
14/2. Пошаговая настройка 10-дюймового FPV-дрона.
На занятии нет "подробного объяснения" параметров настройки. Подразумевается, что все применяемые здесь возможности Конфигуратора Betaflight изучены на предыдущих занятиях и, вслучае необходимости, к ним можно вернуться.
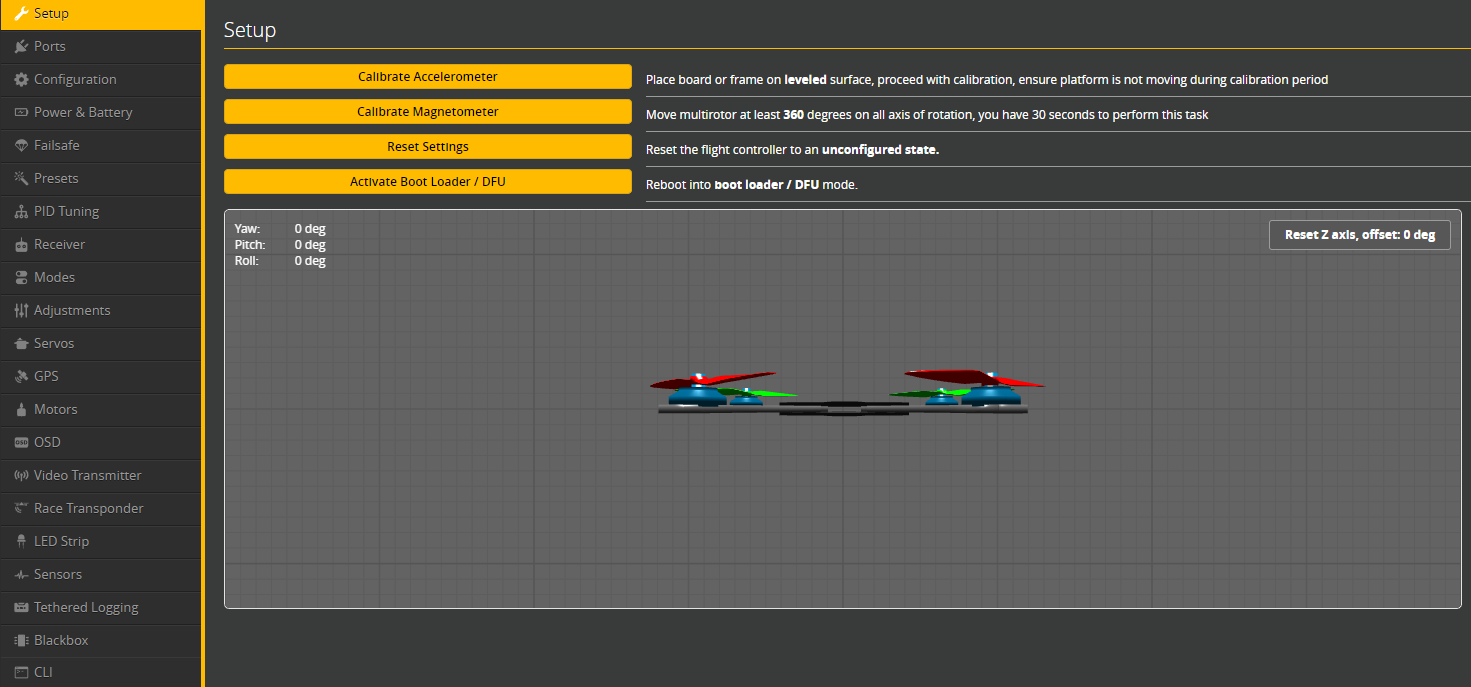
Шаг 16: Калибровка акселерометра
Открываем программу Betaflight. В первую очередь нам нужно откалибровать акселерометр, положив дрон на ровную поверхность, нажав кнопку .
Калибровка помогает точно определить положение дрона в пространстве, что, в свою очередь, улучшает реакцию на команды и точность. Калибровка акселерометра в Betaflight не является процедурой, которую нужно выполнять очень часто. Обычно рекомендуется проводить калибровку после первой установки контроллера на раму дрона, если вы заменяете компоненты или осуществляете большие модификации в вашем дроне, или после сильного падения.
Шаг 17: Проверка гироскопа и акселерометра
Для проверки гироскопа и акселерометра на flight-контроллере нужно покрутить дрон в разные стороны, чтобы понять, что его оси работают в соответствии с вашими движениями.
Чтобы это корректно сделать, нужно взять в руки свой дрон камерой к монитору или от себя, нажать на кнопку Reset Z axis offset. Сначала наклонить дрон по pitch вперед, назад, потом по roll влево, вправо, yaw влево, вправо. Порядок не важен, главное, чтобы ваши движения совпадали с тем, что вы видите на мониторе.
Если все соответствует вашим движениям, это означает, что Полетный контроллер работает корректно.
Шаг 18: Настройка портов
Переходим к следующему разделу Ports. Здесь нам нужно включить видеопередатчик (VTX). Он у нас припаян на UART1. Выбираем в выпадающем списке в столбце Peripherals параметр VTX TBS Smart Audio (т.к. наш видеопередатчик VTX работает на протоколе TBS Smart Audio).
Далее нужно выбрать UART, к которому припаян приемник. У нас это UART6. Активируем UART6 в столбце Serial RX.

Готово! Нажимаем кнопку Save and Reboot.
Шаг 19: Конфигурация
Переходим в раздел Configuration.
