


13. Конфигурирование в BetaFlight.
Настройка Betaflight
Betaflight стал популярным среди пользователей дронов по нескольким причинам. Он имеет открытый исходный код, к развитию программы может присоединиться любой: вносить изменения, исправлять ошибки и добавлять новые функции.
Эта совместная среда способствует быстрому развитию и инновациям. Betaflight позволяет пользователям настраивать практически все аспекты работы дрона, что позволяет адаптировать его под индивидуальные потребности и стили полета. Большое количество пользователей и разработчиков Betaflight позволяет быстро найти помощь, советы, готовые настройки и инструкции. Это также способствует обмену знаниями и опытом. Betaflight поддерживает большое количество различных контроллеров и моделей дронов, что делает его универсальным инструментом для различных применений. Благодаря регулярным обновлениям и оптимизациям Betaflight обеспечивает высокую производительность и стабильность во время полетов, что особенно важно для гоночных дронов и дронов для фристайла. Инструмент для настройки Betaflight имеет удобный и интуитивно понятный графический интерфейс, что делает процесс настройки более простым даже для новичков. Благодаря гибким настройкам PID и других параметров пилоты могут достигать максимальной точности и контроля над своими дронами. Эти факторы делают Betaflight привлекательным выбором как для опытных пилотов, так и для новичков, которые хотят вывести свой опыт управления дронами на новый уровень.
Существуют и другие прошивки для настройки дронов, но в большинстве случаев пилоты используют именно Betaflight. Например, для крылатых планеров (самолётов) и дронов, выполняющих миссии и использующих множество навигационных систем, лучше подходят такие прошивки, как ArduPilot или iNav. Они имеют схожую логику настройки с Betaflight, но отличаются меню, инструментами и возможностями.
Это бесплатная программа, которую можно скачать с официального сайта Betaflight.com в разделе «Загрузки». Здесь можно использовать программу онлайн или установить на своё устройство последнюю версию с ресурса GitHub.com.
Рекомендуется использовать последнюю версию Betaflight из-за новых функций и возможностей, но не ниже версии 10.10.
После скачивания программы или её открытия в веб-браузере необходимо запустить приложение. Затем нужно подключить кабель от полётного контроллера к устройству, на котором запущена программа Betaflight.
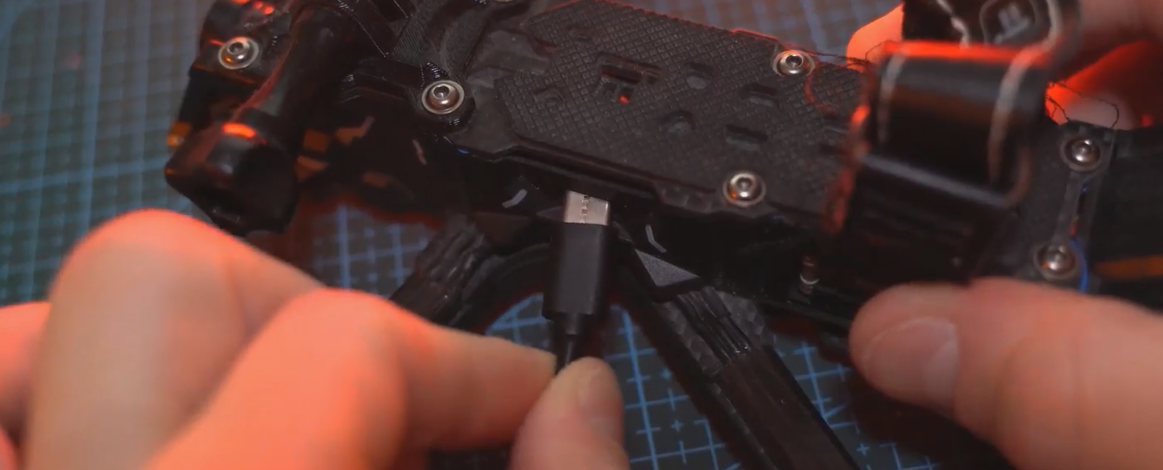
Если все работает верно, то автоматически отобразится полетный контроллер в устройствах с надписью COM Betaflight.
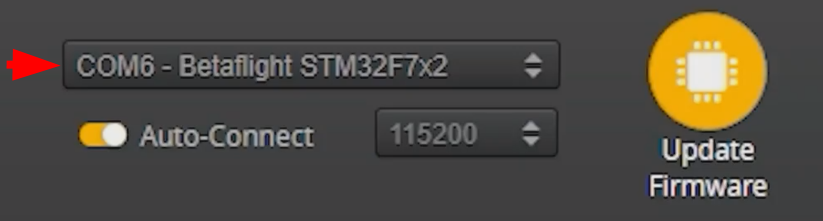
Если устройство не видит Flight Controller, существует целая инструкция, как это сделать, на главной странице программы в меню приветствия.
Часто решить проблему с соединением помогает программа ImpulseRC Driver Fixer [ссылка], которая после открытия сама ищет проблему и исправляет ее.
Если все хорошо работает, то переходим к самой программе.
![]()
1: Первые шаги и создание резервной копии (CLI)
Первое, что рекомендуется сделать перед началом внесения изменений в настройки полётного контроллера, — сохранить резервную копию его настроек на всякий случай. Иногда бывают ситуации, когда после неудачных экспериментов необходимо восстановить заводские настройки.
Для этого нужно перейти в нижний раздел программы, который называется CLI — Command Line Interface (интерфейс командной строки).
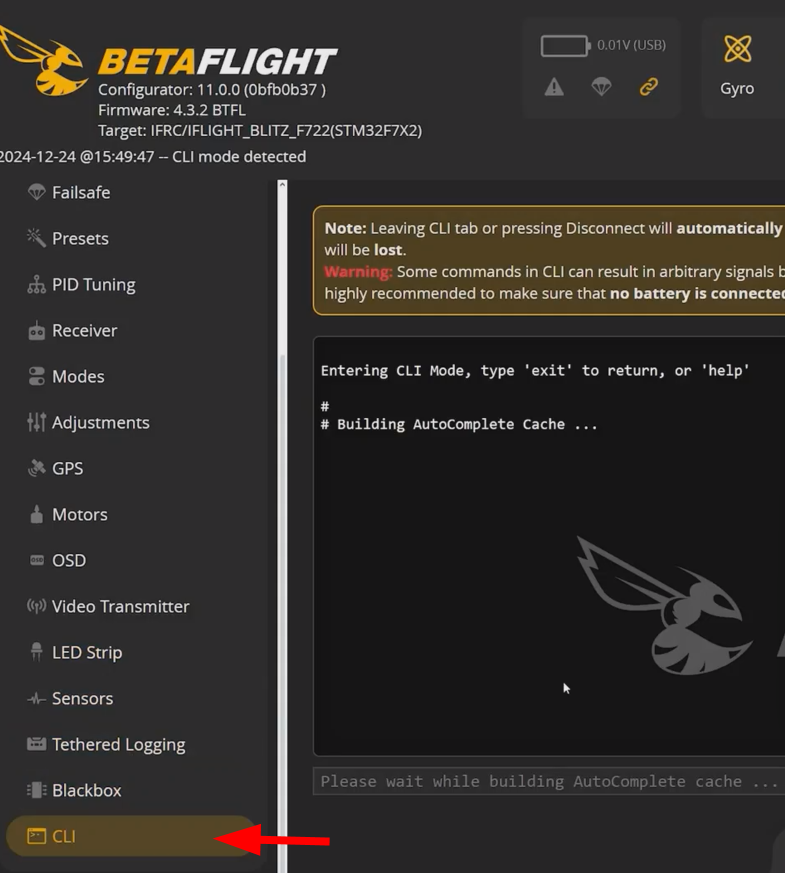
Он используется для вывода всех настроек вашего дрона. Это очень полезно для создания резервной копии настроек, копирования их на другой дрон или для восстановления. Так делают профессиональные пилоты.
- Вводим в строку команду
dump all. Она полностью считывает программный код Flight Controller. - Нажимаем клавишу Enter на клавиатуре.
- Нажимаем в программе кнопку
Save to File. - Сохраняем резервный код на своем устройстве в удобном для вас месте.
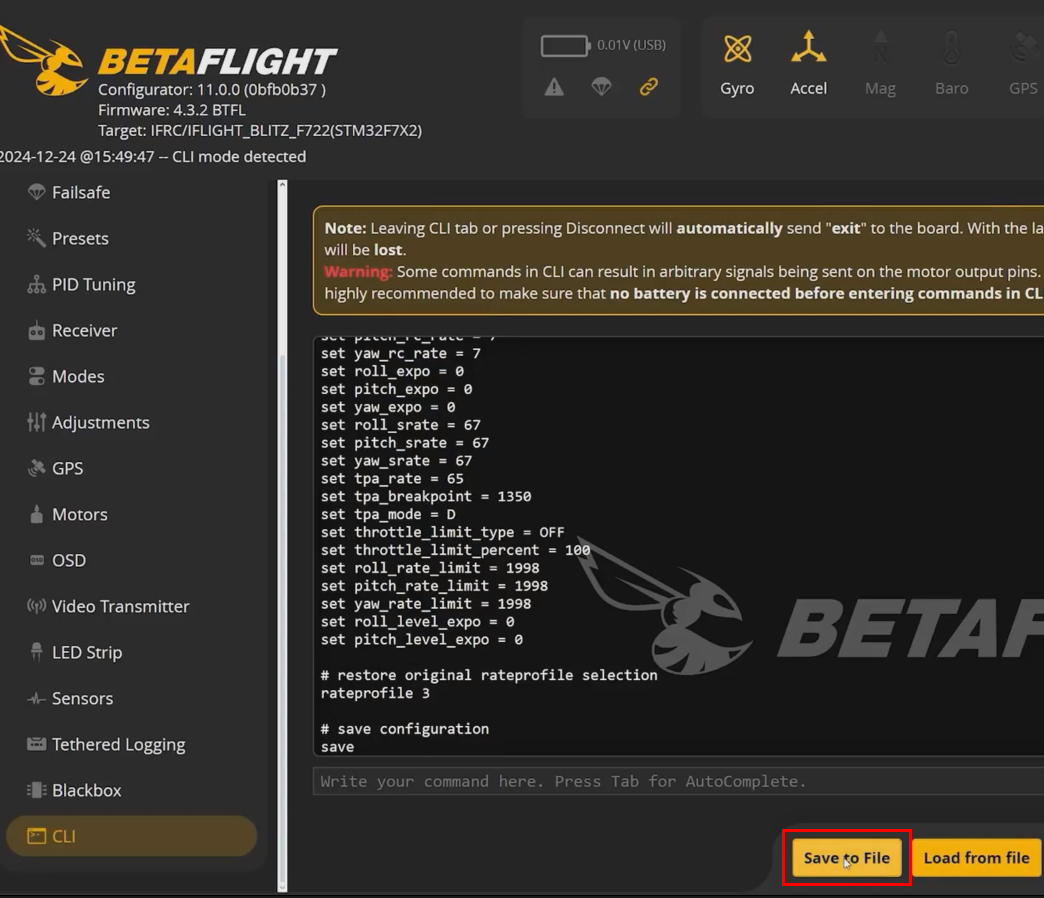
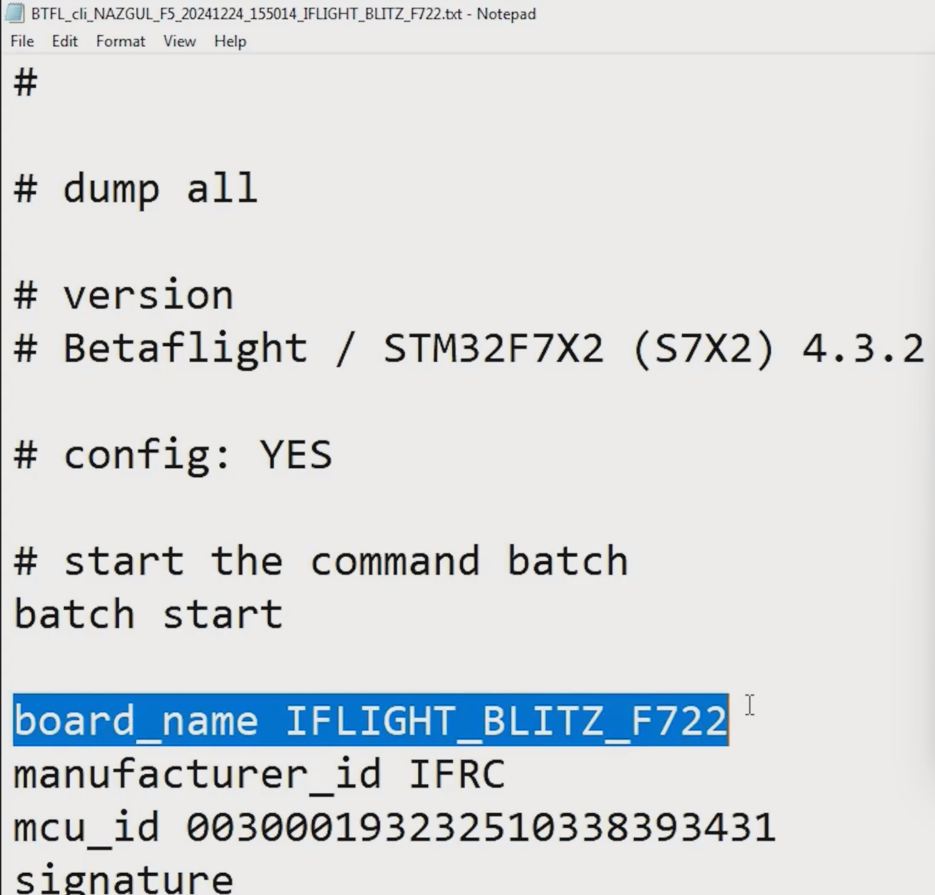
Теперь у нас есть резервная копия настроек полетного контроллера. Она выглядит как обычный текстовый файл, в котором находится перечень настроек вашего полетного контроллера. Если его открыть, то можно увидеть версию прошивки полетного контроллера.
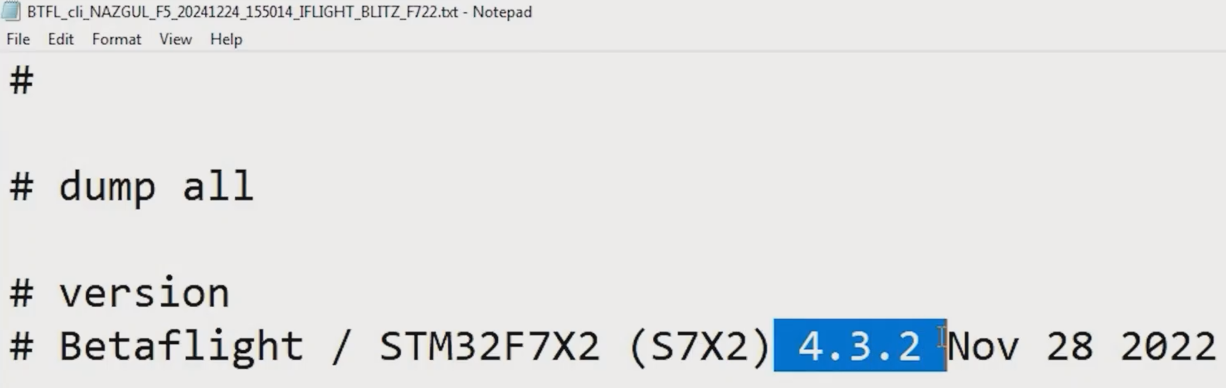
Название файла содержит название дрона, время, день и год создания бэкапа настроек контроллера.
![]()
Если планируется множество экспериментов с настройками полётного контроллера и уже создана резервная копия с помощью команды dump, рекомендуется создать отдельную папку для каждого дрона, чтобы не перепутать файлы между собой. Для удобства управления параметрами и поиска неисправностей можно использовать другую команду в CLI — diff. Она показывает только те настройки, которые отличаются от стандартных значений, что значительно упрощает работу.
Также рекомендуется делать бэкап после каждого сомнительного изменения настроек, чтобы впоследствии не приходилось вспоминать, какие изменения вызвали неправильную работу дрона.
Если нужно восстановить предыдущие настройки, в том же разделе следует нажать кнопку «Load From File» и выбрать нужный файл с настройками.
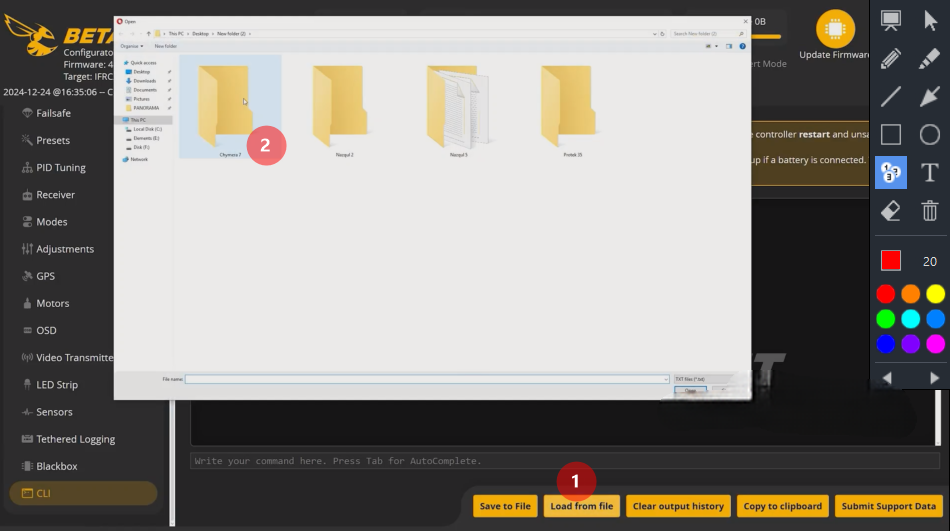
Далее нужно нажать кнопку «Execute», чтобы началась загрузка предыдущих настроек в полётный контроллер. Этот процесс занимает некоторое время. После успешной загрузки полётный контроллер перезагружается.
С помощью бэкап-файла можно клонировать настройки прошивки с одного дрона, идентичного по сборке, на другой, сохранив удачные параметры всего одним разом. Это значительно экономит время.
![]()
2: Обновление прошивки (Firmware Flasher)
Теперь рассмотрим процесс перепрошивки полётного контроллера до новых версий прошивки или отката на предыдущие версии. Новые версии прошивки обычно содержат оптимизации, которые позволяют дрону работать эффективнее и стабильнее. Каждое обновление может добавлять новые функции и возможности, например, новые режимы полёта, улучшенные алгоритмы стабилизации, расширенные настройки и многое другое.
Также обновления часто включают исправления известных ошибок и проблем, что улучшает общую работу дрона и снижает вероятность возникновения неисправностей во время полёта.
- Нужно перевести Flight Controller в режим DFU (Device Firmware Update) в Betaflight. Это можно сделать несколькими способами.
- Первый способ – нажать кнопку
Update Firmware.
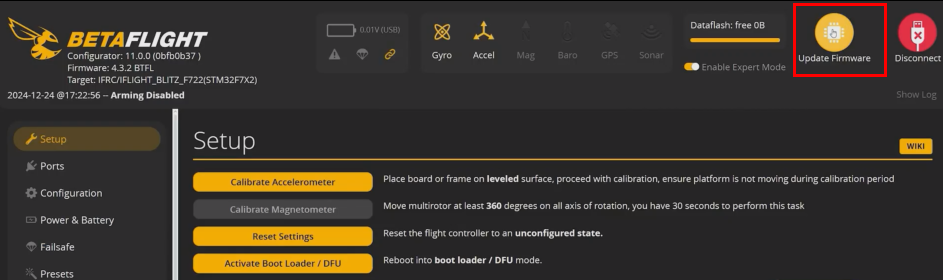
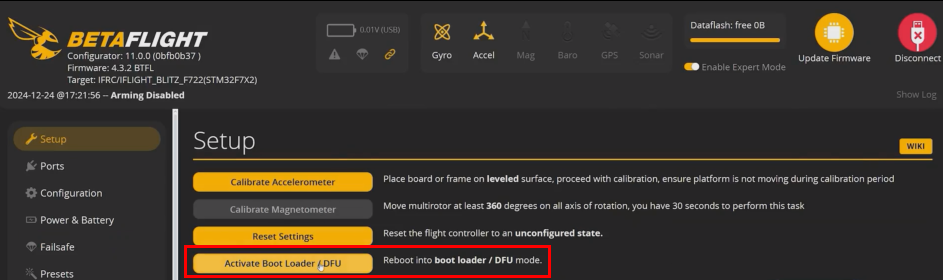
- Второй способ – в меню
Setupнажать на кнопкуActivate Bootloaderи затем перейти во вкладкуFirmware Flasher.
- Прежде чем начинать прошивать полетный контроллер, нужно создать резервную копию прошивки. Мы это сделали ранее через команду
dump all - В ней (в сохранненном файле) нам нужно посмотреть название полетного контроллера, чтобы ввести его вручную или найти через авто-поиск.
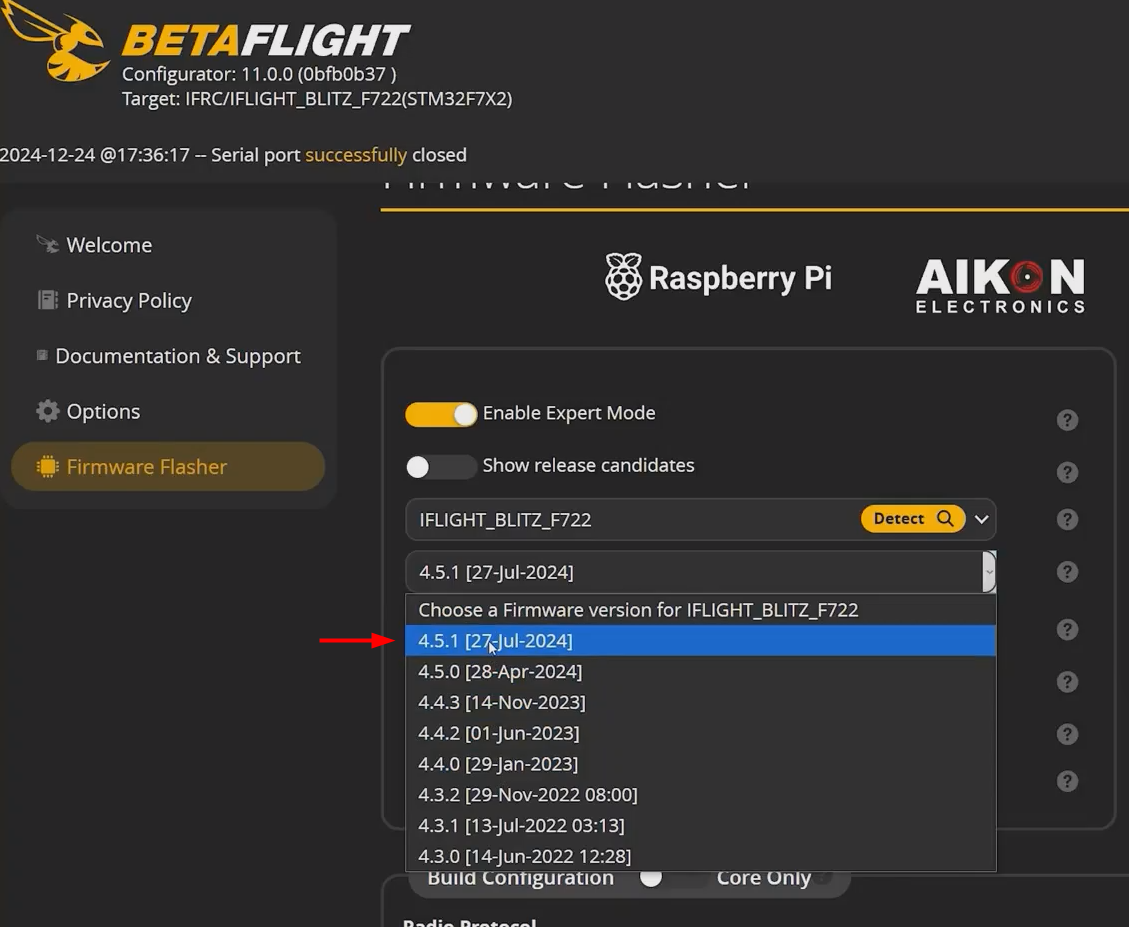
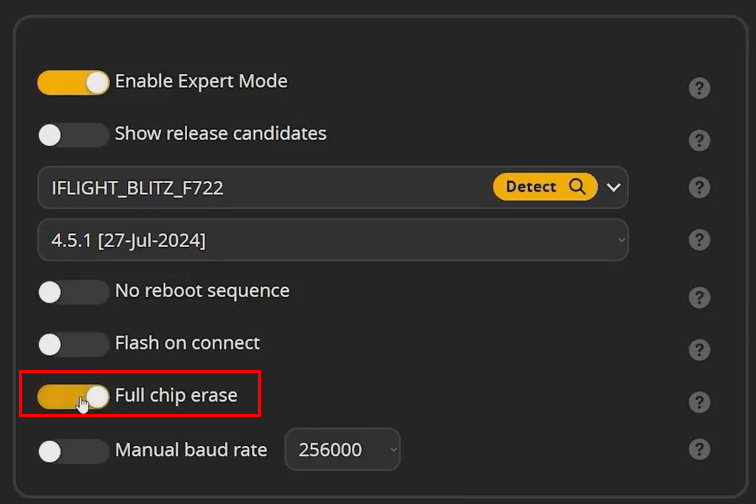
- Активируем
Enable Expert Mode.
