
4. Полетный контроллер
Полетный контроллер для FPV-дронов
Введение
Полетный контроллер (FlyController) для FPV-дронов — это ключевой компонент, который выполняет функции "мозга" дрона. Он отвечает за прием информации от датчиков и выполнение команд пилота, обеспечивая стабилизацию и точные маневры дрона.
Основные функции полетного контроллера
- Стабилизация полета — использует данные с акселерометров и гироскопов для обеспечения стабильности дрона в воздухе
- Навигация и маневрирование — обработка команд от пилота для выполнения маневров, таких как повороты, подъемы и спуски
- Обработка сенсорных данных — сбор и обработка данных с GPS, барометров, магнитометров и других сенсоров
- Функции безопасности — включение таких функций, как возврат домой, автоматическая посадка в случае потери сигнала и т.д.
- Управление двигателями — регулирует скорость каждого двигателя, чтобы обеспечить необходимое движение или поворот дрона
Полетный контроллер — это сердце вашего FPV-дрона, без которого невозможен стабильный и управляемый полет. Понимание его работы и правильный выбор критически важны для успешного пилотирования.
Выбор полетного контроллера
При выборе полетного контроллера для дрона важно учитывать несколько ключевых аспектов:
-
Проверьте совместимость с другими компонентами дрона [моторами, регуляторами скорости, видеопередатчиками и прочими].
-
Выберите Прошивку: Разные контроллеры поддерживают разные прошивки.
Прошивка / Firmware – программный код, загружаемый во внутреннюю память контроллера. Популярные прошивки среди пользователей - Betaflight, KISS, INAV и другие.
Подробный конспект о прошивках здесь Прошивки
Разные варианты прошивок предлагают разные функции и специализацию для различных применений. Например, INAV разработан с учетом особенностей использования GPS, в то время как Betaflight больше ориентирован на летные характеристики дрона и его программный тюнинг.
Кратко поговорим об основных прошивках:
-
Betaflight— прошивка с открытым исходным кодом и самая популярная для FPV-дронов благодаря большому сообществу и регулярным обновлениям. Позволяет легко получить помощь в случае возникновения проблем. -
KISS— это прошивка с закрытым исходным кодом; аппаратное обеспечение и прошивка контролируются частной компанией. Это означает, что вы ограничены в использовании их собственных контроллеров. Имеет свои специфические преимущества для гонок или фристайла. -
INAV— лучше всего подходит для дронов, требующих навигационных функций, например, автопилота или полетов с выполнением миссий.
-
Настройка прошивки: Прошивка полетного контроллера настраивается с помощью компьютера или смартфона через USB-кабель, Bluetooth или Wi-Fi с помощью специальной программы (Конфигуратора), которая обычно имеет название самой прошивки контроллера. Каждая прошивка имеет собственный интерфейс и параметры, которые можно изменять. Эти параметры можно увидеть в описании ( спецификации ) самого flight-контроллера.
Датчики и особенности
-
Барометр: Встроенный барометр в полетный контроллер используется для измерения атмосферного давления, что позволяет дрону определять свою высоту. Это, в свою очередь, дает возможность зависать на одной высоте и удерживать позицию зависания на одном месте (при использовании GPS-модуля). Для точной работы барометра важно минимизировать влияние на него воздушного потока во время полета. Для этого часто на него надевают небольшой кусок поролона.
-
Размеры: Все flight-контроллеры имеют свои размеры, которые делятся на два типа:
-
Фактический размер: Габариты контроллера и возможность его физического размещения в раме.
-
Монтажный размер (шаг крепежных отверстий): Расстояние между соседними монтажными отверстиями на самом контроллере. Имеет определенные стандарты, такие как 20x20мм и 35x35мм.
-
Выбор монтажного размера зависит от размера вашего дрона и ваших предпочтений относительно конструкции и веса. Важно убедиться, что выбранный flight-контроллер соответствует монтажным отверстиям на раме дрона для обеспечения надежного крепления.
-
Поколения процессоров для полетных контроллеров
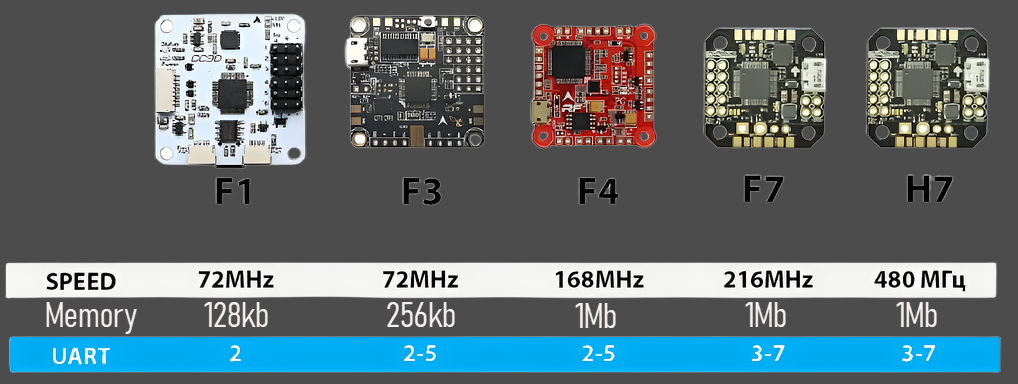
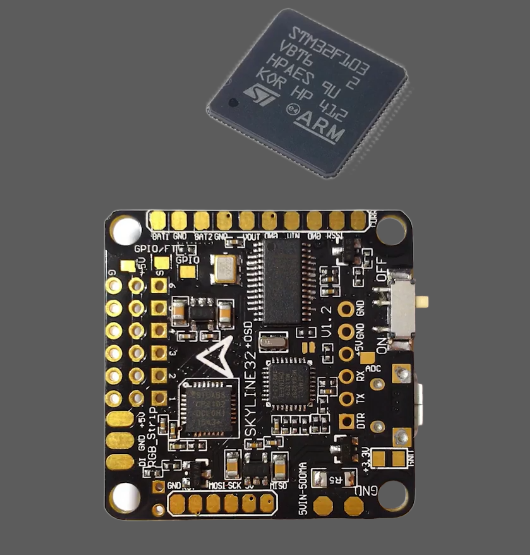
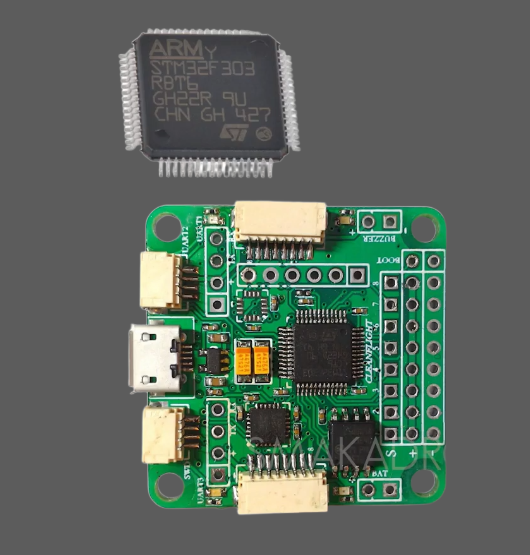
F1/F3 — устаревшие поколения
F1/F3 Старые поколения процессоров, которые сейчас редко используются в современных FPV-дронах.
 |
 |
Преимущества:
- Низкая стоимость
- Достаточно для самых простых сборок
Недостатки:
- Ограниченная производительность
- Меньше возможностей для настройки
- Не поддерживает современные функции
- Меньше каналов управления
Эти процессоры подходят только для самых простых и бюджетных сборок. Для серьезного использования рекомендуется перейти на более современные поколения.
F4 — текущий стандарт
Процессоры F4 представляют собой золотую середину между производительностью и стоимостью и являются наиболее популярным выбором для FPV-дронов.
