


6. Двигатели
Двигатели для FPV-дронов — ключевой компонент, влияющий на маневренность, эффективность и общее поведение дрона в полёте. Выбор правильных двигателей зависит от типа дрона, стиля полёта и личных предпочтений пилота.

Неправильный выбор двигателя может привести к снижению эффективности дрона, недостаточной тяге, несовместимости с ESC или аккумулятором. Всё это влечёт за собой дополнительные расходы и испорченное настроение.
Перед выбором двигателя важно обратить внимание на следующие характеристики:
- Определиться с типом и размером двигателя, а также манерой управления.
- Решить, нужно ли летать
далекоилибыстро— от этого зависят форма рамы, размер двигателей, энергоэффективность и тяговые характеристики. - Подобрать размер пропеллера относительно размеров рамы.
- Обратить внимание на размеры статора двигателя и его вес.
- Учитывать вес дрона — от потребления тока двигателями зависит правильный подбор ESC и аккумулятора.
- KV-рейтинг — определяет количество оборотов двигателя в минуту на 1 вольт.
- Количество полюсов и магнитов двигателя для эффективной работы.
- Монтажные размеры двигателя и совместимость с рамой.
Типы двигателей для FPV-дронов
Для FPV-дронов используются два типа двигателей — щеточные (Brushed) и бесщеточные (Brushless).
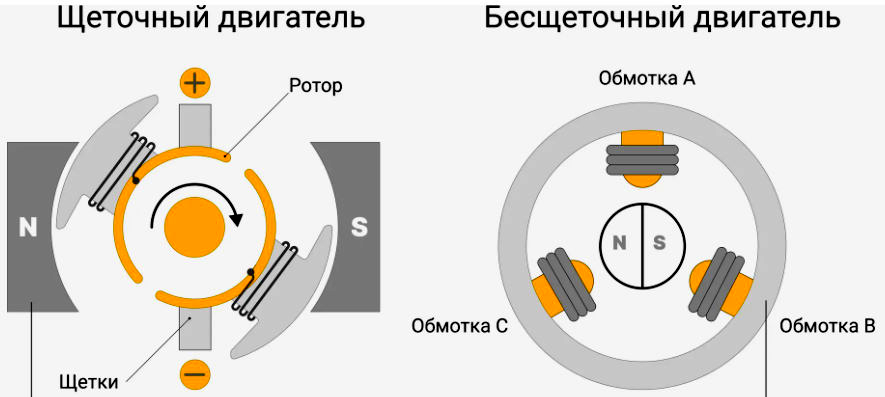
Коллекторные двигатели (Brushed):
Двигатели Brushed применяются редко, в основном в игрушечных дронах.
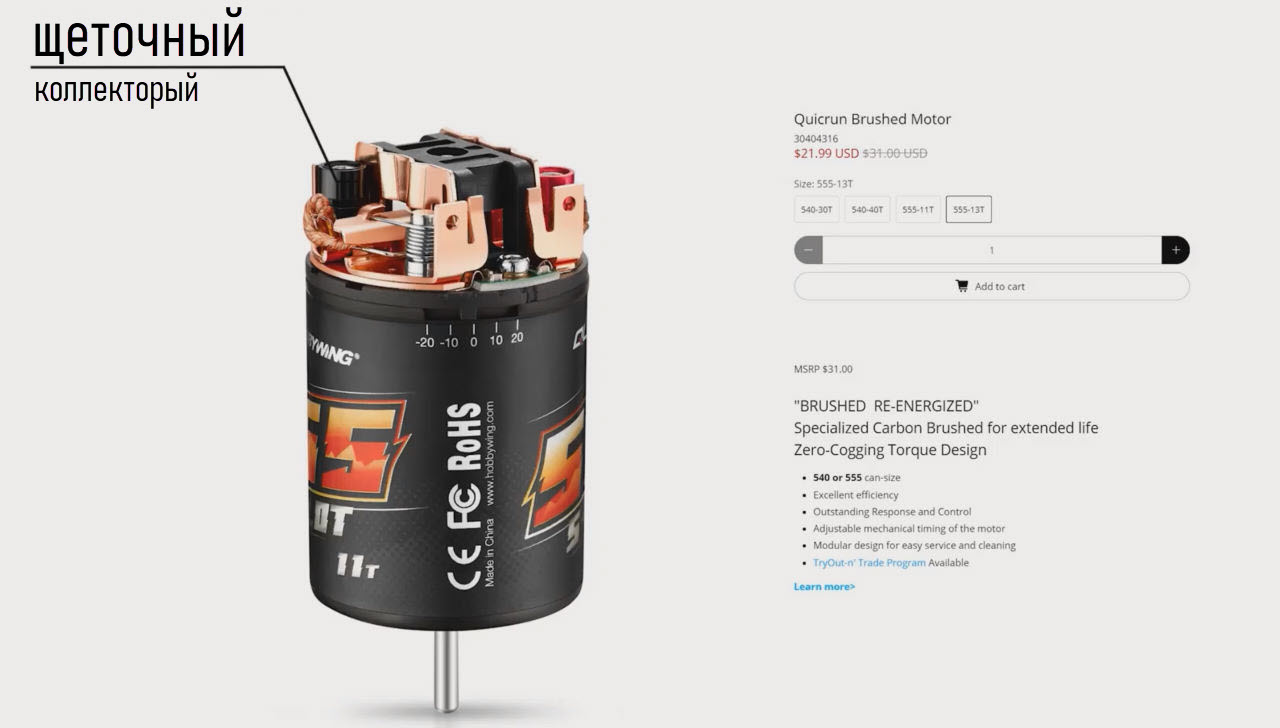
- Простая конструкция снижает стоимость производства и ремонта.
- Лёгкость управления при помощи простых ESC удешевляет систему.
- Обычно используются в миниатюрных и бюджетных моделях, где высокая производительность не требуется.
- Основной недостаток — быстрый износ щёток, требующий регулярного обслуживания.
- Низкая эффективность, негативно влияющая на время полёта и производительность.
Бесколлекторные двигатели (Brushless):
Наиболее распространённый тип двигателей для FPV-дронов, особенно профессиональных.
- Сложная конструкция и принцип работы, обеспечивающие высокую эффективность и надёжность.
- Работают за счёт взаимодействия магнитного поля, создаваемого обмотками статора, и постоянных магнитов ротора.
- Управляются ESC, регулирующим подачу тока и направление для вращения ротора.
- Характеризуются высокой эффективностью, что позволяет дрону летать дольше на одном заряде.
- Отсутствие щёток уменьшает износ и потребность в обслуживании, повышая долговечность.
- Способны работать на высоких оборотах, что важно для скорости и точности управления FPV-дронами.
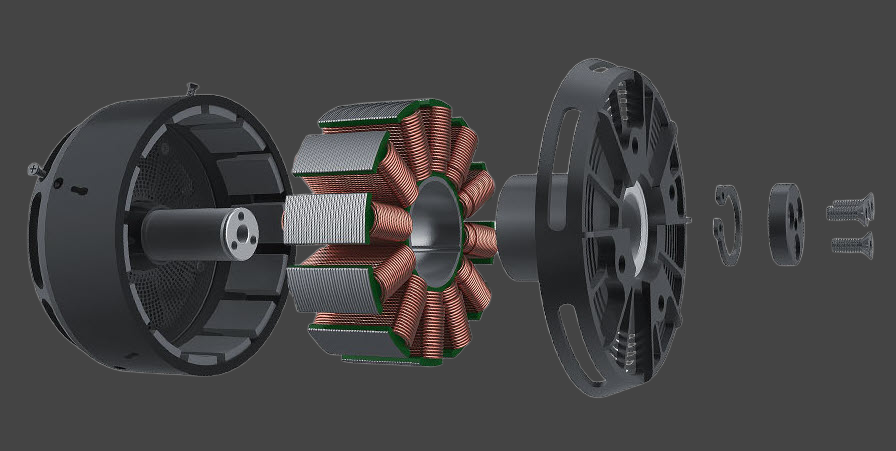
Конструкция бесколлекторного двигателя
Бесколлекторный двигатель состоит из двух основных частей:

Статор
Статор — неподвижная часть двигателя, крепящаяся винтами к раме. Обычно корпус статора изготовлен из алюминия или другого лёгкого металла.

В статор запрессованы подшипники для вращения вала ротора.
Сердечник статора состоит из тонких листов электротехнической стали, соединённых вместе.