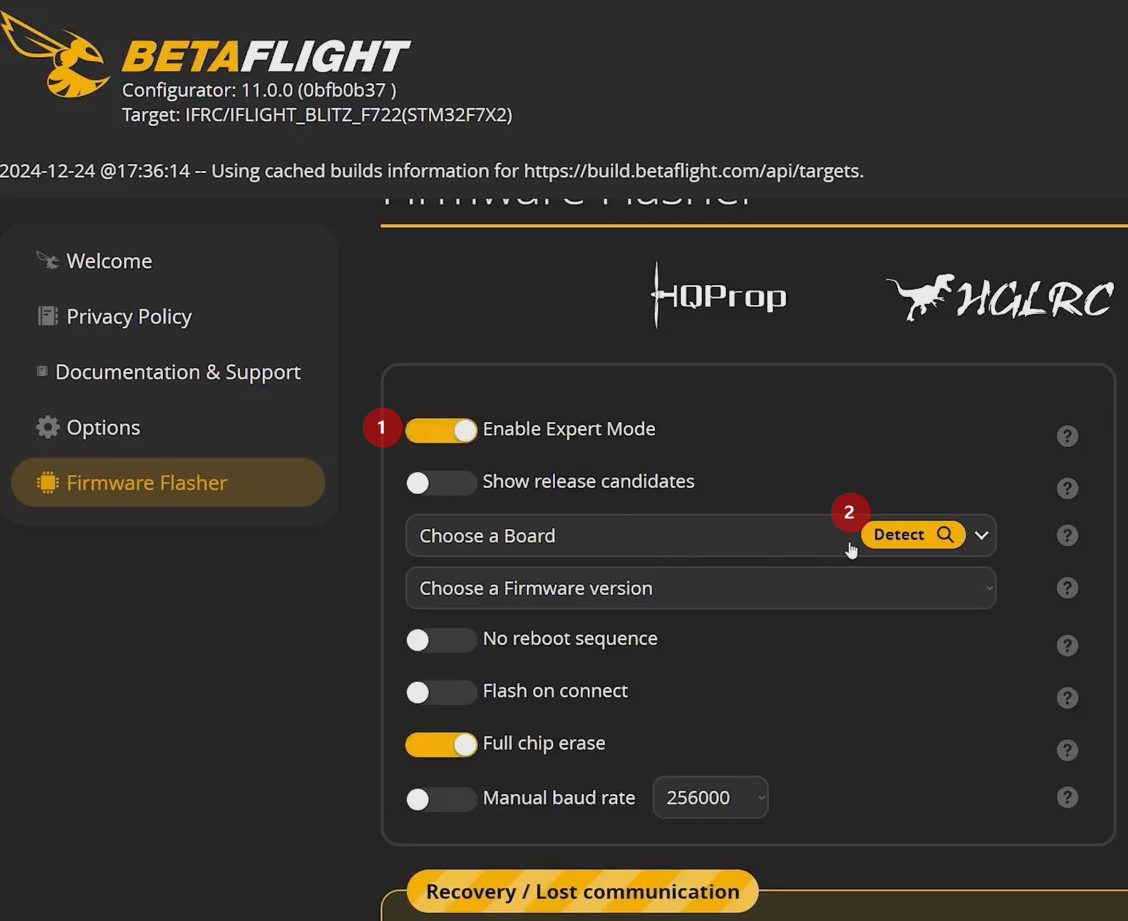
- Нажимаем кнопку
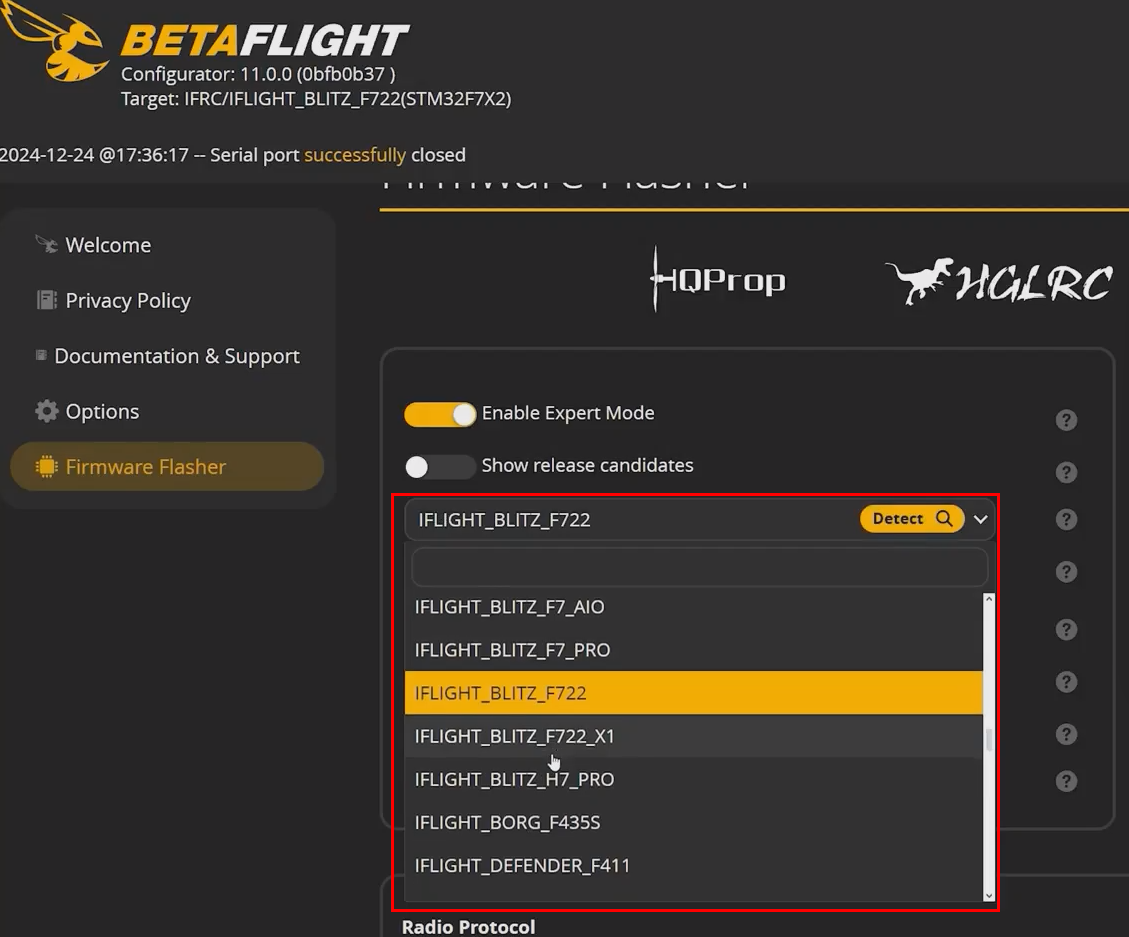
Detect. Контроллер должен определиться автоматически. - Если не определился - ищем его в выпадающем списке (Choose a Board), ориентируясь по названию из
dumpилиdiff.
- Далее выбираем версию прошивки.
- Активируем
Full cheap erase, чтобы полностью переписать прошивку.
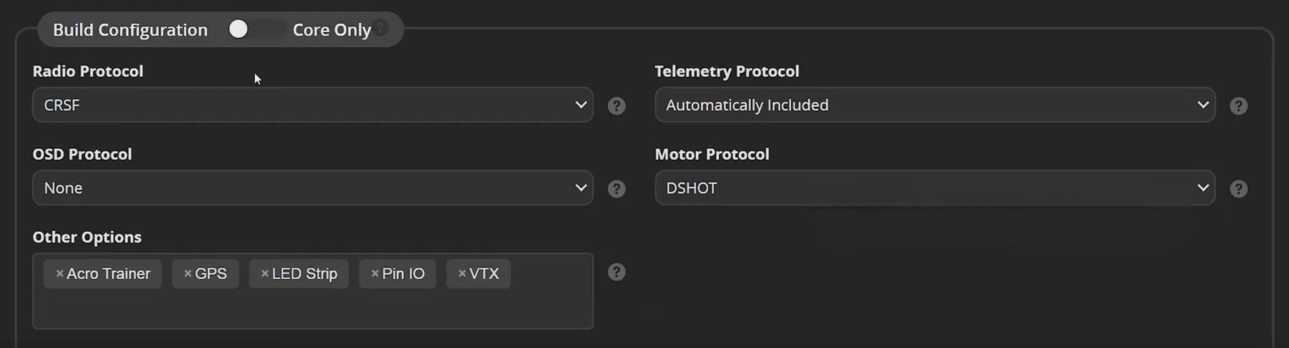
- Ниже можно выбрать параметр
BUILD CONFIGURATION, который позволяет вручную добавить к прошивке необходимые параметры с настройками по категориям.
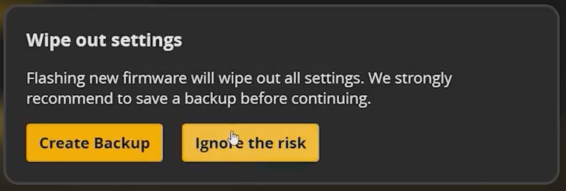
- Нажимаем кнопку
LOAD FIRMWARE [ONLINE]. - После этого нажимаем на кнопку
Flash Firmware. - Выбираем
Ignore the risk.
У многих пользователей после нажатия этой кнопки конфигуратор выдает ошибку, потому что полетный контроллер переходит в режим DFU, а операционная система при этом не имеет необходимых драйверов. Для решения этой проблемы нужно использовать рекомендованные программы типа Zadig или ImpulseRC Driver Fixer.
Если полетный контроллер начал прошиваться, это означает, что у вас все уже установлено.

SUCCESSFUL - Всё, он прошился. Теперь приступаем к его настройке.
![]()
Настройка Betaflight (ч.2)
3: Основные настройки (Setup tab)
Произведем калибровку акселерометра, положив дрон на ровную поверхность и нажав кнопку Calibrate Accelerometer.
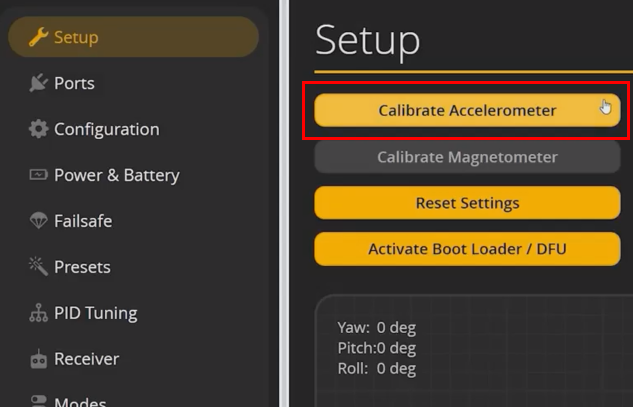
Калибровка помогает точно определить положение дрона в пространстве, что улучшает реакцию на команды и повышает точность управления.
Калибровка акселерометра в Betaflight не требует частого повторения. Обычно её проводят после первой установки контроллера на раму дрона, при замене компонентов, значительных модификациях или после серьёзных падений.
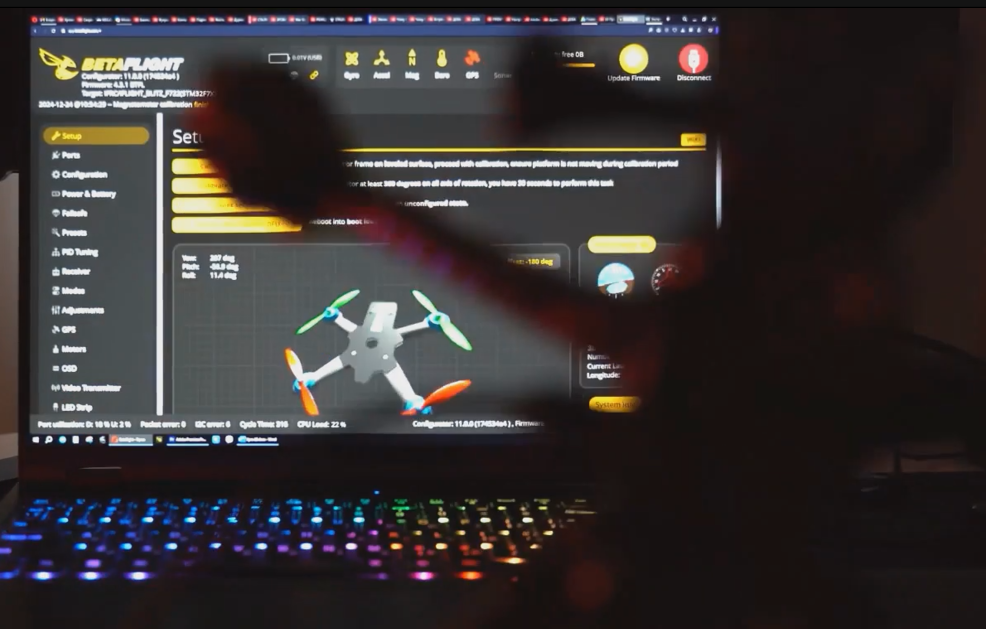
Если дрон оснащён компасом (магнитометром), его обязательно нужно откалибровать.
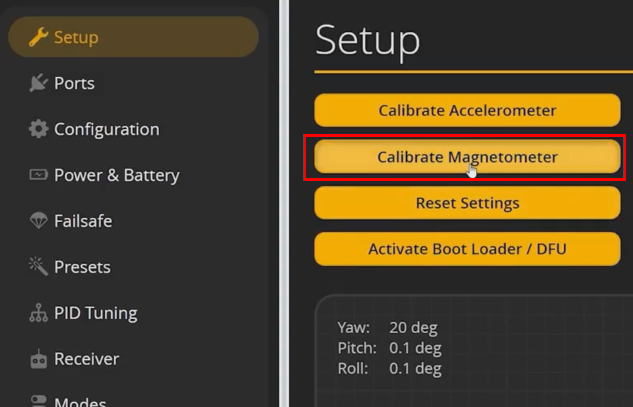
Это не очень удобно, особенно если калибровка происходит через кабель, подключённый к полётному контроллеру, но для точной работы компаса её обязательно нужно выполнить. В течение примерно 30 секунд нужно сделать полные обороты по осям Pitch, Roll и Yaw. Калибровка проводится один раз после установки компаса на раму дрона или через определённое время, например, каждые полгода. Если компас переместить на другое место на раме, его нужно откалибровать снова.
Кнопку «» нажимать не рекомендуется: она якобы сбрасывает настройки полётного контроллера до заводских, но бывали случаи, когда после её использования контроллер полностью блокировался («кирпич»). Это не страшно, поскольку мы уже умеем делать резервное копирование с помощью команды dump all. И копия прошивки у нас уже есть.
В верхней части программы отображается уровень заряда батареи дрона, если он к нему подключён.
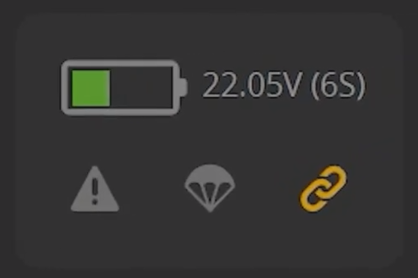
Иконки показывают устройства, которые использует дрон: гироскоп, акселерометр, магнитометр и барометр (реально подключенные к дрону должны отображаться желтым).

!Если у нас есть GPS, то он также должен светиться желтым. Но для его работы нужно подключить к дрону аккумулятор. Без этого он работать не будет.
Sonar используется вместо барометра BARO для получения данных о высоте полета дрона.
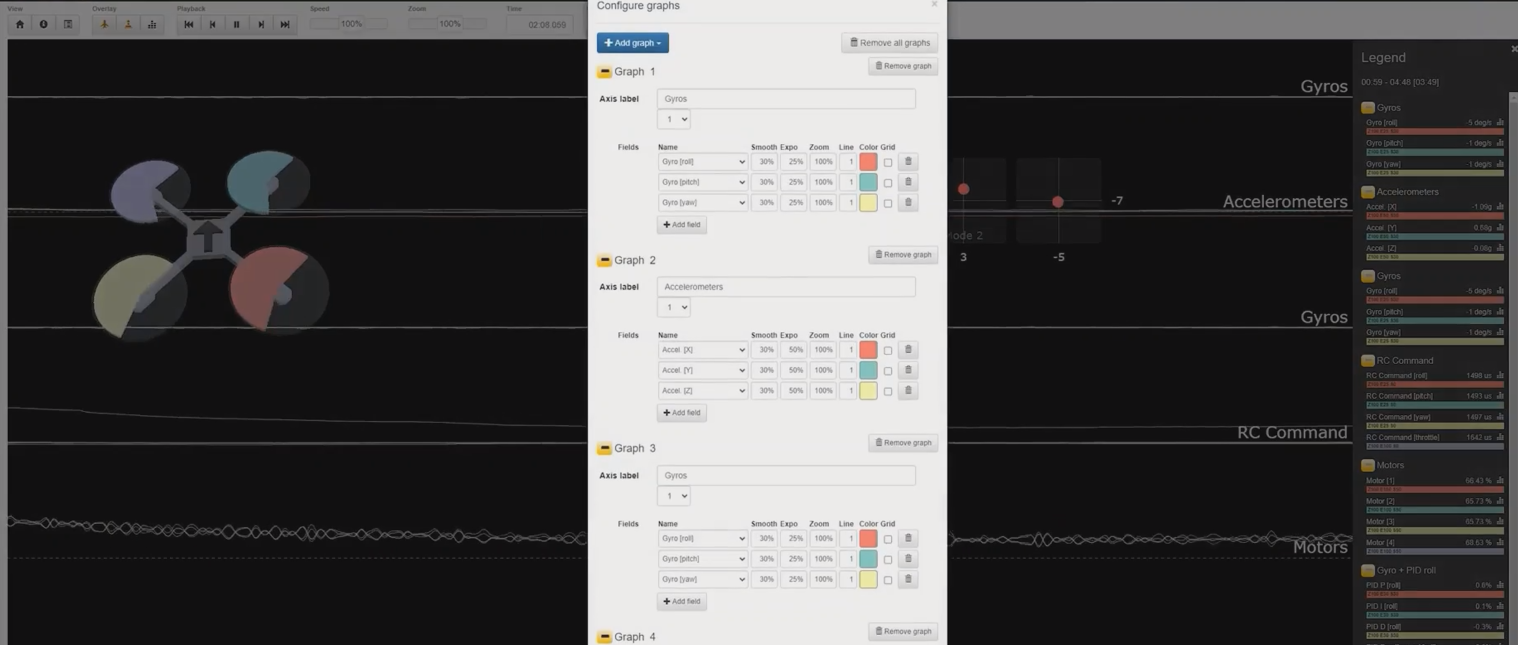
DataFlash ⇓ означает, сколько есть свободного места в черном ящике (BLACK BOX) дрона для записи параметров во время полета.
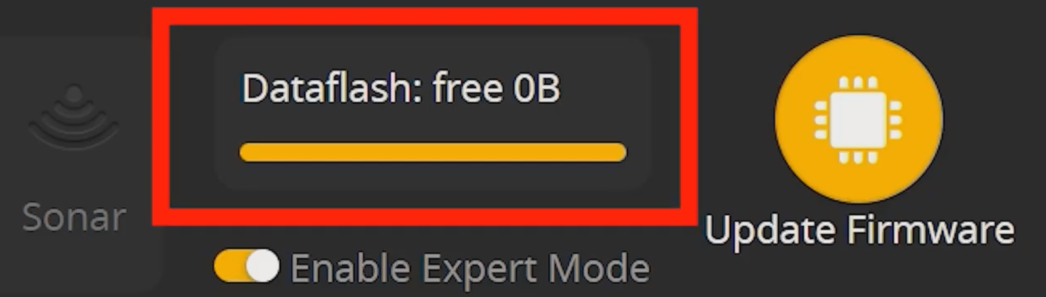
Он имеет ограниченный объем, и поэтому желательно его постоянно очищать. Сам черный ящик полезен для анализа полета дрона и во время его первых настроек.
Файлы Черного Ящика можно открыть с помощью программы Betaflight Blackbox Explorer.
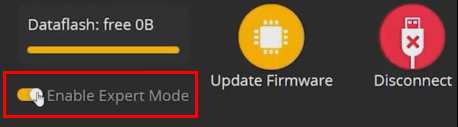
Обязательно ставим галочку на Enable Expert Mode. Это позволяет отображать в конфигураторе больше функций для настройки дрона.
Сверху слева ⇓ отображается версия Betaflight Configurator и версия прошивки вашего Полетного контроллера. Ниже написано название Полетного Контроллера.
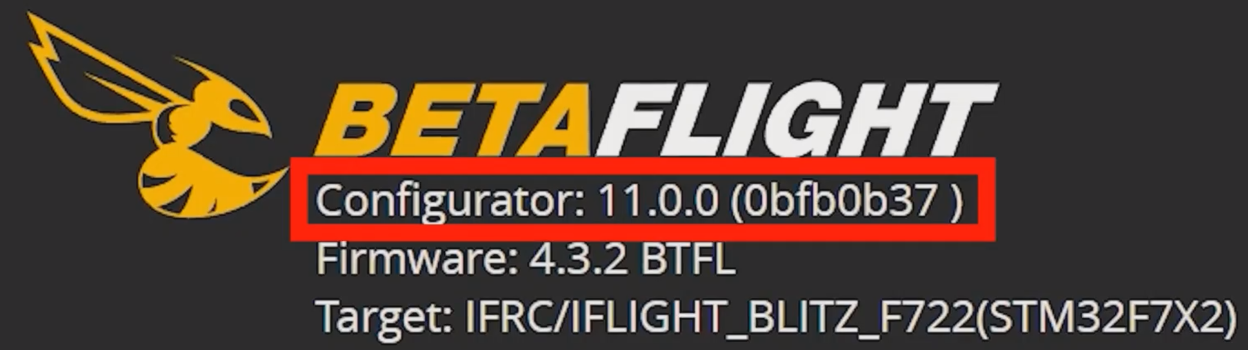
Эта же информация продублирована снизу справа экрана программы.

Для проверки гироскопа и встроенного в полётный контроллер акселерометра нужно покрутить дрон в разные стороны. Это позволяет убедиться, что их показания соответствуют вашим движениям. Чтобы сделать это корректно, дрон следует взять в руки камерой к монитору или от себя и нажать кнопку «Reset Z-Axis Offset».
Сначала нужно наклонить дрон по оси Pitch вперёд и назад, затем по оси Roll влево и вправо, а потом по оси Yaw влево и вправо. Порядок не важен, главное — чтобы движения совпадали с отображением на мониторе.
Если всё соответствует, значит полётный контроллер работает корректно. Если же какая-либо ось ведёт себя зеркально, это означает, что полётный контроллер установлен на раме в неправильном положении. Эту проблему научимся исправлять позже. Важно запомнить, какая именно ось работает неверно.
![]()
4: Настройка портов (Ports tab)
Раздел Ports в Betaflight отвечает за настройку UART-портов, к которым подключаются различные периферийные устройства дрона, такие как радиоприёмник, GPS, телеметрия и другие. Если эти порты не активированы в меню Ports, соответствующие устройства работать не будут или не смогут передавать данные в полётный контроллер. Поэтому важно правильно включать и настраивать порты для обеспечения корректной работы всей периферии. Это ключевой этап для полноценного взаимодействия оборудования дрона с прошивкой Betaflight.
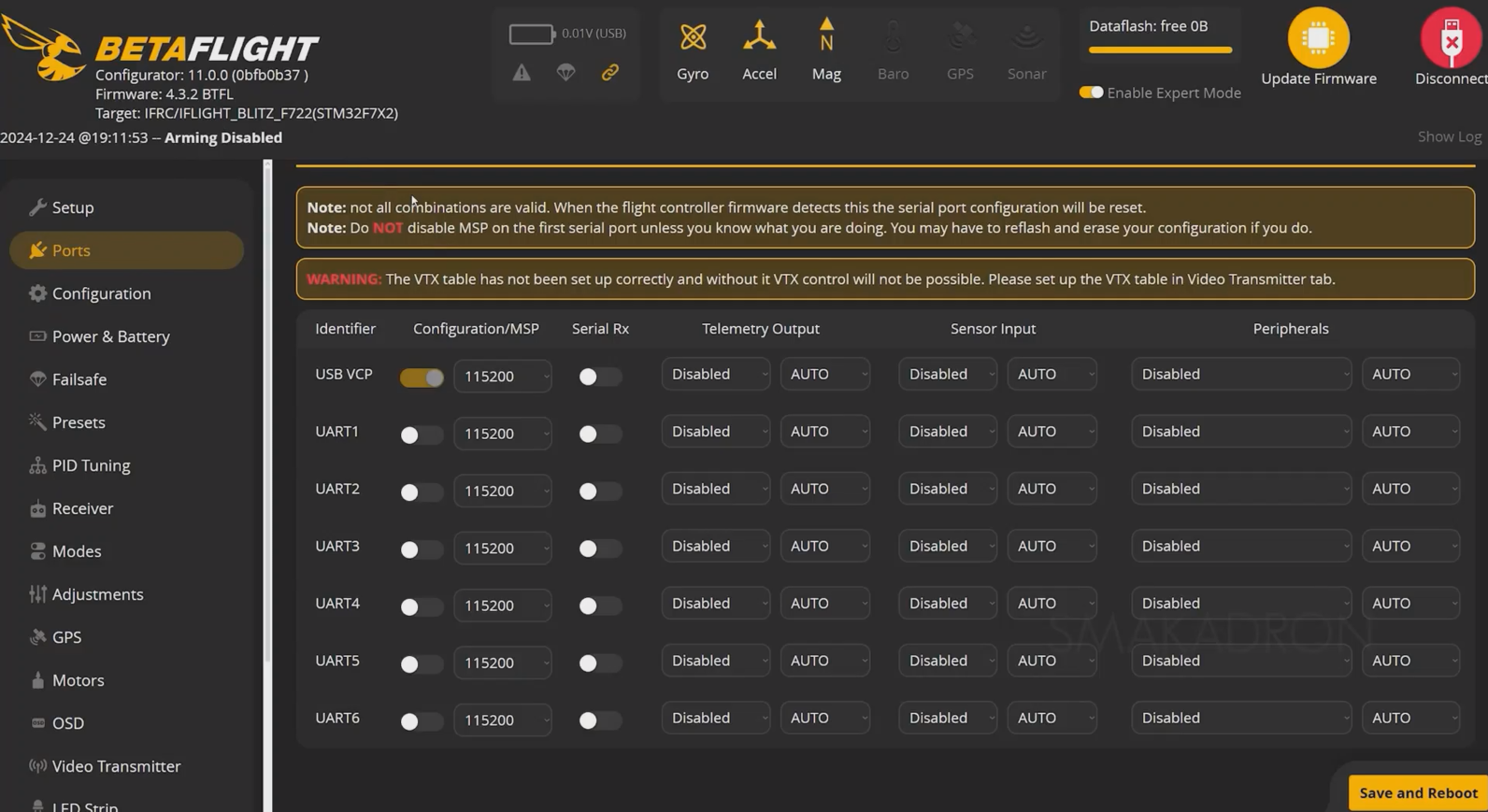
У вас будет несколько разных периферийных устройств, подключённых к разным UART-портам полётного контроллера. Например, GPS-модуль, радиоприёмник, видеопередатчик. В разделе Ports вы указываете полётному контроллеру, как читать данные с этих портов и что с ними делать. Каждый UART-порт имеет отдельные контакты TX и RX для передачи и приёма данных соответственно.
Это позволяет настроить корректное взаимодействие контроллера с каждым устройством, чтобы обеспечить правильную работу всей периферии дрона. Важно правильно включить и задать параметры портов согласно документации к вашему полётному контроллеру и подключённым устройствам
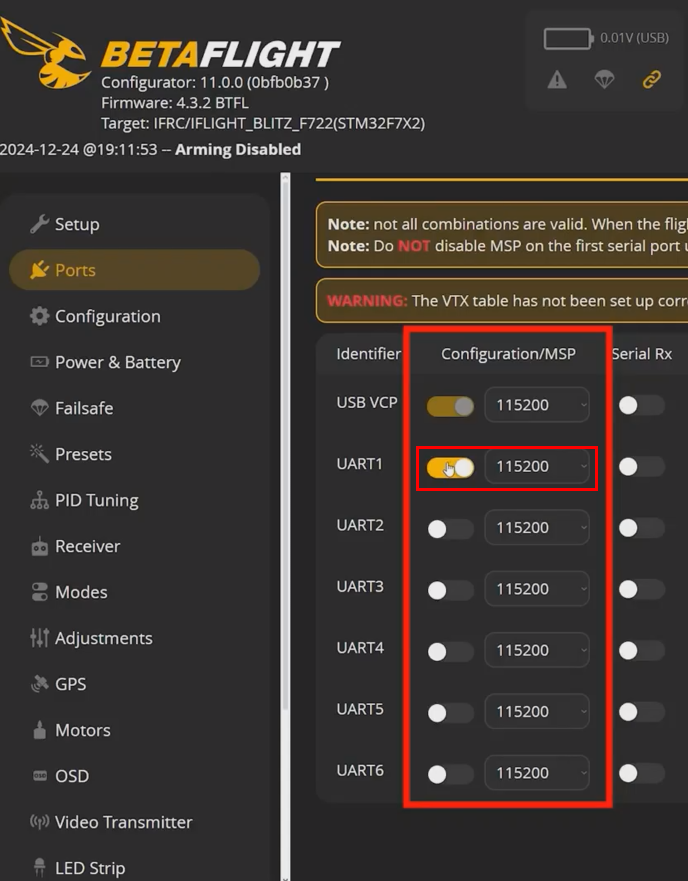
- Configuration/MSP(MultiWii Serial Protocol) ⇓ : Betaflight позволяет управлять и настраивать полётный контроллер через последовательный интерфейс с использованием протокола MSP (MultiWii Serial Protocol). MSP применяется для обмена данными между полётным контроллером и внешними устройствами, такими как наземные станции, OSD-системы и другие интерфейсы управления.
В настройках Ports в Betaflight, например, на UART1 ставится галочка Configuration/MSP, если к этому порту подключён цифровой видеопередатчик (VTX). Для аналоговой видеосистемы галочку ставить не нужно, поскольку она не использует этот протокол для управления. Активируя MSP на нужном UART, обеспечивается корректный обмен данными между контроллером и периферийным устройством
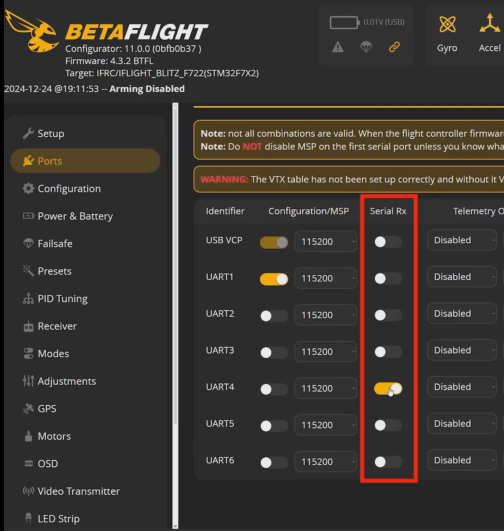
- Serial RX: ⇓
В Betaflight настройка последовательных приёмников, использующих протоколы передачи данных, такие как SBUS, IBUS, Spectrum, Crossfire, LRS и другие, осуществляется через UART-порты. Приёмники, подключённые к последовательному порту UART, передают команды с пульта управления на полётный контроллер.
