")
5. Регулятор оборотов двигателя (ESC)
Что такое ESC?
ESC (Electronic Speed Controller — Электронный регулятор скорости) — электронный компонент в виде печатной платы, который управляет скоростью вращения моторов квадрокоптера, их направлением вращения и торможением. Он принимает команды от полётного контроллера и преобразует их в электрические сигналы для управления моторами.

ESC — критически важный компонент FPV-дронов, влияющий на продолжительность и надёжность полёта. От правильного выбора и настройки ESC зависят способность дрона выполнять сложные манёвры, стабильность полёта и общая эффективность энергопотребления.
Взаимодействие с полётным контроллером

Полётный контроллер (Flight Controller) — «мозг» FPV-дрона, собирающий данные с различных датчиков (акселерометр, гироскоп, барометр и др.) и принимающий команды от пульта управления через приёмник.

На основе этих данных полётный контроллер формирует управляющие сигналы для ESC.
Основная функция ESC — управлять скоростью вращения моторов. Управляющие сигналы от полётного контроллера передаются на ESC через специальные кабели и преобразуются в соответствующие команды для электромоторов. Обычно это модулированное напряжение или цифровые последовательности.

ESC управляет частотой вращения моторов, что напрямую влияет на скорость, высоту и направление полёта дрона.
Управление направлением вращения моторов
ESC позволяет изменять направление вращения моторов. Бесколлекторные двигатели (brushless), применяемые в FPV-дронах, имеют три фазы обмоток статора.

ESC управляет подачей электрических импульсов по фазам в определённой последовательности, создавая вращающееся магнитное поле, которое приводит ротор в движение.
Современные ESC поддерживают смену направления вращения моторов через программные настройки прошивки (например, BLHeli32). При необходимости направление можно изменить механически — поменяв местами два из трёх проводов между ESC и мотором.

Однако механический метод менее удобен и применяется реже.
Активное торможение (Active Braking)
Активное торможение — важная функция ESC, обеспечивающая быстрое и точное снижение скорости или полную остановку моторов. Это важно для выполнения сложных манёвров и быстрого отклика на команды полётного контроллера.

Принцип работы — создание обратной электродвижущей силы (back-EMF), которая противодействует вращению ротора. ESC управляет подачей тока на обмотки статора, что ускоряет замедление мотора по сравнению с естественным торможением за счёт внутреннего трения и сопротивления воздуха.
Преимущества активного торможения:
- Быстрая смена направления или остановка моторов, что критично для гонок и фристайла.
- Мгновенное уменьшение скоростей без постепенного торможения.
- Повышение стабильности и предсказуемости полёта.
Защитные функции и энергоэффективность
Современные ESC оснащены защитой от перегрузки, перегрева, а также низкого напряжения, что предупреждает повреждение моторов и самого ESC в критических ситуациях.
Кроме того, ESC оптимизирует энергопотребление моторов, снижая расход батареи и продлевая время полёта.
Протоколы передачи сигналов
Существуют различные протоколы передачи команд от полётного контроллера к ESC. От протокола зависит скорость и точность управления. Основные протоколы:
PWM (Pulse Width Modulation — широтно-импульсная модуляция)
Самый старый и распространённый протокол. Передача скорости управления происходит изменением ширины импульсов сигнала (~50 Гц, период 20 мс). Прост в реализации и совместим со многими устройствами, но имеет относительно низкую частоту обновления, что снижает отзывчивость.
PPM (Pulse Position Modulation — импульсно-позиционная модуляция)
Чаще используется для передачи сигналов от приёмника к полётному контроллеру, но иногда применяется для ESC. Передаёт несколько каналов по одному проводу. Имеет задержки и невысокую скорость обновления.
OneShot
Разработан специально для FPV с повышенной скоростью передачи команд по сравнению с PWM. Например, OneShot125 обновляет команды примерно в 8 раз быстрее, чем PWM.
MultiShot
Более быстрый протокол, чем OneShot, с частотой до 32 кГц для максимально быстрой и точной реакции ESC. Требует совместимого оборудования.
D-Shot
Цифровой протокол, передающий команды в виде цифровых пакетов, что исключает ошибки и не требует калибровки. Существуют версии D-Shot 150, 300, 600, 1200 — цифра обозначает скорость передачи в кбит/с. Обеспечивает высокую точность и возможность передачи телеметрии, но требует современного аппаратного обеспечения.
Выбор протокола зависит от потребностей квадрокоптера. PWM — простой и совместимый протокол для большинства; для скоростных и точных манёвров предпочтительнее D-Shot.
Монтаж ESC 4-in-1 и нумерация моторов
ESC 4-in-1 — одна плата, содержащая 4 ESC, каждый для одного мотора. Плата имеет ориентацию, обозначенную цифрами 1-4, где:
- 4 и 2 — передние (левый и правый);
- 3 и 1 — задние (левый и правый).