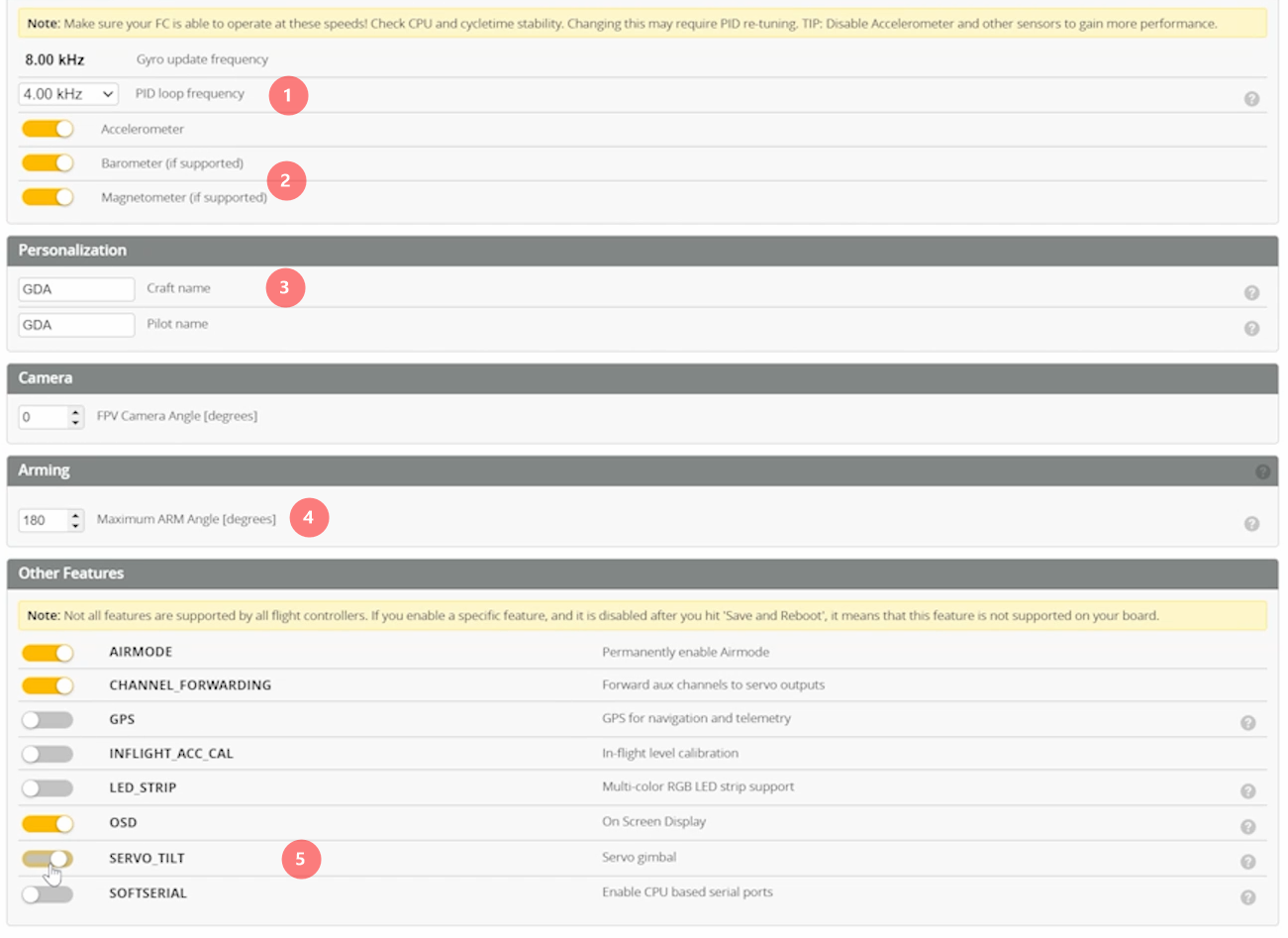
- Значение PID loop frequency выставляем на 4 килогерца. Более высокие частоты могут требовать больше вычислительной мощности, что может повлиять на общую производительность контроллера. Это лучший баланс между производительностью и стабильностью для F4 процессоров.
- Ставим галочки на барометр и магнитометр, если они есть.
- Далее можем придумать имя нашему дрону.
- Значение Maximum ARM Angle выставляем на
180градусов. - У нас на дроне установлен сервопривод, поэтому нужно поставить галочку
Servo Tilt.
Готово! Нажимаем кнопку Save and Reboot.
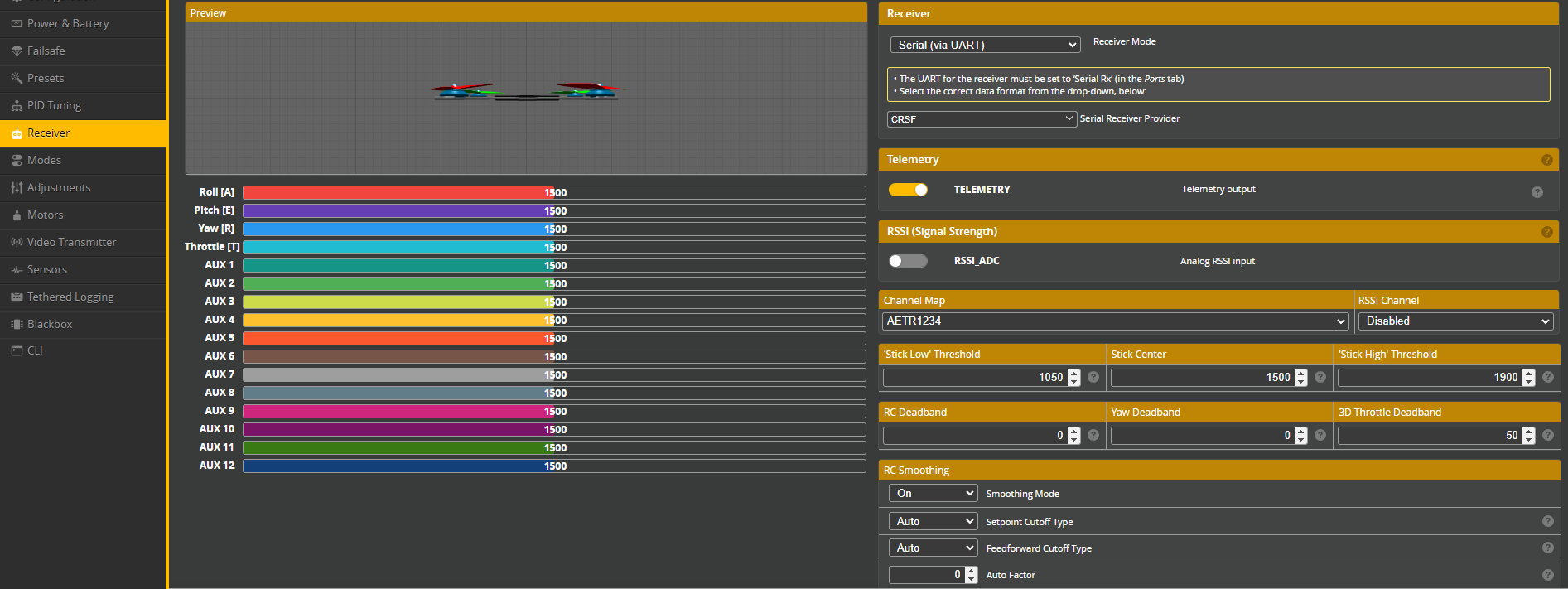
Шаг 20: Настройка приемника
В первой половине занятия был приведен перечень используемого оборудования для сборки дрона. Настройки ниже приводятся исключительно с учетом приведенной конфигурации.
Переходим к следующей вкладке Receiver. Здесь нам нужно настроить тип протокола, каналы управления и другие важные параметры, чтобы обеспечить корректную работу дрона. Назначение параметров мы рассматривали в предыдущих занятиях.