Если приёмник подключён к, например, UART4, необходимо активировать UART4 в столбце Serial RX на вкладке Ports. Это позволит полётному контроллеру получать и обрабатывать управляющие сигналы с приёмника. Правильное включение и настройка соответствующего UART-порта — обязательное условие для корректной работы приёмника и управления дроном.
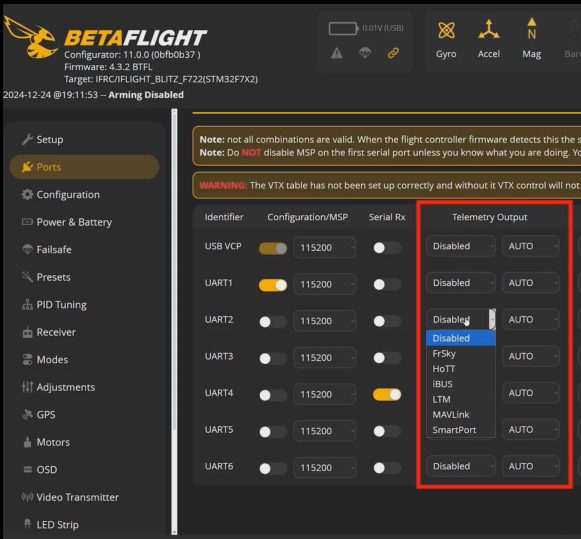
- Telemetry Output: ⇓
Telemetry Outputs в Betaflight используется для более старых радиосистем, которые требуют отправки телеметрических данных обратно к приёмнику через отдельный UART-порт, отличный от того, что используется для управления. В некоторых случаях может понадобиться настроить скорость передачи данных для такого устройства.
Современные радиосистемы, такие как Crossfire и ExpressLRS, используют двустороннюю связь по одному порту, позволяя передавать телеметрию и команды управления одновременно через Serial RX порт. Поэтому для них настройка отдельного Telemetry Output обычно не требуется.
Для использования Telemetry Output в Betaflight нужно на вкладке Ports включить соответствующий UART и выбрать Telemetry Output, чаще всего это SmartPort для старых приёмников, требующих отдельной линии передачи телеметрии
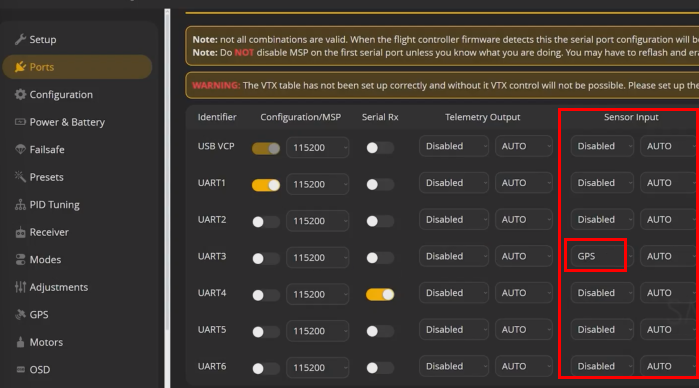
- Sensor Input: ⇓
Sensor Input в Betaflight используется для того, чтобы порт мог принимать данные от подключённого внешнего датчика, например, телеметрию от ESC или модуль GPS. В нашем случае ⇓ модуль GPS подключён к UART3, и для корректной работы нужно в настройках портов активировать Sensor Input для UART3 с выбором GPS.
Это позволяет полётному контроллеру получать данные с GPS, которые используются для функций навигации, телеметрии и режимов, таких как GPS Rescue. При этом в настройках можно указать скорость передачи данных (baud rate), обычно оставляют AUTO или выбирают рекомендованные значения (например, 38400 для GPS с частотой обновления 10 Гц).
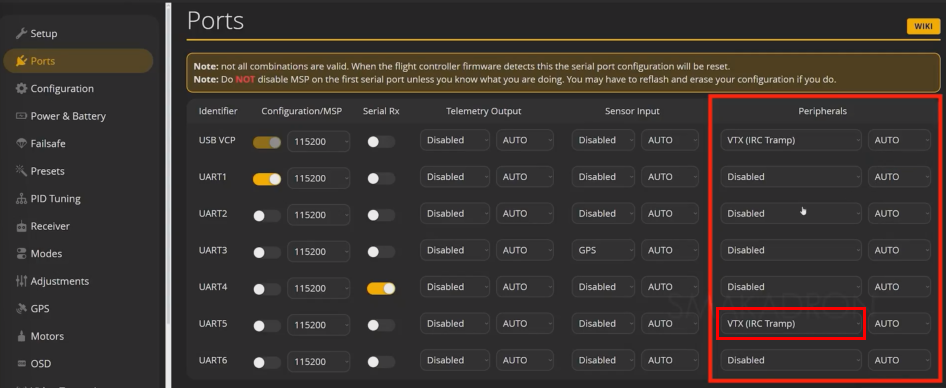
- Peripherals (Периферийные устройства) ⇓ :
Раздел Peripherals (Периферийные устройства) в Betaflight позволяет полётному контроллеру управлять подключёнными устройствами, такими как аналоговые видеопередатчики, камеры, внешние OSD и чёрные ящики. Для работы аналогового видеопередатчика необходимо выбрать правильный протокол, на котором он работает — эту информацию обычно можно найти в описании самого видеопередатчика.
Если протокол неизвестен, можно менять его поочерёдно, наблюдая, появится ли телеметрия на видеоизображении, что свидетельствует о корректной работе. Также нужно указать UART-порт, к которому припаян видеопередатчик, и выбрать соответствующий протокол.
Таким образом, правильная настройка периферийных устройств обеспечивает корректное управление и взаимодействие видеопередатчика с полётным контроллером.
После внесения изменений в настройках нужно обязательно нажать на кнопку Save & Reboot, чтобы их сохранить. Если забыть это сделать, все эти внесенные настройки не сохранятся.
![]()
5: Конфигурация (Configuration)
Раздел Configuration в Betaflight является одним из самых важных, поскольку он позволяет настроить основные параметры вашего дрона.
Подробно о вкладке Configuration можно посмотреть здесь Configration Tab
System Configuration
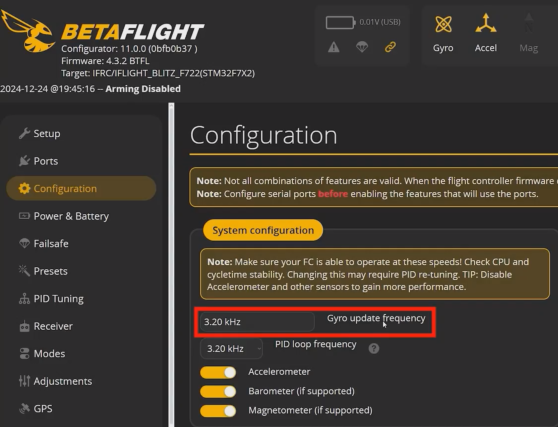
- Gyro Update Frequency (Частота обновления гироскопа) ⇓ :
Gyro Update Frequency (Частота обновления гироскопа) определяет, как часто полётный контроллер получает данные от гироскопа, который измеряет угловую скорость дрона и помогает поддерживать стабильность и точность полёта. Более высокие частоты обновления дают более актуальную информацию о положении дрона, что улучшает реакцию и точность, особенно при быстрых манёврах.
В современных версиях Betaflight частота обновления гироскопа устанавливается автоматически и блокируется на оптимальном значении для конкретного датчика. Например, для MPU6000 это обычно 8 кГц, для BMI270 — 3.2 кГц. Это значит, что частоту менять обычно не нужно.
Частота обновления гироскопа влияет на PID Loop Frequency — скорость расчёта управляющих сигналов. Часто PID Loop ставят на ту же частоту или вдвое ниже для обеспечения стабильности и снижения нагрузки на процессор. При настройке важно следить, чтобы загрузка ЦПУ оставалась в пределах 75%, иначе возможна нестабильная работа контроллера.
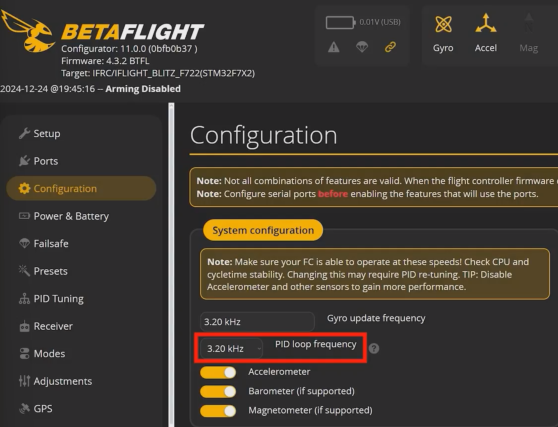
- PID Loop Frequency (Частота циклов PID-регулятора) ⇓ :
PID Loop Frequency — это ключевой параметр настройки полётного контроллера, определяющий, как часто контроллер вычисляет корректировки для стабилизации дрона во время полёта. Чем выше частота, тем чаще проводятся вычисления, что уменьшает задержку между измерениями датчиков и реакцией контроллера, повышая стабильность и точность управления.
Однако более высокая частота PID требует большей вычислительной мощности контроллера. Рекомендуемые комбинации настроек включают:
-
2 кГц с DShot150,
-
4 кГц с DShot300,
-
8 кГц с DShot600.
Выбор подходящей частоты зависит от возможностей аппаратного обеспечения и конкретных задач, при этом слишком высокая частота может привести к перегрузке процессора и нестабильной работе системы.
Правильная настройка PID Loop Frequency в сочетании с частотой обновления гироскопа и фильтрацией помогает достичь оптимальной плавности и точности полёта дрона
-
- Accelerometer (Акселерометр) ⇑ :
Акселерометр — это датчик, который измеряет ускорение по трём осям X, Y и Z, позволяя определить положение дрона в пространстве. Он помогает отслеживать изменения скорости и направления движения, что важно для стабилизации и управления дроном. Акселерометр используется для автоматического выравнивания дрона в таких режимах полёта, как Angle и Horizon, что особенно полезно для новичков.
Включение акселерометра в Betaflight рекомендуется для улучшения точности и стабильности полёта, так как он дополняет данные гироскопа, обеспечивая менее дрожащие и более плавные реакции управления
- Barometer (Барометр) ⇑ :
Барометр в дроне измеряет атмосферное давление, которое изменяется с высотой. Чем выше поднимается дрон, тем ниже давление воздуха. По этим изменениям барометр определяет высоту дрона над землёй. Это важно для поддержания устойчивой высоты, управления и работы систем автоматического возврата домой.
Если у вашего дрона есть встроенный барометр, рекомендуется включить его в настройках. Барометрический датчик позволяет более точно определять высоту полёта, что особенно полезно в режимах с удержанием высоты и возвратом.
- Magnetometer (Магнитометр) ⇑ :
Магнитометр (компас) измеряет магнитное поле Земли по трём осям и определяет направление, в котором ориентирован дрон. Это позволяет корректно определять курс и направление движения аппарата. Магнитометр помогает дрону ориентироваться в пространстве, что важно для автопилота и систем автоматического возврата домой (Return to Home).
Если у вас есть магнитометр, его обязательно нужно включить в настройках. Для корректной работы требуется калибровка магнитометра, которая учитывает влияние окружающих магнитных помех и наклонов дрона. Совместное использование магнитометра с гироскопом и GPS даёт точную и стабильную навигацию дрона.
Personalisation
- AirCraft Name ⇓
Параметр AirCraft Name в Betaflight позволяет присвоить имя вашему дрону. Это имя отображается в экранном меню OSD, в журналах чёрного ящика (Blackbox) и при выводе команд CLI, таких как diff или dump. Назначение имени помогает удобнее идентифицировать конкретный аппарат при настройке и анализе полётов.
Для установки имени нужно в Betaflight Configurator на вкладке Configuration внизу найти поле «Craft Name» и ввести нужное название дрона, затем сохранить изменения. Это простая и полезная настройка для персонализации и удобства работы с вашим дроном.
Camera
- FPV Camera Angle ⇓
FPV Camera Angle (Угол наклона камеры FPV) используется в Betaflight для установки угла наклона камеры, что влияет, например, на отображение искусственного горизонта на экране. Эта настройка применяется только при включённом акселерометре.
Угол камеры помогает контроллеру компенсировать визуальную разницу из-за наклона камеры относительно корпуса дрона. Например, если камера наклонена вперёд на 30 градусов, Betaflight добавляет соответствующие корректировки к управлению, чтобы повороты выглядели "естественными" относительно угла обзора.
Это особенно полезно для видеосъёмки и кинематографического полёта, так как помогает держать горизонт ровным, а изображение стабильным при движении и поворотах. В настройках Betaflight этот параметр обычно вводится в градусах и корректируется вручную.Теперь рассмотрим процесс перепрошивки полётного контроллера до новых версий прошивки или отката на предыдущие версии. Новые версии прошивки обычно содержат оптимизации, которые позволяют дрону работать эффективнее и стабильнее. Каждое обновление может добавлять новые функции и возможности, например, новые режимы полёта, улучшенные алгоритмы стабилизации, расширенные настройки и многое другое.
Также обновления часто включают исправления известных ошибок и проблем, что улучшает общую работу дрона и снижает вероятность возникновения неисправностей во время полёта.

Arming
- Maximum ARM Angle ⇓
Maximum ARM Angle в Betaflight устанавливает максимальный угол наклона дрона, при котором возможно включение двигателей (арминг). Это ограничение предотвращает запуск моторов, если дрон находится в слишком наклонном или перевёрнутом положении, что снижает риск аварийного запуска.
Рекомендуется установить этот параметр на 180 градусов, чтобы разрешить арминг в любом положении дрона, что упрощает управление в различных ситуациях, включая взлёт после падения или переворота. Эта настройка задаётся через CLI командой:
set small_angle = 180 saveТакой угол гарантирует, что вы сможете активировать двигатели независимо от текущего наклона аппарата
Другие настройки:
Other Features
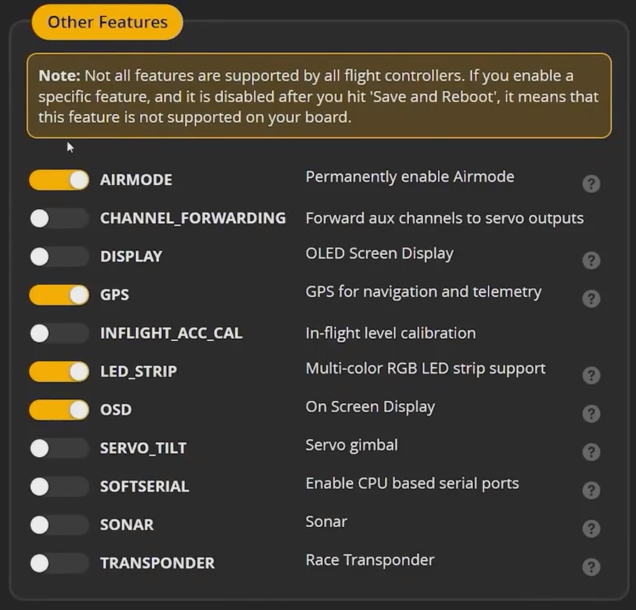
- AirMode: функция, которая позволяет квадрокоптеру сохранять контроль над угловым положением и стабилизацию, даже когда газ сброшен до нуля. Это значит, что ПИД-регуляторы продолжают работать, поддерживая ориентацию и обеспечивая плавность и стабильность управления в любых ситуациях, включая свободное падение или выполнение акробатических трюков.
- Channel Forwarding (Перенаправление каналов): функция, которая позволяет передавать управляющие сигналы с AUX-каналов радиоуправления напрямую на выходы сервоприводов (PWM pins). Это полезно, когда требуется управлять сервоприводами (например, камерами с сервомоторами, подвесами, камерами с возможностью наклона) или другими устройствами, используя дополнительные каналы радиоуправления.
- Display: Включает функцию отображения, которая позволяет использовать небольшой OLED-дисплей для отображения разнообразной информации. Не рекомендуется использовать в наше время, так как замедляет загрузку.
- GPS: Включите, если имеете на дроне GPS модуль.
- Inflight_ACC_Cal: Позволяет откалибровать акселерометры во время полета.
- LED Strip: Если хотите использовать светодиодную подсветку, эта функция позволяет управлять светодиодами.
- OSD: Позволяет настраивать телеметрию вашего дрона и отображать ее на видеоизображении камеры. Обязательно ставим галочку.
- Servo Tilt: Позволяет вам настроить угловое положение камеры или другого устройства с помощью сервопривода.
- Soft Serial: Эмулирует последовательный порт на другом выходе или разделяет пару RX-TX UART, позволяет использовать его как дополнительный UART.
- Sonar: Включает поддержку сонара, если он у вас есть.
- Transponder: Эта функция используется преимущественно в гоночных FPV-дронах для отслеживания времени прохождения дрона на трассе. Транспондер передает уникальный сигнал, который принимается специальным считывателем.
Board and Sensor Alignment
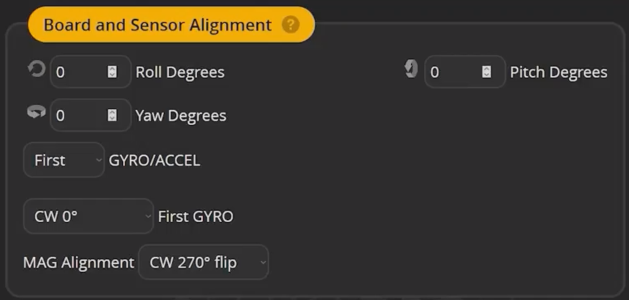
- Модуль позволяет правильно настроить датчики полетного контроллера, если они установлены нестандартным способом на дроне. Если во вкладке SETUP при калибровке движение или положение 3D-модели дрона отображается по какой-либо оси неверно (например "вверх ногами" / зеркально по оси ROLL), это свидетельствует о неправильном ориентировании полетного контроллера относительно рамы (в нашем случает, по оси ROLL, поэтому нужно изменить значение Roll Degrees на 1800). Проблему можно исправить именно здесь.
- GYRO/ACCEL - Если в вашем контроллере есть два гироскопа, вы можете выбрать, какой из них использовать. По умолчанию first (первый).
- First GYRO - Значение направления первого гироскопа по умолчанию (
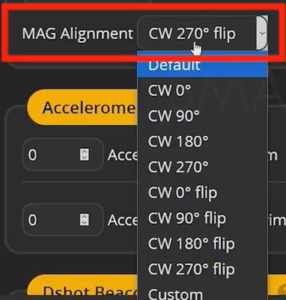
CW 00- ноль градусов относительно курса "прямо") - Mag Alignment (Выравнивание магнитометра): Относится к настройке ориентации магнитометра / компаса относительно полетного контроллера. Это важно для точного определения направления. Значения Default, Clockwise 90, Clockwise 180, Clockwise 270 и пр. соответствуют способу монтажа магнитометра на вашем дроне.
Accelerometer Trim
Модуль Accelerometer Trim компенсирует систематическую погрешность или смещение показетелей датчика акселерометра, вызывающее неоптимальное выравнивание или дрейф дрона в режимах удержания угла (Angle, Horizon). Он позволяет подстроить «нулевой уровень» акселерометра, чтобы дрон лучше держал горизонт и не дрейфовал в полёте.
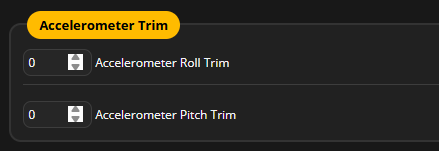
- Trim используют, если заметен самостоятельный дрейф дрона в режиме с акселерометром, когда при нейтральном положении стиков он уходит в сторону.
- Accelerometr Roll Trim - корректировка по оси ROLL
- Accelerometr Pitch Trim - корректировка по оси Pitch
- Калибровка начинается с правильного нулевого уровня акселерометра, а потом можно подкорректировать Trim для точной настройки.
- После настройки следует сохранить параметры, чтобы они сохранялись при перезагрузке.
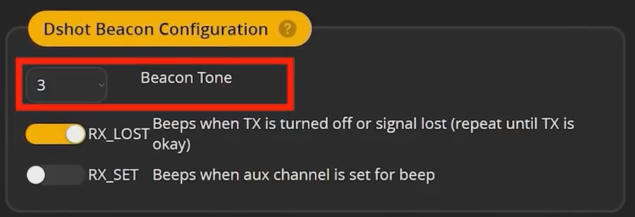
- D-Shot Beacon Configuration: Настройка позволяет средствами протокола D-Shot заставить двигатели резонировать и издавать звук. Хорошая альтернатива настоящему зумеру. Можно выбрать громкость (Beacon Tone) уровнями от
1 до 5. В полете использовать нельзя. - RX_LOST - предназначен для индикации и управления ситуацией, когда приёмник перестаёт получать сигнал от передатчика (TX) — то есть сигнал теряется или передатчик выключен. При активации RX_LOST дрон подаёт звуковой сигнал (например, через бипер), предупреждая о потере сигнала, и это оповещение повторяется до восстановления сигнал.
- RX_SET - используется для включения или отключения звукового сигнала (бипера) по команде с пульта управления. При активации RX_SET квадрокоптер начинает издавать звуковой сигнал, который может помочь, например, при поиске потерянного дрона или для других ситуаций, когда хочется запустить звуковое оповещение вручную с пульта.
Beeper Configuration
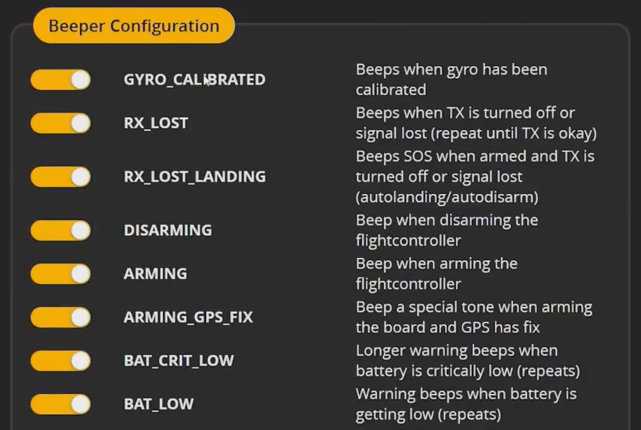
Beeper Configuration (Конфигурация звукового сигнала) - Позволяет настраивать поведение звукового сигнала дрона для индикации различных состояний или событий (калибровка гироскопа, потеря сигнала (RX Loss), низкий заряд батареи, получение GPS-фиксации, готовность к полету, включение питания и многие другие).
- Не забывайте нажать кнопку SAVE & REBOOT для сохранения сделанных изменений.
- Подробно о звуковых сигналах в приложении НИЖЕ
6: Питание и Аккумулятор (Power & Battery)
Подробный конспект по вкладке питания ⇒ POWER & BATTERY TAB
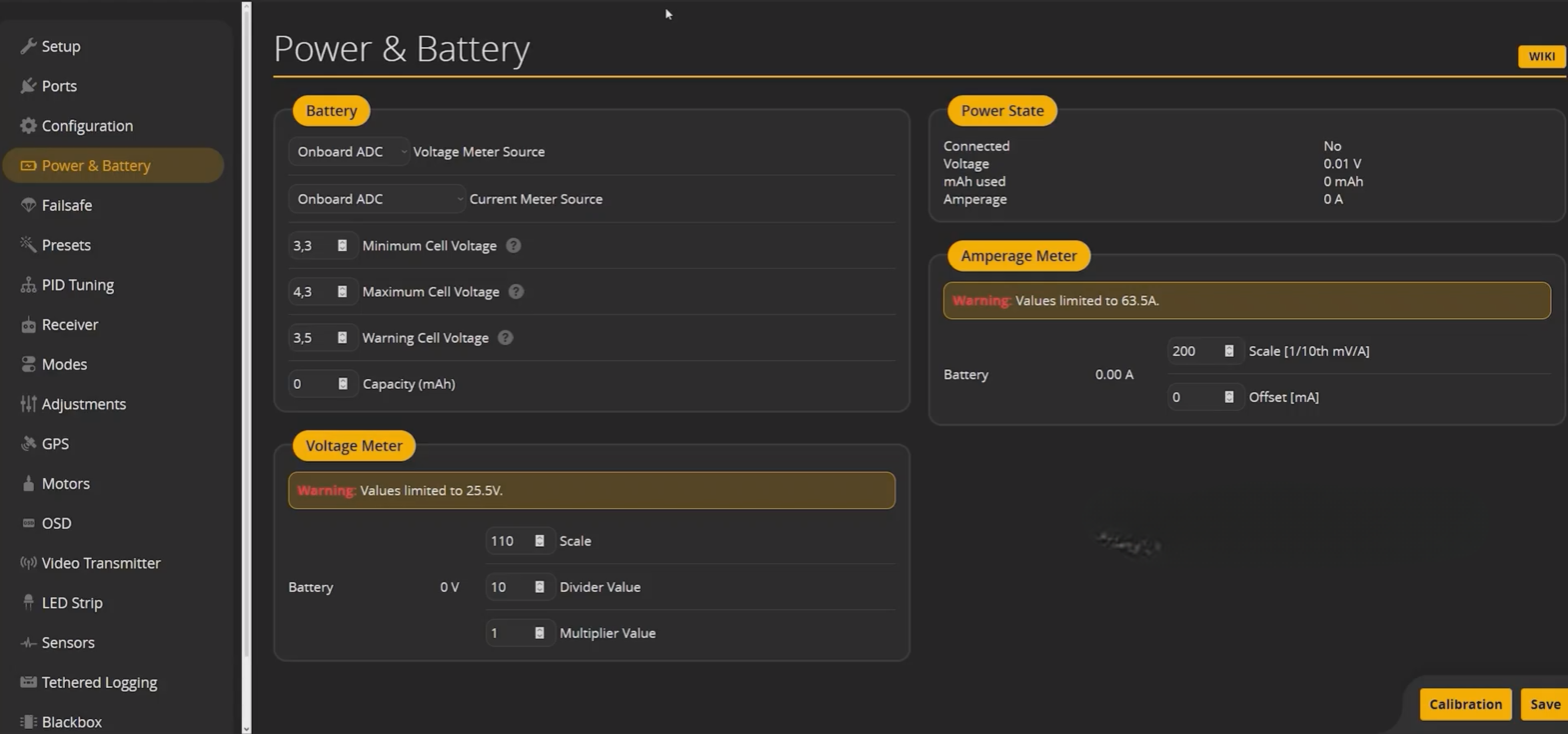
В этом разделе можно настроить и мониторить параметры питания и аккумулятора вашего дрона.
Battery
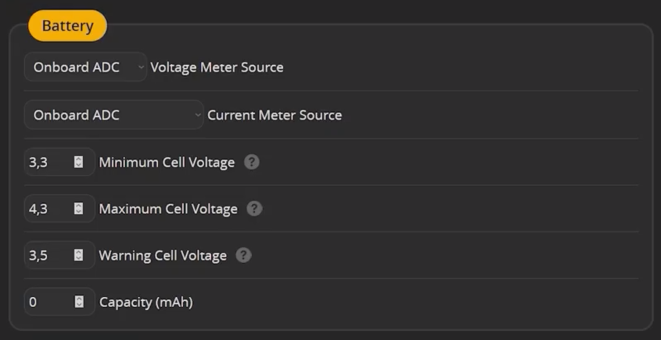
- Voltage Meter Source (Источник для измерения напряжения):
- NONE – измерение напряжения недоступно.
- ESC Sensor – использует телеметрию ESC, чтобы получить измерение напряжения.
- Onboard ADC – использует ADC (аналого-цифровой преобразователь) на контроллере полета, чтобы получить измерение напряжения.
- Current Meter Source (Источник для измерения тока):
- NONE – измерение тока недоступно.
- ESC Sensor – использует телеметрию ESC, чтобы получить измерение тока.