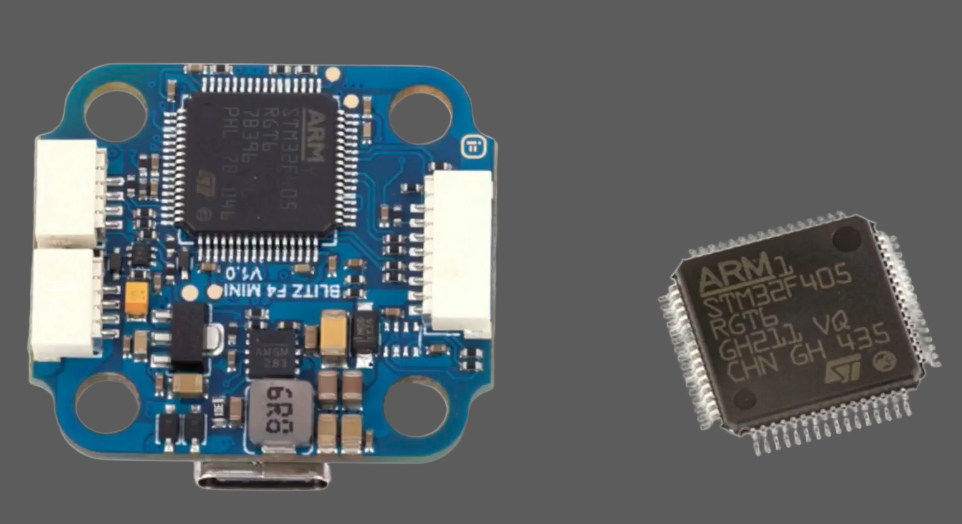
Полетные контроллеры на процессорах F4 обычно имеют большую вычислительную мощность, дополнительные датчики, улучшенную поддержку для различных типов аппаратов и передовые функции, такие как усовершенствованная система стабилизации, поддержка более точной GPS-навигации, улучшение функций автопилота и т.д.
Основные варианты F4, используемые в flight-контроллерах: F405 и F411
Одной из главных преимуществ F4 является скорость обработки данных – тактовая частота процессора F4 составляет 180 МГц, что вдвое быстрее, чем у F1 и F3. Часто полетные контроллеры на базе F4 используются в дронах типа Tiny Whoop и Cine Whoop, которым не требуются повышенные вычислительные мощности для полета.
Преимущества:
- Хороший баланс производительности и стоимости
- Поддержка всех основных функций FPV-дронов
- Достаточная производительность для большинства стилей полета
- Широкая доступность и поддержка
Процессоры F4 идеально подходят для начинающих и среднего уровня пилотов. Они обеспечивают достаточную производительность для фристайла, гонок и даже некоторых Long Range сборок.
F7 — расширенные возможности
Процессоры F7 обеспечивают более высокую производительность и расширенные возможности по сравнению с F4.
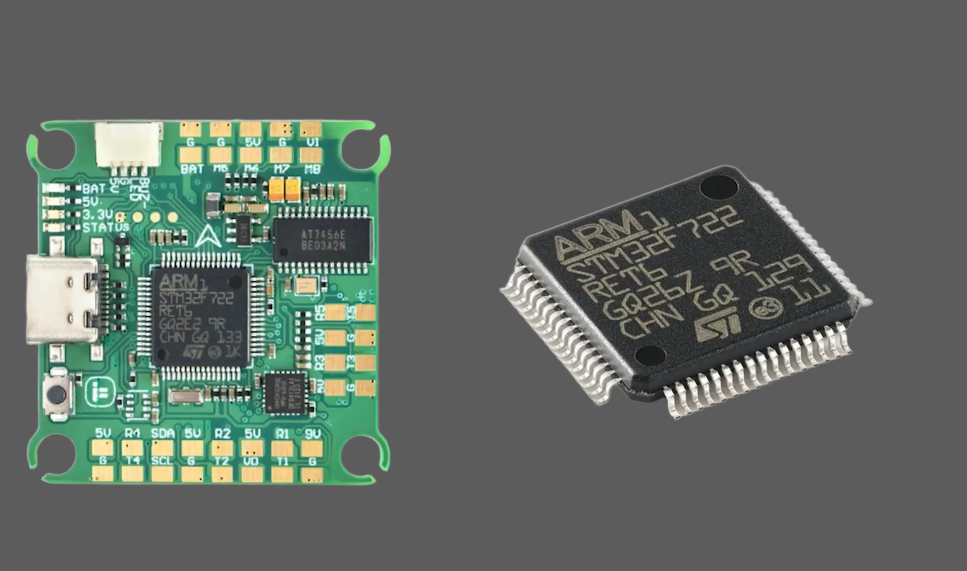
Преимущества:
- Более высокая тактовая частота по сравнению с предыдущими поколениями позволяет быстрее обрабатывать данные с датчиков и выполнять сложные алгоритмы стабилизации.
- Благодаря большему объему оперативной и постоянной памяти, F7-процессоры могут хранить больше настроек и поддерживать более сложные программные функции.
- Имеют лучшую поддержку для продвинутых функций, таких как телеметрия, GPS, вспомогательные датчики, что может быть важно для длительных полетов и гонок.
- Могут управлять большим количеством периферийных устройств одновременно
- Идеальны для сложных конфигураций FPV-дронов
Использование процессоров F7 в FPV-дронах значительно улучшает общую производительность и дает пилотам больше возможностей для настройки и оптимизации полета. Это важно для технически подкованных пользователей, которые хотят максимально использовать потенциал своих дронов. Часто их ставят на фристайловые дроны и санлифтеры.
H7 — новейшее поколение
Процессоры H7 представляют собой самое новое поколение, обеспечивающее максимальную производительность для FPV-дронов.
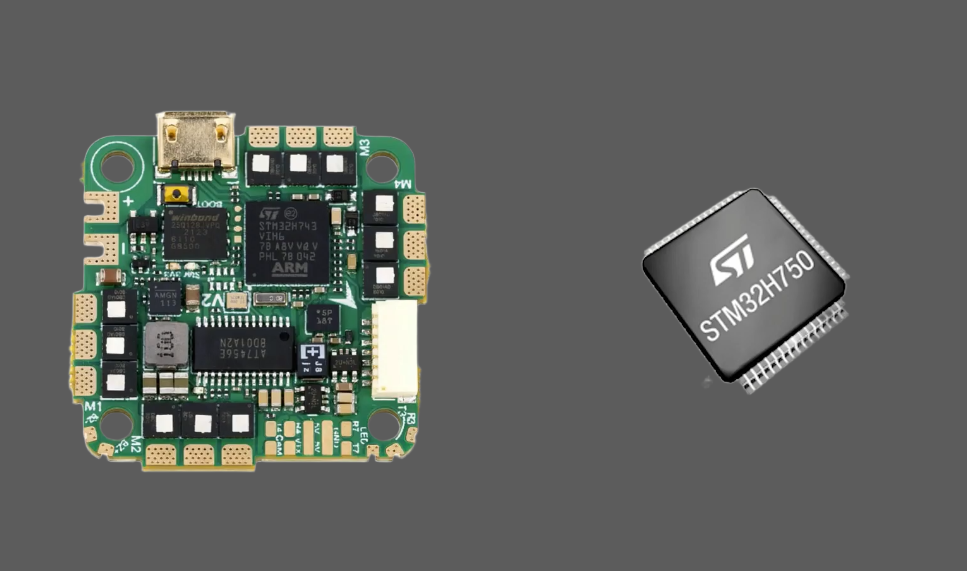
Преимущества:
- Максимальная производительность и скорость обработки
- Поддержка самых сложных алгоритмов и функций
- Высокая частота опроса датчиков
до 8 КГц - Будущая совместимость с новыми функциями и технологиями
Недостатки:
- Высокая стоимость
- Не все функции могут быть востребованы для обычных полетов
- Потребляет больше энергии
Поскольку технологии FPV-дронов продолжают развиваться, процессоры H7 обеспечивают запас мощности, который будет необходим для будущих инноваций и функций, которых еще не существует. Выбор конкретного процессора зависит от ваших потребностей, бюджета и технических требований к дрону.