Статор имеет три фазы медной проволоки, покрытой лаком, намотанные на сердечник.
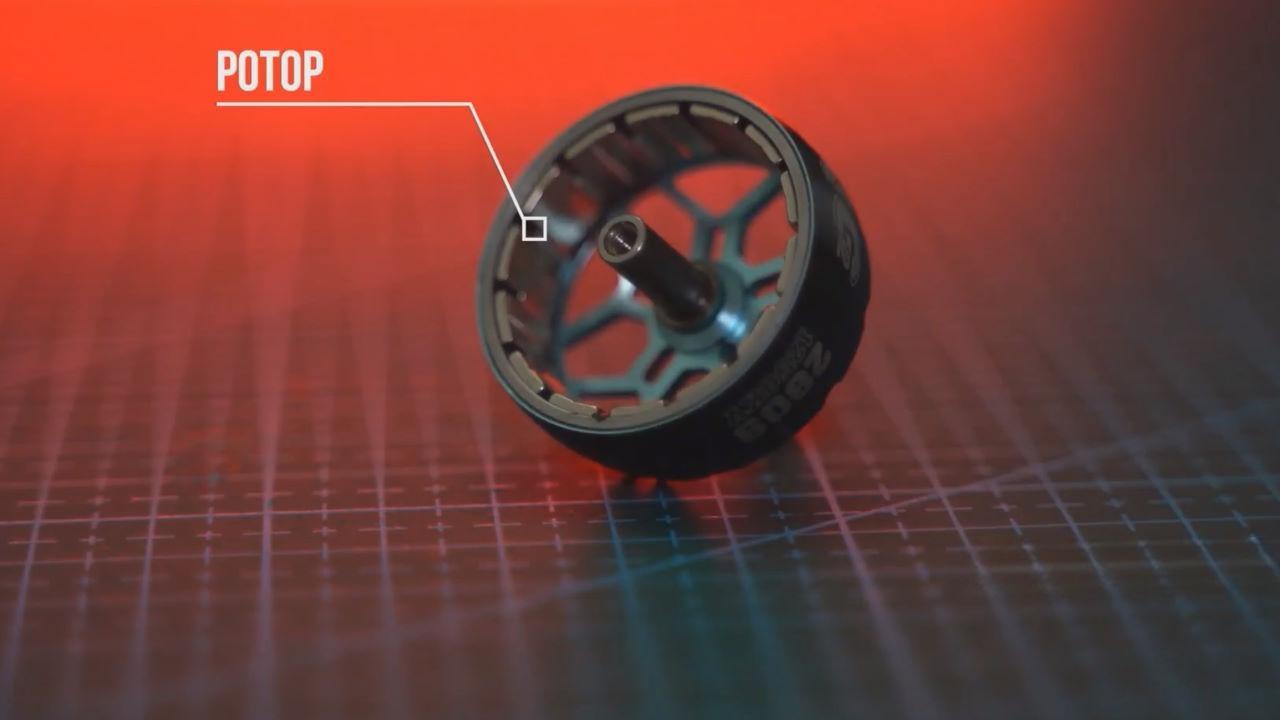
Ротор
Ротор — подвижная часть двигателя, вращающаяся под воздействием магнитного поля статора.
Внутри ротора магниты закреплены эпоксидной смолой, расположены по кругу и взаимодействуют с полем статора.
Корпус ротора служит защитным кожухом для магнитов и обмоток, обычно изготовлен из алюминия.
Некоторые роторы имеют конструкцию, напоминающую мини-вентиляторы, для дополнительного охлаждения.
В центре ротора расположен вал, который вращается на подшипниках и передаёт вращающий момент на пропеллер.

При вращении ротора электрическая энергия преобразуется в механическую, обеспечивая работу двигателя.
При перегреве или сгорании двигателя чаще всего повреждаются обмотки статора.

Обозначения на двигателях
На корпусе ротора обычно наносится маркировка с названием производителя и техническими характеристиками.