- Onboard ADC – использует ADC на контроллере полета, чтобы получить измерение тока.
ESC-сенсор может обеспечить более точное измерение тока и напряжения, поскольку он расположен ближе к ESC.
- Minimum / Maximum Cell Voltage (Мин./Макс. напряжение на элементе): Предупреждение о низком напряжении должно быть установлено на значение, при котором вы еще сможете безопасно приземлиться (обычно 3.6-3.5 В). Минимальное напряжение должно быть установлено на значение, при достижении которого повреждение аккумулятора будет неизбежно (обычно 3.3 В для LiPo). Если вы снизите напряжение аккумулятора ниже 3.3 В для LiPo, аккумулятор начнет повреждаться.
- Warning Cell Voltage - напряжение на одну ячейку аккумулятора, при достижении которого полётный контроллер начинает подавать предупреждающий сигнал (обычно звуковой бипер) о снижении заряда батареи. Это предупреждение помогает пилоту вовремя заметить низкий заряд и безопасно приземлиться до того, как аккумулятор разрядится критически.
- Capacity (Ёмкость аккумулятора): В миллиампер-часах (mAh), используется для вычисления оставшейся ёмкости аккумулятора в процентах.
Voltage Meter
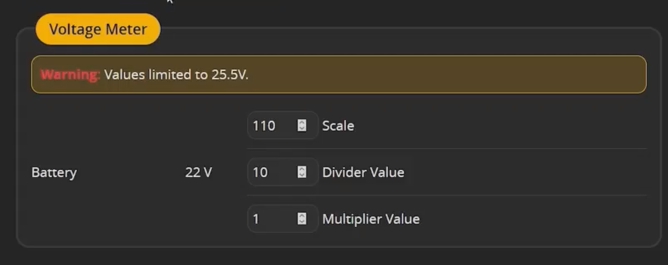
- Voltage / Current Meter Scale (Масштаб вольтметра/амперметра): Настройка для правильного измерения напряжения и тока аккумулятора. Не рекомендуется вносить изменения в эти значения без необходимости. Изменения требуются только при неправильных отображениях.
После внесения изменений, нажимаем Save.
![]()
7: Отказоустойчивость (Failsafe)
Failsafe - функция безопасности, которая активируется в случае потери сигнала между дроном и пультом управления или при других неисправностях. Эта функция помогает предотвратить аварии и потерю дрона, обеспечивая его безопасное возвращение или выполнение определенного действия в целях обеспечения безопасности или причинения минимального ущерба.
Failsafe Stage (Этапы Failsafe): Это этапы или шаги, которые выполняет дрон в случае потери сигнала или возникновения другой критической ситуации.
- Stage 1. Pre-Failsafe: Дрон проверяет, действительно ли сигнал потерян, и пытается восстановить связь с пультом управления. Если сигнал не восстанавливается в течение определенного времени (несколько секунд), дрон переходит к следующему этапу.
- Stage 2. Immediate Actions (Немедленные действия):
- Drop – Падение. Дрон быстро выключает моторы и падает.
- Land – Приземление. Дрон автоматически приземляется в текущем месте.
- GPS Rescue – Возврат домой. Если у дрона есть GPS, он возвращается к точке запуска.
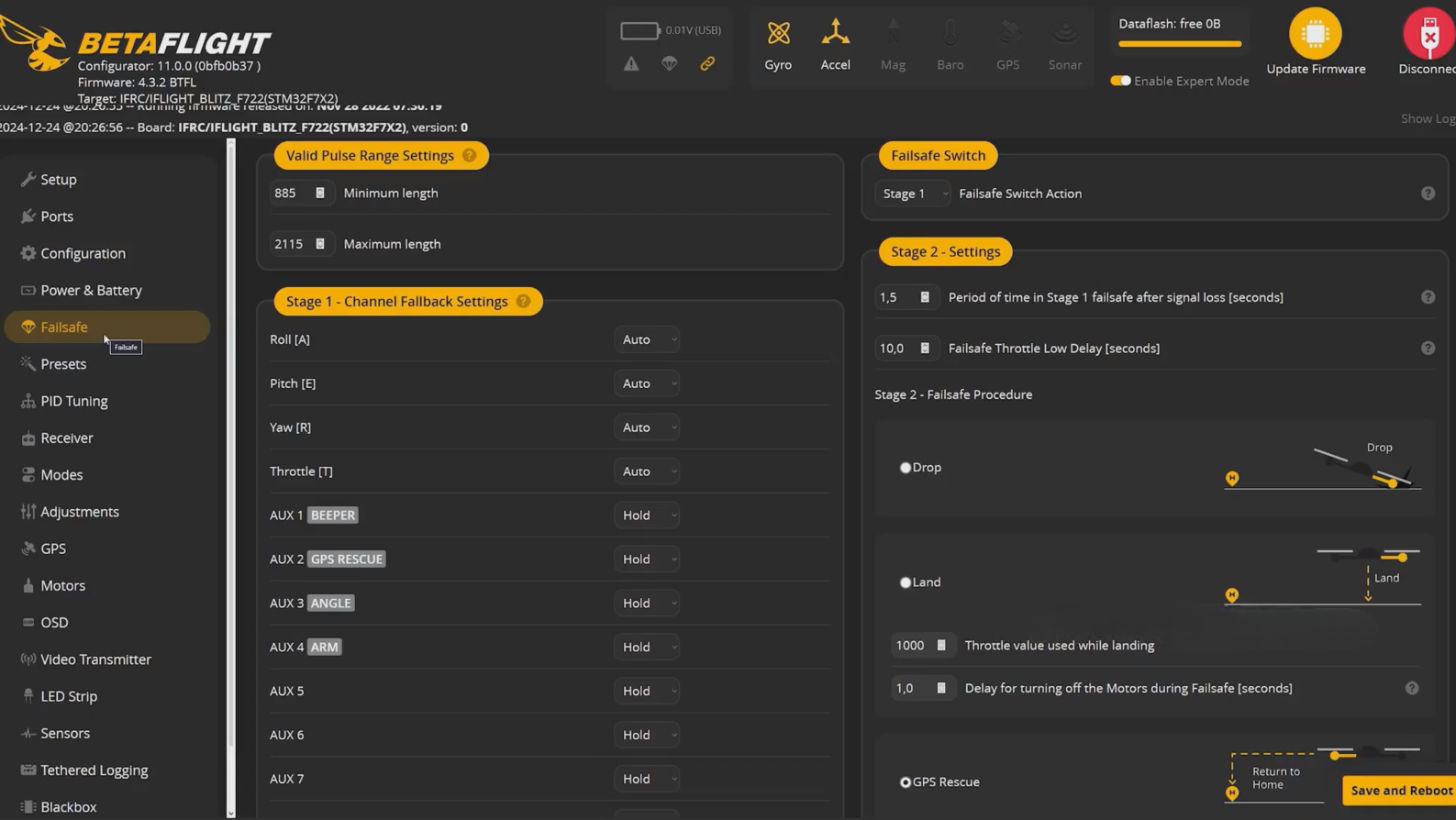
Failsafe Switch
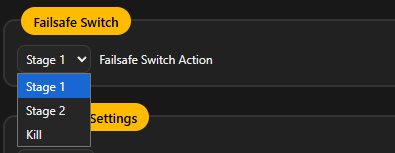
Это настройка определяет, какой этап фейлсэйфа будет активирован при ручном включении режима Failsafe с помощью переключателя Failsafe Aux Mode на вашей аппаратуре управления дроном.
Stage 1 — активирует сначала этап/stage 1, а затем этап/stage 2 фейлсэйфа в обычной последовательности. Это полезно, если вы хотите симулировать поведение фейлсэйфа при потере сигнала.
Stage 2 — пропускает этап/stage 1 и сразу же активирует процедуру этапа/stage 2.
Kill — немедленно деактивирует (дизармит) дрон. При этом он упадёт.
Valid Pulse Range Settings:
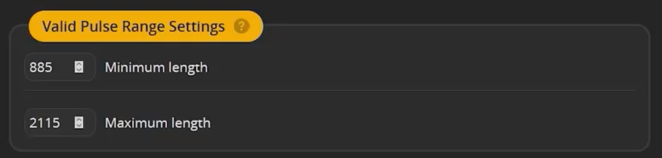
Используется для настройки диапазона действительных импульсов, которые приемник будет считать валидными. Рекомендуется не трогать без необходимости.
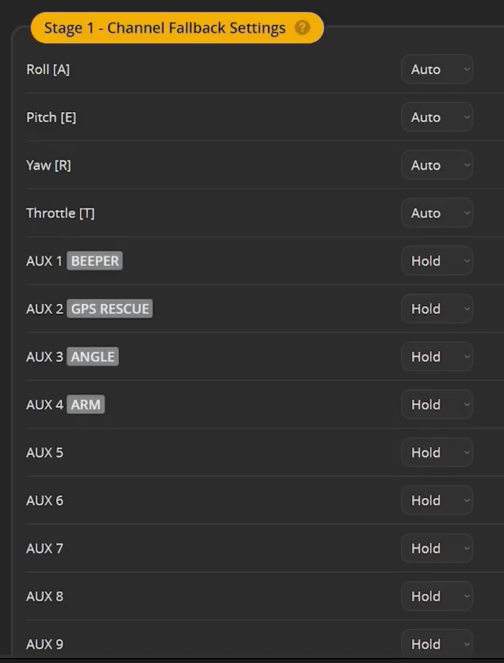
Stage 1 - Channel Fallback Settings
Настройка каналов для Stage 1. Вы можете установить поведение для каждого канала отдельно (Roll, Pitch, Yaw, Throttle и AUX) при потере сигнала приёма от передатчика (фейлсейф, «fallback»).
Что такое Channel Fallback в Betaflight?
Channel Fallback — это механизм, активируемый, когда FC (Flight Controller) теряет приём радио-сигнала (например, если связь с пультом пропала). Вместо полной остановки или аварийного выключения, Betaflight может временно подменить значения каналов управления, чтобы выполнять предопределённое поведение.
-
Roll [A], Pitch [E], Yaw [R], Throttle [T] — основные каналы управления аппаратом.
-
AUX 1 ... AUX 12 — дополнительные каналы — обычно коммутаторы на пульте, управляющие режимами или функциями (например, Beeper, GPS Rescue, Angle Mode, Arm и др.).
Каждому каналу можно назначить одну из следующих реакций на потерю сигнала:
Возможные варианты настроек fallback для каждого канала:
-
Auto
Автоматический режим. Betaflight пытается выбрать разумное поведение по умолчанию для основных каналов. Обычно это значит удержание последних известных значений, чтобы коптер не дергался. -
Hold
Удерживать последнее значение канала при потере сигнала. Например, если дроссель был на 50%, он останется таким. Это часто используется для AUX-каналов, т.к. там важна стабильность состояния переключателей. -
Set
Установить канал в определённое фиксированное положение (например, ноль или максимум). Это бывает полезно для безопасности, чтобы заставить коптер перейти в заранее известный режим.
Разбор по скриншоту ниже
-
Roll, Pitch, Yaw, Throttle — установлены в Auto — FC будет пытаться удержать последние или предсказуемые значения для безопасного поведения при потере сигнала.
- Значение
Газ / Throttleрекомендуется устанавливать в значение соответствующее состоянию "висения" дрона (1250 - 1275). По умолчанию газ дрона на этапе Stage 1 устанавливается в положение0(и он начнет падать).AUX 1—4 заданы на Hold с дополнительными метками:
-
BEEPER — пейджер или зуммер, может включаться для звукового оповещения
-
GPS RESCUE — функция автовозврата GPS, обычно включает возврат домой при потере сигнала
-
ANGLE — режим полёта стабилизации угла наклона (для новичков или безопасного зависания)
-
ARM — арминг моторов (включение/выключение)
-
-
Все остальные AUX-каналы зафиксированы на Hold, чтобы сохранять их состояния.
Зачем это нужно?
При потере связи коптер сможет:
-
Стабильно удерживать последние положения органов управления (чтобы не произошло резких «рывков»)
-
Активировать безопасные режимы (GPS Rescue, Angle Mode и включить beeper для поиска)
-
Оставаться включённым или наоборот выполнить безопасный disarm (в зависимости от настройки ARM)
Это важно для предотвращения аварий и потери коптера.
Stage 2 - Settings
Stage 2 активируется, если коптер находился в Stage 1 (канальные fallback) определённое время, указанное в первом параметре, и сигнал так и не восстановился. На этом этапе включается "аварийная" процедура безопасного завершения полёта.
Объяснение параметров и опций
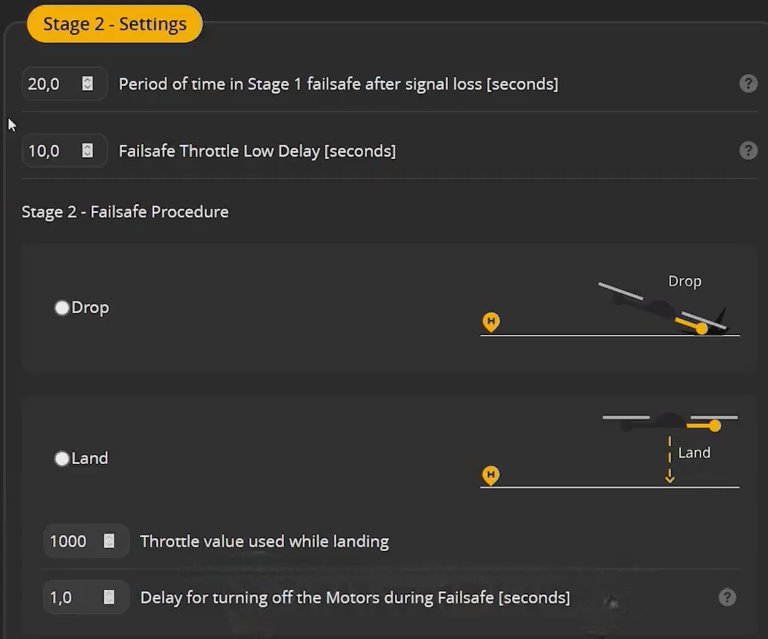
-
Period of time in Stage 1 failsafe after signal loss [seconds]
Здесь указано время (20 секунд), сколько коптер будет ждать в режиме Stage 1 после потери сигнала, прежде чем перейти в Stage 2. -
Failsafe Throttle Low Delay [seconds]
Задержка (10 секунд) перед срабатыванием фейлсейфа по газу, если он низкий (например, для избежать ложных триггеров).
Stage 2 - Failsafe Procedure (процедура)
Есть 3 основные опции, что делать при переходе в Stage 2:
1. Drop (Сброс, падение)
-
Коптер просто отключает моторы и падает с текущей высоты.
-
Используется, когда нельзя или нежелательно пытаться приземлиться.
-
Быстрее, но риск повреждения аппарата выше.
2. Land (Автоматическая посадка)
-
Коптер пытается плавно снизиться до земли с заданной скоростью (Throttle value used while landing).
-
После посадки моторы выключаются с задержкой (Delay for turning off Motors during Failsafe).
Это более безопасный способ, если есть достаточно высоты и включён барометр/датчики.
Параметры посадки:
-
Throttle value used while landing (1000 в данном примере) — уровень газа при снижении, влияет на скорость и плавность посадки.
-
Delay for turning off the Motors during Failsafe — задержка перед отключением моторов после посадки (1 секунда в примере).
Когда что использовать?
-
Drop — если коптер рядом с землёй, нет возможности безопасно снизиться, или если нужно максимально быстро остановить лопасти.
-
Land — если коптер в воздухе, имеет GPS/барометр, и можно безопасно выполнить уменьшение высоты и мягкую посадку, снижая риск повреждений.
3. GPS Rescue
Настройки позволяют коптеру автоматически подняться на безопасную высоту, вернуться к точке взлёта (Home) по GPS, а затем плавно снизиться в пределах настроек.
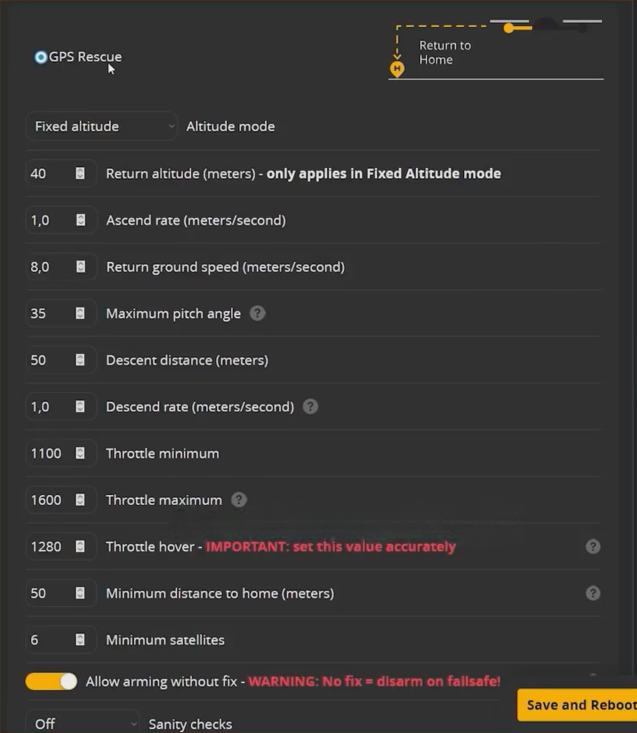
Детальные настройки для GPS Rescue (если выбран этот режим):
- Return Altitude Mode: Режим высоты возврата (текущая, фиксированная, максимальная).
- Return Altitude: Высота, на которой дрон полетит назад.
- Ascent / Descent Rate: Скорость набора высоты и снижения.
- Return Ground Speed: Скорость возврата.
- Maximum Pitch Angle: Максимальный угол наклона для возврата.
- Throttle Min / Max / Hover: Значения газа для возврата. Важно точно установить Throttle Hover.
- Minimum Distance to Home: Минимальное расстояние от начальной позиции для активации GPS Rescue. Если меньше – дрон упадет.
- Minimum Satellites: Минимальное количество спутников для активации GPS Rescue.
- Allow Arming without Fix: Позволяет запустить дрон без GPS-фиксации.
- Sanity Checks: Проверки работоспособности перед началом GPS Rescue. Рекомендуется включить (ON).
8: Пресеты (Presets)
Конспект "Как использовать Presets в Betafligt" ⇒ Пресеты
Presets (предустановки) предлагают простой способ настроить параметры. Это короткие фрагменты команд CLI, которые можно применить к вашей конфигурации дрона - все, начиная от предустановленных настроек и заканчивая настройками конкретного продукта. Вы также можете создать собственные стили и делиться ими с сообществом.
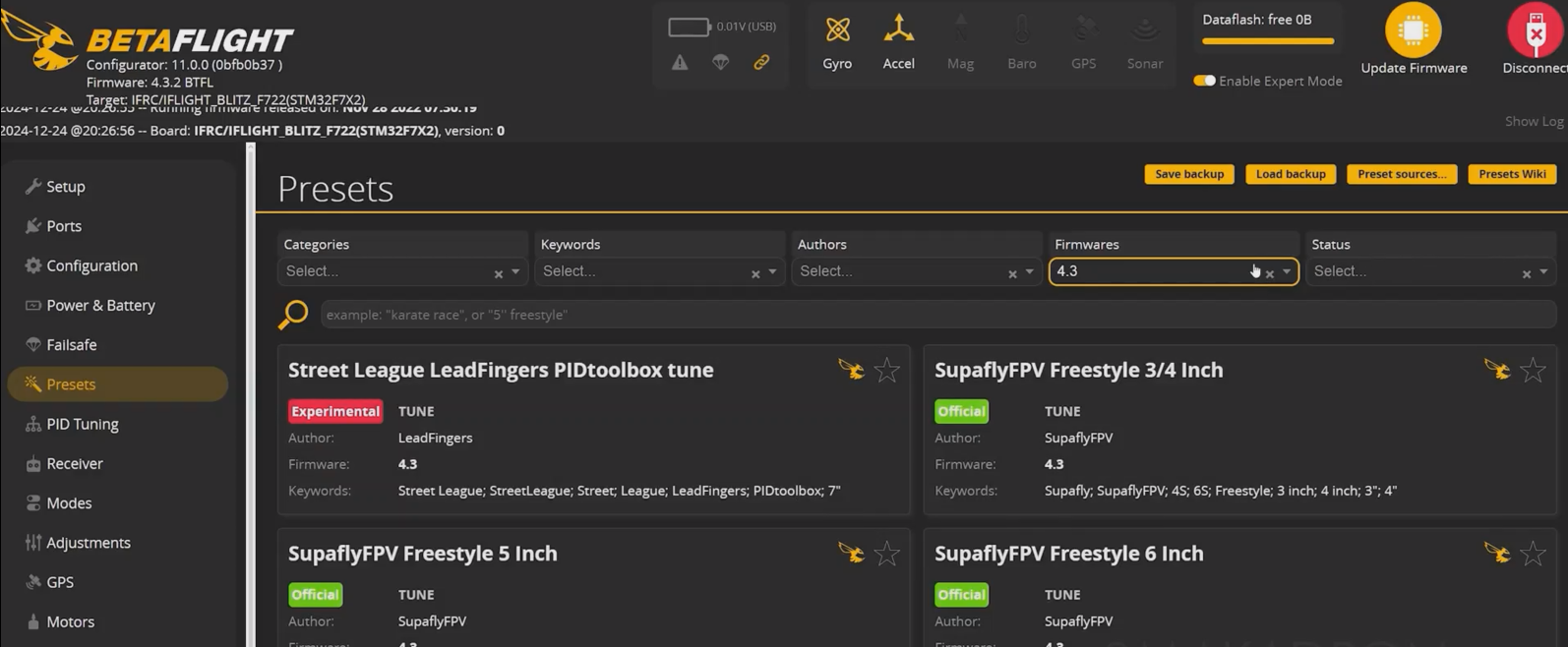
Позволяет быстро настроить ваш дрон, минимизируя необходимость ручного ввода параметров.
Возможность сохранять собственные конфигурации для повторного использования или для обмена с другими пилотами.
Позволяет применить сложные конфигурации, которые были оптимизированы опытными пилотами для определенных условий или типов полетов.
Пользоваться ими очень просто:
- Выберите нужный пресет из доступного списка или загрузите свой собственный.
- Примените пресет к вашей конфигурации, нажав на соответствующую кнопку.
- Сохраните изменения и перезагрузите контроллер.
![]()
9: PID-настройки (PID Tuning)
ПИД-регуляторы используются для поддержания стабильности и точности системы, уменьшая разницу между заданными значениями и фактическими выходными значениями.
Внимание: Большинство курсов не рекомендуют что-либо менять, если вы не проходили специальное обучение, потому что неверная настройка с большой вероятностью может спалить двигатели или дрон будет вести себя неадекватно во время полета.
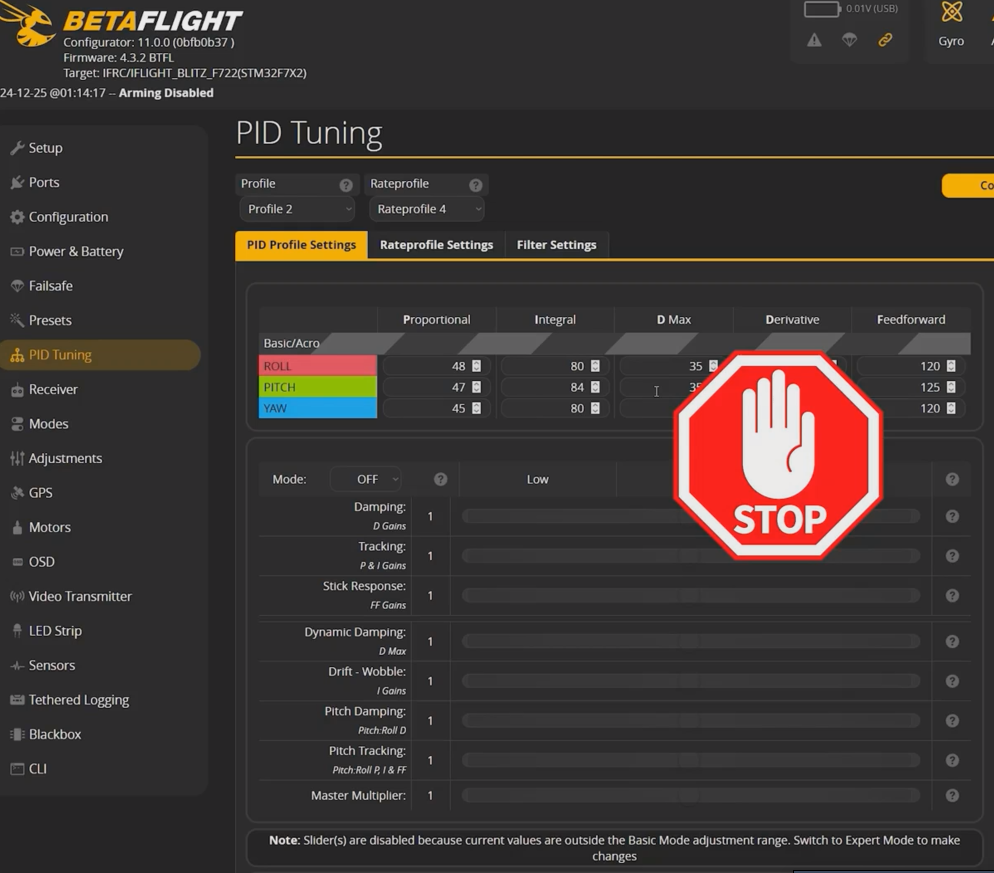
Это правильно. Но не знание основ регулирования PiD при самостоятельной сборке дрона, может привести к перегреву двигателей, неадекватному поведению в управлении и, в конце концов, к аварийной ситуации. PID регулирование - огромная и общирная тема. Пока оставьте все по умолчанию, но, сразу по факту сборки собственного квадрокоптера, вам придется изучать тему самостоятельно. Помощь можно получить на специализированных форумах и пабликах в Telegram.
Основы регулирования PID ⇒ Вкладка PID
10: Приемник (Receiver tab)
Вкладка Receiver подробно ⇒ Receiver
Раздел Receiver в Betaflight отвечает за настройку приемника сигналов управления вашего дрона. Здесь вы можете настроить тип протокола, каналы управления и другие важные параметры, чтобы обеспечить корректную работу дрона.
Для этого нужно подключить аккумулятор к дрону, чтобы в нем заработал приемник, и не забыть надеть на дрон антенну, чтобы не "спалить" видеопередатчик. Обязательно включаем радиопередатчик. Перед этим должен быть произведен его бинд с приемником.