Гироскопы и акселерометры
Что такое гироскоп?
Гироскоп является одним из ключевых компонентов полетного контроллера FPV-дрона, который отвечает за измерение и стабилизацию ориентации дрона в пространстве.
Основные функции гироскопа:
- Измерение угловой скорости вращения дрона
- Определение положения дрона в пространстве
- Обнаружение нежелательных колебаний и вибраций
- Предоставление данных для системы стабилизации
Современные гироскопы для полетных контроллеров
mPU6000
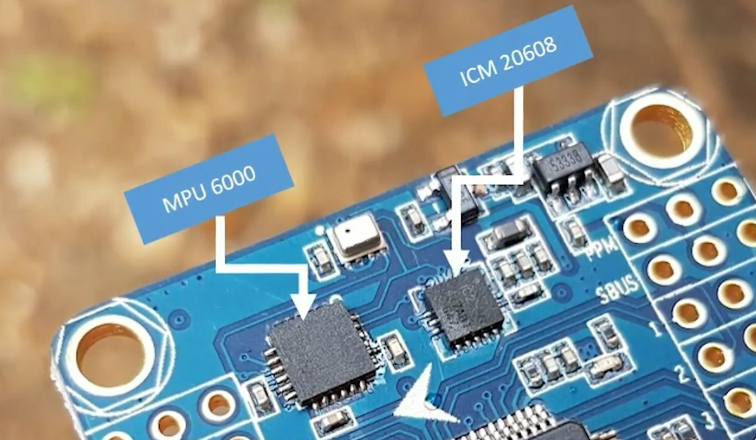
- Хорошая чувствительность и точность
- Низкий уровень шума
- Хорошо работает при высоких частотах опроса
- Доступная цена
ICM 20602 и ICM 20689
Современные гироскопы с высокой чувствительностью.
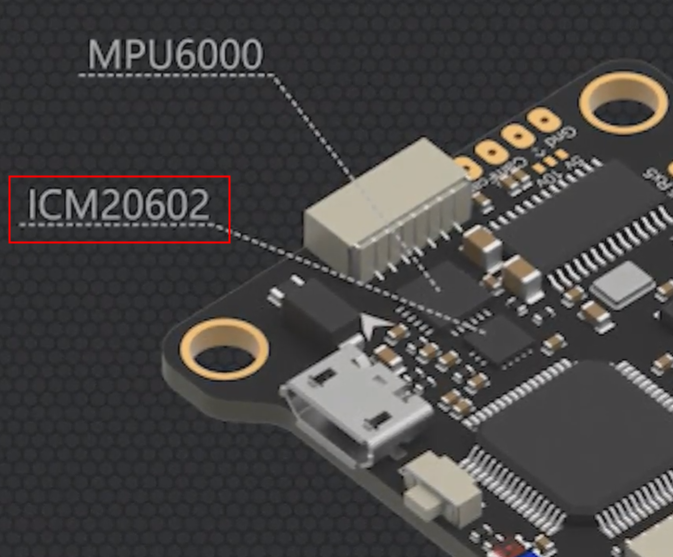
Преимущества:
- Высокая разрешающая способность
- Хорошая производительность для высокоскоростных полетов
- Используются в новейших контроллерах для обеспечения высокой точности полета
Недостатки:
- Склонны к сбоям из-за вибраций
- Требуют тщательной настройки фильтров
ICM 42688-P
Современный гироскоп с улучшенными характеристиками по сравнению с ICM 20689.
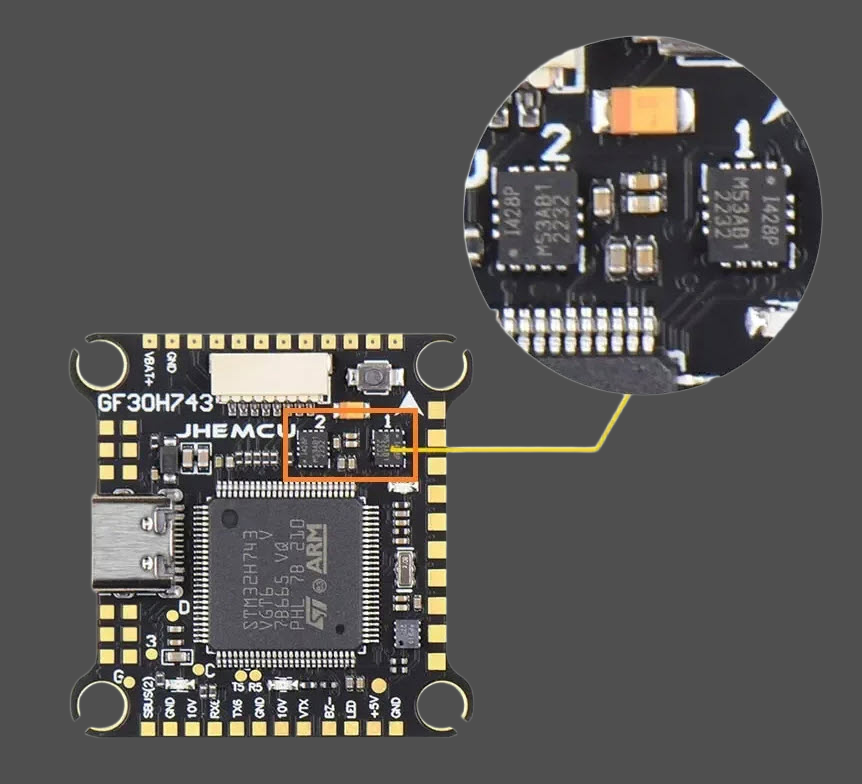
Преимущества:
- Улучшенная производительность при высоких частотах опроса
- Лучшая стабильность при высоких температурах
- Низкое энергопотребление
- Высокая точность измерений
Мягкое крепление контроллера полета (антивибрационные демпферы) имеет решающее значение для его оптимальной работы.
Демпферы в значительной мере гасят высокочастотные вибрации от рамы, которые влияют на гироскоп. Почти все флай-контроллеры сегодня имеют отверстия М4, которые позволяют вставлять резиновые демпферы со сквозными отверстиями под крепежные болты М3 для крепления полетного контроллера к раме.
Питание и распределение энергии
BEC (Battery Elimination Circuit)
BEC (Battery Elimination Circuit) / Стабилизатор напряжения — это электронная схема, которая преобразует высокое напряжение от основного аккумулятора (например, 6S 22.2V) в более низкое (например, 5V или 9V), необходимое для питания электронных компонентов дрона.
Преимущества использования BEC:
- Устраняет необходимость в отдельном аккумуляторе для электроники
- Упрощает конструкцию дрона
- Обеспечивает стабильное напряжение для чувствительной электроники
Ограничения:
- Ограниченная мощность и ток
- Может перегреваться при высоких нагрузках
- Ограниченное напряжение на выходе
Распределение напряжения
Разные компоненты дрона требуют разного напряжения для работы.
Примеры:
- Приемник работает на 5 Вольт, поэтому его нужно припаять к пину BEC 5 Вольт
- Видеопередатчик работает от 7,4 Вольт до 26,4 Вольт, поэтому для него нужен соответствующий "бек" в виде пина под это напряжение
Эту информацию и схему подключения можно найти в описании полетного контроллера.
