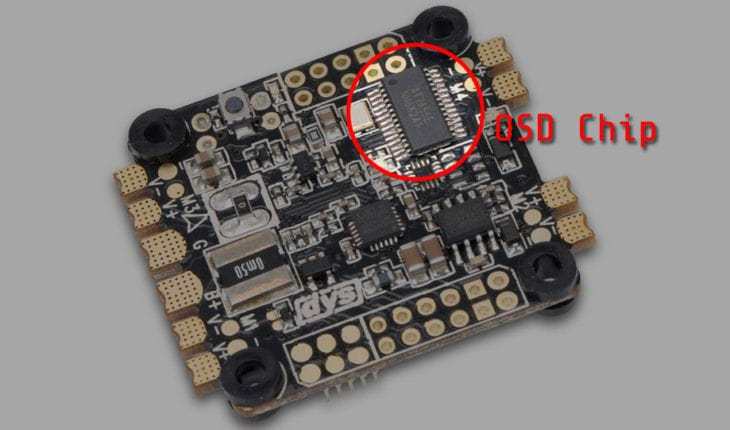
On Screen Display (OSD) — это система, которая накладывает важную информацию (напряжение батареи, ток, высоту, координаты GPS, режимы полёта и др.) прямо на видеосигнал с камеры квадрокоптера. Современные полётные контроллеры часто имеют встроенное OSD, что избавляет от необходимости использовать отдельные платы.
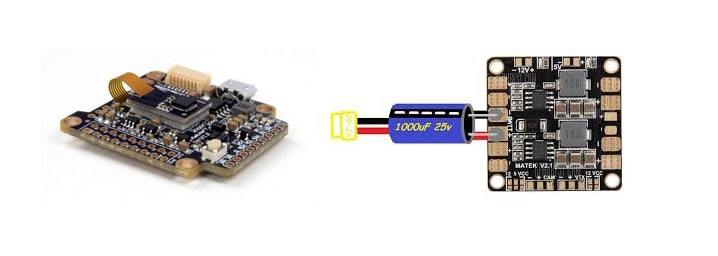
Плата распределения питания (PDB)
Power Distribution Board (PDB) — это плата, предназначенная для равномерного распределения питания между всеми компонентами квадрокоптера (ESC, полётный контроллер, видеопередатчик, светодиоды и др.). В современных сборках PDB часто интегрируется в полётный контроллер или ESC.

Преобразователи напряжения (BEC)
Battery Elimination Circuit (BEC) — это схема, преобразующая напряжение аккумулятора в стабильное напряжение, необходимое для питания электроники (обычно 5В или 9В). Многие современные FC имеют встроенные BEC, что упрощает сборку и делает её более компактной.
Black Box
Black Box — это функция записи данных полёта (журналирования), которая позволяет анализировать работу квадрокоптера, выявлять ошибки и оптимизировать настройки PID. Данные Black Box записываются во встроенную память или на карту microSD.
Интеграция ESC

В некоторых полётных контроллерах предусмотрена интеграция с электронными регуляторами скорости (ESC), что позволяет упростить подключение и повысить надёжность системы. Такие решения часто используются в компактных и ультра-лёгких квадрокоптерах.
Совместимость с приёмниками
Современные FC поддерживают широкий спектр радиоприёмников: SBUS, iBus, Spektrum, Crossfire и другие. При выборе контроллера важно учитывать тип используемого радиоуправления.
Мягкое крепление FC и гироскопа

Soft mounting — это способ установки полётного контроллера и/или гироскопа на специальные демпферы или прокладки для снижения вибраций от моторов. Это особенно важно для высокочувствительных гироскопов (например, ICM20602).
Схемы крепления
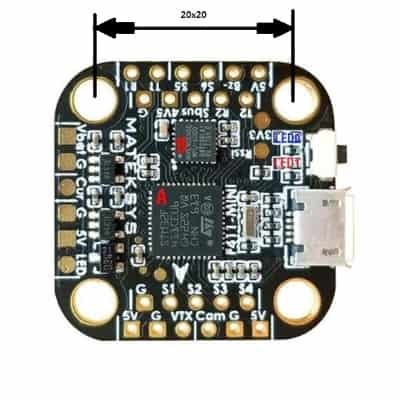
Полётные контроллеры различаются по размерам и схемам крепления: 30.5x30.5 мм (стандарт), 20x20 мм (мини), 25.5x25.5 мм (AIO для Toothpick и ультра-лёгких сборок). При выборе FC важно убедиться, что его размеры и отверстия для крепления соответствуют вашему фрейму.
ВЫВОДЫ
Выбор полётного контроллера зависит от ваших задач, бюджета и уровня подготовки. Для начинающих подойдут бюджетные и надёжные решения на базе F4, для продвинутых пользователей и профессионалов — современные платы на F7 с расширенным функционалом. Важно учитывать совместимость с периферией, количество UART-портов, наличие необходимых датчиков и поддерживаемую прошивку.
- Четверг, 31 июля 2025