Ключевые параметры и их назначение
Ниже рассмотрим пример конкретных настоек ⇓
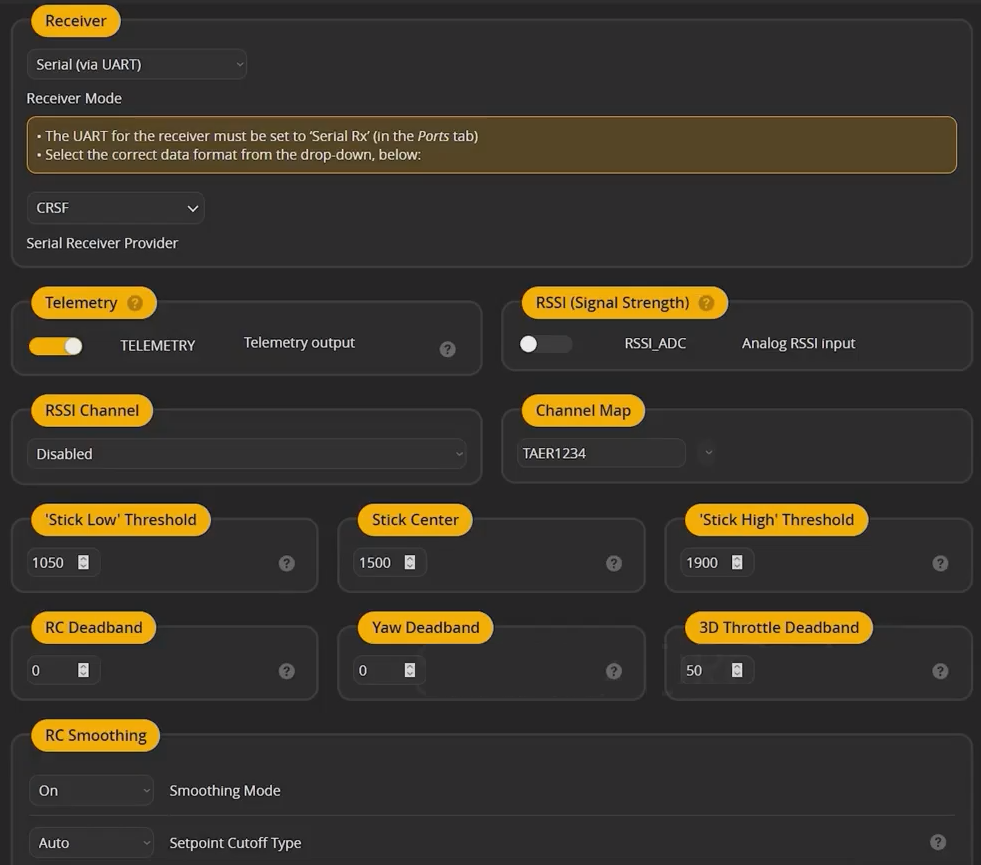
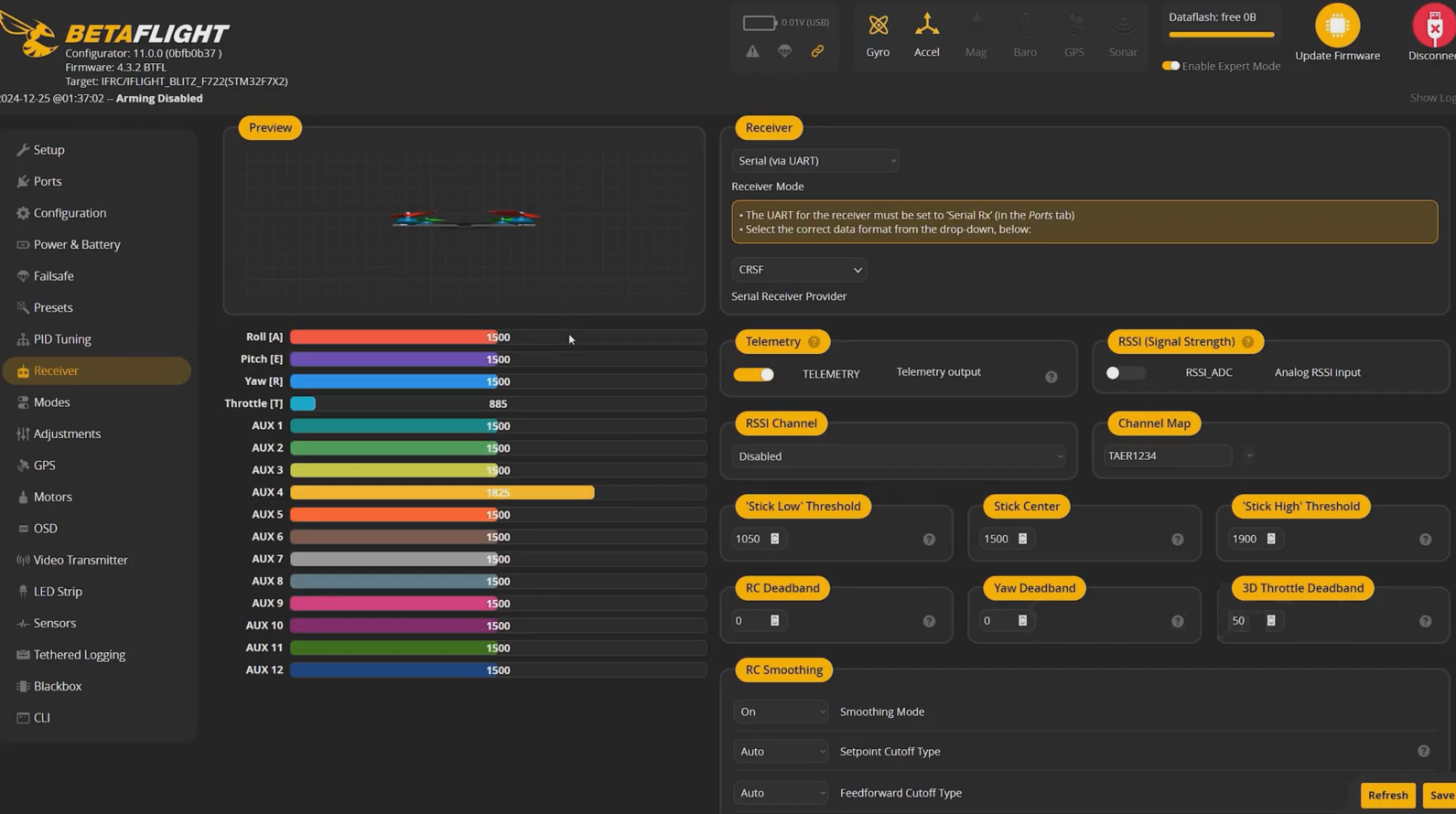
Receiver
Serial (via UART) — приёмник в примере подключён через UART (последовательный порт), требуется настройка соответствующего порта в «Ports».
Receiver Mode
-
Установлен режим CRSF — это протокол Crossfire/ExpressLRS для низкой задержки и высокой надёжности, часто используемый в FPV.
-
Serial Receiver Provider — выбор протокола работы приёмника, здесь выбран CRSF.
Telemetry — включена передача телеметрии на аппаратуру (от FC к радиопередатчику).
RSSI (Signal Strength) — возможность выбрать канал для RSSI (уровень приёма сигнала). RSSI_ADC отключён — аналоговый вход RSSI не используется.
RSSI Chanel
RSSI Channel — disabled / отключён, то есть RSSI в примере не выводится на отдельный канал AUX.
Channel Map
Channel Map: TAER1234 — задаёт соответствие каналов стикам аппаратуры:
-
T (Throttle) — Газ
-
A (Aileron) — Ролл
-
E (Elevator) — Питч
-
R (Rudder) — Yaw (рыскание)
-
1234 — дополнительные AUX‑каналы
Пороги стиков
'Stick Low' Threshold
'Stick Low' Threshold: 1050 — минимальное значение сигнала стика, ниже которого считается, что стик в крайнем нижнем положении.
Stick Center
Stick Center: 1500 — центральное положение стика (нормально для большинства аппаратур).
'Stick High' Threshold
'Stick High' Threshold: 1900 — значение сигнала стика в верхнем крайнем положении.
RC / YAW Deadband (зона нечувствительности)
RC Deadband, Yaw Deadband: 0 — в примере нет нечувствительной зоны (обычно ставят значение 3—5 для фильтрации дрожания стиков).
3D Throttle Deadband
3D Throttle Deadband: 50 — применяется для 3D-режима (переворот, инверсия моторов).
RC Smoothing
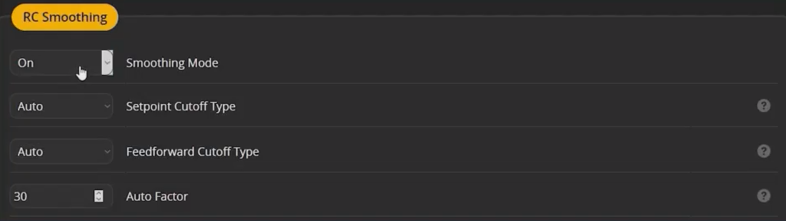
Подраздел RC Smoothing из конфигуратора Betaflight, управляющий цифровым фильтрованием (сглаживанием) радиосигналов от аппаратуры к полётному контроллеру.
Объяснение параметров RC Smoothing
-
Smoothing Mode (Режим сглаживания): Включение этой функции заставляет полётный контроллер «заглаживать» резкие скачки сигналов с пульта управления. Представьте, что сигнал от стиков — это ступеньки: без сглаживания каждое резкое движение стика приводит к резкому скачку в сигнале, что вызывает рывки в полёте и быстрый нагрев моторов. С сглаживанием эти переходы становятся плавнее, как если бы ступеньки превратились в пологий склон, из-за чего квад быстрее и аккуратнее реагирует на движения стиков.
-
Setpoint Cutoff Type (Тип фильтрации положения стика): Это настройка, которая автоматически подбирает, насколько "жёстко" или "мягко" будет сглаживаться сигнал от стика. Чем сильнее фильтр, тем мягче реакции на резкие движения. Автоматический режим подбирает частоту фильтра в зависимости от качества и частоты обновления сигнала с пульта.
-
Feedforward Cutoff Type (Тип фильтрации feedforward): Feedforward — это ускоренный отклик на движение стиков, который даёт ощущение живой и резкой реакции квадрокоптера. Здесь фильтр тоже сглаживает сигналы, чтобы дрон не дергался из-за мелких шумов. Автоматический режим подбирает фильтрацию так, чтобы сохранить баланс между плавностью и отзывчивостью.
-
Auto Factor (Автоматический коэффициент): Этот параметр регулирует, насколько быстро и резко фильтры меняют своё влияние. Высокое значение — фильтр становится менее жестким, реакции более резкие, но и шумов больше. Низкое значение — фильтры работают агрессивнее, делая управление более мягким и плавным.
В итоге RC Smoothing — это электронный способ сделать движение стиков более плавным и убрать мелкие помехи, чтобы дрон не дергался и моторы не перегревались от слишком резких команд. При этом важно подобрать баланс, чтобы управление оставалось отзывчивым и приятным.
Для чего это нужно?
RC Smoothing актуален для высокочастотных современных радиолинков (ExpressLRS, Crossfire и др.), особенно если хочется минимизировать микро-колебания каналов без потери остроты управления.
Настройки по умолчанию (Auto и Auto Factor = 30) подходят для большинства типовых FPV-сборок, помогают одновременно избежать шумов и сохранить резкий отклик стиков для фристайла, гонок, и точных манёвров.
Как работают приведенные в примере настройки?
-
Коптер принимает сигнал управления и телеметрию по протоколу CRSF через UART.
-
Подачи аналогового RSSI и отдельного канала RSSI не предусмотрено, поэтому для OSD будет использоваться встроенная телеметрия протокола.
-
Значения стиков определяются по стандартной сетке (1050, 1500, 1900), что важно для настройки failsafe, arming/disarming и режимов.
-
Smoothing и Zero deadband — поможет уменьшить влияние мелкого шума сигнала для максимально быстрого отклика (актуально для гонок).
-
Используемая раскладка каналов (TAER1234) подходит для большинства современных передатчиков (Jumper, RadioMaster, FrSky).
Первое, что нужно проверить, — верно ли у нас работают основные стики: roll, pitch, yaw и throttle. Если наугад понажимать кнопки и тумблеры на аппаратуре, то можно заметить, как меняются каналы (AUX) в заданном диапазоне в разделе Receiver. Если все хорошо работает, двигаемся дальше.
11: Режимы (Modes tab)
Теперь нам нужно активировать на нашем радиопередатчике функции для управления дроном с помощью тумблеров, кнопок и т.д. Раздел Modes для этого имеет множество режимов.
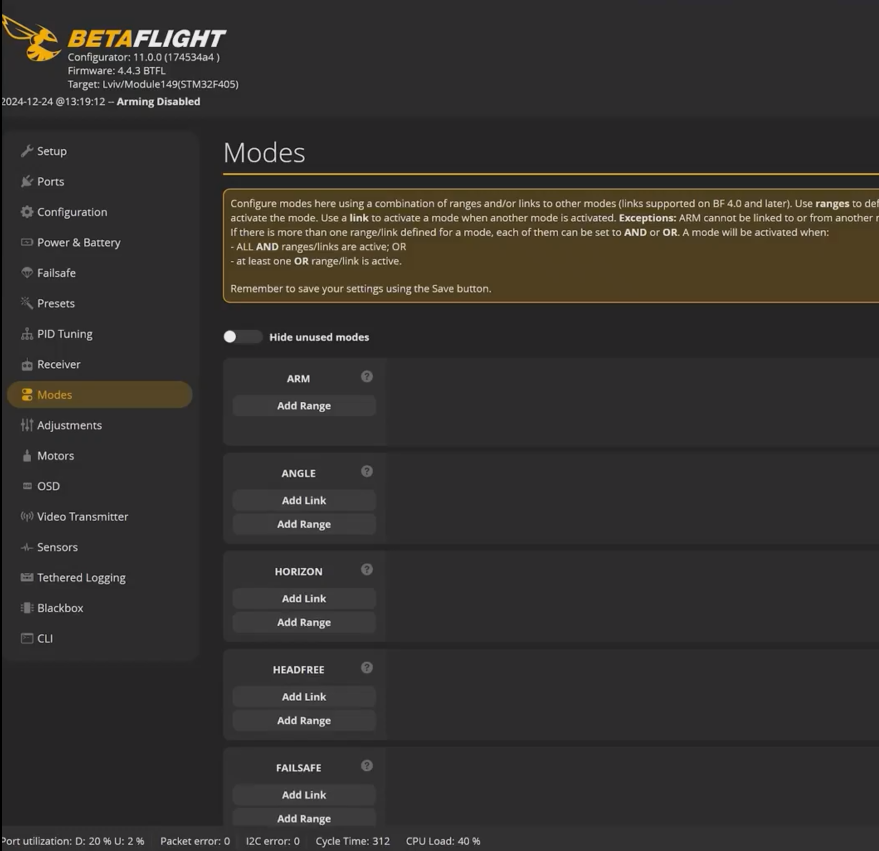
Теперь наша задача — назначить на них нужные нам функции. Для этого нужно выбрать любую кнопку или тумблер, который вы хотите использовать для главной функции — активации дрона (Arm/Disarm).
- Переходим в раздел Modes.
- Выбираем из списка нужный AUX-канал для функции ARM. Видим желтую шкалу. Она показывает диапазон, в котором будет активирована эта функция. Под ней есть маленькая желтая риска, которая показывает, в каком сейчас диапазоне находится ваш тумблер/кнопка.
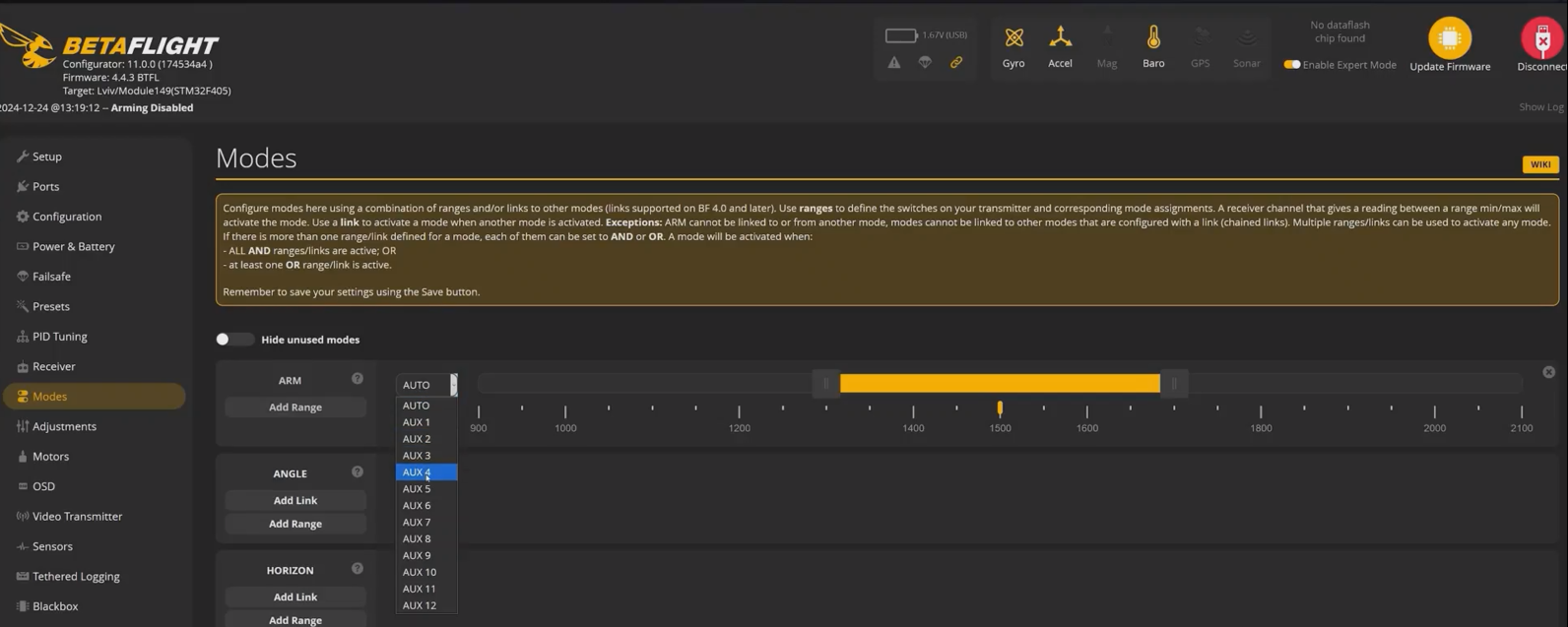
- Нужно перенести желтую шкалу в то место, где будет находиться желтая риска при активации функции. Когда желтая риска попадает в желтую шкалу, функция активируется.
- Таким же образом назначаются другие функции (Beeper, режимы полета Angle, Horizon, Acro и т.д.) на другие каналы.
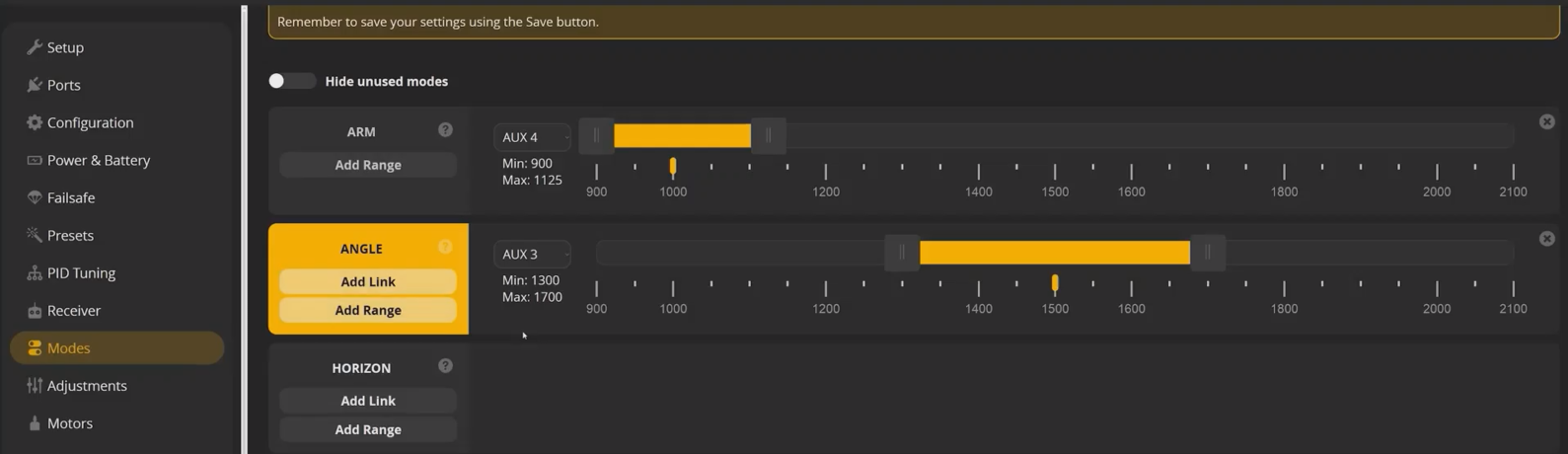
- Для трехпозиционного тумблера можно назначить три функции, растянув их шкалы на разные участки диапазона канала.
После настройки не забываем нажать Save.
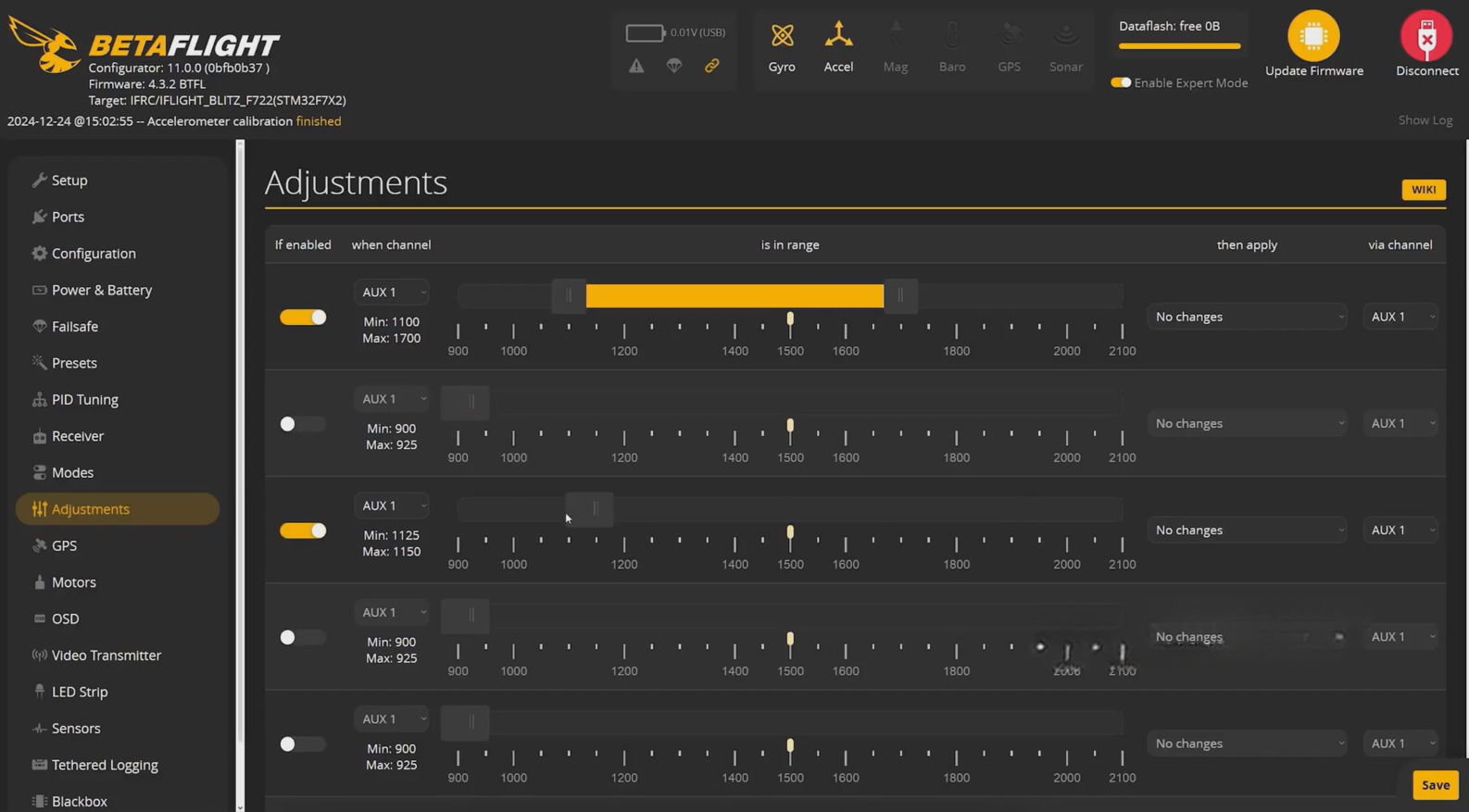
12: Adjustments
Вкладка Adjustments. ⇐ Подробно здесь.
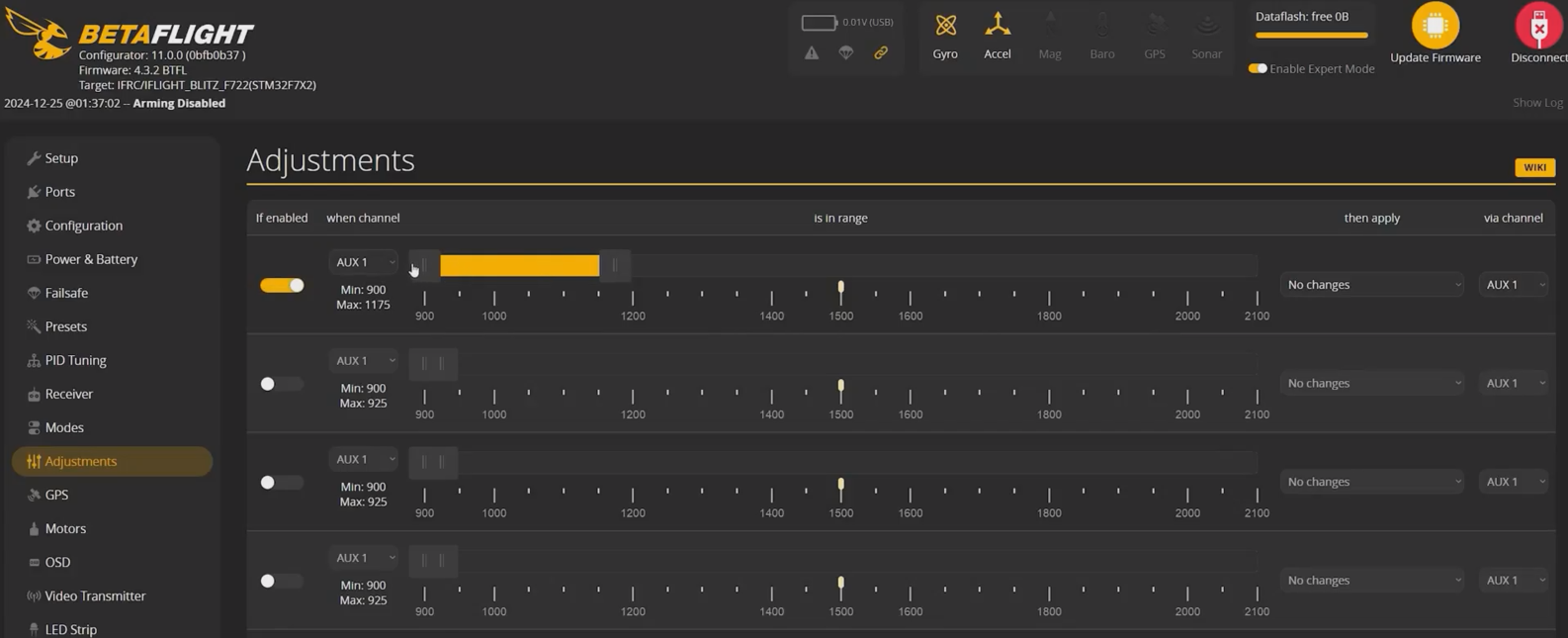
Вкладка Adjustments в Betaflight Configurator предназначена для настройки "на лету" (in-flight) корректировок параметров полетного контроллера с помощью переключателей или потенциометров на передатчике (TX) через дополнительные каналы (AUX). Это позволяет в процессе полета менять определённые параметры, не заходя в конфигуратор.
Основные функции вкладки Adjustments
-
Позволяет задать до 12 диапазонов (ranges) для корректировки различных настроек во время полёта.
-
Каждому диапазону назначается канал AUX с определённым интервалом значений (например, 900–1175).
-
Для каждого диапазона указывается функция корректировки и канал регулировки (обычно потенциометр или переключатель).
-
При попадании значения канала AUX в заданный диапазон активируется корректировка, которая изменяет параметр в зависимости от положения канала регулировки.
-
Используется команда CLI
adjrangeдля конфигурации диапазонов и функций. -
Поддерживаются два режима работы — абсолютный и инкрементный, где абсолютный устанавливает фиксированное значение, а инкрементный изменяет параметр относительно центрального значения.
Рекомендации и особенности
-
Изменения параметров во время полёта могут повлиять на стабильность и поведение коптера, поэтому следует экспериментировать на большой открытой площадке.
-
Обычно для регулировочных каналов рекомендуется использовать трёхпозиционные выключатели с возвратом в центральное положение для удобства работы.
-
Конфигурация должна учитываться в соответствии с значениями, которые передаются приёмником (900–2100).
-
Полезно настроить предупреждения на передатчике для переключателей, используемых в Adjustments.
Используется, например, для следующих регулировок:
-
Регулировка PID-параметров во время полёта для оперативного тюнинга.
-
Изменение фильтров, скорости вращения моторов или других параметров, требующих оперативной корректировки.