Важно правильно подключить каждый компонент к соответствующему источнику питания. Неверное подключение может повлечь повреждение дорогостоящего оборудования и выход его из строя.
Типы соединений и интерфейсы
Типы разъемов
Полетные контроллеры имеют три основных типа разъемов для соединения:
- Пластиковые коннекторы JST — удобны для быстрого подключения и отключения компонентов
- Паяльные колодки на сквозные отверстия — обеспечивают надежное соединение, но требуют пайки
- Пины для прямого подключения — используются для компактных сборок, где важна экономия места

JST разъем
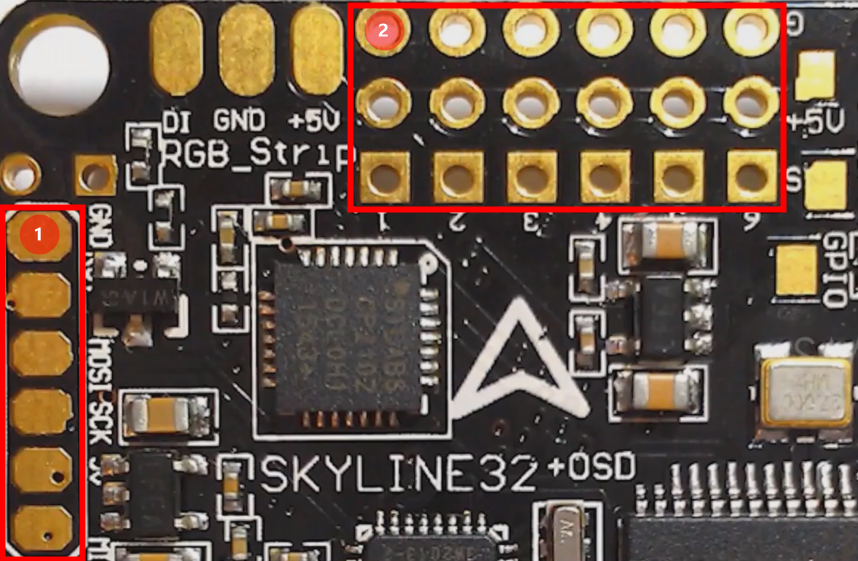
Паяльные колодки 1 и сквозные отверстия 2
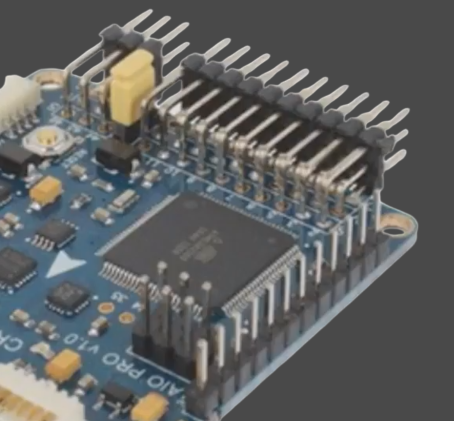
Пины для прямого подключения
Выбор типа соединения зависит от ваших потребностей. Для тестовых сборок удобнее использовать GST-коннекторы, а для окончательной сборки лучше паять компоненты напрямую для повышения надежности.
UART — последовательный порт данных
UART (Universal Asynchronous Receiver Transmitter) — это последовательный порт данных, который позволяет устройствам общаться друг с другом. Фактически расшифровывается как Универсальный Асинхронный Приемник-Передатчик.
-
UART имеет контакты приемника (RX) и передатчика (TX) для передачи сигналов. Асинхронный означает, что он может передавать и получать данные по отдельным линиям (но не одновременно по одной линии).
-
Используется для подключения внешних компонентов, таких как приемники уравляющих сигналов (Receivers), видеопередатчики (VTX), GPS и т.д.
-
Контроллеры полета имеют ограниченное количество UART-портов (от двух до шести). Это зависит от процессора и доступного места.
-
Перед покупкой убедитесь, что для устройств, которые вы планируете использовать, будет достаточно UART-портов.
-
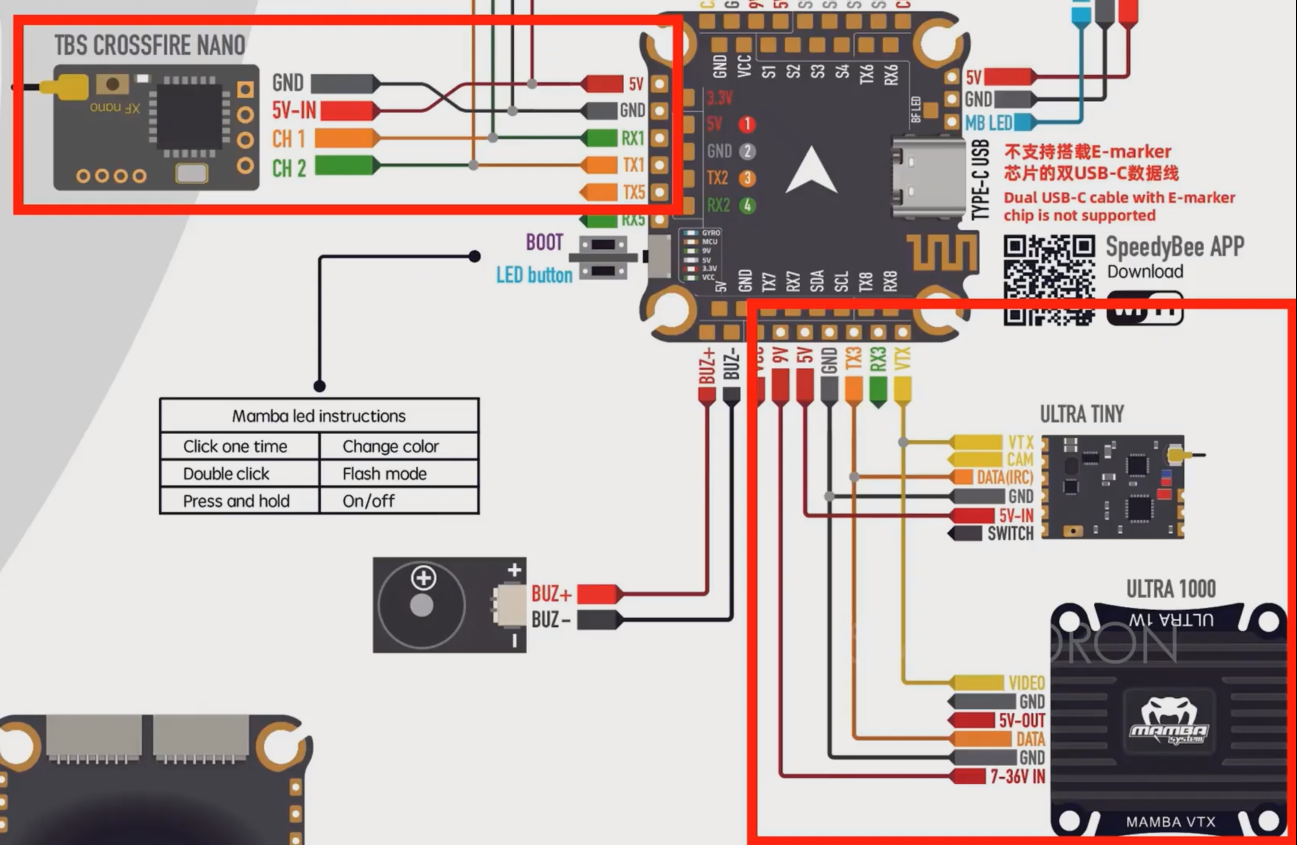
Информационные пины — это RX и TX. По ним чаще всего идет обмен информацией между flight-контроллером и периферийными устройствами (приемники, VTX, GPS, маяки).