Вкладка Receiver:
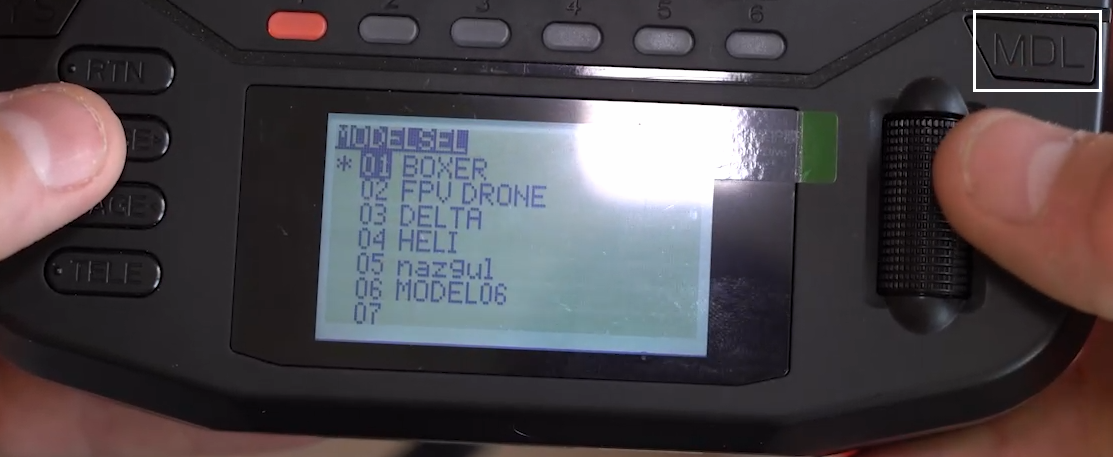
Включаем аппаратуру управления. Если у вас внешний модуль, то нажимаем клавишу Model
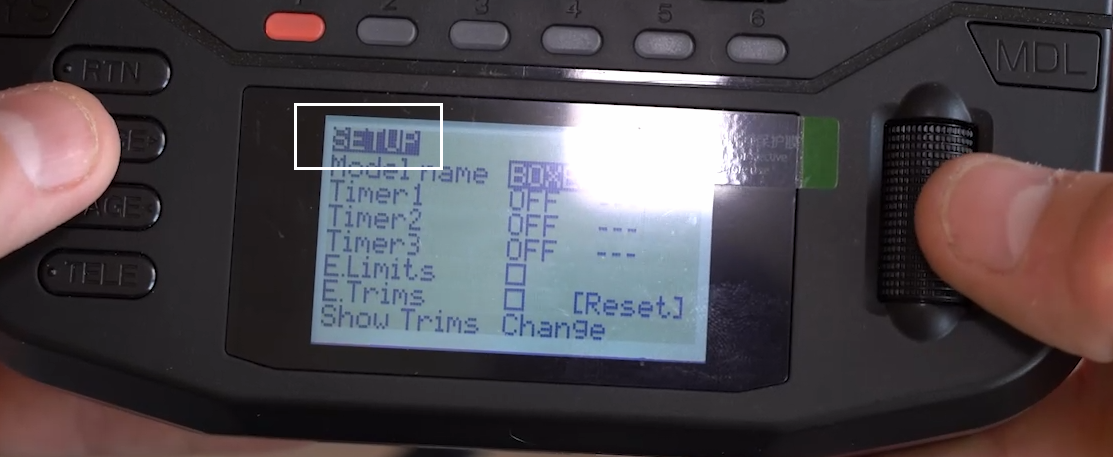
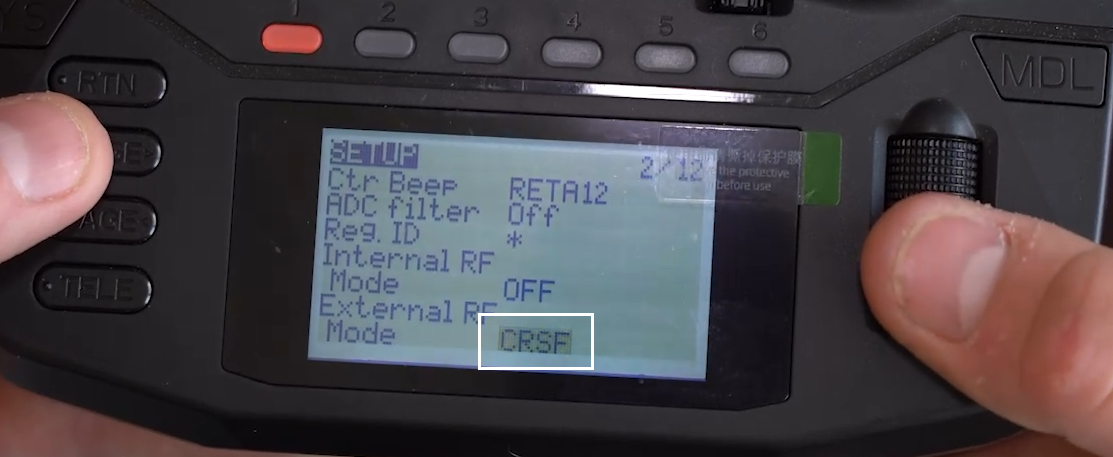
Далее переходим на вторую страницу Setup. В списке ищем External RF. Ставим значение CRSF.
Выходим в главное меню. Нажимаем клавишу SYS
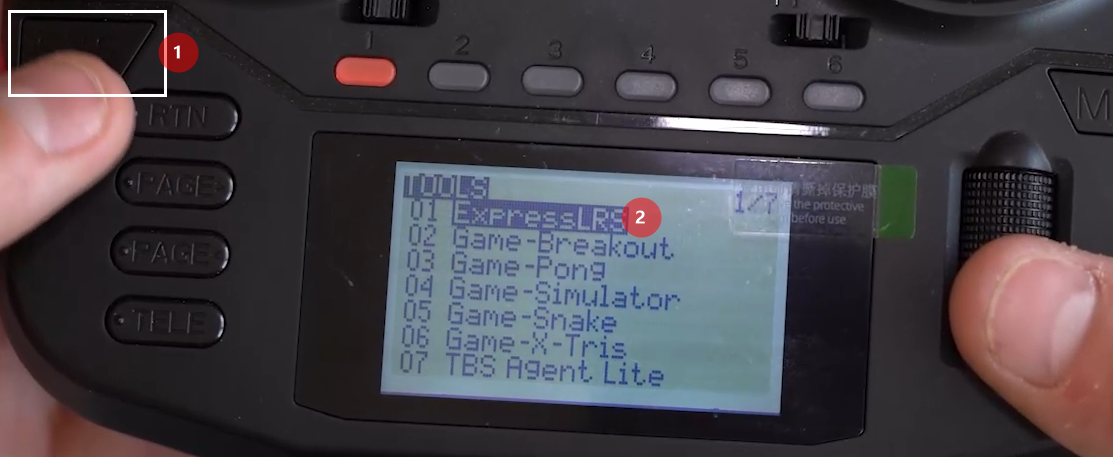
Находим протокол ExpressLRS, выбираем его ⇑. Далее выбираем Bind ⇓.
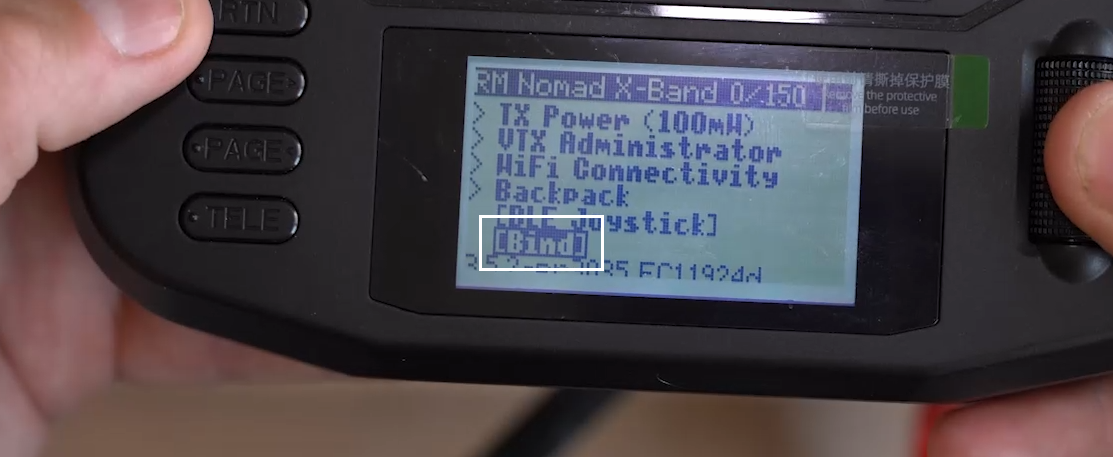
Теперь трижды включаем/выключаем питание приемника ELRS на дроне (трижды "дергаем " разъем аккумулятора) . Приемник таким образом переходит в режим связывания (binding), на нем загорается светодиод.