Пример: Xing-E PRO — название бренда; номер 2207 обозначает размеры статора: первые две цифры — диаметр 22 мм, последние две — высоту 07 мм.
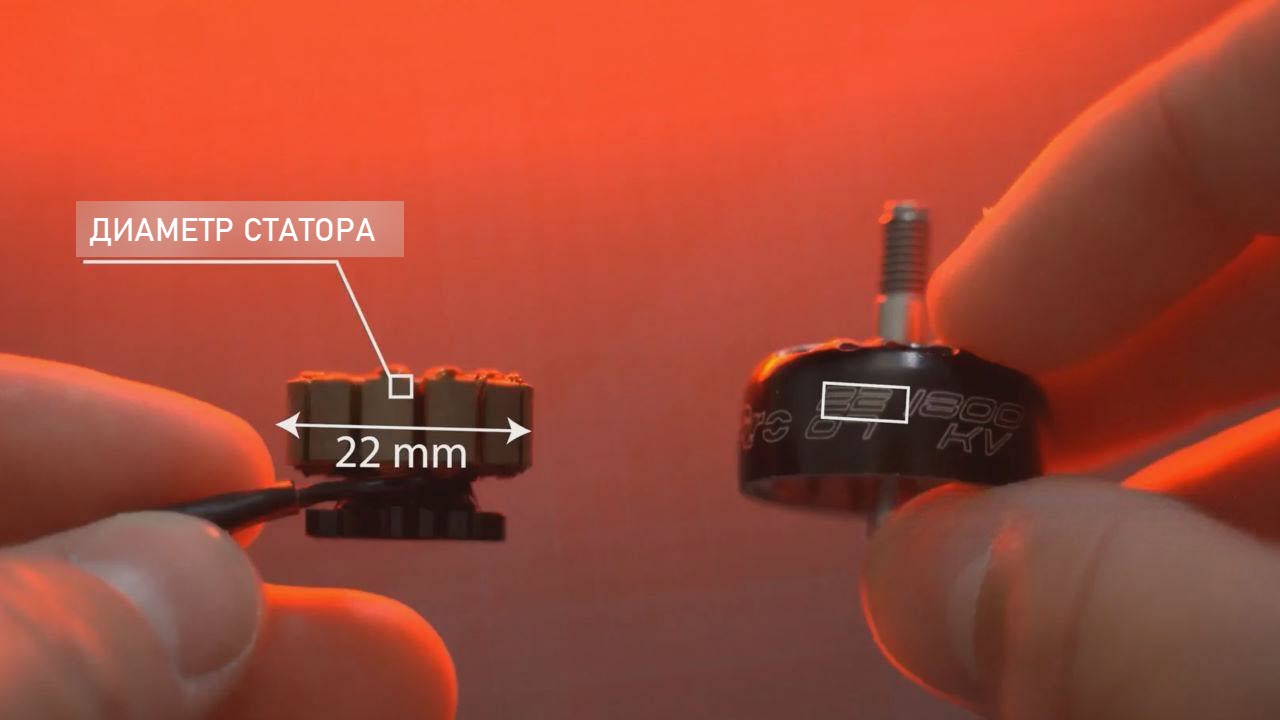
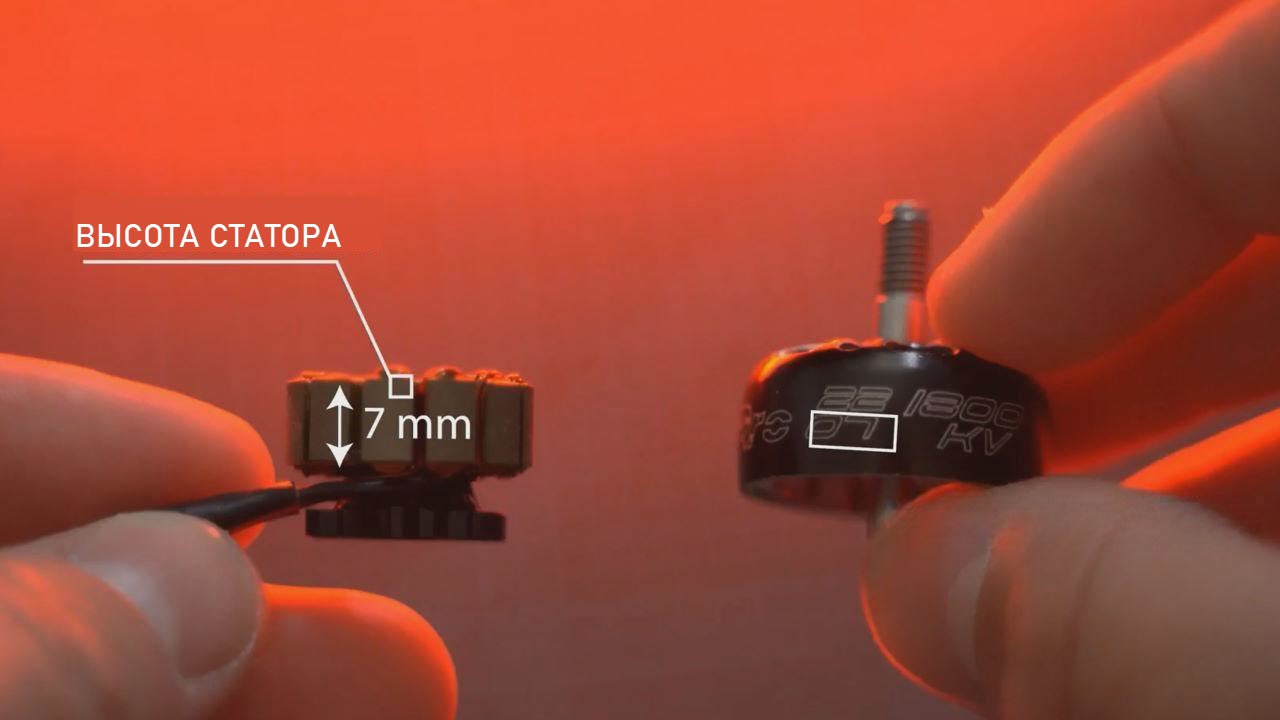
Важно не путать размеры статора с размерами ротора — именно размер статора измеряется этими цифрами.
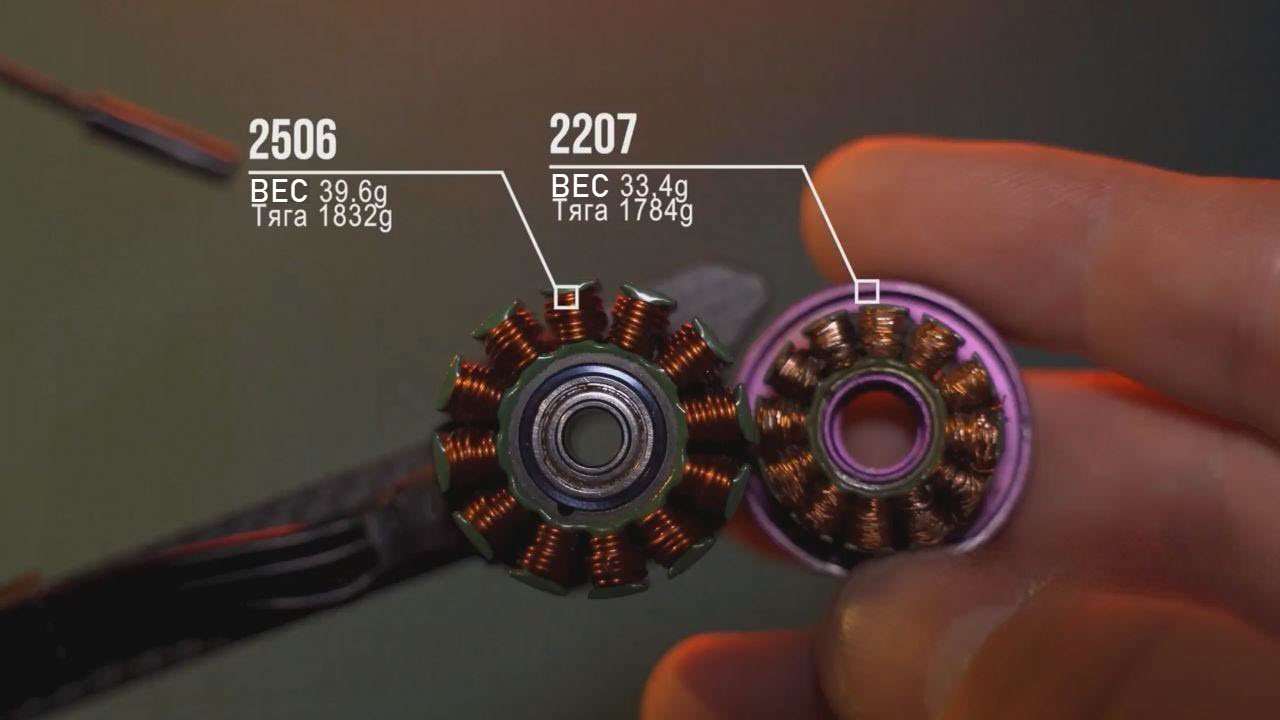
Увеличение размеров статора повышает объём, размеры магнитов и обмоток, увеличивая крутящий момент и тягу за счёт большего потребления тока.
Недостатком является больший вес двигателя и увеличенная инерция вращения, что снижает отзывчивость.
Широкие двигатели лучше охлаждаются благодаря большей площади поверхности.
Температура двигателя напрямую влияет на эффективность: при нагреве магнитное поле уменьшается, ухудшая работу мотора.
Выбор ширины и высоты статора — баланс между отзывчивостью и охлаждением, зависящий от стиля полёта.
Например, для медленных полётов с тяжёлой камерой лучше выбирать широкий статор, для гонок и фристайла — более высокий.
Крупные статорные размеры не всегда означают лучшее — мотор 2207 с пропеллером 5 дюймов может быть эффективнее более тяжёлого 2506 с тем же винтом.
Двигатели с высоким крутящим моментом обеспечивают быструю смену оборотов и меньшие вибрации.
Крутящий момент зависит от:
- размера статора;
- материала;
- типа магнитов;
- качества медной обмотки;
- конструкции двигателя;
- воздушных зазоров;
- количества полюсов.
Расчёт объёма статора
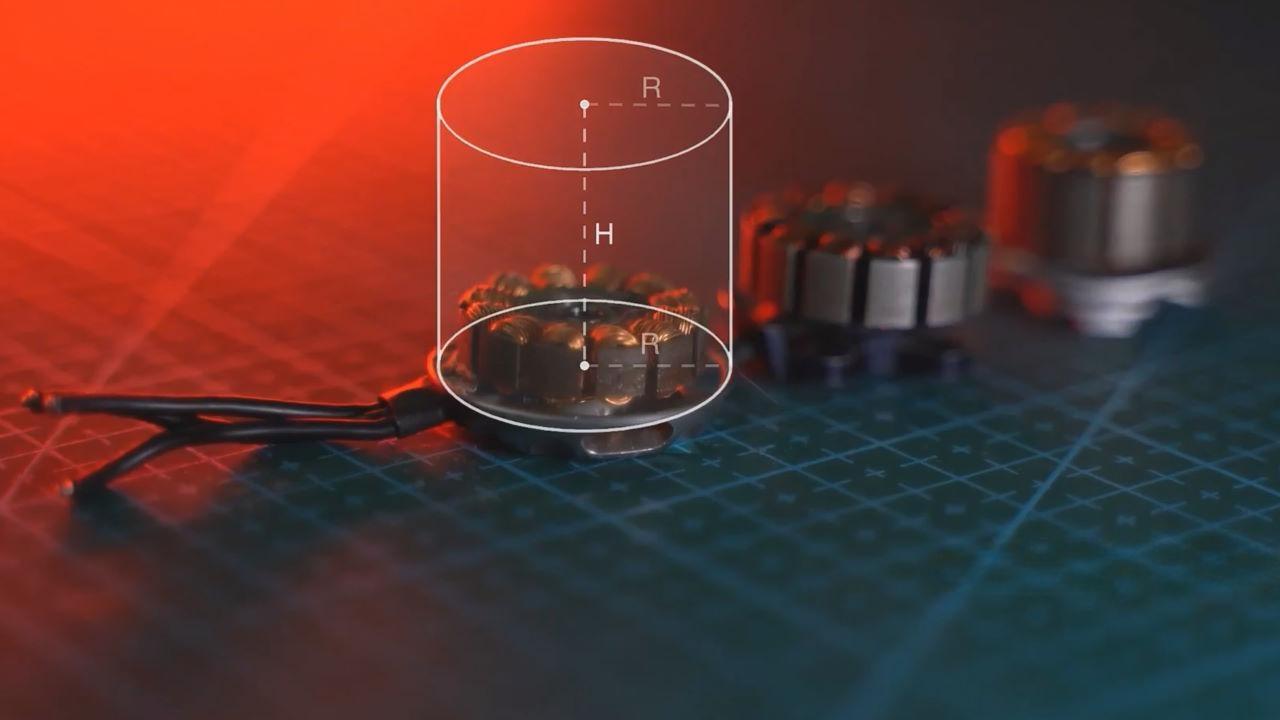
Объём статора рассчитывается по формуле объёма цилиндра:
V = π × (R/2)² × H,
где V — объём цилиндра, π = 3.14, R — диаметр статора, H — высота, размеры в миллиметрах.
Для двигателя 2207 объём получится около 2659 мм³, для 2306 — около 2492 мм³; у 2207 крутящий момент выше за счёт большего объёма статора.
При выборе двигателя важно учитывать соотношение объёма статора и веса — более лёгкий мотор с тем же объёмом эффективнее.
Размер двигателя выбирается с учётом типа дрона:
- 1103–1105 — микродроны;
- 1404–1507 — лёгкие и средние;
- 2204–2306 — стандарт для 5-дюймовых дронов;
- 2507 — большие и тяжёлые дроны.
Особенности выбора двигателя по стилю полёта
Лёгкие дроны требуют меньшей подачи газа и крутящего момента, что позволяет использовать компактные и лёгкие двигатели.
Менее мощные двигатели с меньшим крутящим моментом подходят, если важна плавность, а не реактивность.
Двигатели с высоким крутящим моментом способны очень быстро менять обороты, что иногда ощущается как рывки и менее плавное управление.
Высокий крутящий момент может создавать скачки напряжения и электрические помехи, ухудшая работу гироскопа и стабильность полёта.
KV-рейтинг и обороты двигателя
Число с индексом KV обозначает количество оборотов в минуту (RPM) на 1 Вольт без нагрузки (без установленного винта).
Например, 1800KV означает 1800 оборотов в минуту при подаче 1 В.
Если подать 20 В — получится 36 000 оборотов в минуту без нагрузки.