-
Управление яркостью светодиодной ленты или других периферийных устройств.
- пр.
Вкладка Adjustments - инструмент для динамического изменения настроек квадрокоптера через радиоуправление без необходимости подключаться к компьютеру и менять параметры в Betaflight Configurator вручную.
13: GPS
Подробно о вкладке GPS в Betaflight ⇒ GPS
Общая информация:
Эта вкладка позволяет настраивать и контролировать GPS-модуль, подключенный к вашему контроллеру полета. GPS используется для:
- Позиционирования: Определение текущего местоположения дрона (широта, долгота, высота).
- RTH (Return to Home): Автоматический возврат дрона в точку старта.
- GPS Rescue: Функция, позволяющая восстановить контроль над дроном при потере связи, используя GPS для навигации.
- Телеметрии: Передача данных о местоположении дрона на пульт управления или другое устройство.
Разделы вкладки GPS:
-
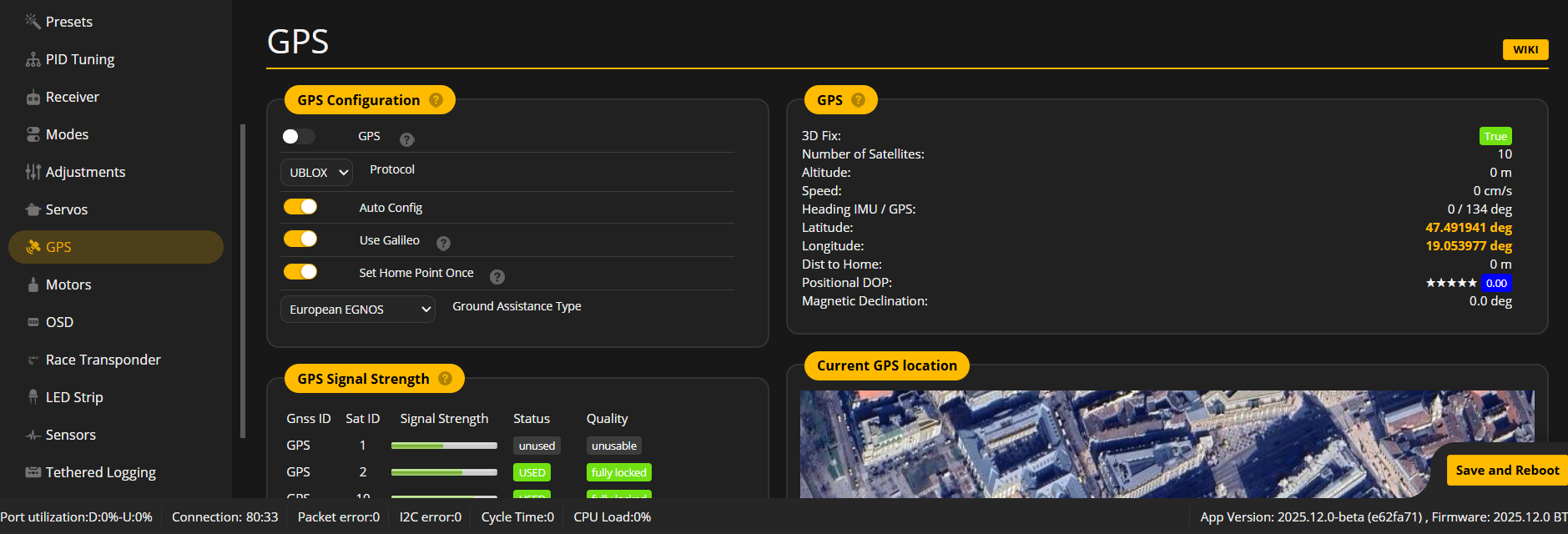
GPS Configuration (Конфигурация GPS):
- GPS (GPS) (Включено/Выключено): Включает или выключает использование GPS-модуля. Важно: Убедитесь, что этот переключатель включен, если вы хотите использовать GPS.
- Protocol (Протокол): Определяет протокол связи, используемый GPS-модулем.
- UBLOX: Наиболее распространенный протокол, используемый большинством GPS-модулей. Если вы используете модуль на базе UBLOX (что наиболее вероятно), оставьте это значение.
- Auto Config (Авто Конфиг - Автоматическая конфигурация): Включает автоматическую настройку GPS-модуля. В большинстве случаев лучше оставить это значение включенным, чтобы Betaflight автоматически определял параметры вашего GPS-модуля.
- Use Galileo (Использовать Galileo): Включает использование спутниковой системы навигации Galileo, в дополнение к GPS (США) и ГЛОНАСС (Россия). Если ваш модуль поддерживает Galileo, рекомендуется включить эту опцию для повышения точности позиционирования.
- Set Home Point Once (Установить точку “Дом” один раз): Если включено, точка “Дом” будет установлена только при первом получении GPS-фиксации. Если выключено, точка “Дом” будет обновляться каждый раз при включении коптера. Рекомендуется включить для получения более точной точки “Дом”.
- Ground Assistance Type (Тип наземной помощи): Этот выпадающий список позволяет выбрать систему коррекции координат, используемую для повышения точности.
- European EGNOS (Европейский EGNOS): Наиболее распространенный вариант для Европы. Выбирайте этот вариант, если вы находитесь в Европе.
-
GPS: (Информация о статусе GPS):
- 3D Fix (3D фикс): Показывает, получен ли 3D-фикс GPS. “True” (Истина) означает, что 3D-фикс получен. 3D фикс необходим для RTH и других функций, требующих точного позиционирования.
- Number of Satellites (Количество Спутников): Показывает количество спутников, используемых для определения местоположения. Чем больше спутников, тем выше точность. Обычно требуется не менее 6 спутников для надежного 3D-фикса.
- Altitude (Высота): Показывает текущую высоту дрона над уровнем моря.
- Speed (Скорость): Показывает текущую скорость дрона.
- Heading IMU / GPS (Курс IMU/GPS): Показывает направление, куда смотрит дрон, получаемое от IMU и GPS.
- Latitude (Широта): Показывает текущую широту дрона.
- Longitude (Долгота): Показывает текущую долготу дрона.
- Dist to Home (Расстояние до Дома): Показывает расстояние от дрона до точки “Дом” (места старта).
- Positional DOP (Позиционный DOP): Показывает значение DOP (Dilution of Precision), которое является мерой точности позиционирования. Чем ниже значение DOP, тем выше точность.
- Magnetic Declination (Магнитное склонение): Показывает разницу между истинным севером и магнитным севером. Это значение используется для компенсации отклонения компаса.
-
GPS Signal Strength (Мощность GPS сигнала):
- Gnss ID (Gnss ID): Идентификатор GPS.
- Sat ID (ID Спутника): Идентификатор отдельного спутника, который отслеживается GPS-модулем.
- Signal Strength (Мощность сигнала): Показывает мощность сигнала каждого спутника. Чем больше мощность сигнала, тем лучше.
- Status (Статус): Показывает, используется ли спутник. Например, “used” - используется, “unused” - не используется.
- Quality (Качество): Показывает качество сигнала спутника. Например, “fully locked” - полностью захвачен, “unusable” - непригодный.
-
Current GPS location (Текущее местоположение GPS):
- Показывает текущее местоположение дрона на карте. Отображается карта с текущей позицией.
Внизу вкладки:
- Save and Reboot (Сохранить и перезагрузить): Сохраняет все изменения, внесенные в конфигурацию GPS, и перезагружает контроллер полета. Не забудьте нажать эту кнопку после внесения изменений!
Важные замечания:
- Перед первым использованием: Убедитесь, что ваш GPS-модуль правильно подключен к контроллеру полета. Проверьте правильность пинов (TX и RX) и настройте соответствующий UART-порт в Betaflight.
- Получение GPS-фикса: GPS-модулю требуется некоторое время (обычно несколько минут) для получения 3D-фикса. Выйдите на открытое место, где нет препятствий (зданий, деревьев), чтобы ускорить процесс.
- Проверка работоспособности: После получения 3D-фикса проверьте правильность отображения местоположения на карте.
- Настройка RTH: Настройте параметры RTH в разделе “Failsafe” вкладки Betaflight.
14: Двигатели (Motors tab)
В этом разделе вы можете настроить и проверить работу двигателей вашего дрона. Этот раздел позволяет убедиться в правильности направления вращения двигателей, проверить работу каждого двигателя отдельно, а также выполнять калибровку ESC.
КРАЙНЕ ВАЖНО: Снимите пропеллеры перед выполнением любых действий на этой вкладке!
Общая информация:
Эта вкладка используется для настройки и тестирования моторов и ESC (Electronic Speed Controllers). Она позволяет:
- Проверить правильность направления вращения моторов.
- Откалибровать ESC.
- Настроить минимальный и максимальный уровни газа.
- Протестировать работу каждого мотора по отдельности.
Разделы вкладки “Motors” (Моторы):
-
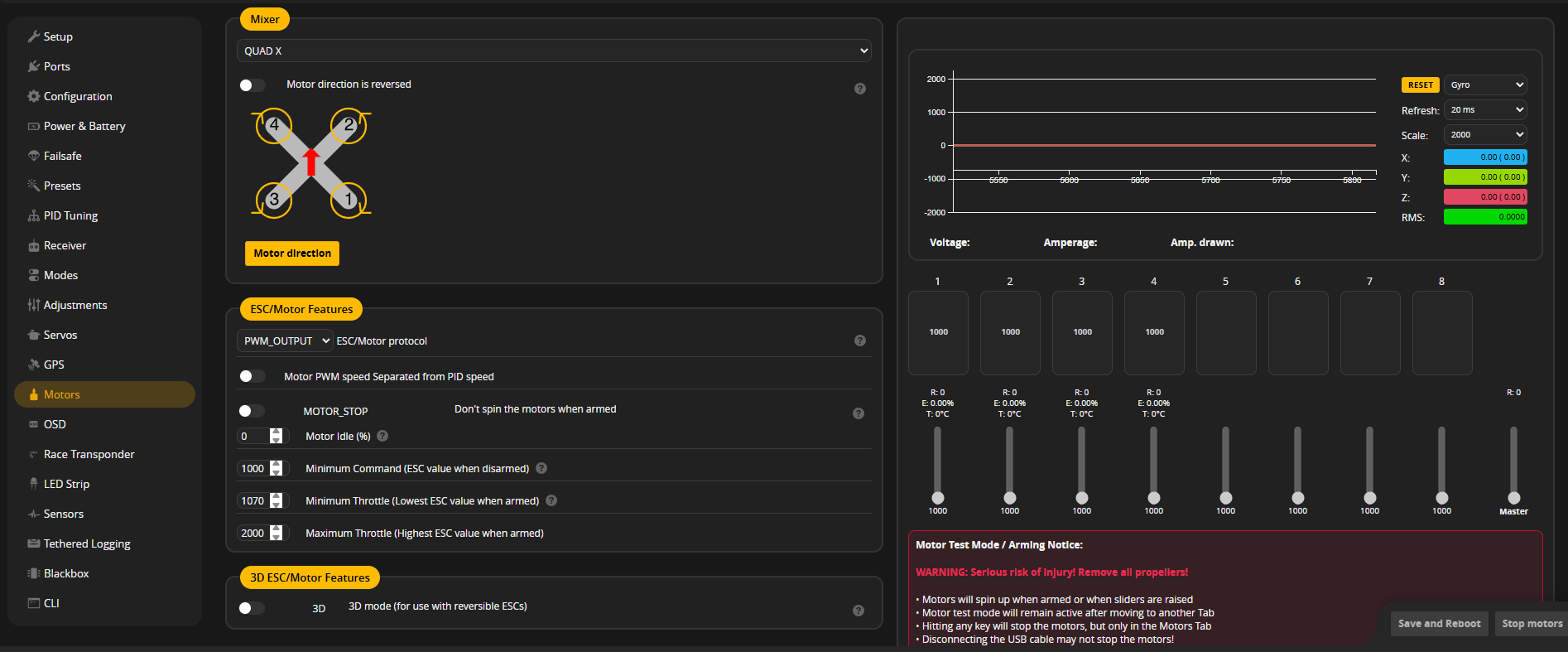
Mixer (Микшер):
- QUAD X: Показывает выбранную конфигурацию микшера. В примере, на скрине вкладки, выбрана конфигурация “QUAD X”, что означает, что у вас квадрокоптер с X-образной рамой.
- Motor direction is reversed (Обратное направление вращения моторов): Этот переключатель включает/выключает реверсирование направления вращения всех моторов. Обычно его не нужно включать. Используйте его, только если направление вращения всех моторов неверное, что бывает крайне редко.
- Схема направления вращения моторов: Схематическое изображение, показывающее, в каком направлении должен вращаться каждый мотор для выбранной конфигурации микшера. Обязательно проверьте это и убедитесь, что ваши моторы вращаются в правильном направлении. Моторы 1 и 2 вращаются по часовой стрелке, а моторы 3 и 4 - против часовой стрелки.
- Motor direction (Направление вращения моторов): Кнопка для просмотра/изменения направления вращения каждого мотора.
-
ESC/Motor Features (Настройки ESC/Моторов):
- PWM_OUTPUT (PWM выход): Позволяет выбрать режим вывода PWM.
- ESC/Motor protocol (Протокол ESC/Моторов): Определяет протокол связи, используемый между контроллером полета и ESC. Типичные варианты:
- DSHOT600: Рекомендуемый протокол для современных ESC.
- DSHOT300: Более медленный протокол DSHOT.
- ONESHOT125: Более старый аналоговый протокол.
- MULTISHOT: Еще один более старый аналоговый протокол. Выберите протокол, который поддерживается вашими ESC.
- Motor PWM speed Separated from PID speed (Скорость PWM мотора отделена от скорости PID): Обычно эта опция отключена. Если она включена, скорость PWM мотора не зависит от PID-регулятора, что может привести к нестабильному полету.
- MOTOR_STOP (MOTOR_STOP): Этот переключатель определяет, будут ли моторы вращаться на холостом ходу, когда дрон активирован (armed), но не получает команды газа.
- Включено (переключатель справа): Моторы не будут вращаться, пока не будет дан газ.
- Выключено (переключатель слева): Моторы будут вращаться на минимальном уровне газа, когда дрон активирован.
- Motor Idle (%) (Холостой ход мотора (%)): Определяет минимальный уровень газа, на котором будут вращаться моторы, когда дрон активирован (если MOTOR_STOP выключен). Значение 0 означает, что моторы не будут вращаться, пока не будет дан газ.
- Minimum Command (ESC value when disarmed) (Минимальная команда (значение ESC, когда дрон деактивирован)): Этот параметр устанавливает значение PWM, которое отправляется на ESC, когда дрон деактивирован (disarmed). Значение по умолчанию 1000.
- Minimum Throttle (Lowest ESC value when armed) (Минимальный газ (минимальное значение ESC, когда дрон активирован)): Этот параметр устанавливает значение PWM, которое отправляется на ESC, когда дрон активирован (armed), но не получает команды газа (если MOTOR_STOP выключен). Обычно его устанавливают чуть выше значения Minimum Command.
- Maximum Throttle (Highest ESC value when armed) (Максимальный газ (максимальное значение ESC, когда дрон активирован)): Этот параметр устанавливает максимальное значение PWM, которое отправляется на ESC. Значение по умолчанию 2000.
-
3D ESC/Motor Features (3D Настройки ESC/Моторов):
- 3D (3D): Включает режим 3D, который позволяет моторам вращаться в обоих направлениях. Предназначен для использования со специальными ESC, поддерживающими режим 3D. Обычно не используется.
-
Визуализация Gyro (Гироскопа), Voltage (Напряжения), Amperage (Силы тока) и Amp. drawn (потребляемого тока):
- График: Отображает данные с гироскопа (X, Y, Z оси), напряжения, силы тока и потребляемого тока. Это полезно для диагностики проблем с вибрацией или проблемами с питанием.
- Reset (Сброс): Сбрасывает график.
- Refresh (Обновить): Устанавливает частоту обновления графика.
- Scale (Масштаб): Устанавливает масштаб графика.
- X, Y, Z: Показания гироскопа по осям.
- RMS: Среднеквадратичное значение.
- Voltage (Напряжение): Отображает напряжение батареи.
- Amperage (Сила тока): Отображает силу тока.
- Amp. drawn (Потребляемый ток): Отображает потребляемый ток каждым двигателем.
-
Motor Test Mode / Arming Notice (Режим Тестирования Моторов / Предупреждение об Арминге):
- Слайдеры для управления моторами: Эти слайдеры позволяют управлять каждым мотором по отдельности. ВНИМАНИЕ: Снимите пропеллеры! Перемещение слайдера вверх приведет к увеличению скорости соответствующего мотора. Убедитесь, что моторы вращаются в правильном направлении.
- Master: Слайдер для одновременного управления всеми моторами.
- Важные предупреждения: Напоминают о необходимости снятия пропеллеров и о рисках, связанных с вращением моторов.
Внизу вкладки:
- Save and Reboot (Сохранить и Перезагрузить): Сохраняет все изменения, внесенные в конфигурацию, и перезагружает контроллер полета. Не забудьте нажать эту кнопку после внесения изменений!
- Stop motors (Остановить моторы): принудительная остановка всех моторов.
Важные шаги и рекомендации:
- Безопасность прежде всего: Снимите пропеллеры!
- Проверка направления вращения моторов:
- Подключите батарею.
- Перейдите на вкладку “Motors” (Моторы).
- Включите переключатель “I understand the risks” (Я понимаю риски).
- Осторожно переместите слайдер для каждого мотора понемногу, чтобы убедиться, что моторы вращаются в правильном направлении, как указано на схеме.
- Если мотор вращается в неправильном направлении, вам нужно поменять местами любые два из трех проводов, идущих от ESC к мотору.
- Калибровка ESC (если используются аналоговые протоколы, такие как OneShot125 или MultiShot):
- Переключитесь на протокол OneShot125 или MultiShot.
- Поднимите все слайдеры моторов до максимума (2000).
- Подключите батарею. ESC издадут серию звуковых сигналов.
- Опустите все слайдеры до минимума (1000). ESC издадут еще одну серию звуковых сигналов.
- Перезагрузите контроллер полета.
- Вернитесь к протоколу DSHOT600 (или к тому, который используется).
- Настройка параметров газа (Minimum Command, Minimum Throttle, Maximum Throttle):
- Экспериментируйте с этими параметрами, чтобы добиться желаемого поведения моторов на холостом ходу и при полном газе. Обычно значения по умолчанию подходят для большинства конфигураций.
Предупреждения:
- Не подключайте пропеллеры во время работы на этой вкладке! Вращающиеся моторы могут нанести серьезные травмы.
- Будьте осторожны при перемещении слайдеров моторов. Моторы могут вращаться очень быстро.
- Не устанавливайте слишком низкое значение “Minimum Throttle”, чтобы моторы не останавливались в полете.
- Не устанавливайте слишком высокое значение “Maximum Throttle”, чтобы не повредить моторы или ESC.
15: OSD (On-Screen Display)
OSD (On-Screen Display) позволяет отображать важную телеметрическую информацию поверх видеопотока с вашей камеры. Это помогает вам оставаться в курсе состояния дрона и принимать обоснованные решения во время полета. Раздел “Elements” отвечает за выбор этих самых элементов.
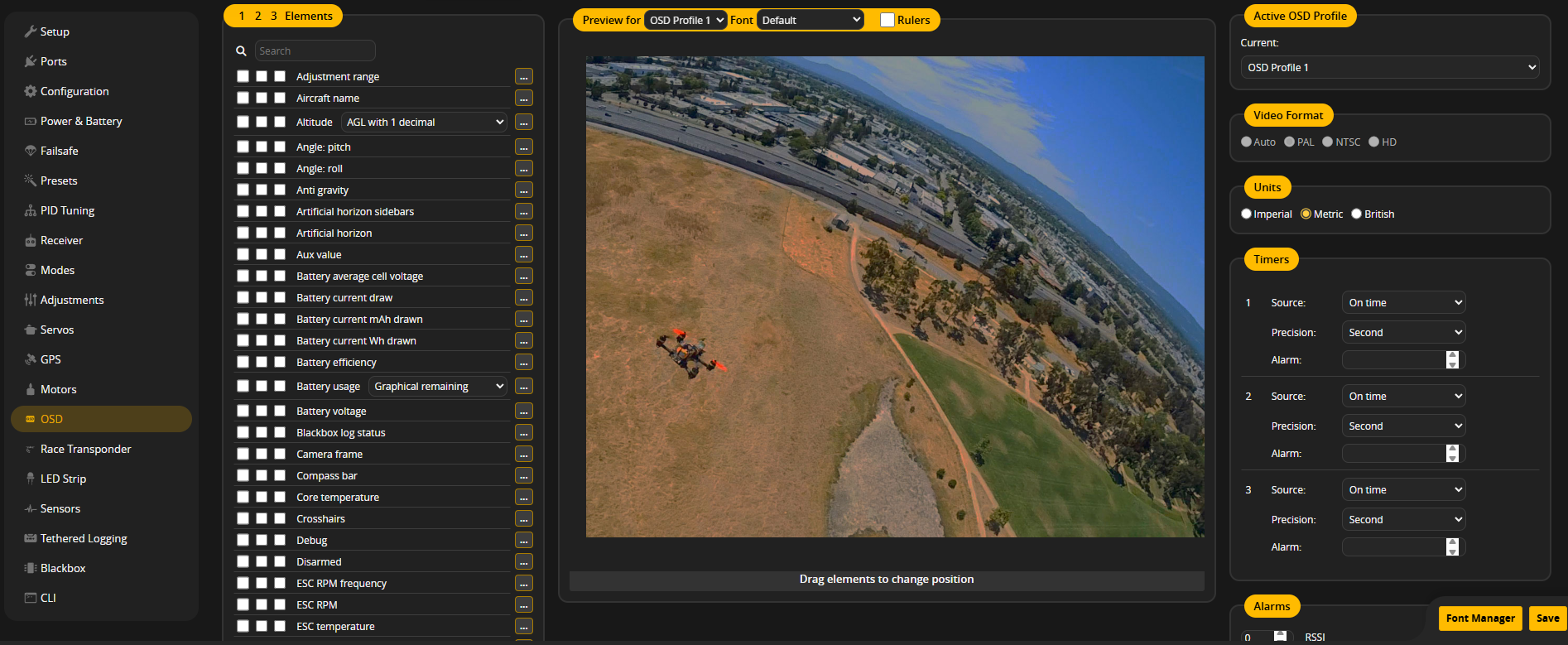
Elements
Раздел Elements (Элементы) в Betaflight. Эта вкладка является ключевой для настройки того, какая информация будет отображаться на вашем экране FPV (First-Person View) во время полета.
Раздел “Elements” (Элементы):
Основная функция этого раздела - выбор и добавление элементов (данных) для отображения на экране OSD. Каждый элемент соответствует определенной информации, такой как напряжение батареи, скорость, высота и т.д.
Основные компоненты раздела:
-
Список элементов: Большой список с флажками слева от каждого элемента. Установка флажка включает отображение этого элемента на экране OSD. Снятие флажка скрывает элемент.
-
Search (Поиск): Поле поиска в верхней части списка. Используйте его, чтобы быстро найти нужный элемент по названию. Это особенно полезно, так как список элементов достаточно длинный.
-
“…” (многоточие) справа от каждого элемента: Кнопка настроек для каждого элемента. Нажатие на нее открывает всплывающее окно с дополнительными настройками для этого элемента. Эти настройки могут включать:
- Позицию: Перемещение элемента на экране OSD.
- Размер: Изменение размера элемента.
- Единицы измерения: Выбор единиц измерения (например, метры или футы для высоты).
- Формат: Выбор формата отображения данных (например, количество десятичных знаков).
- Цвет: Выбор цвета текста.
- Предупреждения: Настройка пороговых значений для отображения предупреждений (например, предупреждение о низком напряжении батареи).
Описание основных элементов OSD:
Вот краткое описание наиболее распространенных и полезных элементов OSD (в алфавитном порядке):
- Adjustment range (Диапазон регулировки): Отображает текущий диапазон регулировки, используемый для VTX (видеопередатчика) или других регулируемых параметров.
- Aircraft name (Имя дрона): Отображает имя вашего дрона, которое можно задать в конфигурации.
- Altitude (Высота): Отображает текущую высоту дрона. Обратите внимание на доступные варианты:
- AGL (Above Ground Level): Высота над уровнем земли.
- MSL (Mean Sea Level): Высота над уровнем моря.
- Angle: pitch (Угол: тангаж): Отображает угол тангажа дрона (угол наклона вперед/назад).
- Angle: roll (Угол: крен): Отображает угол крена дрона (угол наклона влево/вправо).
- Anti gravity (Антигравитация): Отображает состояние функции антигравитации (включена/выключена).
- Artificial horizon (Искусственный горизонт): Отображает графическое представление горизонта, показывающее ориентацию дрона.
- Artificial horizon sidebars (Боковые панели искусственного горизонта): Отображает боковые панели на искусственном горизонте, которые показывают углы крена и тангажа.
- Aux value (Вспомогательное значение): Отображает значение AUX-канала.
- Battery average cell voltage (Среднее напряжение ячейки батареи): Отображает среднее напряжение одной ячейки батареи. Это самый надежный способ мониторинга состояния батареи.
- Battery current draw (Потребляемый ток батареи): Отображает текущий ток, потребляемый батареей.
- Battery current mAh drawn (Потребленный mAh батареи): Отображает количество mAh (миллиампер-часов), потребленных батареей.
- Battery current Wh drawn (Потребленный Wh батареи): Отображает количество Wh (Ватт-часов), потребленных батареей.
- Battery efficiency (Эффективность батареи): Отображает эффективность батареи.
- Battery usage (Использование батареи): Отображает графическое представление использования батареи (например, оставшийся заряд).
- Battery voltage (Напряжение батареи): Отображает общее напряжение батареи.
- Blackbox log status (Статус записи Blackbox): Отображает статус записи данных Blackbox.
- Camera frame (Рамка камеры): Отображает рамку вокруг экрана, обозначающую видимую область камеры.
- Compass bar (Компас): Отображает компас.
- Core temperature (Температура ядра): Отображает температуру процессора контроллера полета.
- Crosshairs (Прицел): Отображает перекрестие в центре экрана для облегчения прицеливания.
- Debug (Отладка): Отображает отладочную информацию (обычно используется разработчиками).
- Disarmed (деактивирован): Отображает надпись “DISARMED”, когда дрон деактивирован.
- ESC RPM frequency (Частота оборотов ESC): Отображает частоту вращения моторов, сообщаемую ESC.
- ESC RPM (Обороты ESC): Отображает обороты моторов, сообщаемые ESC.
- ESC temperature (Температура ESC): Отображает температуру ESC.
- Flight distance (Дистанция полета): Отображает пройденное расстояние.
- Flip after crash arrow (Стрелка переворота после аварии): Отображает стрелку, указывающую направление для переворота дрона после аварии (если функция переворота включена).
- Fly mode (Режим полета): Отображает текущий режим полета (например, Angle, Horizon, Acro).
- G force (Перегрузка): Отображает текущую перегрузку, испытываемую дроном.
- Goggle DVR status (Статус DVR очков): Отображает статус записи видео в DVR очков.
- Goggle fan speed (Скорость вентилятора очков): Отображает скорость вращения вентилятора в очках.
- Goggle link quality (Качество связи очков): Отображает качество связи между очками и дроном.
- Goggle system warnings (Системные предупреждения очков): Отображает предупреждения от очков.
- Goggle voltage (Напряжение очков): Отображает напряжение батареи очков.
- GPS latitude (Широта GPS): Отображает текущую широту дрона.
- GPS longitude (Долгота GPS): Отображает текущую долготу дрона.
- GPS sats (Спутники GPS): Отображает количество спутников GPS, используемых для определения местоположения.
- GPS speed (Скорость GPS): Отображает текущую скорость дрона, измеренную с помощью GPS.
- Home direction (Направление на дом): Отображает стрелку, указывающую направление на точку “Дом” (место старта).
- Home distance (Расстояние до дома): Отображает расстояние от дрона до точки “Дом”.
- Link quality (Качество связи): Отображает качество связи между приемником и передатчиком.
- Motor diagnostics (Диагностика моторов): Отображает диагностическую информацию о моторах.
- Numerical heading (Числовой курс): Отображает числовое значение курса дрона.