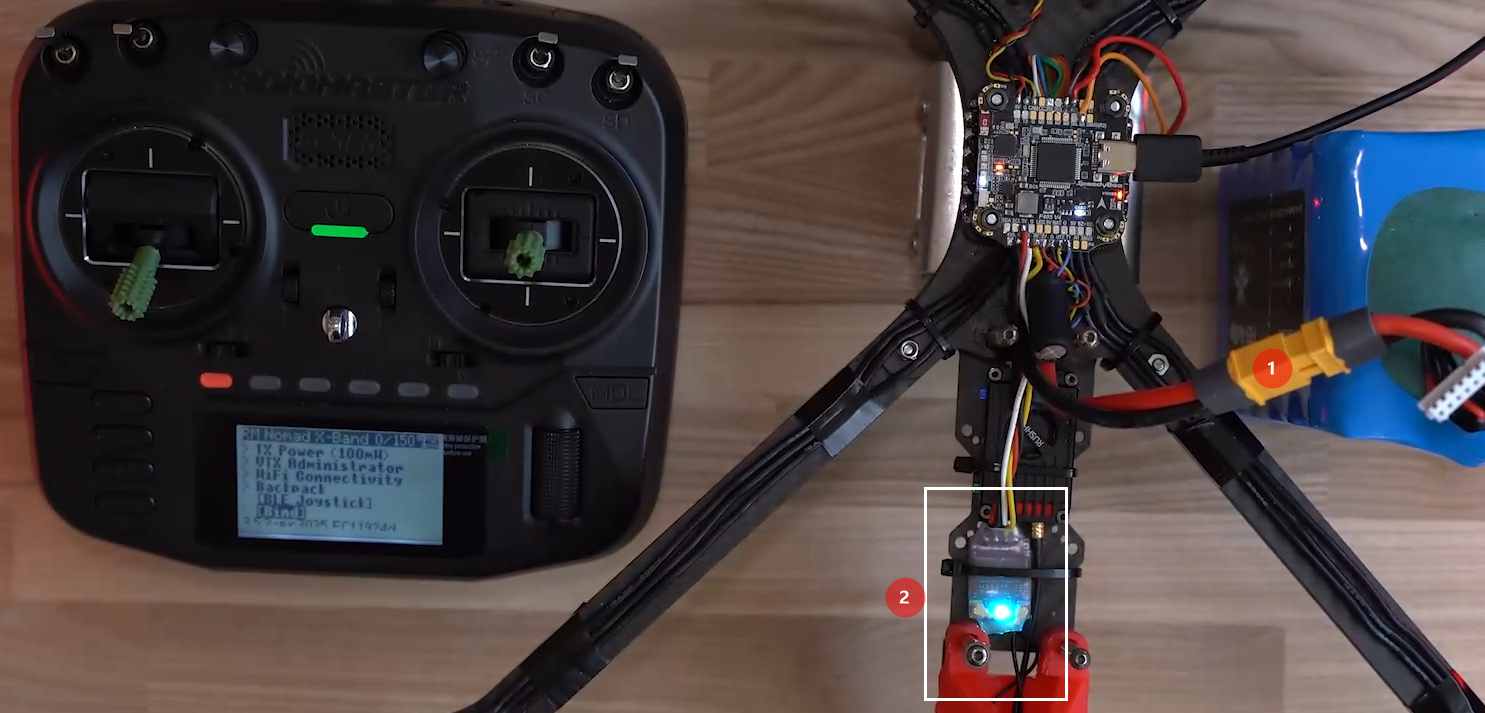
Все готово. Приемник увидел радиопередатчик. Возвращаемся к Betaflight.
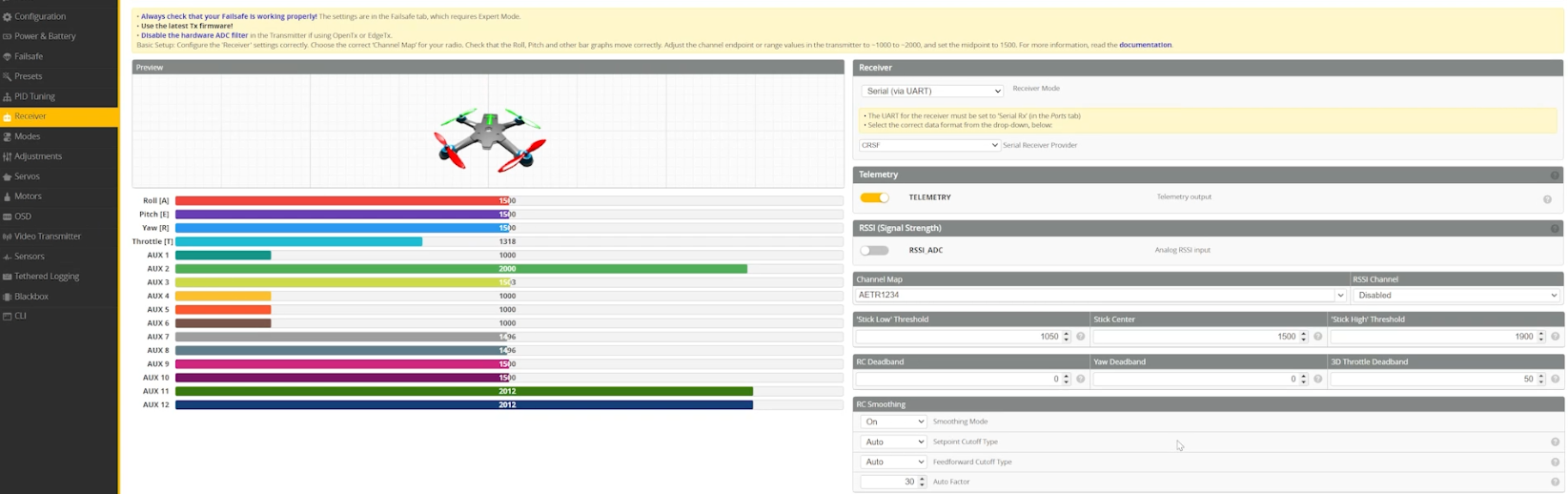
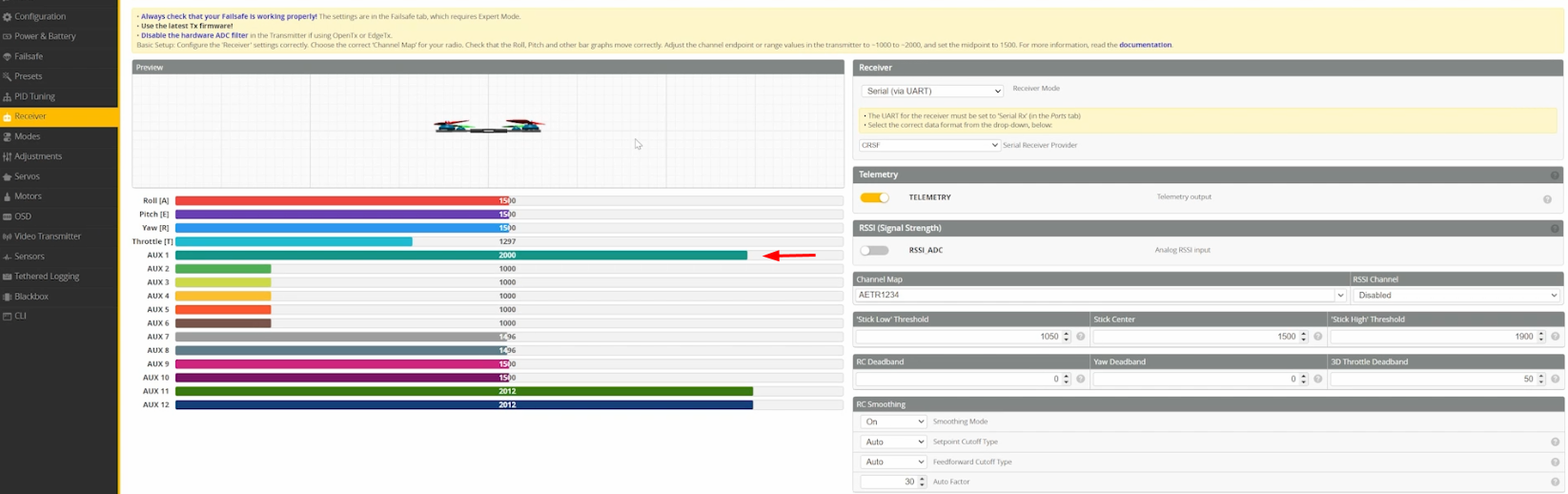
Во вкладке Receiver выбираем Serial (via UART). Провайдер CRSF.