Для батареи 6S (25.2 В) обороты составят около 45 360 RPM.
При разряде батареи напряжение падает, соответственно уменьшаются обороты (например, с 25.2 В до 21.6 В обороты падают примерно на 15%).
С установленным винтом обороты значительно ниже из-за сопротивления воздуха.
Дроны на 6S летают быстрее и манёвреннее, но обычно имеют чуть меньшее время полёта, чем на 4S, где дрон легче и эффективнее расходует энергию.
Комбинация KV и размера пропеллера
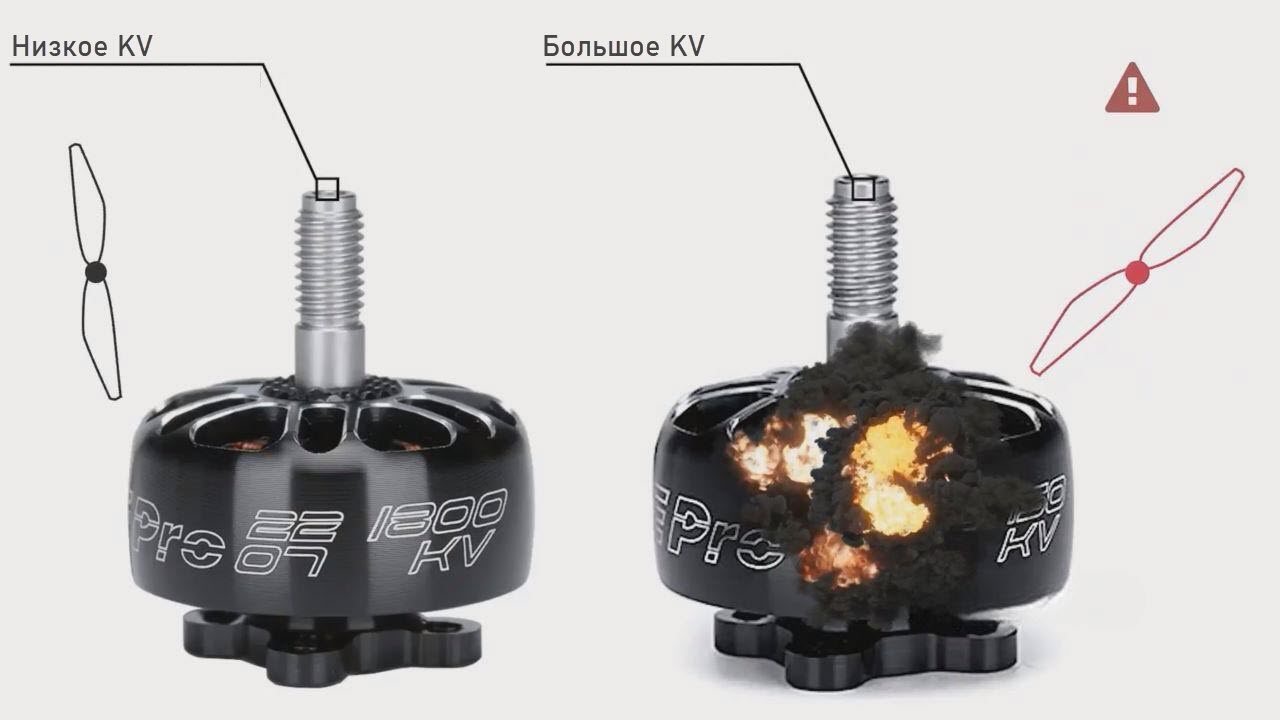
Двигатели с высоким KV работают быстрее, генерируют большую удельную тягу, но потребляют больше тока и сильнее нагреваются.
Большие пропеллеры лучше работают с низким KV, маленькие и лёгкие — с высоким KV.

Если поставить двигатель с высоким KV на слишком большой винт, он будет перегружен, будет потреблять много тока и перегреваться.
KV зависит от количества витков намотки — больше витков означает ниже KV, меньше витков — выше KV.
KV не влияет напрямую на крутящий момент, но влияет на константу крутящего момента — двигатель с высоким KV требует большего тока для создания крутящего момента.
Двигатель с высоким KV при одинаковой скорости менее энергоэффективен и требует лучшего охлаждения.
При проектировании дрона выбирайте KV с учётом задач:
- для дальних полётов важна энергоэффективность и низкий KV;
- для гонок — высокая скорость и более высокий KV.
Влияние веса двигателя на управление
Тяжёлые мощные двигатели увеличивают инерцию и требуют большего крутящего момента для изменения положения дрона.
Это снижает отзывчивость при быстрых манёврах, например, в фристайле или гонках.
Для спокойного полёта вес двигателя менее критичен.
Температура и долговечность двигателя
Температура сильно влияет на работу бесщеточных двигателей — при нагреве снижается магнитное поле, что ухудшает производительность и сокращает срок службы.
Перегрев вызывается длительной работой на максимуме газа или неправильными настройками прошивки.
Хорошее охлаждение — залог долговечной и стабильной работы.
Вибрация и шумы двигателей
Двигатель с плохим балансом или низким качеством вызывает вибрации, которые мешают контроллеру и усложняют его настройку.
Также вибрации создают электрические помехи, влияющие на гироскоп.
Диаметр вала двигателя
Вал двигателя — часть, к которой крепится пропеллер.

Большинство бесщеточных двигателей для винтов диаметром 3–7 дюймов имеют диаметр вала 5 мм.
Это значит, что пропеллер должен иметь отверстие диаметром 5 мм.
Расчёт тяги и соотношение тяги к весу
Тяга — ключевой параметр, определяющий скорость, манёвренность дрона и возможность нести дополнительную нагрузку (камеру, аккумулятор и др.).
Минимальная суммарная тяга всех двигателей должна быть не менее чем в два раза больше веса дрона.
Недостаточная тяга ухудшает управляемость и повышает риск перегорания двигателей.
Для расчёта тяги:
- Определите характеристики двигателя: бренд, размер статора, KV.
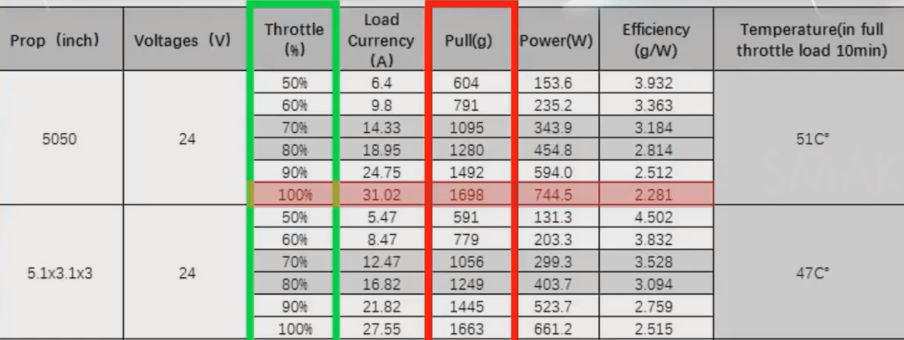
- Найдите таблицу тестов производителя с указанием тяги на определённом уровне газа и винтом.
- Определите тягу на уровне газа, при котором планируете летать.
- Умножьте тягу одного двигателя на количество двигателей (обычно 4).
Пример: двигатель выдаёт 1700 грамм тяги на 100% газа. Четыре двигателя дают 6800 грамм общей тяги. Вес дрона — 1000 грамм.
Соотношение тяги к весу: ~ 7:1 (тяга : масса).
Для гоночных дронов рекомендуются соотношения 10:1 или даже 14:1, для фристайла — минимум 5:1, главное — не менее 2:1.
Большое соотношение делает дрон манёвреннее, но сложнее в управлении, особенно для новичков.
Для спокойного полёта рекомендуется соотношение не менее 4:1.
Монтаж и совместимость двигателя с рамой и ESC
Проверяйте монтажные отверстия для установки двигателя на раму. Наиболее распространённые схемы — 16×16 мм и 19×19 мм.