-
Также для подключения нужны пины питания (5V, GND).
-
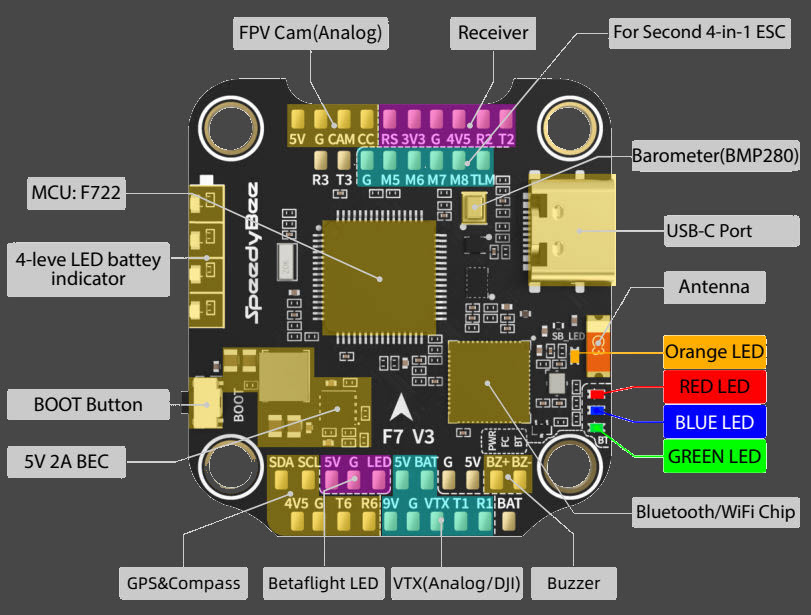
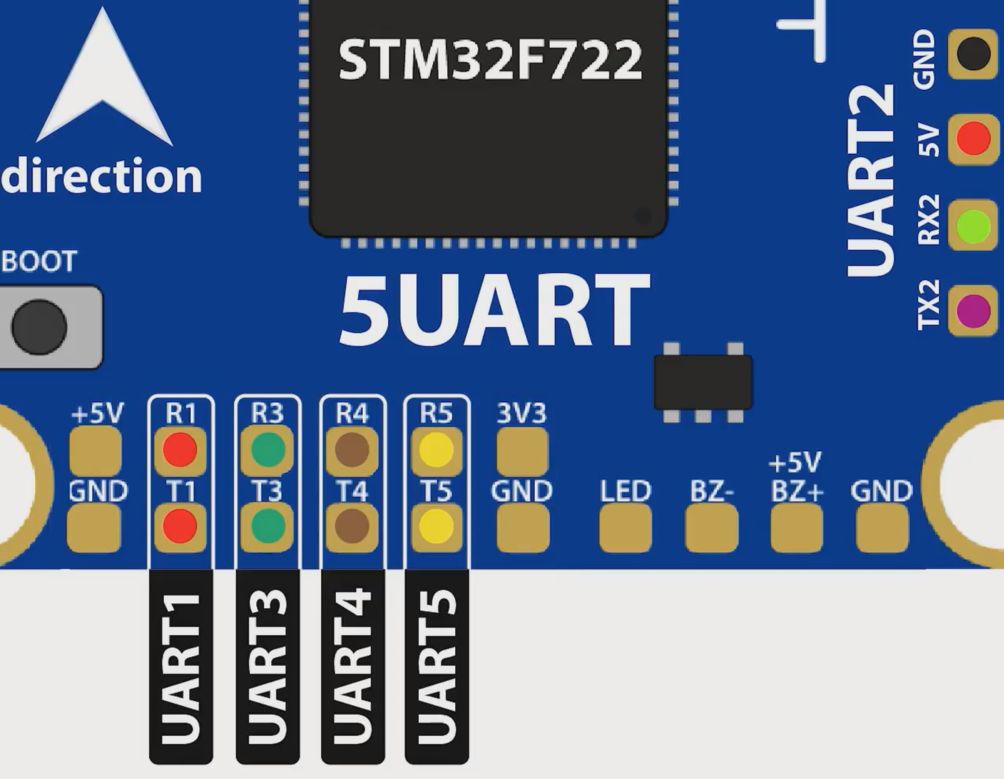
На схеме полетного контроллера можно увидеть TX1, RX1 или TX5, RX5 вместе с 5V и GND. Цифра после TX и RX означает номер UART-порта. Например, TX5 и RX5 — это UART5. TX3 и RX3 — это UART3.
- Иногда обозначения TX и RX заменяются на T и R как на рисунке ниже.
-
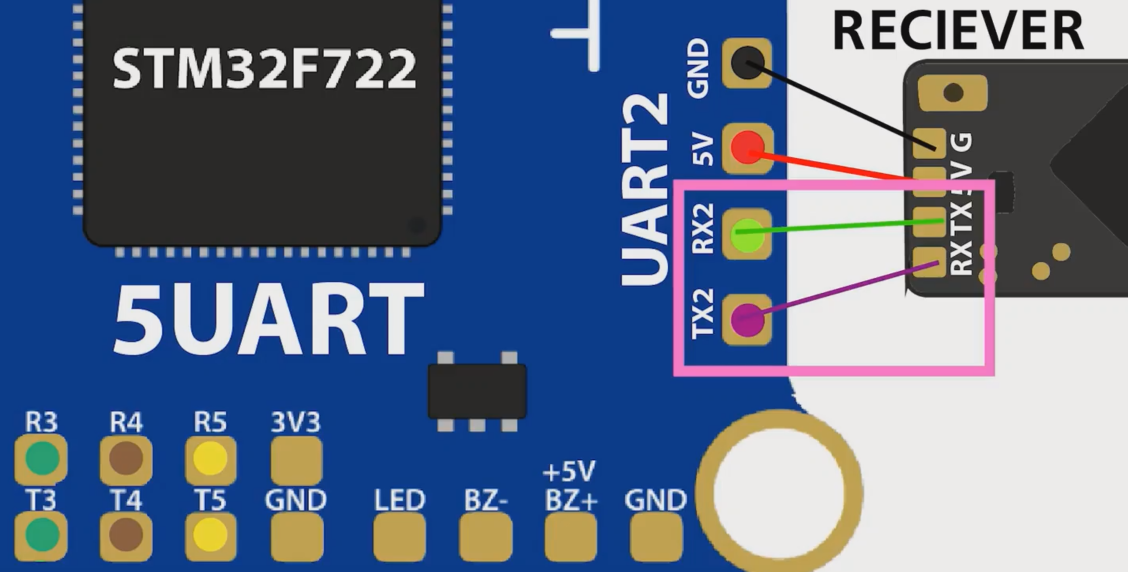
Важно: При подключении устройства (например, приемника сигналов управления) к пилотному контроллеру:
-
Найдите на контроллере любые свободные пины питания 5V и GND и припаяйте к ним соответствующие провода от устройства.
-
Ключевое правило: пин TX подключаемого устройства припаяйте к пину RX полетного контроллера. RX устройства припаяйте к TX контроллера. (
TX -> RX,RX -> TX).