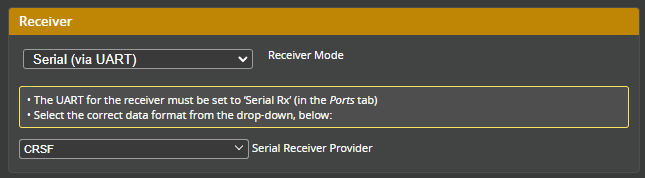
Нажимаем кнопку Save.
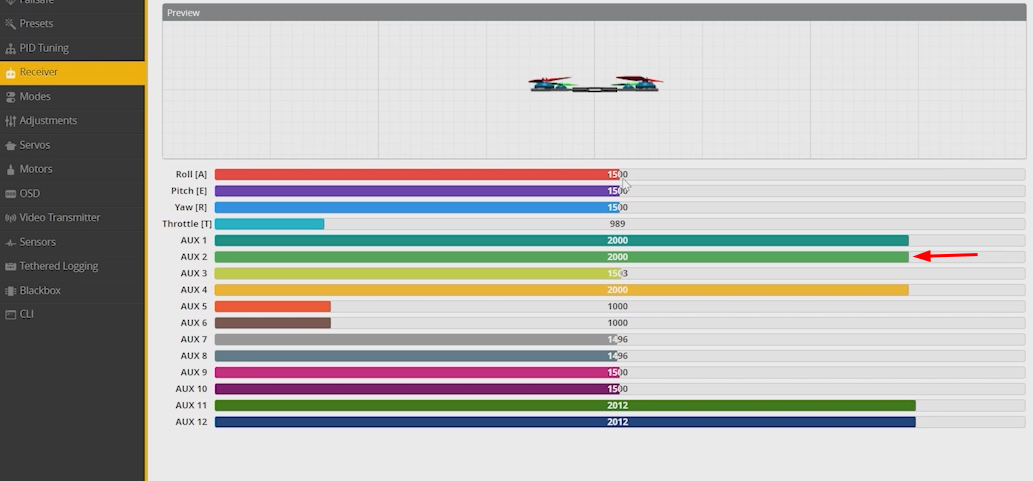
Если все работает верно, то в окошке Preview мы должны увидеть поступление импульсов с передатчика на приемник (двигаются цветные индикаторы в обозначениях каналов).
Шаг 21: Настройка функции Arm/Disarm
Теперь нам нужно назначить двухпозиционный тумблер на активацию дрона, то есть функцию Arm и Disarm. Для этого выбираем канал AUX 1.
⇒ Переходим на вкладку Modes. Ищем в списке Arm. Нажимаем на кнопку Add Range. В списке выбираем AUX 1. Сдвигаем диапазон в одну из сторон (у нас АРМ будет в диапазоне от 1300 до 2000 мкс).
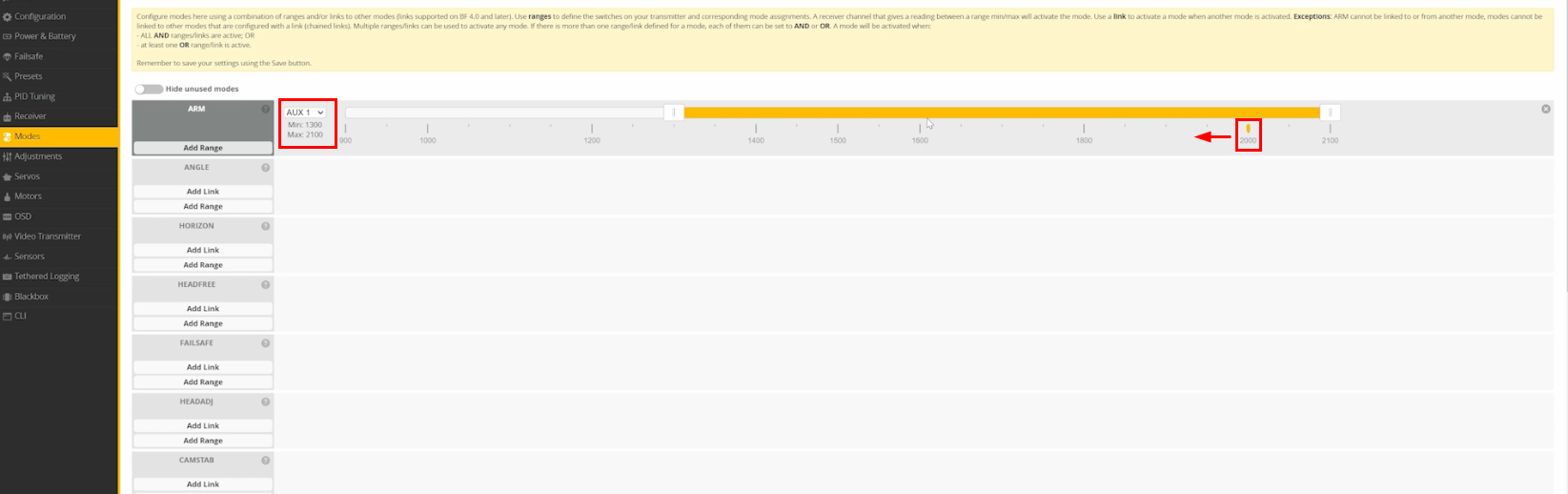
Проверяем тумблер, видим, что при переключении желтая риска перемещается между двумя крайними положениями и попадает в желтый сектор диапазона.
Готово. Сохраняем.
Шаг 22: Проверка двигателей
Переходим к следующей вкладке Motors. Здесь мы можем проверить, работают ли двигатели на дроне, и узнать направление их вращения.