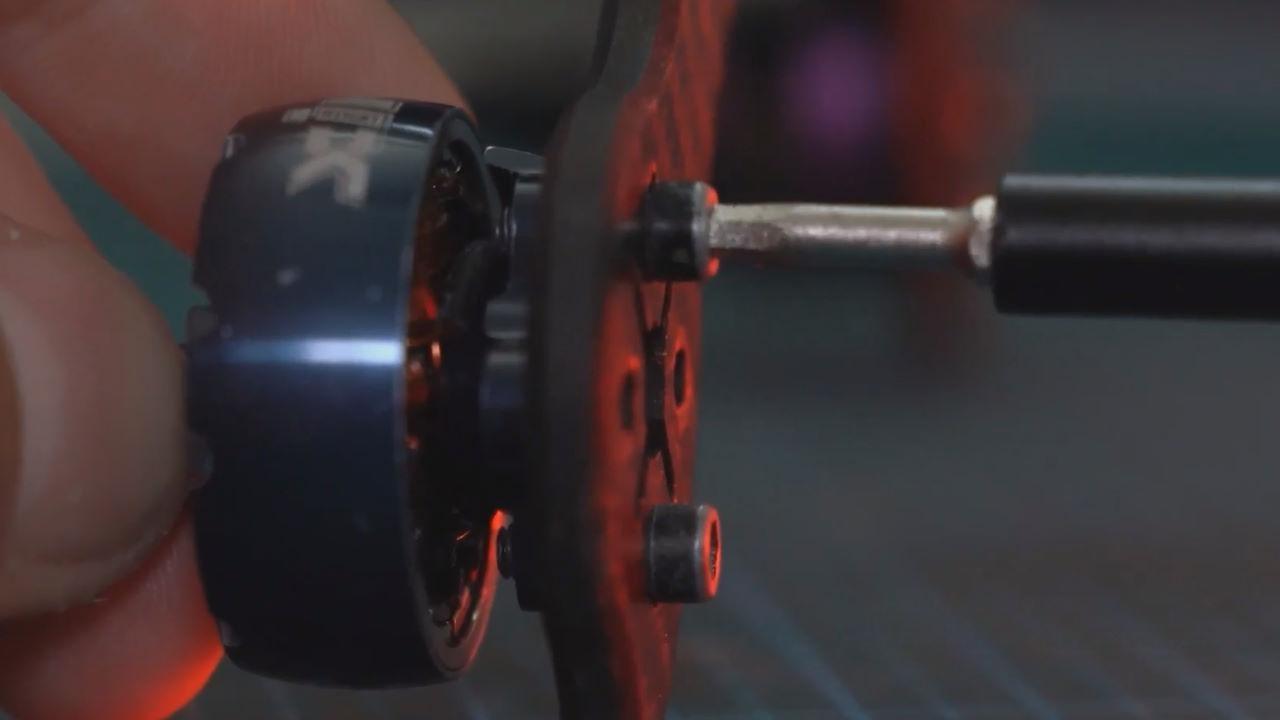
Винты следует закручивать аккуратно, чтобы не повредить обмотки статора — при монтаже измеряйте расстояние от винта до обмоток.
Подбирайте ESC с запасом по току — ESC должен выдерживать потребление тока двигателей, учитывая номинальный и пиковый токи.
Номинальный ток — среднее потребление тока при обычном уровне газа (например, 50%).
Максимальный ток по спецификациям указан при 100% газа без установленного пропеллера.
Во время резких манёвров ток может резко вырасти (пиковый ток), поэтому запас ESC должен быть не менее +10А от максимального значения.
Количество полюсов и магнитов (например, 12n-14p)
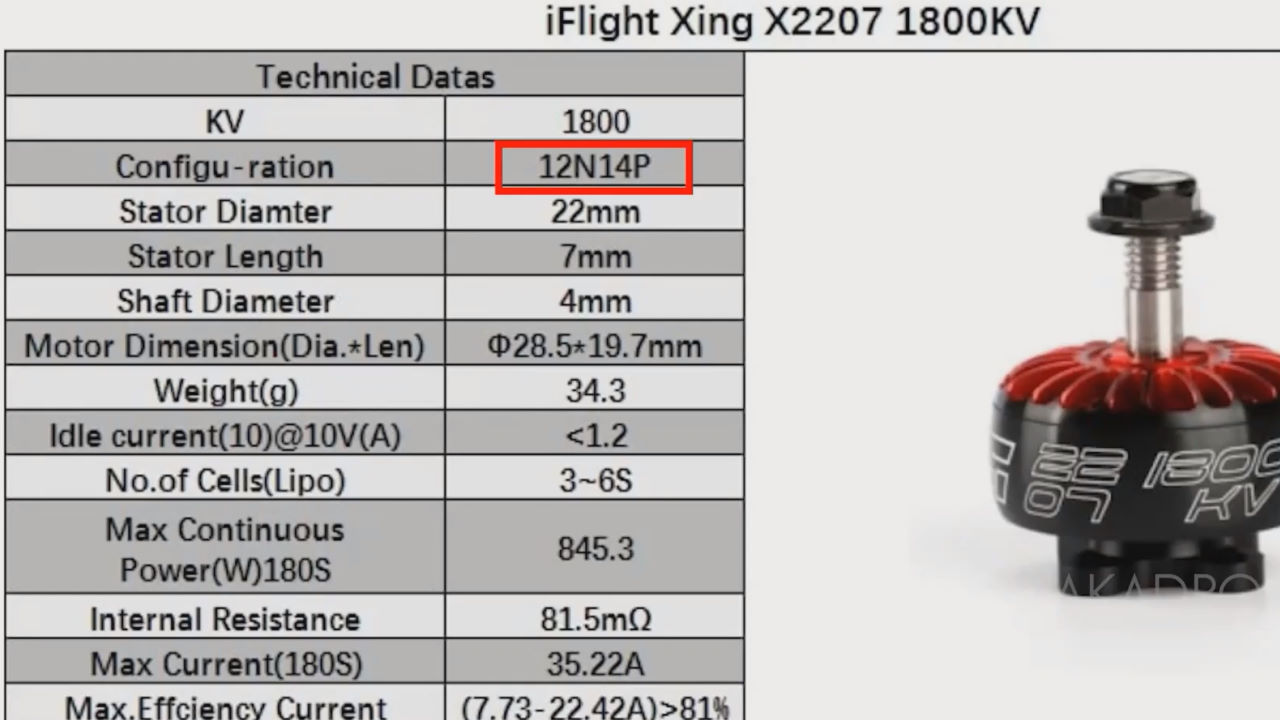
Цифра перед «n» — количество электромагнитных полюсов в статоре.
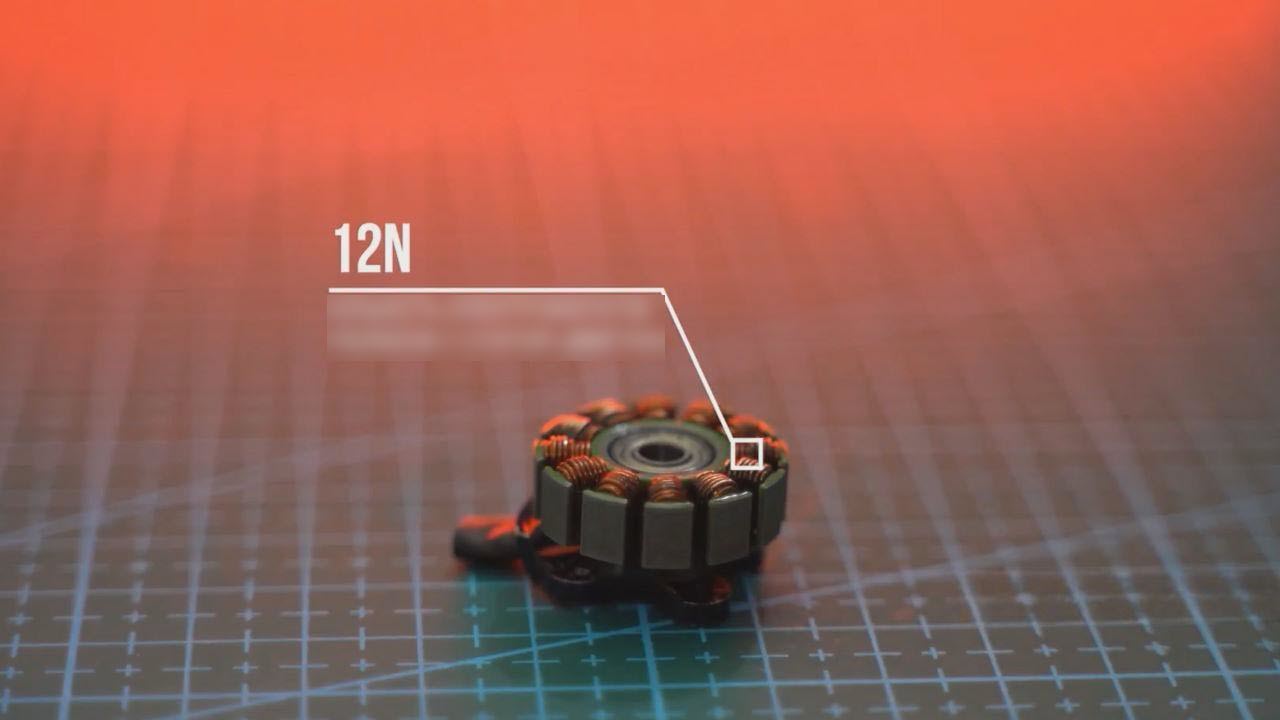
Цифра перед «p» — количество постоянных магнитов в роторе.
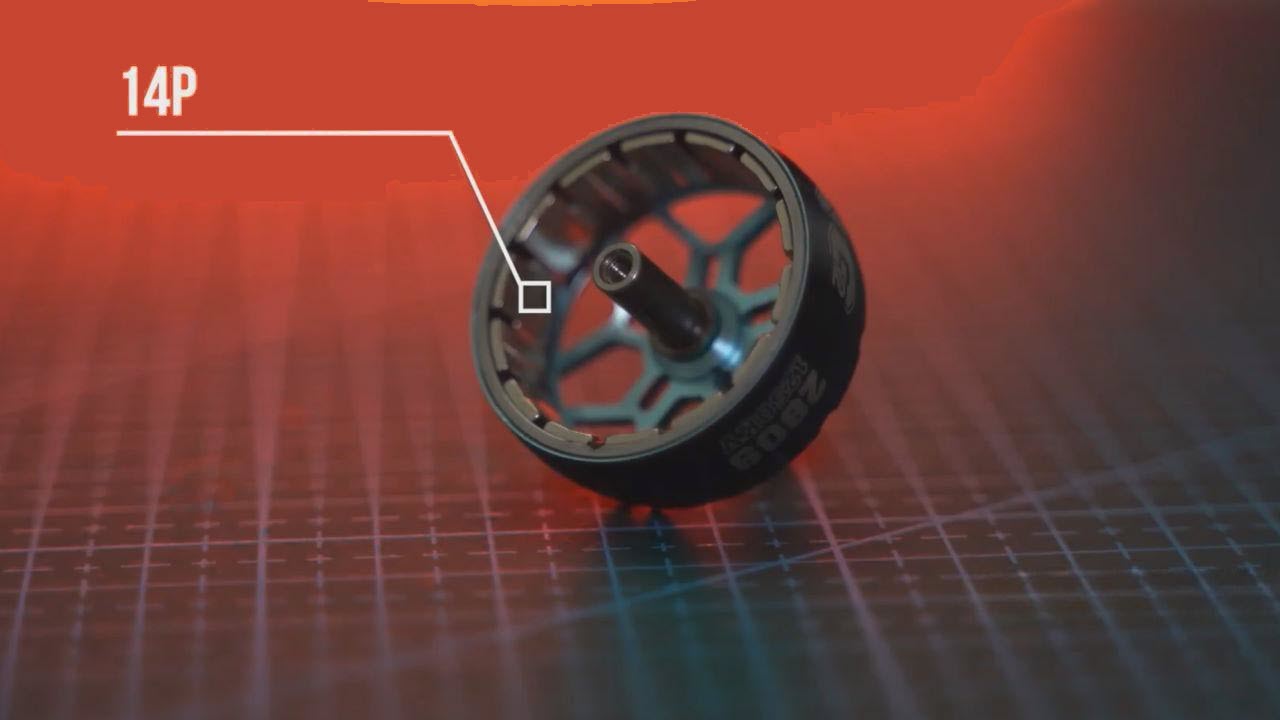
Большее количество полюсов обеспечивает более плавную работу двигателя, меньшее — большую мощность.
Для трёхфазных двигателей количество полюсов кратно трём (9, 12, 15, 18 и т.д.).