-
-
В полетном контроллере обычно задействованы
как минимумдва UART: для Receiver (приемника управления) и для VTX (видеопередатчика). Если вы хотите подключить дополнительное устройство, например GPS, оно займет отдельный UART. -
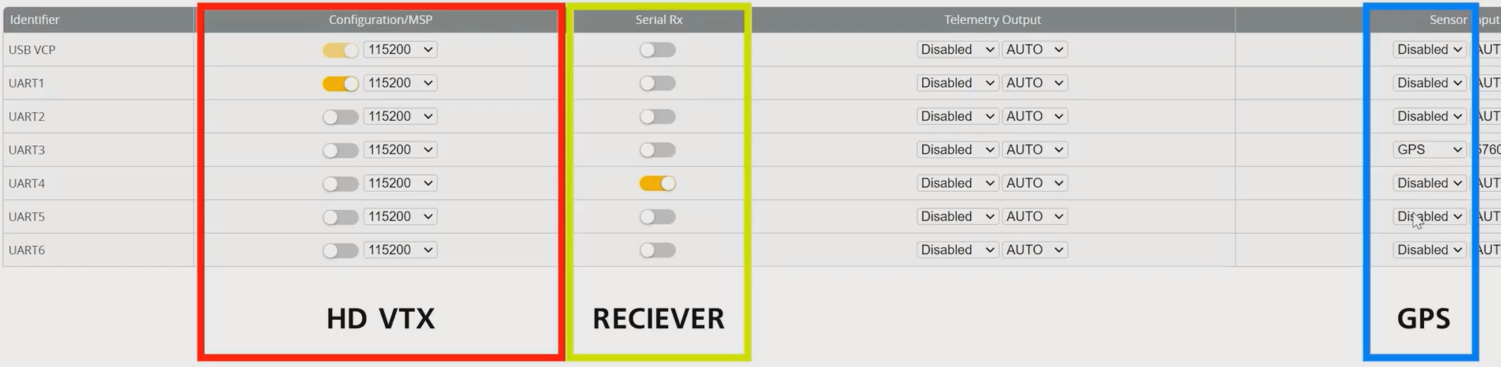
Важно: Просто припаять устройство к полетнику недостаточно. Необходимо в программе (например, Betaflight) поставить галочку или выбрать из списка, что именно припаяно к данному UART-порту полетника. Полетный контроллер не "поймет", что к нему подключено, пока вы не укажете это в софте.
-
На один UART нельзя припаивать несколько устройств. Их обязательно нужно распределять по свободным UART-портам. Также нельзя на одни пины питания подключать несколько устройств (если они не рассчитаны на это, что маловероятно) – используйте отдельные пины или разводите питание.
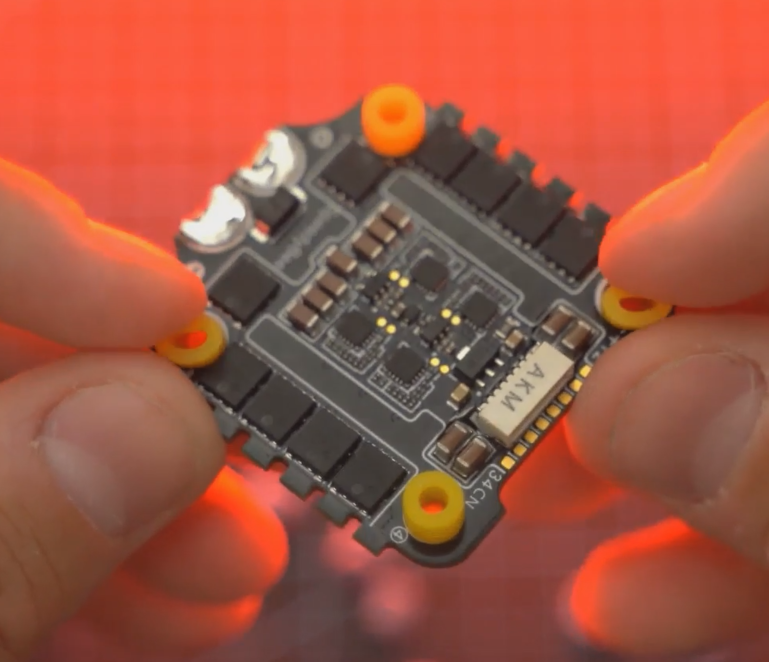
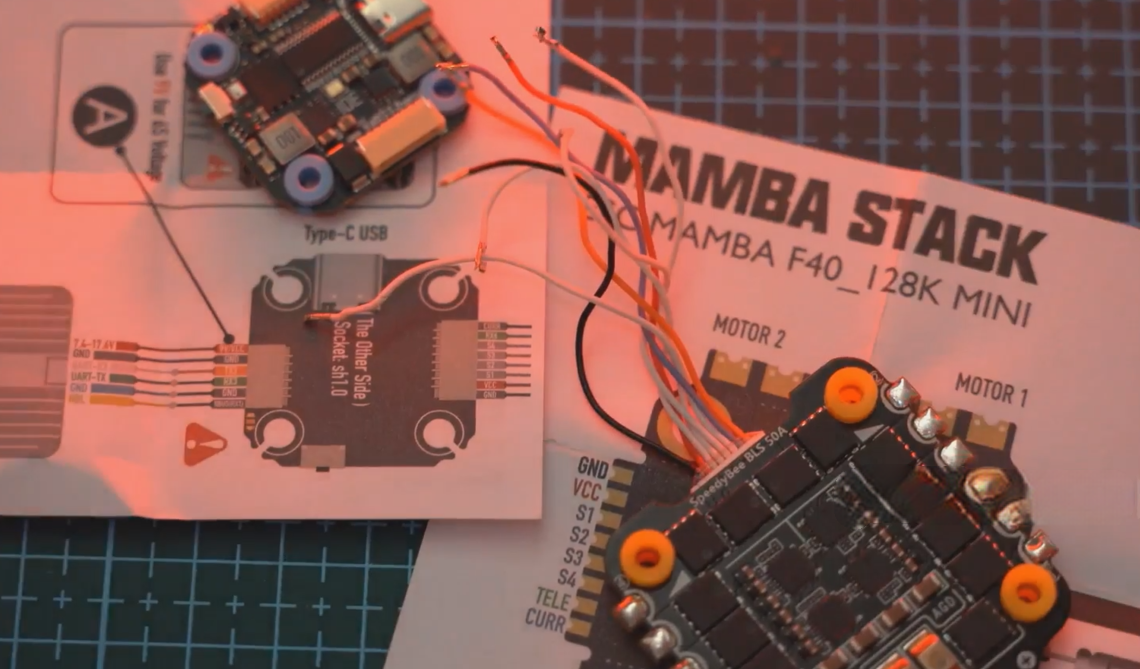
Совместимость с ESC и стеки
При подборе flight-контроллера нужно учитывать его совместимость с ESC (регуляторами скорости двигателей).
-
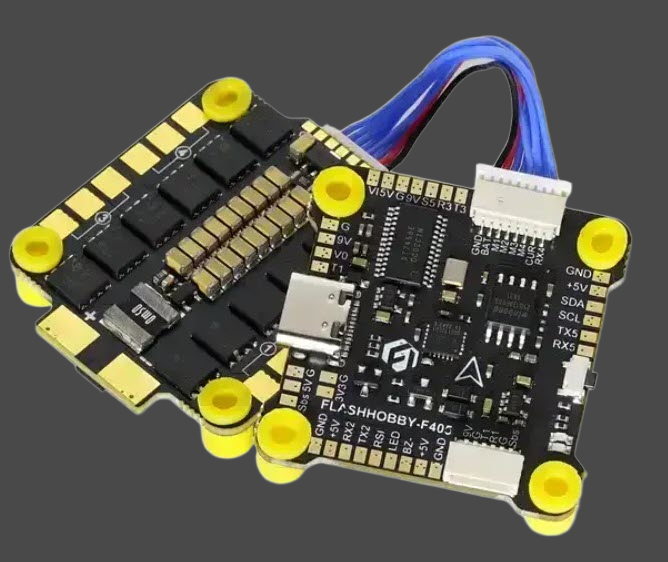
Платы
ESC (4-in-1 ESC)часто продаются вместе с контроллерами полета. Такая сборка называется FPV-Stack (стек). Он включает в себя два основных электронных модуля, обычно это микроконтроллер Flight Controller и плата регуляторов оборотов двигателей ESC (Electronic Speed Controller), которые соединены вместе кабелем. Это очень удобно, и такую готовую сборку можно сразу поставить на дрон от одного производителя, что выходит дешевле и удобнее. -
Однако, если вы используете flight-контроллер и ESC от разных брендов, они должны быть обязательно совместимы между собой (по протоколу связи, например DShot, и напряжению сигнала). Расположение контактов на FC и ESC может отличаться. При этом потребуется вручную изменить расположение проводов в жгуте, что не может быть очень сложным, но потребует аккуратной работы и внимательности.