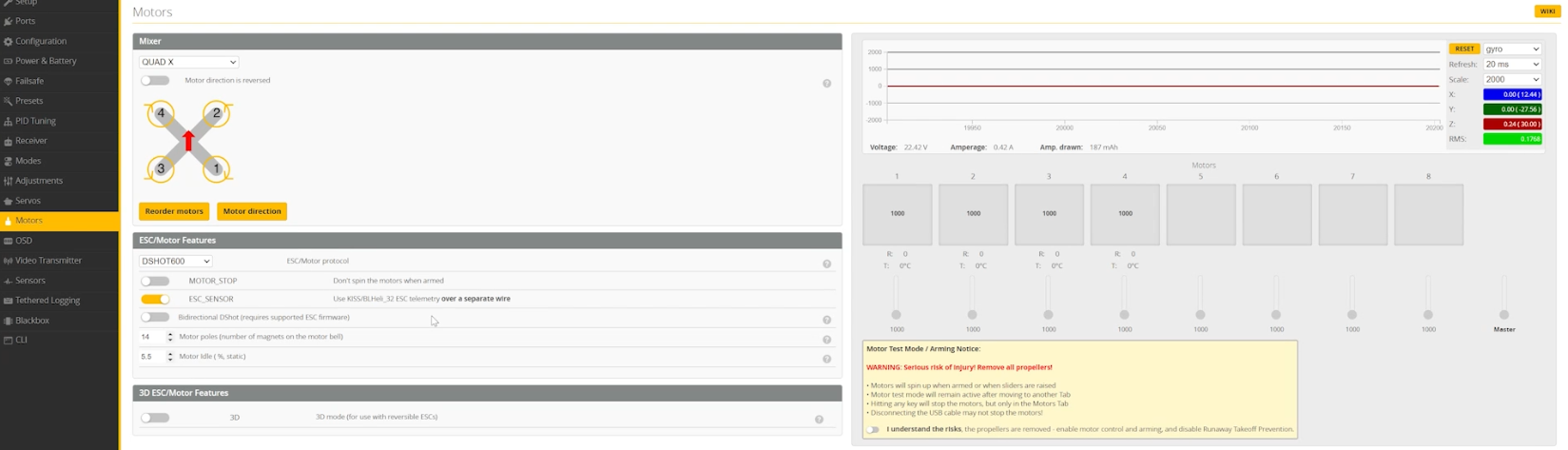
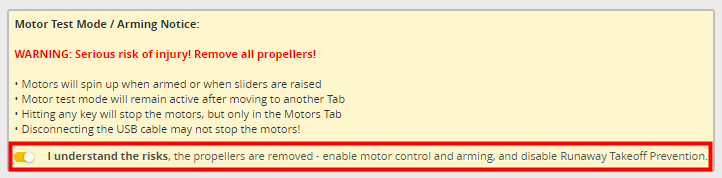
Для проверки нужно снять все пропеллеры с двигателей и нажать галочку, которая предупреждает нас об опасности проверки двигателей, если вы забыли снять пропеллеры.
Берем слайдер Master и потихоньку его поднимаем. Ни в коем случае нельзя резко поднимать его, тем более на максимальное значение.
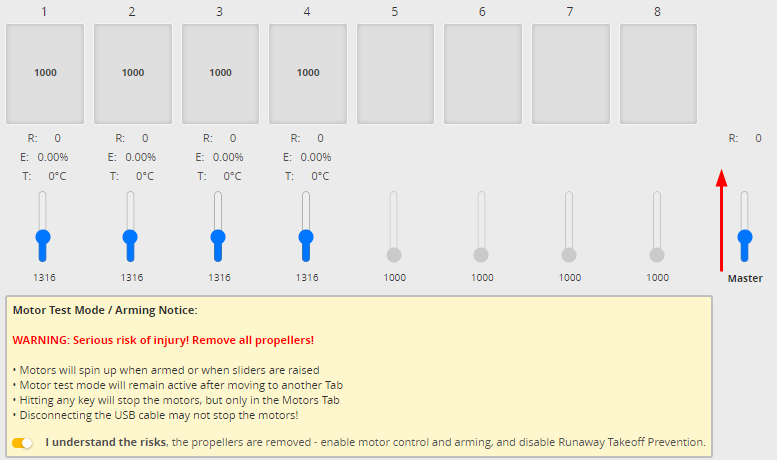
Проверяем, правильно ли работают двигатели. Запоминаем направление каждого двигателя.

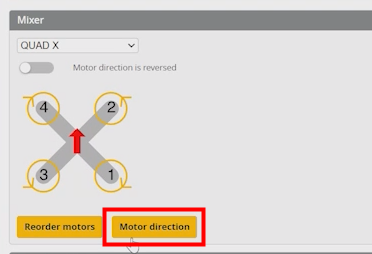
Наши двигатели вращаются по принципу Props In (по выбору). Допустим, мы хотим переделать на Props Out. Для этого нажимаем клавишу Motor Direction.
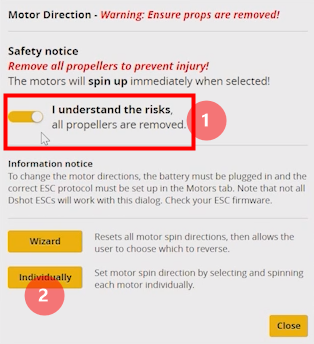
Активируем I understand the risks. Выбираем Individual (Индивидуальная).
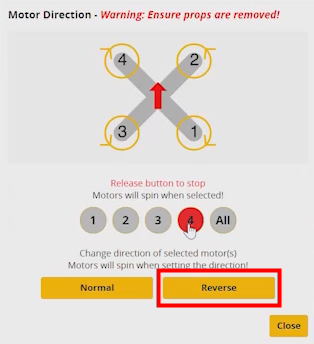
Далее нажимаем клавишу Reverse и индивидуально смотрим, чтобы выбранный двигатель начал вращаться в нужную нам сторону. Настройка запоминает последнее нажатие кнопки и выбранное направление вращения двигателя.
Шаг 23: Настройка OSD (On-Screen Display)
Переходим к следующей вкладке OSD. Нас здесь интересуют следующие параметры телеметрии для отображения их на видеоизображении с камеры:
- Attitude — с помощью барометра на дроне отображается высота полета дрона.
- Battery Avg Cell Voltage — среднее напряжение элементов аккумулятора.
- Battery Current Draw — потребление тока от аккумулятора.
- Battery Voltage — это отображение текущего напряжения аккумулятора во время полета дрона.
- Compass — может отображать информацию о направлении движения дрона относительно сторон света, что помогает быстро сориентироваться в пространстве и принимать правильные решения во время полета.
- Crosshair — помогает пилоту ориентироваться в пространстве, указывая на центр экрана.
- Armed/Disarmed — это режим, который определяет, запущены ли двигатели дрона или нет, и пилот четко понимает, когда дрон готов к полету и когда он в безопасном состоянии.
- Flight Mode — показывает выбранный пилотом режим полета, в котором сейчас работает дрон.
- RSSI dBm Value — измеряет силу принятого сигнала приемником от передатчика.
- Throttle Position — количество газа в процентах.
- Timer Flight Minutes — таймер времени полета с момента запуска дрона.
- VTX Channel — каналы видеопередатчика.
- Warnings — предупреждения.
- Link Quality — Качество связи, измеряемое в процентах неповрежденных данных, которые проходят через приемник.

Это основные параметры, которые должны быть настроены для дрона. Нажимаем кнопку Save.
Шаг 24: Настройка видеопередатчика
Переходим к следующей вкладке Video Transmitter.