- Numerical vario (Числовой вариометр): Отображает скорость набора высоты/снижения.
- PID pitch (PID тангажа): Отображает значение PID для оси тангажа.
- PID roll (PID крена): Отображает значение PID для оси крена.
- PID yaw (PID рысканья): Отображает значение PID для оси рысканья.
- Pilot name (Имя пилота): Отображает имя пилота, которое можно задать в конфигурации.
- Power (Мощность): Отображает текущую потребляемую мощность.
- Profile: OSD profile name (Профиль: имя профиля OSD): Отображает имя текущего профиля OSD.
- Profile: PID and rate (Профиль: PID и скорость): Отображает имя текущего профиля PID и скорости.
- Profile: PID profile name (Профиль: имя профиля PID): Отображает имя текущего профиля PID.
- Profile: rate profile name (Профиль: имя профиля скорости): Отображает имя текущего профиля скорости.
- RC Channels (Каналы RC): Отображает значения каналов радиоуправления.
- Ready Mode (Режим готовности): Отображает состояние режима готовности.
- RSNR value (Значение RSNR): Отображает значение отношения сигнал/шум приемника (RSNR).
- RSSI dBm value (Значение RSSI dBm): Отображает уровень сигнала приемника в децибелах-милливаттах (dBm).
- RSSI value (Значение RSSI): Отображает уровень сигнала приемника (RSSI).
- RTC date and time (Дата и время RTC): Отображает текущую дату и время, полученные от RTC (часы реального времени).
- Stick overlay left (Наложение стиков слева): Отображает графическое представление положения левого стика радиоуправления.
- Stick overlay right (Наложение стиков справа): Отображает графическое представление положения правого стика радиоуправления.
- Throttle position (Положение газа): Отображает текущее положение стика газа.
- Timer 1 (Таймер 1): Отображает текущее время, прошедшее с момента старта (или включения таймера).
- Timer 2 (Таймер 2): Отображает текущее время, прошедшее с момента старта (или включения таймера).
- Timer: remaining time estimate (Таймер: оценка оставшегося времени): Отображает оценку оставшегося времени полета на основе текущего потребления батареи.
- Total flights (Всего полетов): Отображает общее количество полетов, зарегистрированных контроллером полета.
- Tx uplink power (Мощность восходящей линии связи Tx): Отображает мощность восходящей линии связи Tx.
- Up (Pitch 90 deg)/Down (Pitch -90 deg) Reference (Вверх (Тангаж 90 град.)/Вниз (Тангаж -90 град.) Ориентир): Отображает индикатор направления вверх (тангаж 90 град.) и вниз (тангаж -90 град.).
- VTX bitrate (Битрейт VTX): Отображает битрейт видеопередатчика (VTX).
- VTX channel (Канал VTX): Отображает текущий канал видеопередатчика (VTX). Обычно показывается как Band:Channel:Power (Диапазон:Канал:Мощность).
- VTX delay (Задержка VTX): Отображает задержку видеопередатчика (VTX).
- VTX distance (Расстояние VTX): Отображает расстояние между дроном и базовой станцией VTX.
- VTX DVR status (Статус DVR VTX): Отображает статус записи видео в DVR видеопередатчика (VTX).
- VTX temperature (Температура VTX): Отображает температуру видеопередатчика (VTX).
- VTX voltage (Напряжение VTX): Отображает напряжение питания видеопередатчика (VTX).
- Warnings (Предупреждения): Отображает различные предупреждения, такие как “Low Battery” (Низкий заряд батареи), “Failsafe” (Безопасный режим) и т.д.
Общие советы:
- Начните с малого: Не перегружайте OSD слишком большим количеством информации. Начните с отображения только самых важных данных (например, напряжение батареи, таймер, режим полета).
- Экспериментируйте: Попробуйте разные элементы и расположения, чтобы найти оптимальную конфигурацию для ваших нужд.
- Будьте внимательны к предупреждениям: Обязательно включите отображение предупреждений, чтобы вовремя среагировать на возможные проблемы.
- Подумайте о размере: Выбирайте элементы и настраивайте их размер так, чтобы они были легко читаемы, но не загромождали экран.
- Сохраняйте свои настройки: Не забудьте сохранить конфигурацию OSD после внесения изменений.
Preview For
Общая информация:
Этот раздел вкладки OSD является интерактивным визуальным редактором, который позволяет вам видеть, как выбранные вами элементы OSD (из раздела “Elements”) будут выглядеть на экране FPV и перемещать их для оптимального расположения.
Элементы управления в верхней части:
-
Preview for (Предварительный просмотр для):
- OSD Profile 1 (Профиль OSD 1): Это выпадающее меню позволяет вам выбрать, какой профиль OSD вы хотите просмотреть и отредактировать. Betaflight поддерживает несколько профилей OSD, что позволяет вам иметь разные настройки OSD для разных стилей полета, дронов или условий (например, один профиль для гонок, другой для фристайла). Выберите профиль, который вы хотите настроить.
-
Font (Шрифт):
- Default (По умолчанию): Это выпадающее меню позволяет выбрать шрифт, который будет использоваться для отображения элементов OSD.
- Default: Стандартный шрифт Betaflight.
- Custom (Пользовательский): Позволяет загрузить пользовательский шрифт, если это необходимо. Иногда это используется для поддержки специальных символов или для придания уникального вида OSD.
- Default (По умолчанию): Это выпадающее меню позволяет выбрать шрифт, который будет использоваться для отображения элементов OSD.
-
Rulers (Линейки):
- Флажок “Rulers” (Линейки): Включение этого флажка отображает сетку или линейки на фоне предварительного просмотра OSD. Это очень полезно для точного выравнивания элементов и обеспечения их симметричного расположения.
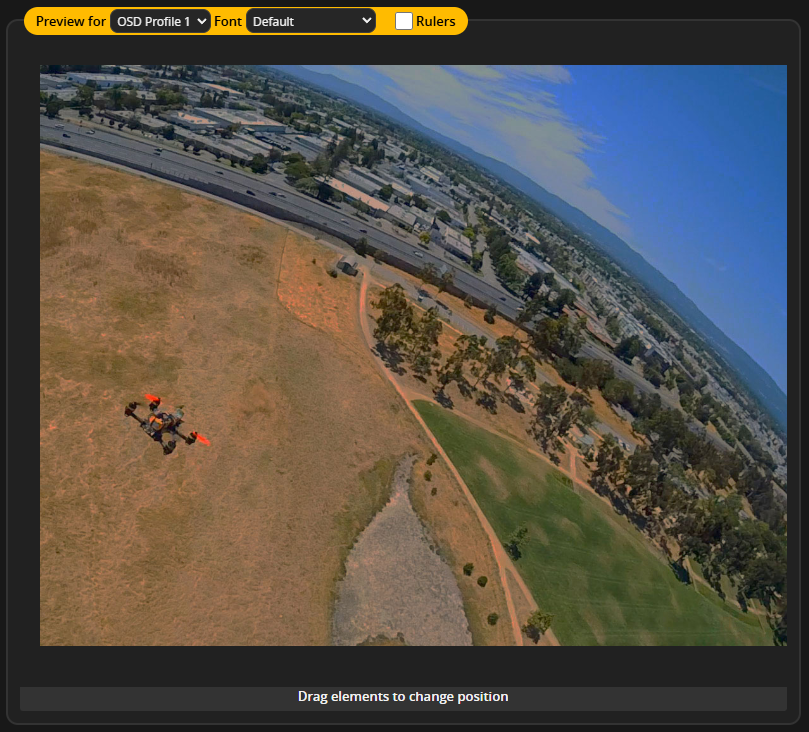
Основная область предварительного просмотра:
- Фоновое изображение: В этой области отображается статичное изображение (или, в некоторых версиях, видеопоток с камеры, если дрон подключен и камера работает) с наложенными на него выбранными элементами OSD. На изображении мы видим дрон, летящий над полем.
- Элементы OSD: Все элементы, которые вы выбрали для отображения в разделе “Elements” (который мы обсуждали ранее), появятся здесь. На изображении, хотя элементы и не видны (возможно, они еще не выбраны или находятся за пределами видимой области), вы увидите их, как только выберете их в списке.
- Интерактивность: Это не просто картинка. Вы можете перетаскивать элементы мышью по экрану, чтобы изменить их положение.
Панель внизу:
- “Drag elements to change position” (Перетащите элементы, чтобы изменить позицию): Это текстовое сообщение подтверждает, что вы находитесь в режиме редактирования и можете перемещать элементы OSD простым перетаскиванием.
Как использовать этот раздел для настройки OSD:
- Выберите Профиль OSD: Определите, какой профиль вы хотите настроить (например, “OSD Profile 1”).
- Выберите Элементы: Перейдите к списку “Elements” (на соседней вкладке или в том же разделе, в зависимости от версии Betaflight) и отметьте флажками все данные, которые вы хотите видеть на экране.
- Вернитесь к предварительному просмотру: Теперь все выбранные элементы должны появиться на фоновом изображении.
- Включите Линейки (Rulers): Для более точного позиционирования включите флажок “Rulers”.
- Переместите элементы: Нажмите и перетащите каждый элемент мышью в желаемое место на экране. Старайтесь разместить важную информацию (например, напряжение батареи) там, где ее будет легко увидеть, но она не будет мешать обзору.
- Настройте шрифт (при необходимости): Выберите шрифт, который вам нравится и который хорошо читается.
- Сохраните изменения: После завершения настройки, обязательно нажмите кнопку “Save” (или “Save and Reboot”) внизу, чтобы сохранить изменения в контроллере полета.
Важные советы:
- Баланс информации и обзора: Не перегружайте OSD. Избыток информации может отвлекать и мешать обзору. Выбирайте только то, что действительно важно для вашего стиля полета.
- Тестирование в реальных условиях: Идеальная настройка OSD достигается путем тестирования в реальных условиях полета. То, что выглядит хорошо на экране компьютера, может быть неудобно в полете.
- Профили для разных нужд: Используйте разные профили OSD для разных сценариев (например, один для гонок с минимумом данных, другой для дальнобойных полетов с полной телеметрией).
Этот раздел является интуитивно понятным и мощным инструментом для персонализации вашего FPV-опыта.
Active OSD Profile / Video Format / Units
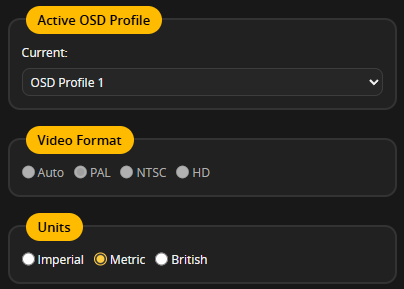
1. Active OSD Profile (Активный профиль OSD):
- Current (Текущий): Это выпадающее меню определяет, какой профиль OSD в данный момент активен и используется для отображения информации на вашем FPV-экране.
- OSD Profile 1 (Профиль OSD 1): В данном примере выбран “OSD Profile 1”. Вы можете иметь несколько профилей с разными настройками OSD (например, разные наборы отображаемых элементов и их расположение). Это позволяет вам быстро переключаться между разными конфигурациями OSD в зависимости от ваших потребностей. Если у вас есть несколько профилей, выберите тот, который вы хотите использовать.
2. Video Format (Видео формат):
- Эта секция позволяет вам выбрать видеоформат, используемый для OSD. Правильный выбор важен для совместимости с вашими FPV-очками или монитором.
- Auto (Автоматически): Betaflight пытается автоматически определить правильный формат. Это обычно лучший вариант.
- PAL (PAL): Формат, используемый в основном в Европе и некоторых других частях мира.
- NTSC (NTSC): Формат, используемый в основном в Северной Америке и Японии.
- HD (High Definition - Высокое разрешение): Если ваш видеопередатчик и FPV-очки поддерживают HD-разрешение OSD, вы можете выбрать этот вариант. Это обычно используется с цифровыми FPV-системами, такими как DJI Digital FPV System или HDZero.
3. Units (Единицы измерения):
- Эта секция позволяет вам выбрать, какие единицы измерения будут использоваться для отображения телеметрической информации в OSD (например, высота, скорость, расстояние).
- Imperial (Имперские): Использует имперские единицы измерения (футы, мили и т.д.).
- Metric (Метрические): Использует метрические единицы измерения (метры, километры и т.д.). Рекомендуется для большинства пользователей.
- British (Британские): Использует смесь имперских и метрических единиц.
Как использовать эти настройки:
- Active OSD Profile (Активный профиль OSD):
- Если у вас есть только один профиль, просто убедитесь, что он выбран.
- Если у вас есть несколько профилей, выберите тот, который вы хотите использовать для текущего полета.
- Video Format (Видео формат):
- Начните с выбора “Auto”. Если у вас возникнут проблемы с отображением OSD (например, изображение будет нестабильным или искаженным), попробуйте вручную выбрать “PAL” или “NTSC” в зависимости от того, какой формат поддерживает ваше FPV-оборудование.
- Если вы используете HD FPV, выберите “HD”.
- Units (Единицы измерения):
- Выберите “Metric” (Метрические), если вы предпочитаете метрическую систему.
- Выберите “Imperial” (Имперские), если вы предпочитаете имперскую систему.
Важные замечания:
- После внесения изменений нажмите кнопку “Save” (Сохранить) или “Save and Reboot” (Сохранить и Перезагрузить) внизу экрана, чтобы изменения вступили в силу.
- Неправильный выбор видеоформата может привести к проблемам с отображением OSD, поэтому убедитесь, что выбран правильный формат.
- Большинство пользователей предпочитают метрическую систему, так как она более распространена и удобна в использовании.
- При использовании цифровых FPV-систем (например, DJI) вы обычно выбираете “HD” для видеоформата, чтобы использовать OSD в высоком разрешении.
Эти настройки относительно простые, но важные для обеспечения правильного отображения OSD и удобства использования.
Timers
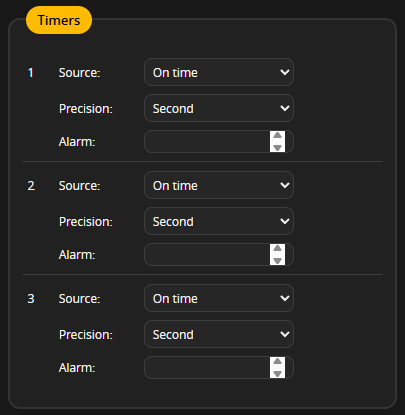
Таймеры OSD полезны для контроля времени полета, времени выполнения определенных задач (например, тренировочных упражнений) или для отслеживания любых других временных интервалов, связанных с вашим полетом.
Структура раздела “Timers” (Таймеры):
В разделе “Timers” представлено три отдельных блока настроек, каждый из которых соответствует своему таймеру (Timer 1, Timer 2, Timer 3). Каждый таймер имеет следующие параметры:
-
Source (Источник):
- Это выпадающее меню определяет, что именно запускает таймер и как он работает. Доступные варианты могут включать:
- On time (Включен): Таймер начинает отсчет, как только вы включите дрон, т.е. подключите батарею.
- Armed (активирован): Таймер начинает отсчет, как только дрон переходит в состояние “активирован” (armed). Это наиболее распространенный и полезный вариант, так как он отслеживает фактическое время полета.
- Throttle (Газ): Таймер начинает отсчет, когда значение газа выше определенного порога.
- Custom AUX (Пользовательский AUX): Таймер управляется назначенным AUX-каналом на вашем передатчике. Это позволяет вам запускать и останавливать таймер по своему усмотрению с помощью переключателя.
- Это выпадающее меню определяет, что именно запускает таймер и как он работает. Доступные варианты могут включать:
-
Precision (Точность):
- Это выпадающее меню определяет точность отображения таймера.
- Second (Секунда): Отображает время с точностью до секунды (например, 1:23).
- Millisecond (Миллисекунда): Отображает время с точностью до миллисекунды (например, 1:23.456). Обычно не требуется для обычного использования.
- Это выпадающее меню определяет точность отображения таймера.
-
Alarm (Будильник):
- Это поле позволяет установить значение времени (в минутах), по достижении которого будет срабатывать звуковой сигнал или отображаться предупреждение на экране OSD. Чтобы настроить, используйте стрелки вверх/вниз.
- Оставьте поле пустым, если вам не нужен будильник.
Как использовать раздел “Timers” (Таймеры):
- Выберите Источник (Source) для каждого таймера: Решите, что должно запускать каждый таймер. Для большинства пилотов полезно использовать “Armed” (активирован) для одного из таймеров, чтобы отслеживать общее время полета.
- Установите Точность (Precision): Выберите точность отображения времени. “Second” (Секунда) обычно достаточно.
- Настройте Будильник (Alarm) (при необходимости): Если вы хотите получить предупреждение по истечении определенного времени, установите значение в минутах.
- Отобразите таймеры в OSD: Перейдите на вкладку OSD, раздел “Elements” (Элементы) и выберите элементы “Timer 1”, “Timer 2” и “Timer 3” (если вы настроили более одного таймера), чтобы они отображались на вашем экране FPV.
- Протестируйте: Подключите батарею, “вооружите” дрон (если вы выбрали “Armed” в качестве источника) и убедитесь, что таймеры работают правильно.
Примеры использования:
- Timer 1: Source = Armed, Precision = Second: Отслеживает общее время полета для контроля заряда батареи.
- Timer 2: Source = Custom AUX, Precision = Second, Alarm = 5: Используется для отслеживания времени выполнения тренировочного упражнения, запускаемого и останавливаемого переключателем на передатчике, с предупреждением через 5 минут.
- Timer 3: Source = On time, Precision = Second: Отслеживает общее время, прошедшее с момента включения дрона.
Важные советы:
- Настройте параметры таймеров в соответствии с вашими конкретными потребностями.
- Убедитесь, что элементы “Timer 1”, “Timer 2” и “Timer 3” выбраны для отображения на экране OSD.
- Используйте будильник, чтобы предотвратить переразряд батареи или перелет за пределы безопасной зоны.
Этот раздел относительно прост, но очень полезен для контроля времени во время полета.
Alarms
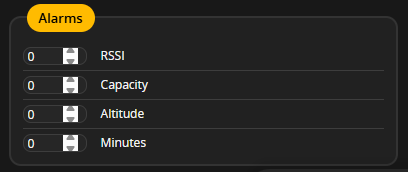
Раздел позволяет настроить пороговые значения, при достижении которых будут отображаться предупреждения на экране FPV, помогая предотвратить аварии и повреждения оборудования.
Общая информация:
Предупреждения OSD - это критически важный инструмент для безопасного полета. Они позволяют вам отслеживать важные параметры и получать оповещения, когда они выходят за пределы безопасных значений.
Структура раздела “Alarms” (Предупреждения):
Раздел “Alarms” (Предупреждения) содержит несколько настраиваемых пороговых значений для различных параметров:
-
RSSI (RSSI):
- Этот параметр устанавливает пороговое значение RSSI (Received Signal Strength Indicator - индикатор уровня принимаемого сигнала). RSSI показывает силу сигнала между вашим передатчиком и приемником на дроне.
- Если значение RSSI опускается ниже установленного порога, на экране OSD будет отображаться предупреждение (обычно мигающий текст или значок).
- Чем ниже число, тем сильнее должен упасть сигнал, чтобы сработало предупреждение. Например, если вы установите значение “30”, предупреждение сработает, когда RSSI станет ниже 30.
- Важно: Правильное значение зависит от вашего оборудования и условий полета. Протестируйте дальность полета и установите значение, обеспечивающее достаточно времени для возврата в безопасную зону при падении сигнала.
- Если у вас нет RSSI на OSD, этот параметр бесполезен.
-
Capacity (Емкость):
- Этот параметр устанавливает пороговое значение для оставшейся емкости батареи.
- Если количество потребленных mAh (миллиампер-часов) превысит установленное значение, на экране OSD будет отображаться предупреждение.
- Установите значение, соответствующее безопасному уровню разряда вашей батареи. Например, если у вас батарея 1300mAh, и вы хотите оставить 20% емкости, установите предупреждение на 1040 (80% от 1300).
- Важно: Этот параметр работает только если у вас настроен датчик тока и потребленная емкость отображается на OSD.
- Обычно измеряется в mAh (миллиампер-часах).
-
Altitude (Высота):
- Этот параметр устанавливает пороговое значение для высоты полета.
- Если дрон поднимется выше установленной высоты, на экране OSD будет отображаться предупреждение.
- Этот параметр может быть полезен для соблюдения ограничений по высоте в определенных областях или для предотвращения случайного превышения безопасной высоты.
- Единицы измерения высоты зависят от ваших настроек OSD (метры или футы).
- Важно: Для работы этого предупреждения, ваш дрон должен иметь GPS и работающую функцию определения высоты.
-
Minutes (Минуты):
- Этот параметр устанавливает пороговое значение для времени полета в минутах.
- Если время полета превысит установленное значение, на экране OSD будет отображаться предупреждение.
- Это полезно для предотвращения переразряда батареи, особенно если у вас нет надежного датчика тока.
- Это значение работает независимо от настройки источника таймера (Armed, On Time и т.д.) в разделе “Timers”.
- Значение указывается в минутах.
Как использовать раздел “Alarms” (Предупреждения):
- Определите, какие предупреждения вам нужны: Подумайте, какие параметры вы хотите отслеживать и какие значения считаете небезопасными.
- Установите значения порогов: Используйте стрелки вверх/вниз для установки пороговых значений для каждого параметра.
- Протестируйте: Протестируйте предупреждения в реальных условиях полета, чтобы убедиться, что они срабатывают вовремя и обеспечивают достаточно времени для принятия мер.
- Включите отображение предупреждений в OSD: Убедитесь, что элемент “Warnings” (Предупреждения) выбран для отображения на экране OSD в разделе “Elements”.
Важные советы:
- Настройте предупреждения в соответствии с вашим оборудованием, условиями полета и стилем управления.
- Регулярно проверяйте и корректируйте значения порогов, чтобы обеспечить их актуальность.
- Не полагайтесь исключительно на предупреждения OSD. Всегда внимательно следите за состоянием дрона и принимайте решения на основе всех доступных данных.
- Слишком большое количество предупреждений может отвлекать. Выберите только самые важные.
- Выбирайте консервативные значения для предупреждений, чтобы иметь достаточный запас прочности.
Этот раздел является важной частью настройки OSD и играет ключевую роль в обеспечении безопасного и приятного полета.
Warnings
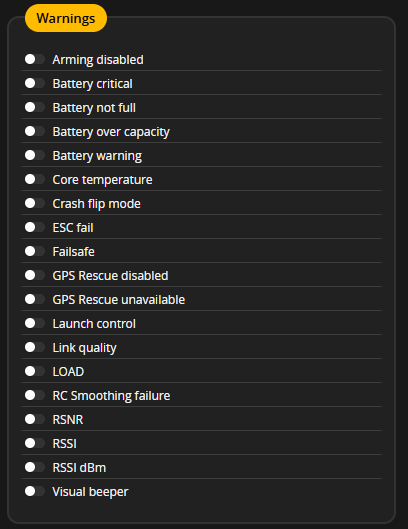
Этот раздел позволяет выбрать, какие конкретные предупреждения будут отображаться на экране OSD, если они возникнут. В отличие от пороговых значений из предыдущего раздела, здесь вы просто включаете/выключаете отображение определенных типов предупреждений.
Общая информация:
Правильная настройка списка предупреждений на OSD позволяет пилоту своевременно получать информацию о нештатных ситуациях, способствуя безопасному завершению полета и сохранению коптера.
Структура раздела “Warnings” (Предупреждения):
Раздел представляет собой список переключателей (включено/выключено) для различных типов предупреждений. Ниже приводится подробное описание каждого предупреждения:
- Arming disabled (активирование отключено): Отображает предупреждение, если попытка активирования дрона не удалась из-за какой-либо ошибки или ограничений (например, неправильный режим полета, отсутствие GPS-фиксации, небезопасные условия).
- Battery critical (Критический уровень заряда батареи): Отображает предупреждение, когда напряжение батареи достигает критически низкого уровня. Этот уровень определяется в настройках питания и батареи (Power & Battery). Включите это предупреждение обязательно!
- Battery not full (Батарея не полностью заряжена): Отображает предупреждение, если дрон подключен с батареей, которая не полностью заряжена. Это может быть полезно, если вы случайно пытаетесь взлететь с частично разряженной батареей.
- Battery over capacity (Превышение емкости батареи): Отображает предупреждение, если вы израсходовали больше емкости батареи (mAh), чем было установлено в настройках. Это помогает предотвратить переразряд. Включите это предупреждение, если у вас настроен датчик тока.
- Battery warning (Предупреждение о батарее): Отображает предупреждение, когда напряжение батареи опускается ниже установленного порогового значения (Battery warning voltage). Включите это предупреждение обязательно!
- Core temperature (Температура ядра): Отображает предупреждение, если температура процессора контроллера полета становится слишком высокой. Это может указывать на проблемы с охлаждением или перегрузку процессора.
- Crash flip mode (Режим переворота после падения): Отображает предупреждение, если активирован режим переворота после падения (Crash Flip Mode).
- ESC fail (Ошибка ESC): Отображает предупреждение, если один или несколько ESC сообщают об ошибке. Включите это предупреждение обязательно!
- Failsafe (Безопасный режим): Отображает предупреждение, если дрон переходит в режим Failsafe из-за потери сигнала радиоуправления. Включите это предупреждение обязательно!
- GPS Rescue disabled (GPS Rescue отключен): Отображает предупреждение, если функция GPS Rescue (спасение с помощью GPS) отключена.
- GPS Rescue unavailable (GPS Rescue недоступен): Отображает предупреждение, если функция GPS Rescue недоступна из-за отсутствия GPS-фиксации или других проблем. Включите это предупреждение, если используете GPS Rescue!
- Launch control (Управление запуском): Отображает предупреждение, если активирован режим управления запуском (Launch Control).
- Link quality (Качество связи): Отображает предупреждение, если качество связи между дроном и передатчиком становится низким (обычно для систем связи, таких как Crossfire или R9).
- LOAD (Загрузка): Отображает предупреждение, если загрузка процессора контроллера полета становится слишком высокой.
- RC Smoothing failure (Ошибка сглаживания RC): Отображает предупреждение об ошибке в фильтрах RC.
- RSNR (Отношение сигнал/шум): Отображает предупреждение, если отношение сигнал/шум приемника падает ниже установленного порога.
- RSSI (Уровень сигнала): Отображает предупреждение, если уровень сигнала приемника (RSSI) падает ниже установленного порога. Дублирует функциональность настройки RSSI в предыдущем разделе “Alarms”, но здесь вы просто включаете/выключаете само отображение предупреждения.
- RSSI dBm (Уровень сигнала в дБм): Отображает предупреждение, если уровень сигнала приемника (RSSI) в децибелах-милливаттах (dBm) падает ниже установленного порога.
- Visual beeper (Визуальный бипер): Отображает визуальный сигнал (мигающий элемент OSD), когда активируется звуковой бипер (обычно используется для поиска потерянного дрона).
Как использовать раздел “Warnings” (Предупреждения):
- Просмотрите список и определите важные предупреждения: Подумайте, какие предупреждения наиболее важны для вашей безопасности и сохранности дрона.
- Включите соответствующие переключатели: Активируйте переключатели рядом с теми предупреждениями, которые вы хотите видеть на OSD.
- Проверьте и настройте: В некоторых случаях (например, RSSI) вам также потребуется настроить пороговые значения в других разделах (вкладка “Alarms”).
Рекомендуемые предупреждения к включению (минимум):
- Battery critical
- Battery warning
- ESC fail
- Failsafe
Важные советы:
- Не перегружайте OSD слишком большим количеством предупреждений. Отображайте только те, которые действительно важны для вас.
- Убедитесь, что вы понимаете, что означает каждое предупреждение и как на него реагировать.
- Настройте пороговые значения (где это применимо) в соответствии с вашим оборудованием и стилем полета.
- Выбирайте те предупреждения, которые соответствуют вашему типу полетов (например, если вы не летаете далеко, то предупреждение о низком RSSI не критично).
Правильная настройка предупреждений OSD - важная часть подготовки к полету и может помочь вам избежать неприятностей.