-
Если вы собираете 6-ти или 8-ми моторный дрон, тогда flight-контроллер и ESC должны иметь поддержку нужного количества моторов.
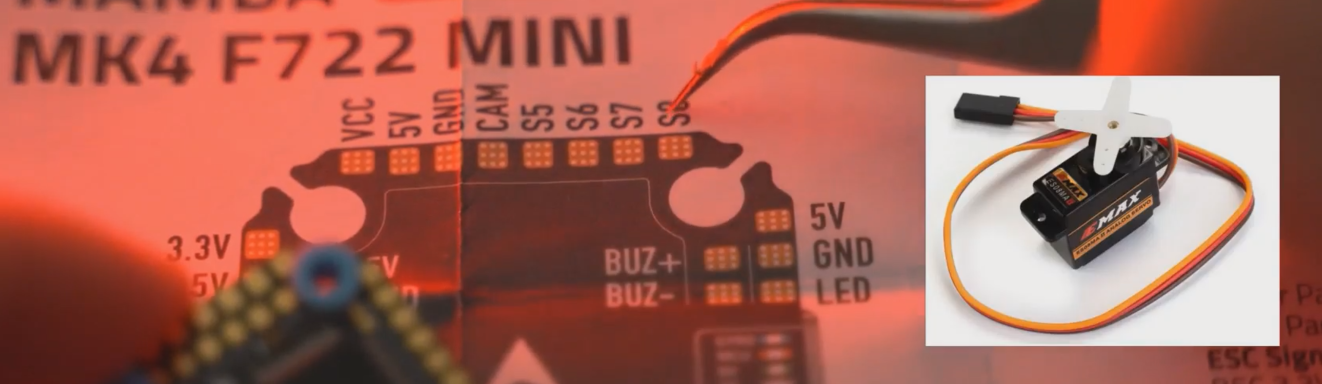
Подключение сервоприводов и "Пищалки"
Не забудьте проверить количество доступных UART для подключения сервоприводов, если это необходимо.
Про подключение сервопривода Конспект
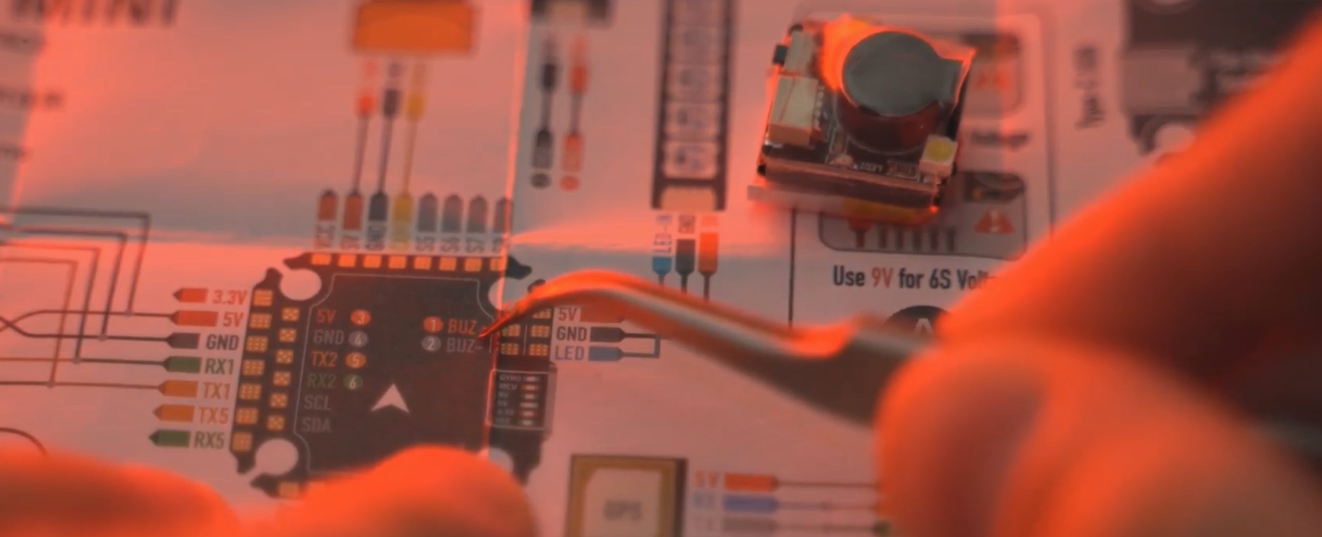
Проверьте, имеет ли плата пины под пайку бузера (зуммера) для поиска дрона по звуку.
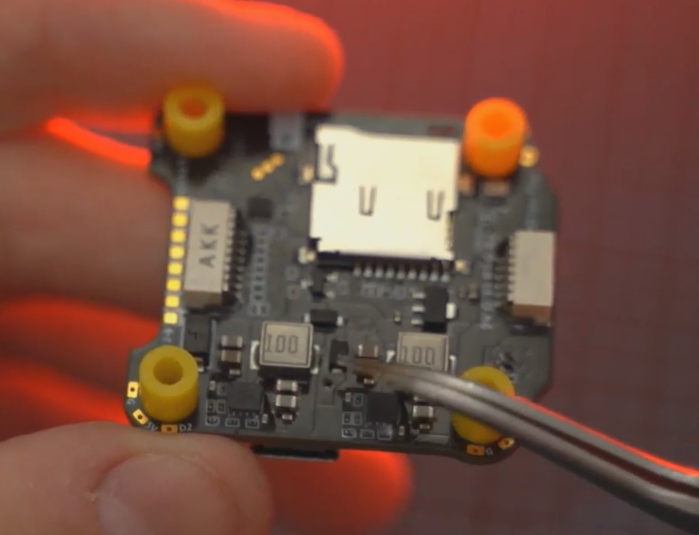
Blackbox — анализ полетных данных
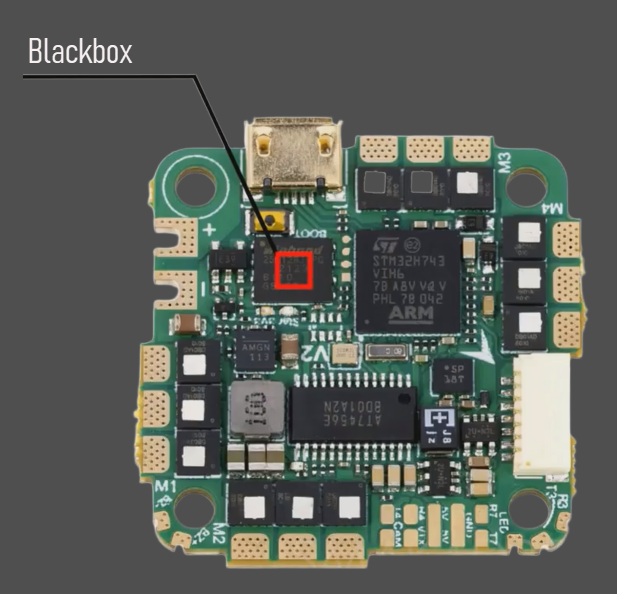
Что такое Blackbox?
Это инструмент для записи полетных данных, который позволяет собирать подробную информацию о поведении дрона во время полета. Blackbox записывает данные об ориентация дрона, измерениях гироскопа, командах пульта ДУ, выходных сигналах моторов и т.д.