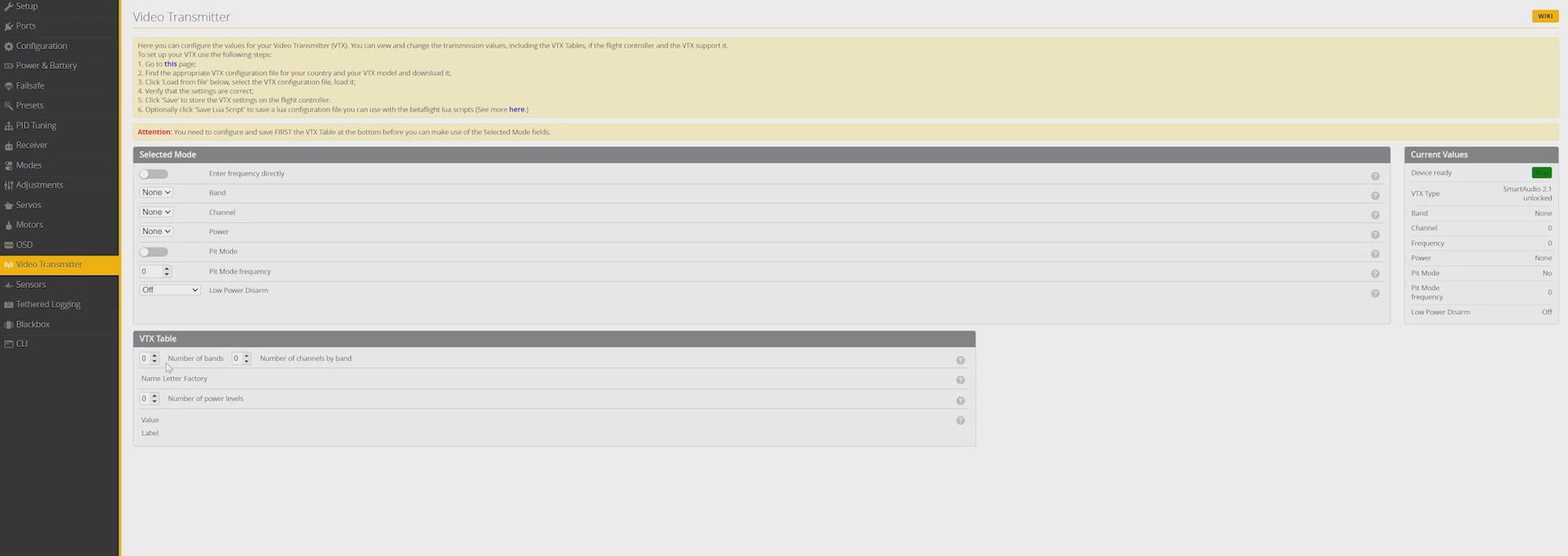
Изначально здесь пустая таблица каналов, и чтобы ее добавить, нужно зайти во вкладку Presets. Выбираем из списка в VTX.
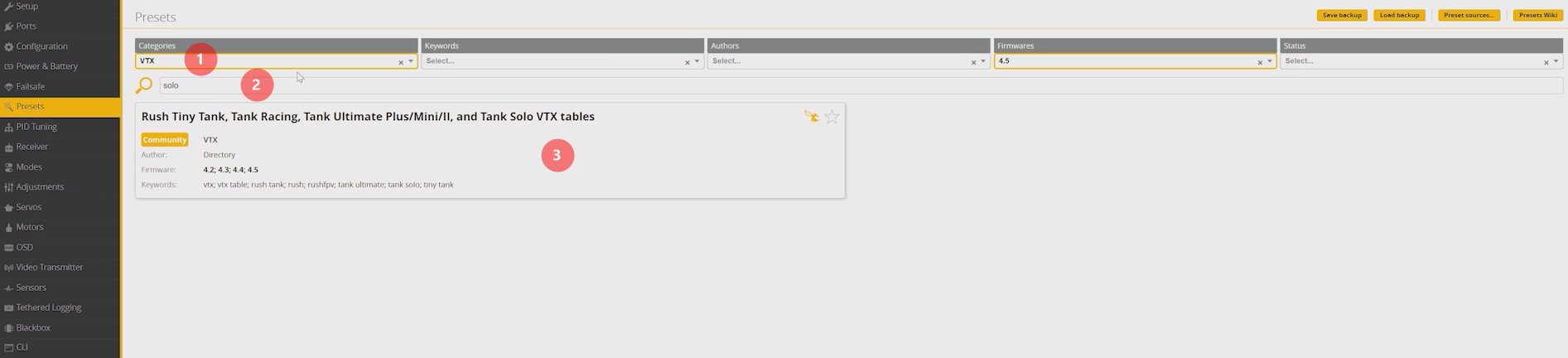
В поиске вбиваем слово Solo. Это название нашего видеопередатчика Rush Tank MAX Solo.
В списке выбираем Tank Solo и нажимаем кнопку Apply.
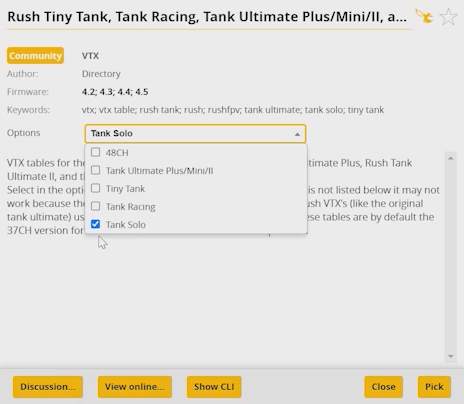
Нажимаем кнопку Save and Reboot.
Готово! Возвращаемся снова на вкладку Video Transmitter. Видим, что у нас появилась табличка с частотами и мощностями.
Например, я хочу летать на канале A1 (Raceband 1). Это можно сделать вручную. Выбираю мощность видеопередатчика на 400 милливатт.
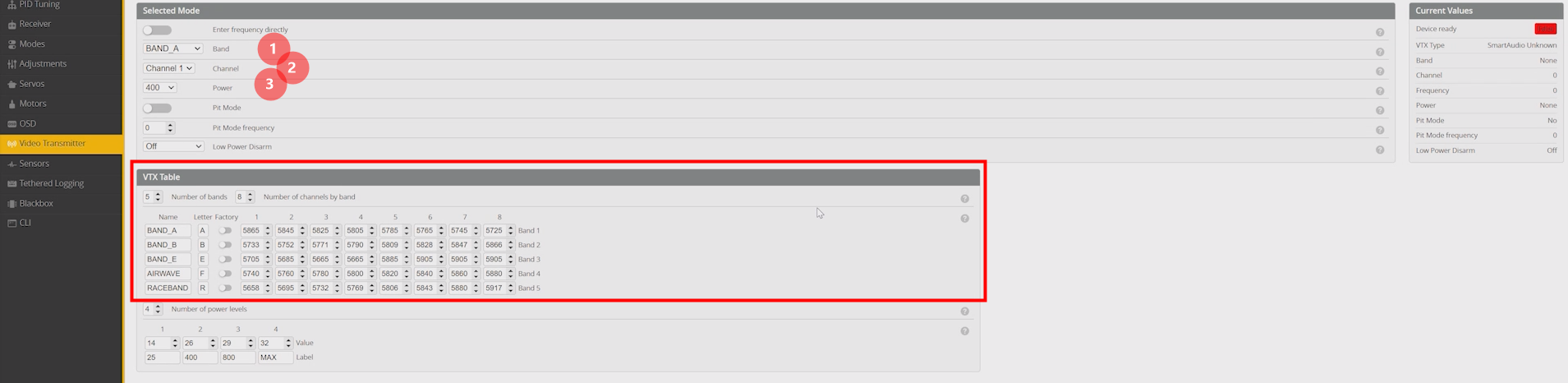
Нажимаю Save.
Готово!