Post Flight Statistics
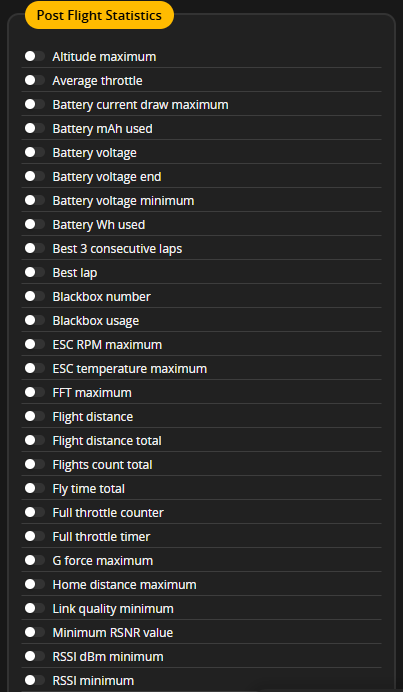
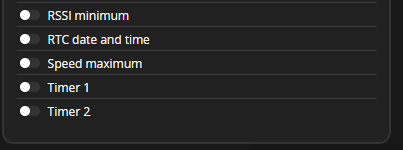
Раздел позволяет выбрать, какие статистические данные о полете будут отображаться на экране OSD после посадки дрона (после дизарма моторов). Эта информация помогает анализировать полет и улучшать свои навыки.
Общая информация:
После полета, когда дрон деактивирован, Betaflight может отображать сводку важных данных, собранных во время полета. Эта статистика может включать максимальную высоту, потребленную емкость батареи, максимальную скорость и многое другое. Настройка этого раздела позволяет вам видеть наиболее интересные для вас данные.
Структура раздела “Post Flight Statistics” (Статистика после полета):
Раздел “Post Flight Statistics” представляет собой список переключателей (включено/выключено) для различных статистических данных. Ниже приводится подробное описание каждого элемента:
- Altitude maximum (Максимальная высота): Отображает максимальную высоту, достигнутую во время полета.
- Average throttle (Средний газ): Отображает среднее значение газа в течение полета.
- Battery current draw maximum (Максимальный потребляемый ток батареи): Отображает максимальный ток, потребленный батареей во время полета.
- Battery mAh used (Потребленная емкость батареи, мАч): Отображает общее количество mAh (миллиампер-часов), потребленных батареей во время полета. Включите это предупреждение, если у вас настроен датчик тока.
- Battery voltage (Напряжение батареи): Отображает напряжение батареи на момент приземления.
- Battery voltage end (Напряжение батареи в конце полета): Отображает напряжение батареи в момент окончания полета (при посадке).
- Battery voltage minimum (Минимальное напряжение батареи): Отображает минимальное напряжение батареи, зафиксированное во время полета. Включите это предупреждение обязательно!
- Battery Wh used (Потребленные ватт-часы): Отображает общее количество Wh (ватт-часов), потребленных батареей во время полета.
- Best 3 consecutive laps (3 лучших последовательных круга): Отображает время трех лучших последовательных кругов, если вы летаете по трассе. (Для работы требуется настроенный таймер кругов)
- Best lap (Лучший круг): Отображает время лучшего круга, если вы летаете по трассе. (Для работы требуется настроенный таймер кругов)
- Blackbox number (Номер Blackbox): Отображает номер текущей записи Blackbox.
- Blackbox usage (Использование Blackbox): Отображает процент использованного места в Blackbox.
- ESC RPM maximum (Максимальные обороты ESC): Отображает максимальные обороты мотора, зафиксированные одним из ESC.
- ESC temperature maximum (Максимальная температура ESC): Отображает максимальную температуру ESC, зафиксированную во время полета.
- FFT maximum (Максимум БПФ): Отображает максимальное значение Быстрого преобразования Фурье.
- Flight distance (Дальность полета): Отображает максимальное расстояние, на которое вы удалялись от точки старта во время полета. (Требуется GPS)
- Flight distance total (Общая дальность полета): Отображает общую дальность, пройденную дроном за время полета. (Требуется GPS)
- Flights count total (Общее количество полетов): Отображает общее количество полетов, записанных контроллером полета.
- Fly time total (Общее время полета): Отображает общее время, проведенное в полете за все полеты, записанные контроллером.
- Full throttle counter (Счетчик полного газа): Отображает количество раз, когда во время полета вы достигали полного газа.
- Full throttle timer (Таймер полного газа): Отображает общее время, проведенное на полном газе во время полета.
- G force maximum (Максимальная перегрузка): Отображает максимальную перегрузку, зафиксированную во время полета.
- Home distance maximum (Максимальное расстояние до дома): Отображает максимальное расстояние от дрона до точки “Дом” (места старта), зафиксированное во время полета. (Требуется GPS)
- Link quality minimum (Минимальное качество связи): Отображает минимальное качество связи (например, значение LQI для Crossfire) за время полета.
- Minimum RSNR value (Минимальное значение RSNR): Отображает минимальное значение RSNR (отношение сигнал/шум) за время полета.
- RSSI dBm minimum (Минимальный RSSI в дБм): Отображает минимальный уровень сигнала (RSSI) в дБм (децибел-милливаттах), зафиксированный за время полета.
- RSSI minimum (Минимальный RSSI): Отображает минимальный уровень сигнала (RSSI), зафиксированный за время полета.
- RTC date and time (Дата и время RTC): Отображает дату и время в момент окончания полета.
- Speed maximum (Максимальная скорость): Отображает максимальную скорость, достигнутую во время полета. (Требуется GPS)
- Timer 1 (Таймер 1): Отображает значение таймера 1 в момент окончания полета.
- Timer 2 (Таймер 2): Отображает значение таймера 2 в момент окончания полета.
Как использовать раздел “Post Flight Statistics” (Статистика после полета):
- Определите, какие данные вам интересны: Просмотрите список и выберите, какую статистику вы хотите видеть после каждого полета.
- Включите соответствующие переключатели: Активируйте переключатели рядом с теми элементами статистики, которые вы хотите отображать.
- Посмотрите результаты: После посадки и деактивирования дрона, выбранная статистика будет отображаться на экране OSD.
Рекомендуемые элементы для включения (общие):
- Battery mAh used (Потребленная емкость батареи)
- Battery voltage minimum (Минимальное напряжение батареи)
- Flight distance total (Общая дальность полета) (если есть GPS)
- Speed maximum (Максимальная скорость) (если есть GPS)
- Timer 1 (Таймер 1)
Важные советы:
- Настройте статистику в соответствии с вашими целями и интересами.
- Этот раздел полезен для анализа полета, оценки производительности и выявления потенциальных проблем.
- Обратите внимание, что для отображения некоторых данных (например, дальность полета, скорость) требуется наличие GPS.
- Используйте эту статистику для улучшения своих навыков пилотирования и оптимизации настроек дрона.
Этот раздел является отличным инструментом для самоанализа и улучшения ваших навыков пилотирования.
![]()
16: Видеопередатчик (Video Transmitter)
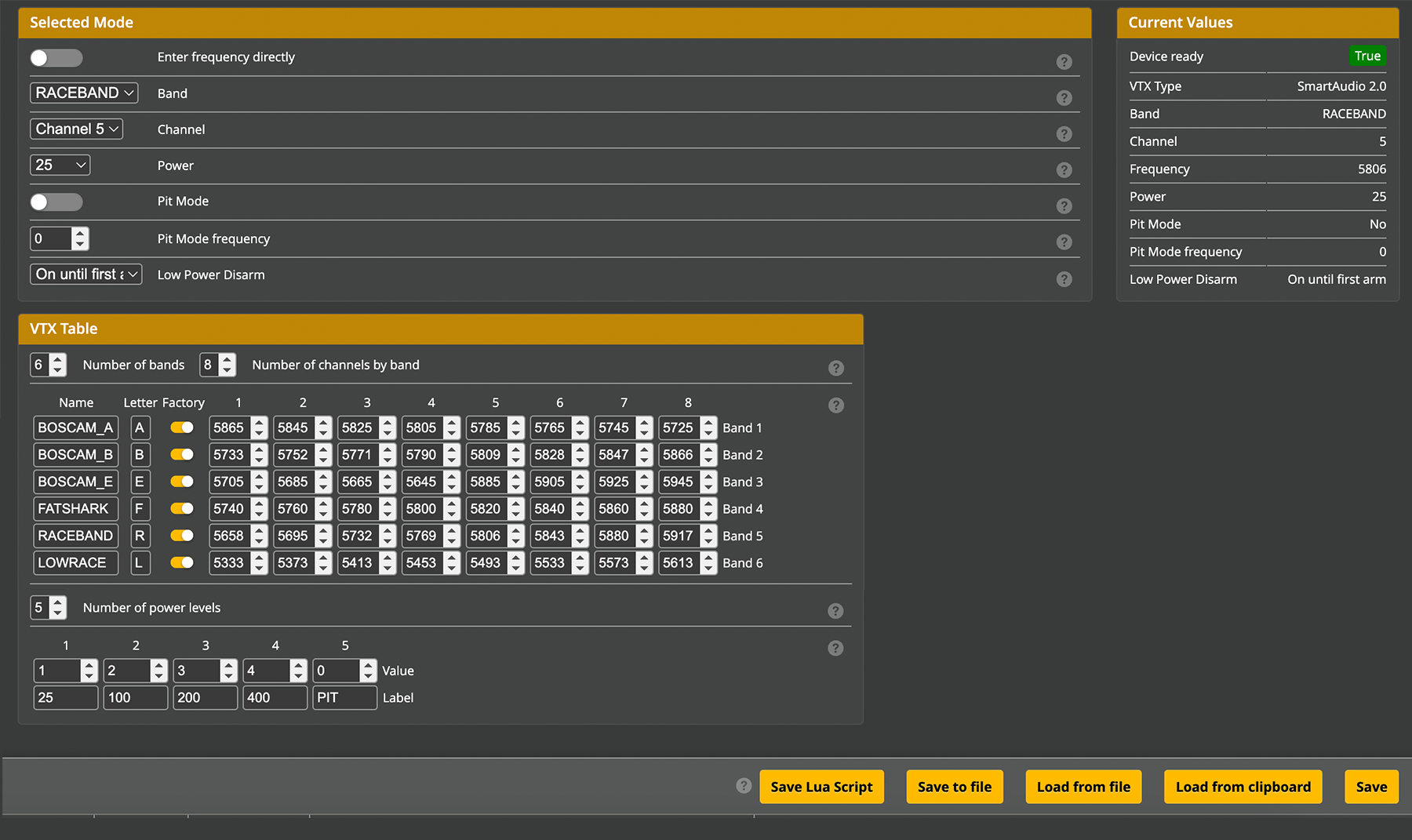
Вкладка позволяет настраивать ваш видеопередатчик (VTX), если он поддерживает протоколы SmartAudio или Tramp.
Общая информация:
Правильная настройка VTX критична для обеспечения хорошего качества видео и соблюдения правил использования частот. Эта вкладка предоставляет удобный интерфейс для управления VTX, избавляя от необходимости использования кнопок на самом VTX или конфигурации через OSD.
Разделы вкладки VTX:
-
Selected Mode (Выбранный режим):
- Enter frequency directly (Ввести частоту напрямую): Переключатель. Если включен, позволяет ввести частоту вручную. Обычно не рекомендуется, лучше использовать предопределенные каналы и диапазоны.
- Band (Диапазон): Выпадающее меню для выбора диапазона частот VTX (например, RACEBAND, FATSHARK, BOSCAM).
- Channel (Канал): Выпадающее меню для выбора канала в выбранном диапазоне.
- Power (Мощность): Выпадающее меню для выбора мощности VTX в милливаттах (мВт). Выбирайте в соответствии с вашими потребностями и правилами в вашем регионе.
- Pit Mode (Режим Pit): Переключатель для включения/выключения Pit Mode. В Pit Mode VTX передает на очень низкой мощности, чтобы не мешать другим пилотам перед гонкой. Всегда включайте Pit Mode перед подключением питания!
- Pit Mode frequency (Частота Pit Mode): Позволяет установить частоту в режиме Pit.
- Low Power Disarm (Низкая мощность при деактивировании): Выпадающее меню, определяющее, когда VTX должен переключаться на низкую мощность.
- On until first arm (Включен до первого арминга): Передатчик будет находиться в режиме пониженной мощности до первого арминга.
- Always (Всегда): Передатчик всегда будет находиться в режиме пониженной мощности, когда он деактивирован.
- Never (Никогда): Передатчик никогда не будет находиться в режиме пониженной мощности.
-
VTX Table (Таблица VTX):
- Number of bands (Количество диапазонов): Поле для указания количества диапазонов, поддерживаемых вашим VTX.
- Number of channels by band (Количество каналов в диапазоне): Поле для указания количества каналов, поддерживаемых каждым диапазоном.
- Таблица с частотами: Отображает таблицу с частотами для каждого диапазона и канала. Нажимая на значки с замками, можно заблокировать неиспользуемые каналы, чтобы избежать случайного выбора запрещенной частоты.
- Name (Имя): Название диапазона.
- Letter (Буква): Буква, обозначающая этот диапазон (используется некоторыми VTX и FPV-очками).
- Factory (Заводские настройки): Переключатель, позволяющий сбросить параметры на заводские.
- Частоты для каждого канала: Значения частот в МГц для каждого канала в диапазоне.
-
Number of power levels (Количество уровней мощности):
- Поле для указания количества уровней мощности, поддерживаемых вашим VTX.
- Таблица с уровнями мощности:
- Value (Значение): Фактическое значение мощности в мВт для каждого уровня.
- Label (Метка): Описание уровня мощности (например, “25mW”, “200mW”, “400mW”, “PIT”).
-
Current Values (Текущие значения):
- Device ready (Устройство готово): Показывает, обнаружен ли VTX и готов ли он к работе. Должно быть “True”!
- VTX Type (Тип VTX): Отображает тип протокола VTX (например, SmartAudio 2.0, Tramp).
- Band (Диапазон): Отображает выбранный диапазон.
- Channel (Канал): Отображает выбранный канал.
- Frequency (Частота): Отображает текущую частоту VTX в МГц.
- Power (Мощность): Отображает выбранную мощность VTX в мВт.
- Pit Mode (Режим Pit): Отображает статус Pit Mode (включен или выключен).
- Pit Mode Frequency (Частота в режиме Pit): Отображает частоту, используемую в режиме Pit.
- Low Power Disarm (Низкая мощность при деактивировании): Отображает текущую настройку низкой мощности при деактивировании.
Кнопки внизу:
- Save Lua Script (Сохранить Lua скрипт): Создает Lua-скрипт для управления VTX с помощью OpenTX (например, на пульте Taranis).
- Save to file (Сохранить в файл): Сохраняет текущие настройки VTX в файл.
- Load from file (Загрузить из файла): Загружает настройки VTX из файла.
- Load from clipboard (Загрузить из буфера обмена): Загружает настройки VTX из буфера обмена (например, скопированные из другого источника).
- Save (Сохранить): Сохраняет изменения, внесенные в конфигурацию VTX. Обязательно нажмите после внесения изменений!
Как использовать вкладку VTX:
- Убедитесь, что VTX подключен и настроен в конфигурации портов: Убедитесь, что VTX правильно подключен к контроллеру полета (обычно через UART-порт) и что этот порт настроен для использования SmartAudio или Tramp.
- Выберите правильный диапазон, канал и мощность: Используйте выпадающие меню, чтобы выбрать нужные значения.
- Настройте Pit Mode (если необходимо): Включите Pit Mode перед подключением батареи.
- Проверьте таблицу VTX: Убедитесь, что частоты в таблице соответствуют частотам вашего VTX и правилам, действующим в вашем регионе. Заблокируйте неиспользуемые каналы.
- Проверьте текущие значения: Убедитесь, что отображаемые текущие значения соответствуют вашим настройкам. Значение “Device ready” должно быть “True”.
- Сохраните изменения: Нажмите кнопку “Save”, чтобы сохранить конфигурацию.
Важные советы:
- Всегда используйте Pit Mode перед подключением питания и во время нахождения на стартовой площадке, чтобы не мешать другим пилотам.
- Соблюдайте правила использования частот в вашем регионе. Использование неразрешенных частот или слишком высокой мощности может привести к штрафам.
- Сохраняйте свои настройки VTX в файл, чтобы иметь возможность быстро восстановить их в случае необходимости.
- Используйте Lua-скрипт для управления VTX с пульта, что обеспечивает еще более удобный контроль.
Вкладка VTX упрощает настройку и управление видеопередатчиком, делая процесс более удобным и безопасным.
Настройка переключения мощности тумблером:
- Сначала нужно в разделе Modes назначить свободный тумблер на какой-либо канал.
- Затем переходим в командную строку (CLI).
- Пишем команды для настройки VTX, например,
vtx_table_band 1 3 0 0 900 2100(где 3 - это номер AUX канала-1, а последние числа - диапазон активации для каждого уровня мощности).
Подробная инструкция по переключению мощности передатчика VTX с пульта ⇒ Переключение VTX
Обязательно в конце написать save.
17: Черный ящик (Blackbox)
Раздел Blackbox позволяет записывать данные полета вашего дрона для последующего анализа. Это мощный инструмент для диагностики проблем, оптимизации настроек и повышения производительности полетов.
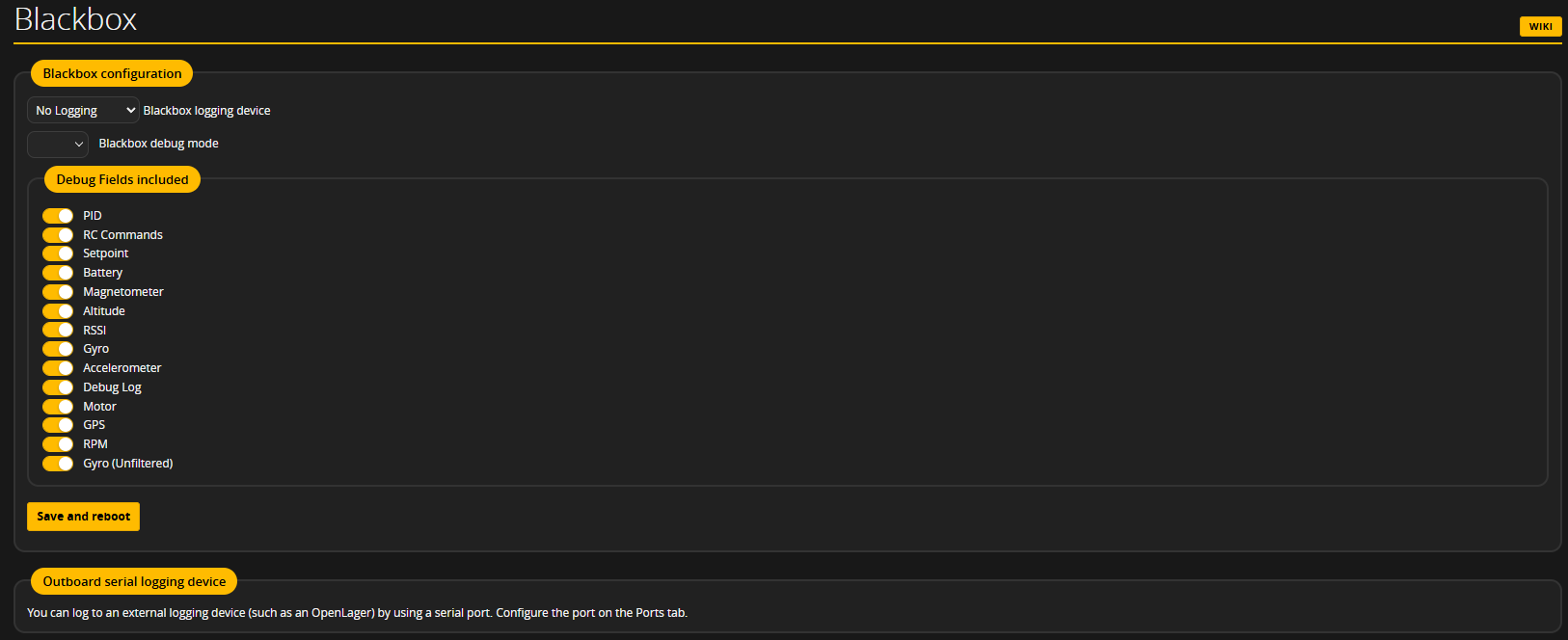
- Записывает разнообразные данные о полете: сигналы управления, статус сенсоров, параметры PID, состояние ESC и т.д.
- Позволяет просматривать записанные данные в виде графиков для детального анализа с помощью программы Betaflight Blackbox Explorer.
- Помогает выявить проблемы с настройкой или аппаратным обеспечением: вибрация, пропуски сигналов или помехи.
- На основе анализа записанных данных вы можете оптимизировать настройки PID, фильтров и других параметров.
- Вы можете настроить частоту записи данных (например, 1 кГц, 2 кГц и т.д.).
- Выберите, сколько данных вы хотите сохранить (весь полет или определенный отрезок).
- Скачиваем файлик к себе на компьютер и открываем с помощью программы Betaflight Blackbox Explorer.
- Не забываем чистить память черного ящика на вашем дроне, чтобы было место для новых записей.
Подробно о BlackBox
Примечание о мобильном приложении
Мобильное приложение для Betaflight — это программа, доступная для Android и iOS, которая позволяет подключать полётный контроллер дрона с прошивкой Betaflight к смартфону или планшету. Основные функции приложения включают возможность менять настройки полётного контроллера прямо с мобильного устройства без необходимости использовать компьютер.
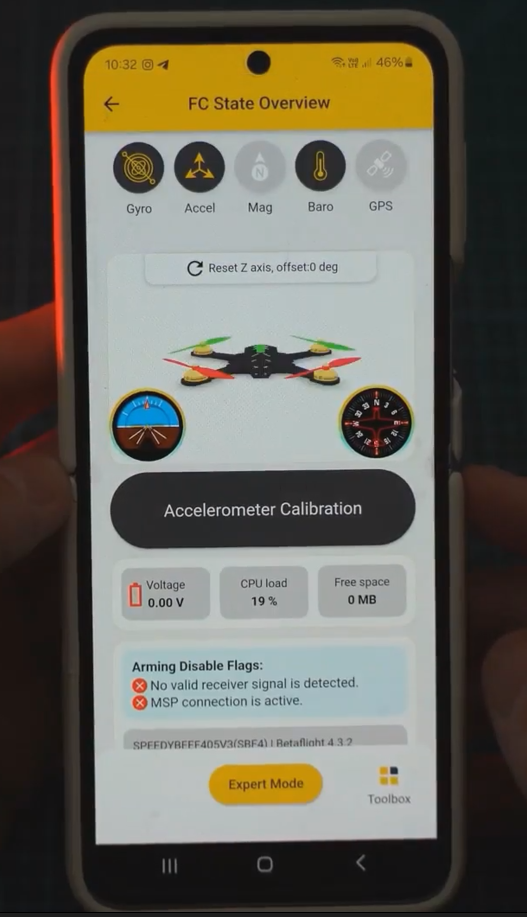
Подключение возможно двумя способами: через проводное подключение с использованием OTG-кабеля или через Bluetooth-модуль (обычно для Android). Интерфейс приложения похож на Betaflight Configurator на ПК и включает все основные вкладки для настройки: порты, конфигурация, пид-тюнинг, фильтры, ресивер, режимы, моторы, чёрный ящик, командная строка и статус устройства.
Такое мобильное приложение удобно использовать в полевых условиях, когда под рукой нет компьютера. Оно позволяет быстро и удобно менять параметры, делать тесты и мониторить состояние дрона. В будущем возможно появление функции прошивки контроллера через само приложение.
Одним из популярных мобильных приложений для Betaflight является SpeedyBee, которое поддерживает расширенные функции и удобный интерфейс для управления настройками дронов.
Приложение1
⇒ Конфигурация зуммера (Beeper Configuration)| Блок
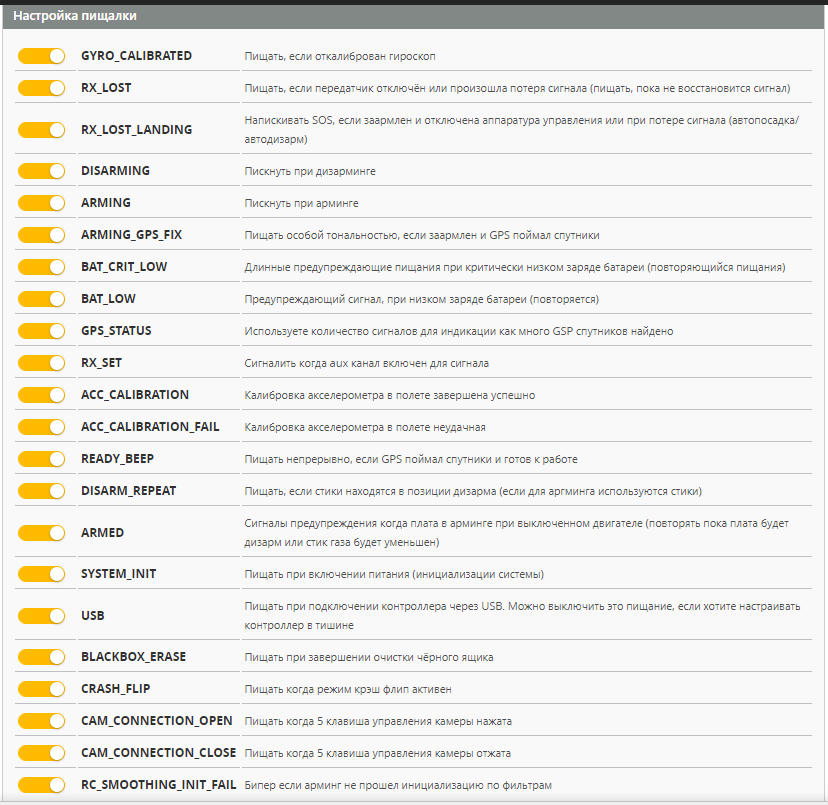
Позволяет включать или отключать звуковые сигналы (биперы) для различных событий и состояний дрона.
| Настройка | Описание |
|---|---|
| GYRO_CALIBRATED | Зуммер издаёт сигнал после калибровки гироскопа. |
| RX_LOST | Зуммер сигнализирует при потере сигнала пульта управления (повторяется, пока сигнал не восстановится). |
| RX_LOST_LANDING | Зуммер сигнализирует при потере сигнала пульта во время посадки. |
| DISARMING | Зуммер подаёт сигнал при выключении моторов (disarm). |
| ARMING | Зуммер сигнализирует при арминге дрона (arm). |
| ARMING_GPS_FIX | Зуммер подаёт сигнал при взведении моторов, если дрон получил GPS фиксацию |
| BAT_CRIT_LOW | Зуммер сигнализирует при критически низком заряде батареи (повторяется). (уровень устанавливается на вкладке Аккумулятор). |
| BAT_LOW | Зуммер подаёт сигнал при низком заряде батареи (повторяется). |
| GPS_STATUS | Зуммер издаёт количество сигналов, равное числу найденных спутников GPS. |
| RX_SET | Зуммер сигнализирует при включении режима BEEPER. |
| ACC_CALIBRATION | Зуммер подаёт сигнал при успешной калибровке акселерометра в полёте (только звуковой бипер). |
| ACC_CALIBRATION_FAIL | Зуммер сигнализирует при неудачной калибровке акселерометра в полёте. |
| READY_BEEP | Зуммер подаёт сигнал, когда GPS зафиксировал позицию и дрон готов к взведению (arming). |
| DISARM_REPEAT | Зуммер сигнализирует, если стики находятся в позиции выключения моторов (disarm). |
| ARMED | Зуммер издаёт сигнал, когда дрон взведён, но моторы не вращаются (повторяется до повышения газа или выключения моторов). |
| SYSTEM_INIT | Зуммер сигнализирует при включении питания полётного контроллера. |
| USB | Зуммер подаёт сигнал при питании от USB. Можно отключить, чтобы не мешал при настройке на столе. |
| BLACKBOX_ERASE | Зуммер сигнализирует при стирании логов Blackbox. |
| CRASH_FLIP | Зуммер подаёт сигнал при активации режима переворота после падения (crash flip). |
| CAM_CONNECTION_OPEN | Зуммер сигнализирует при открытии меню OSD с помощью 5-кнопочного управления. |
| CAM_CONNECTION_CLOSE | Зуммер подаёт сигнал при закрытии меню OSD. |
| RC_SMOOTHING_INIT_FAIL | Зуммер сигнализирует, если дрон взведён, но функция сглаживания RC не инициализирована. |
- Среда, 24 сентября 2025