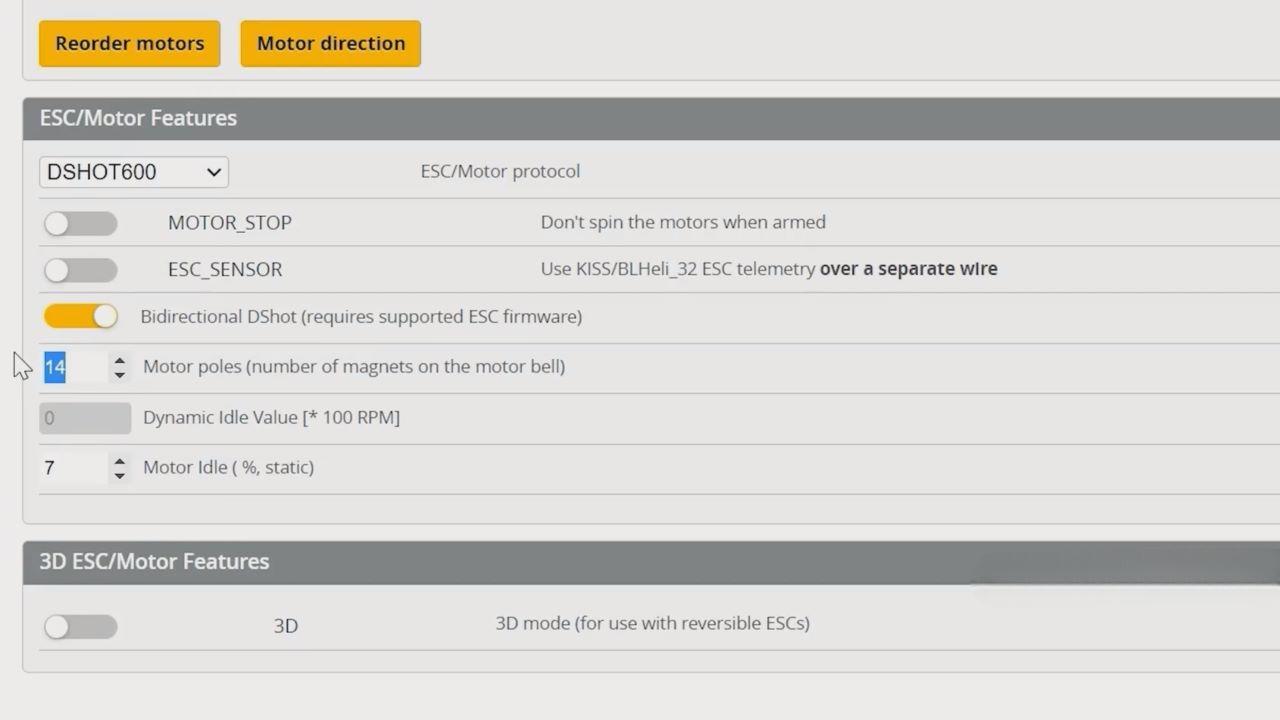
В Betaflight нужно указывать количество магнитов в настройках RPM-фильтров для правильной работы.
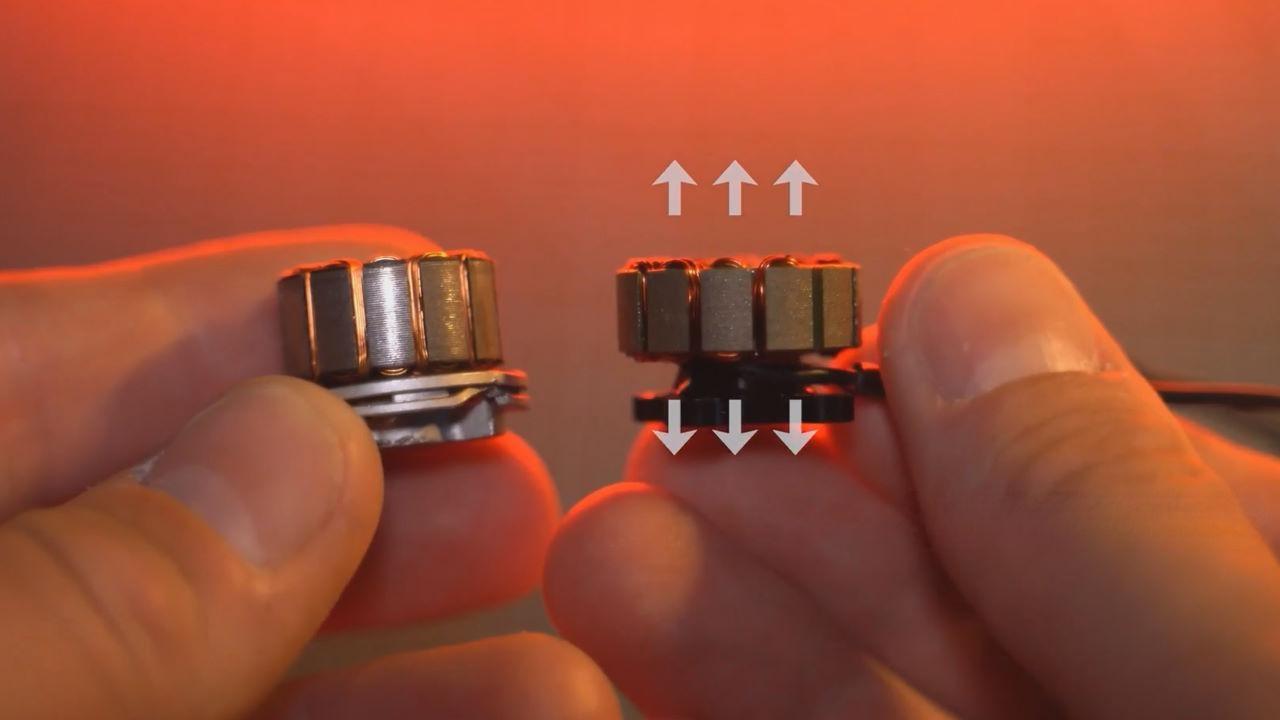
Дизайн основания двигателя
Двигатели бывают с закрытым и открытым дном.
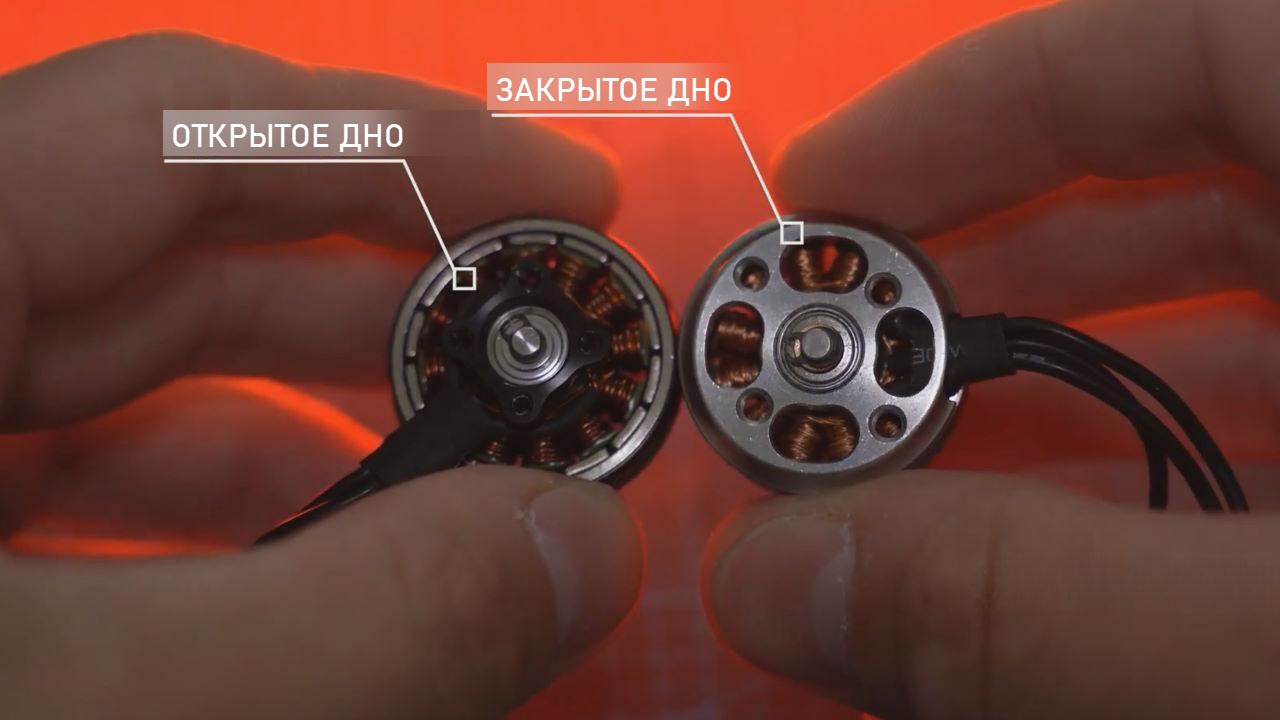
Закрытое дно — более прочное основание, лучше защищает двигатель от грязи.
Открытое дно легче примерно на ~2 грамма за счёт удаления материала, грязь легче почистить, видно глубину вкручивания винтов, что снижает риск повреждения обмоток.
Материал и крепление вала двигателя
Для ротора и основания обычно используются алюминиевые сплавы 7075 и 6082:
- 6082 — более пластичный;
- 7075 — более жёсткий и устойчивый к ударам, чаще встречается в современных двигателях.