Мотор 1 — всегда передний левый для классической развёртки типа «X». По нему можно определить направление вращения моторов.

При неправильной установке платы ESC 4-in-1 (например, не ориентируя «вперёд»), управление дроном будет некорректным — дрон не сможет летать. Это можно исправить путём переназначения моторов в прошивке полётного контроллера (например, в Betaflight).
Направление вращения моторов
Для стабильности полёта моторы квадрокоптера вращаются в противоположных направлениях по диагоналям: одна диагональ вращается по часовой стрелке (CW), другая — против (CCW).
Это позволяет компенсировать реактивный момент моторов и предотвращает вращение дрона вокруг собственной оси, обеспечивая устойчивость и манёвренность.
Схемы вращения пропеллеров: Props-in и Props-out
Props-in (Пропеллеры направлены внутрь)
Мотор 1 (передний левый) и мотор 4 (задний правый) вращаются по часовой стрелке (CW), а моторы 2 и 3 — против часовой (CCW).

Преимущества:
- Поддержка режима «черепашка» (Turtle Mode) для дронов с пропеллерами внизу рамы, позволяющего выталкивать дрон с земли при перевороте.
Недостатки:
- Во время взлёта с земли или песка мелкие частицы могут засасываться внутрь рамы, загрязняя электронику и создавая риск короткого замыкания.
- Грязь и мусор влетает в передние пропеллеры и может попадать на камеру, ухудшая качество видео и ориентацию пилота.
- При столкновениях пропеллеры могут «засасывать» препятствия, нанося больше повреждений.
Props-out (Пропеллеры направлены наружу)
Моторы 1 и 4 вращаются против часовой стрелки (CCW), моторы 2 и 3 — по часовой (CW).

Преимущества:
- Мусор и пыль обдуваются пропеллерами в сторону, противоположную камере, что снижает загрязнение.
- При столкновениях пропеллеры создают отталкивающие потоки, уменьшая повреждения.
Недостатки:
- При взлёте пыль и мелкий мусор могут затягиваться в раму, создавая риск повреждения электроники.
Типы ESC
Сейчас на рынке представлены разные типы ESC:
- AIO (All-In-One) — совмещённые плата полётного контроллера и ESC;
- 4-in-1 ESC — одна плата, управляющая четырьмя моторами;
- 6-in-1, 8-in-1 ESC для гекса- и октокоптеров;
- Отдельные ESC на каждый мотор.
Доминируют ESC 4-in-1 за счёт компактности и удобства установки.

Преимущества 4-in-1 ESC — более централизованное распределение веса и меньший объём проводов, что улучшает отклик дрона. Минус — выход из строя одного ESC требует замены всей платы.
Отдельные ESC на каждый мотор
Каждый ESC управляет одним двигателем.

Преимущества:
- Легче заменить при выходе из строя;
- Лучшее охлаждение за счёт размещения на лучах рамы и открытом потоке воздуха.
Недостатки:
- Большое количество проводов и пайки;
- Увеличение длины проводов неизбежно ведёт к задержкам и потерям;
- Требуется отдельная плата распределения питания (PDB) если нет встроенного в полётный контроллер;
- Сложность монтажа и большее количество точек отказа.
Выбор ESC: напряжение и ток
Выбирайте ESC, поддерживающий напряжение вашего аккумулятора. Например, аккумулятор 4S в заряженном состоянии даёт 16.8 В, значит ESC должен работать при таком напряжении без повреждений.

Большинство современных ESC поддерживают от 3S до 6S LiPo аккумуляторов.
У ESC 4-in-1 ток указывается на каждый канал — то есть на один мотор.

Для безопасности рекомендуется брать ESC с номинальным током минимум на 10 А выше, чем максимальный ток двигателя по паспорту. Например, двигатель с потреблением 20 А требует ESC на 30 А.