Теперь можно взять FPV очки и посмотреть, работает ли видеопередатчик и отображаются ли на экране параметры, которые мы настроили во вкладке OSD. Для этого нужно подключить аккумулятор к дрону.

Шаг 25: Настройка системы управления сервоприводом (СУС)
Теперь нам нужно настроить сервопривод. Для этого нам нужно зайти во вкладку Receiver и выбрать любой тумблер. Допустим, это будет AUX 2.
Теперь переходим во вкладку Servos. Далее ставим галочку на AUX 2.
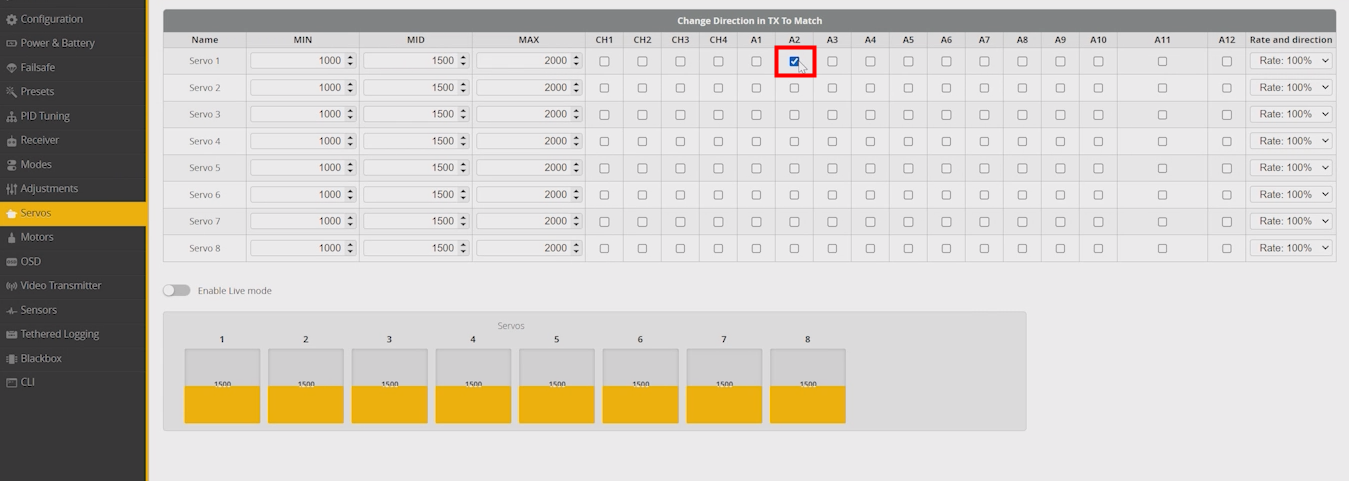
Теперь можем проверить, как работает сервопривод.
Финальная сборка и облет
Шаг 26: Установка верхней пластины и аккумулятора
Теперь нам нужно прикрутить верхнюю пластину к раме.

Выставить ремень для аккумулятора и сам аккумулятор.

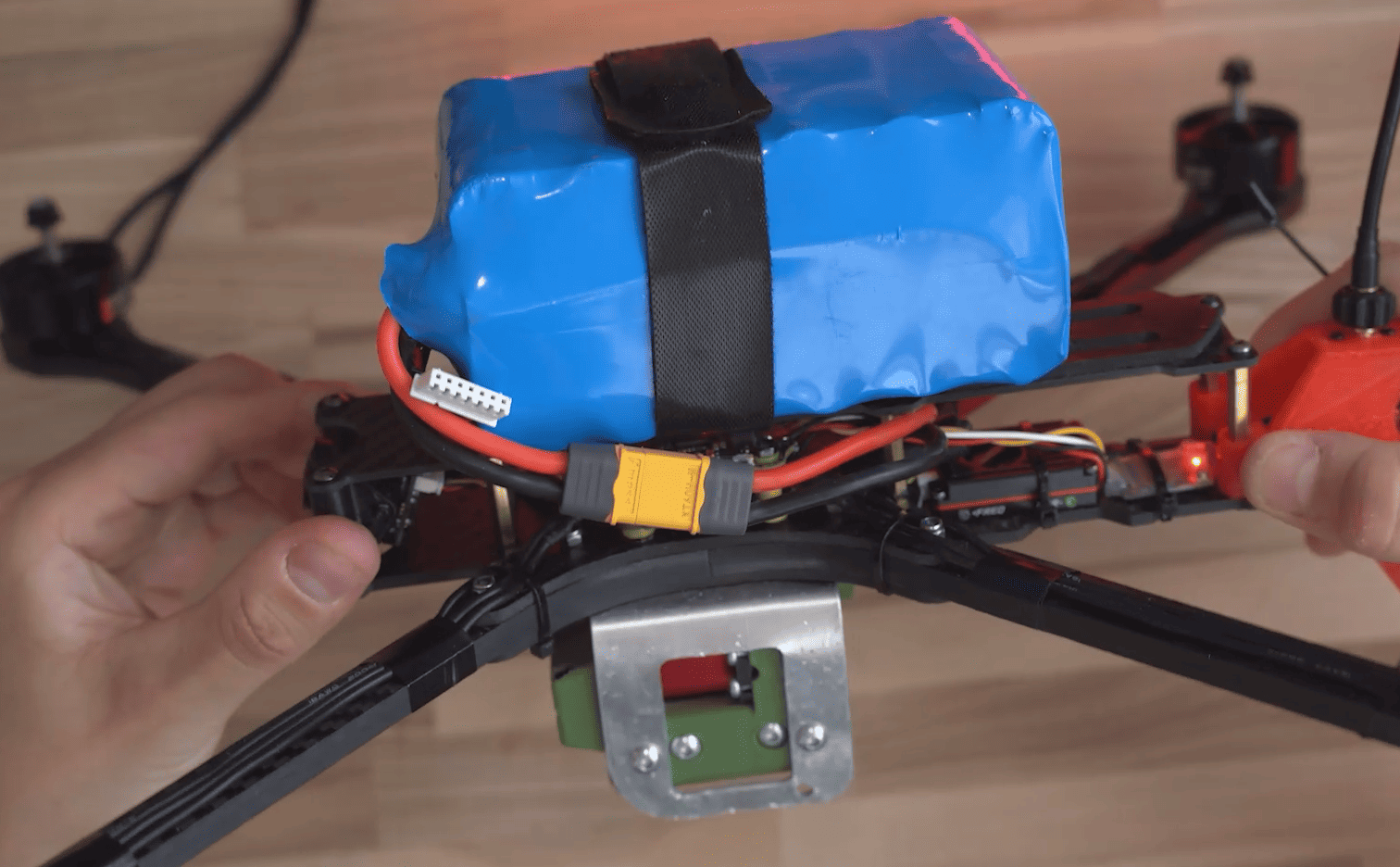
Убедиться, что аккумулятор надежно закреплен и ничего не пережимает.
Готово! Мы с вами настроили дрон. Теперь осталось только его облетать.
Шаг 27: Первый облет
Для облета начинаем летать сначала по площадке в режиме прямой видимости без очков, чтобы понять, ведет ли себя дрон адекватно. Далее, если все работает хорошо, надеваем FPV очки и постепенно даем дрону нагрузку, чтобы оценить его управляемость.
В конце вешаем груз и летаем с ним. Далее испытываем систему управления приводом (сбрасываем груз).
Сборка и облет завершены.
- Обучение Обучение | Курсы
- Понедельник, 13 октября 2025