Крепление вала может осуществляться винтами или зажимами:
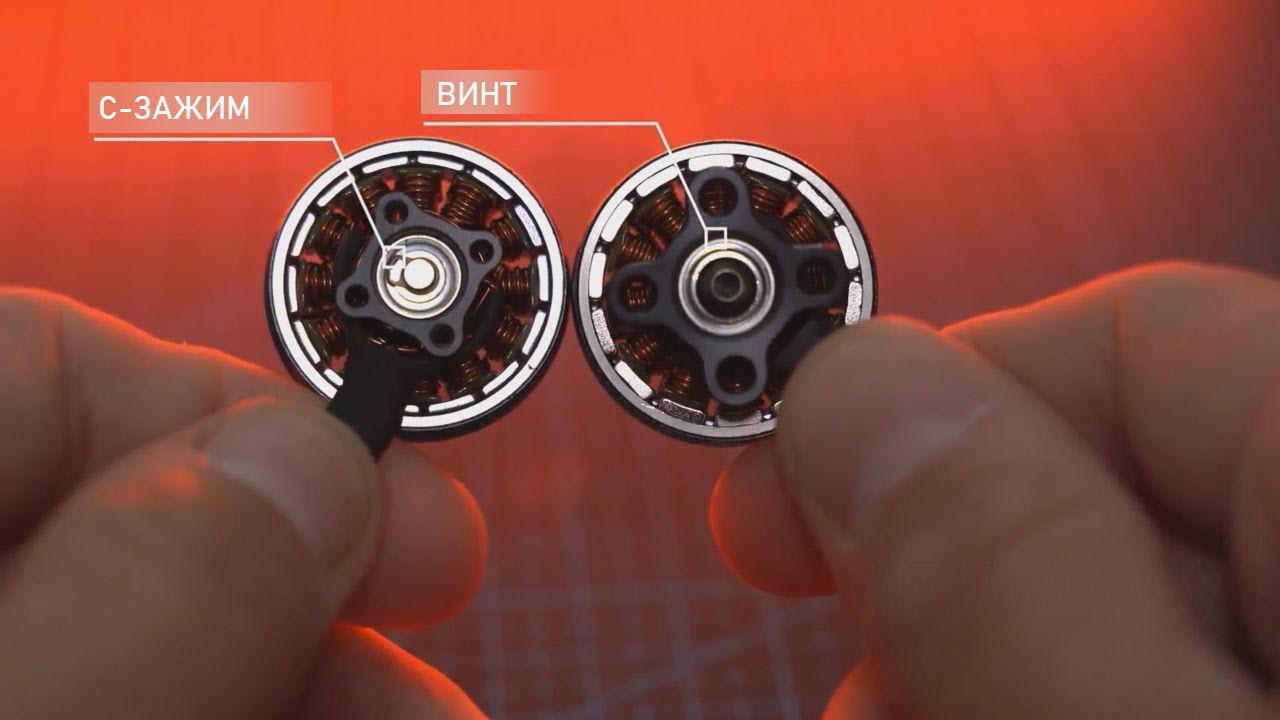
- Винты легче снимать, что удобно для обслуживания, но могут заедать и блокировать вал.
- Зажимы компактнее и легче, но могут откручиваться в полёте и ломаться.
Магниты
Использование выгнутых магнитов позволяет минимизировать воздушный зазор и повысить стабильность и эффективность работы.