Это позволяет защитить ESC от перегрева и выхода из строя при резких скачках нагрузки.
Основные параметры ESC:
- Номинальный ток (Continuous Current): максимальный ток, который ESC может продолжительно выдерживать;
- Пиковый ток (Peak/Burst Current): кратковременный максимум, обычно до 10 секунд.
Выбирать ESC с чрезмерным запасом не нужно — это увеличит вес и цену, а недостаток запасов приведёт к выходу из строя.
Подключение ESC к полётному контроллеру
Для подключения ESC к полётному контроллеру используются следующие сигналы:
- GND (земля)
- 5V (питание +5 В)
- Tele/TX — телеметрия
- Cur — измерение тока
- S1, S2, S3, S4 и т.д. — сигнальные линии управления моторами
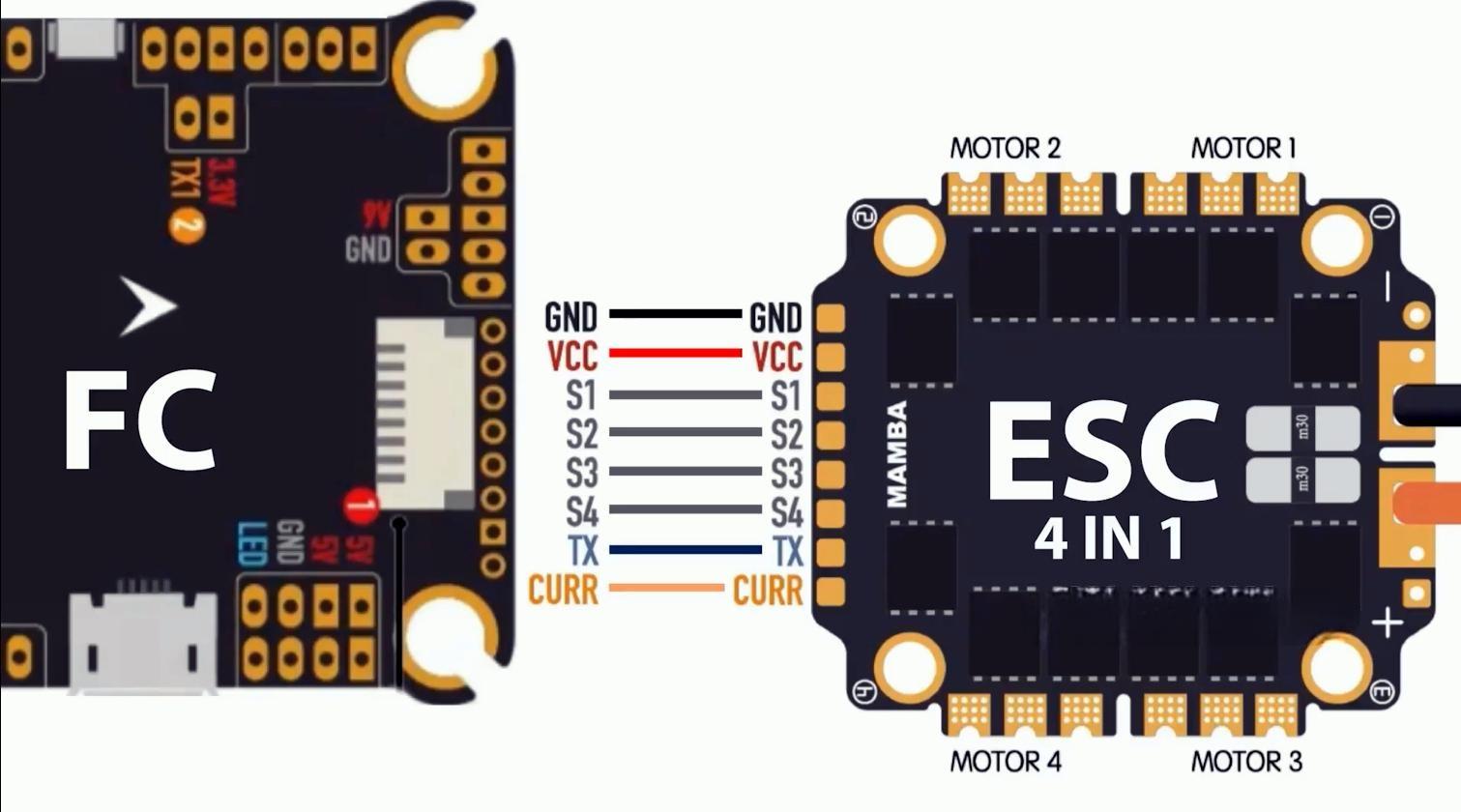
Если контроллер имеет 4 сигнальных выхода, к нему можно подключить только 4 мотора. Например, у ESC 8-in-1 должно быть 8 сигнальных выходов (S1–S8) и соответствующие линии питания и телеметрии.
Монтажный размер ESC
ESC обычно располагают под полётным контроллером и крепят стопкой. Для удобства сборки и надёжности размеры монтажных отверстий ESC должны совпадать с размерами полётного контроллера.

Популярные размеры ESC 4-in-1: 35×35 мм, 25×25 мм, 20×20 мм. Чем больше размер — тем выше мощность и долговечность благодаря крупным транзисторам MOSFET. ESC не должны выступать за пределы рамы, чтобы избежать попадания грязи и короткого замыкания.
Внутреннее устройство ESC и роль прошивки
Взаимодействие всех компонентов ESC управляется прошивкой — от неё зависит эффективность и надёжность работы.

- MCU (микроконтроллер): «мозг» ESC, на который загружается прошивка;
- Gate drivers: управляют открытием/закрытием MOSFET-транзисторов по команде MCU;
- MOSFET транзисторы: регулируют ток, подаваемый на мотор;
- Стабилизатор напряжения (LDO): питает MCU стабильным напряжением;
- Датчик тока: следит за силой потребляемого тока для защиты ESC;
- Фильтрующие конденсаторы: сглаживают пульсации напряжения.
Прошивка ESC отвечает за управление всеми этими элементами, что даёт возможности для улучшения поведения моторов и повышения энергоэффективности.
Прошивки ESC
Сейчас распространены четыре основные прошивки:
- BLHeli S — 8-битные процессоры SiLabs F330/F39x, открытый код, не поддерживает двунаправленный DShot, позволяет настраивать RPM-фильтры в Betaflight. Поддержка прекращена, многие переходят на BlueJay.
- BlueJay — прошивка для оборудования BLHeli S с расширенными возможностями: двунаправленный DShot, высокие частоты PWM (24, 48, 96 кГц), телеметрия, мелодии запуска и подсветка.
- BLHeli 32 — 32-битные ARM Cortex-M0, закрытый код, улучшение по сравнению с S, но дороже. С 2024 года лицензии сняты, обновления прекращены.
- AM32 — открытый код для ARM-процессоров, конкурент BLHeli32 с улучшенной эффективностью. Поддерживает обновления через Betaflight Pass-Thru, двунаправленный DShot, телеметрию CASE и защиту от заклинивания моторов.
Перепрошивка ESC
Можно купить ESC с нужной прошивкой или перепрошить самостоятельно:
- BLHeli S → BlueJay;
- BLHeli 32 → AM32.
Важно: перепрошивка на BLHeli S или BLHeli 32 является односторонней — вернуться к оригиналу нельзя.
Чек-лист по выбору ESC для FPV-дрона
| Категория | Проверка |
|---|---|
| Основные параметры | |
| Напряжение | ESC поддерживает напряжение вашей батареи:
|
| Ток | Номинальный ток ESC соответствует потребностям:
|
| Тип ESC | Выбран подходящий тип:
|
| Протоколы передачи сигналов | Выбран подходящий протокол:
Рекомендация: для скоростных и точных манёвров предпочтителен D-Shot |
| Проверка совместимости | |
| С полётным контроллером | Количество сигнальных выходов совпадает с количеством моторов:
|
| С двигателями | ESC соответствует характеристикам двигателей:
|
| Монтажные размеры | Размеры ESC совпадают с рамой и полётным контроллером:
|
| Схема вращения пропеллеров | Учтена схема вращения (Props-in или Props-out):
Выбор зависит от предпочтений и типа рамы |
| Рекомендации под стиль полёта | |
| Гонки | |
| Протокол передачи | Высокоскоростной протокол (D-Shot 600/1200 или MultiShot) |
| Активное торможение | Обязательно включено (критично для резких манёвров) |
| Ток | Высокий номинальный ток (35-50 А) для максимальной отдачи |
| Прошивка | BLHeli32, AM32 или BlueJay для максимальной скорости реакции |
| Фристайл | |
| Протокол передачи | MultiShot или D-Shot 300 |
| Активное торможение | Умеренное (для плавных манёвров) |
| Ток | Средний номинальный ток (25-35 А) |
| Прошивка | AM32 или BlueJay с возможностью настройки RPM-фильтров |
| Дальние полёты | |
| Протокол передачи | OneShot или PWM (достаточно для плавных полётов) |
| Энергоэффективность | Высокая энергоэффективность (для увеличения времени полёта) |
| Ток | Номинальный ток 20-30 А (в зависимости от двигателя) |
| Прошивка | BLHeli S или BlueJay с оптимизацией энергопотребления |
| Дополнительные проверки | |
| Прошивка | Выбрана подходящая прошивка:
|
| Телеметрия | Учтена необходимость телеметрии:
|
| Защитные функции | Проверены защитные функции:
|
| Охлаждение | Учтено охлаждение:
|
| Вес и компактность | Соотношение веса и мощности:
|
| Финальная проверка | |
| Правильная ориентация | ESC 4-in-1 установлен правильно (цифра 1 соответствует заднему правому мотору) |
| Подключение проводов | Проверено подключение проводов:
|
| Тест моторов | Проверена работа всех моторов:
|
| Температура | Проверена температура ESC после короткого полёта:
|
| Вибрации | Убедился в отсутствии вибраций при работе ESC |
| Настройки в Betaflight | Проверены настройки в полётном контроллере:
|
- Обучение Обучение | Курсы
- Четверг, 16 октября 2025