Магниты классифицируются по силе магнитного поля: N50, N52, N54 и т.д. Чем выше число, тем сильнее магнитное поле.

Сильное магнитное поле улучшает крутящий момент и скорость отклика, но может снижать плавность работы.
При вращении вручную двигатель с мощными магнитами ощущается более "резким".
Высокие температуры уменьшают магнитные свойства магнитов. Для работы в условиях нагрева используются магниты с индексом H, например N52H и N52SH (устойчивые к нагреву).
Важно не превышать допустимое напряжение питания двигателя — превышение приведёт к его выходу из строя.
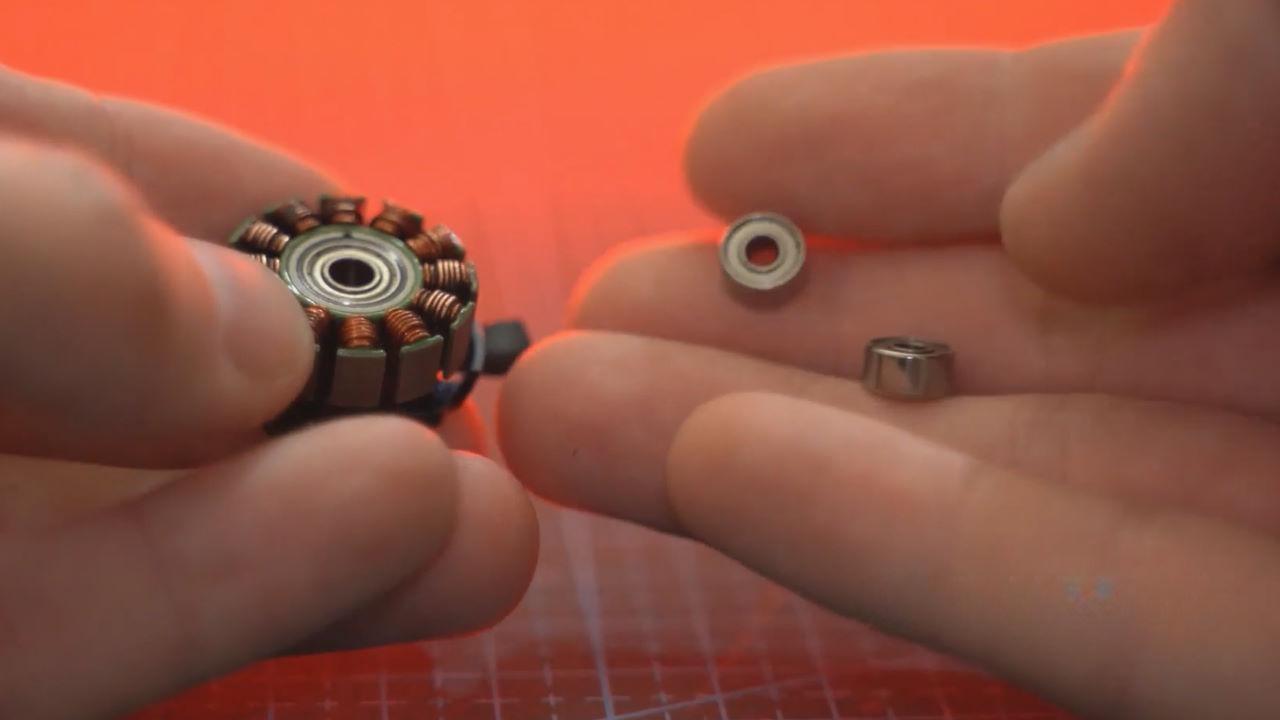
Обслуживание двигателей
Регулярная чистка двигателей после попадания грязи или песка необходима для предотвращения заклинивания и повреждений.

Для очистки используют тряпки, зубные щётки, продувку сжатым воздухом и воду.
При сильном загрязнении двигатель лучше разобрать для полноценной чистки.
Пилоты, часто летающие на высоких значениях газа, должны регулярно проверять и менять подшипники — они быстрее изнашиваются.
Проверка подшипников производится вручную по звуку — гул или шум свидетельствует о необходимости замены.
Кривой или повреждённый ротор создаёт вибрации и повышенный нагрев.
Нельзя останавливать двигатель принудительно во время работы — это приводит к его сгоранию.
Не увеличивайте газ, если дрон застрял в препятствии.
Следующая тема — пропеллеры. Хороших полётов!
Чек-лист по выбору двигателя для FPV-дрона
| Категория | Проверка |
|---|---|
| Основные параметры | |
| Тип двигателя | Выбран бесколлекторный (Brushless) для профессионального FPV-дрона (коллекторные подходят только для игрушечных моделей) |
| Размер статора | Определен в соответствии с размером рамы:
|
| KV-рейтинг | Соответствует стилю полёта:
|
| Соотношение тяги к весу | Рассчитано и соответствует требованиям:
|
| Размер пропеллера | Согласован с KV:
|
| Проверка совместимости | |
| Монтажные отверстия | Совпадают с рамой (стандартные схемы: 16×16 мм или 19×19 мм) |
| Диаметр вала | Соответствует пропеллеру (для 3-7" винтов обычно 5 мм) |
| ESC | Подобран с запасом по току (минимум +10А от максимального потребления) |
| Батарея | Соответствует KV двигателей:
|
| Количество полюсов и магнитов | (например, 12N-14P) учтено для настройки Betaflight |
| Рекомендации под стиль полёта | |
| Гонки | |
| KV-рейтинг | Высокий KV (2300-2700) |
| Соотношение тяги к весу | Высокое (10:1-14:1) |
| Размер статора | Более высокий статор (например, 2207 вместо 2210) |
| Качество магнитов | Высококачественные (N52-N54) |
| Фристайл | |
| KV-рейтинг | Умеренный (1800-2200) |
| Соотношение тяги к весу | 5:1-7:1 |
| Пропорции статора | Баланс между шириной и высотой |
| Количество полюсов | Больше полюсов для плавной работы |
| Дальние полёты | |
| KV-рейтинг | Низкий (1300-1600) |
| Соотношение тяги к весу | 4:1-5:1 |
| Охлаждение | Широкий статор для лучшего охлаждения |
| Вес двигателей | Лёгкие двигатели для снижения общего веса |
| Дополнительные проверки | |
| Тип основания | Выбрано под потребности:
|
| Материалы | Проверены:
|
| Охлаждение | Учтено:
|
| Вес двигателя | Соответствует требованиям:
|
| Крутящий момент | Проверен под задачи:
|
| Финальная проверка | |
| Одна модель двигателей | Все двигатели одинаковые (для симметричной работы) |
| Балансировка | Проверена балансировка пропеллеров |
| Вибрации | Убедился в отсутствии вибраций при тестовом запуске |
| Температура | Проверена температура двигателей после короткого полёта |
| Помехи | Убедился в отсутствии электрических помех на гироскоп |
Перед окончательной покупкой проверьте реальные тесты выбранных двигателей с вашим типом пропеллеров и батареи!
- Пятница, 26 сентября 2025