Преимущества использования Blackbox:
- Анализ полетных характеристик дрона
- Выявление проблем с настройками или оборудованием
- Оптимизация PID-настроек для улучшения полетных качеств
- Изучение причин аварий и падений
Ограничения:
- Требует дополнительной памяти на полетном контроллере
- Анализ данных требует времени и навыков
- Не все контроллеры поддерживают эту функцию
Как использовать Blackbox
Для использования Blackbox необходимо:
- Убедиться, что ваш полетный контроллер поддерживает запись Blackbox
- Включить запись Blackbox в настройках Betaflight
- Выполнить полет с записью данных
- Загрузить данные с контроллера на компьютер
- Проанализировать данные с помощью специального программного обеспечения
Blackbox ExplorerилиPIDtoolboxдля тонкой настройки параметров фильтрации и PID-регуляторов.
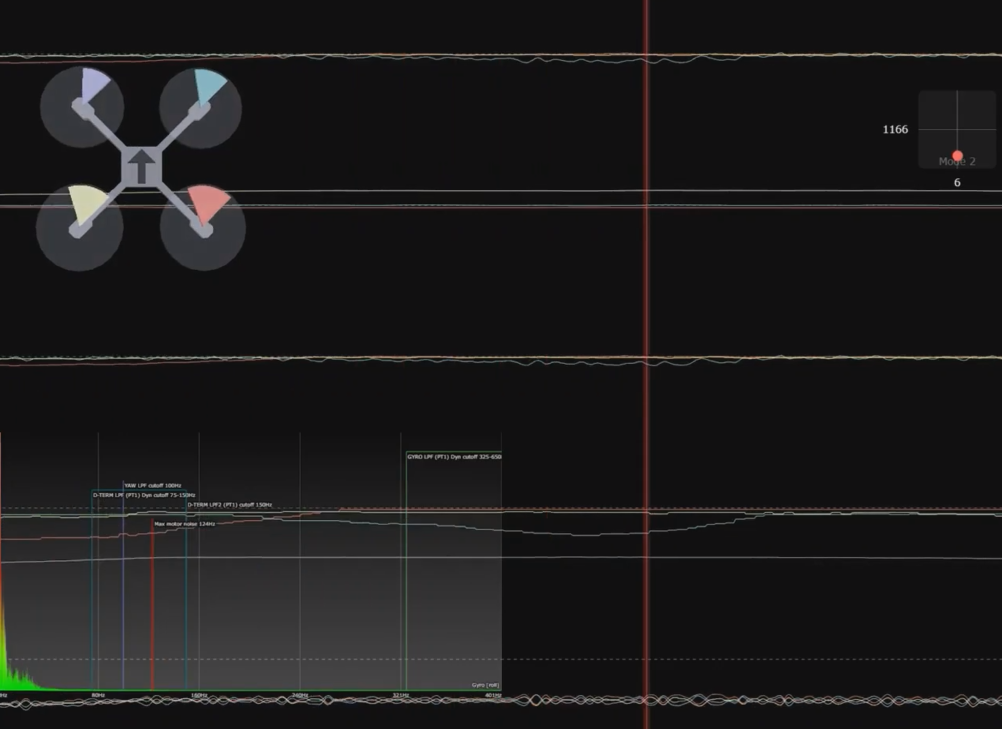
Для записи логов Blackbox полетный контроллер должен иметь либо встроенную флеш-память, либо слот для SD-карты. Объем памяти указывается в описании полетного контроллера. Blackbox является мощным инструментом для пилотов FPV-дронов, которые хотят глубже понять поведение своих дронов и оптимизировать их полетные характеристики. Использование Blackbox может значительно улучшить качество полета и обеспечить более точное и надежное управление дроном.
Ориентация полетного контроллера
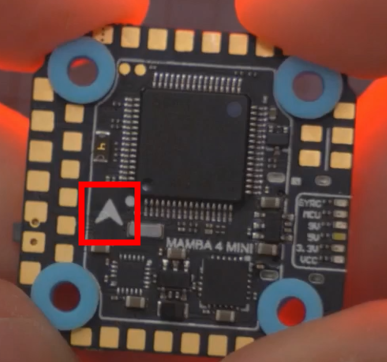
Правильная установка контроллера
Правильная ориентация:
Каждый FlyController имеет стрелочку, которая показывает, в каком положении настроены гироскоп и акселерометр. Она должна указывать в направлении камеры дрона, то есть вперед, и быть сверху (она изображена только с одной стороны контроллера).
Последствия неправильной ориентации:
- Если установить стрелку назад, дрон будет выполнять команды зеркально, что сделает его контроль невозможным
- Если установить стрелку вниз, дрон будет понимать, что он находится в перевернутом состоянии
- Неправильная ориентация приведет к непредсказуемому поведению дрона
Если по какой-то причине вы не можете правильно установить контроллер (например, из-за особенностей рамы), это можно исправить с помощью программного обеспечения, внеся корректировку в настройки гироскопа и акселерометра в программе Betaflight.
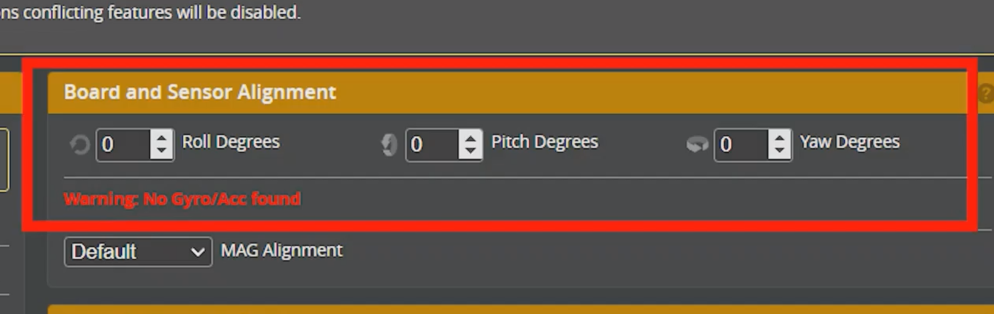
В настройках можно указать ориентацию контроллера, чтобы компенсировать неправильную физическую установку.
Водонепроницаемость и защита
Водонепроницаемые покрытия
Все особенности, которые были указаны в этом занятии, также относятся и к AIO (ALL IN ONE) — контроллерам "все в одном". Те, кто хочет летать возле водопадов, падать в снег или в случае затопления дрона спасти его электронные компоненты от сгорания, имеют возможность герметизации за счет специальных защитных покрытий, которые создают водонепроницаемый барьер.
Преимущества водонепроницаемых покрытий:
- Создают водонепроницаемый барьер для электронных компонентов
- Позволяют спасти дрон после падения в воду
- Защищают от влаги и конденсата в условиях высокой влажности
Силиконовый герметик
Силиконовый герметик может быть использован для покрытия платы, но важно проверить, чтобы не было перекрытия важных соединений или сенсоров. Для герметизации используют, например, B7000 или T6000, а также есть специальные лаки для печатных плат (conformal coating).
Правильное использование силиконового герметика:
- Наносите тонкий слой, избегая покрытия сенсоров
- Дайте герметику полностью высохнуть перед использованием
- Проверьте, что герметик не мешает охлаждению компонентов
Ограничения:
- Увеличивает вес дрона
- Может затруднить обслуживание и ремонт
- Не обеспечивает 100% защиту от воды
Совместимость и выбор полетного контроллера
Критерии выбора полетного контроллера
| Критерий | Рекомендации | Важность |
|---|---|---|
| Процессор | F4 для начинающих, F7/H7 для профессионалов | Высокая |
| Гироскоп | ICM 42688-P для лучшей производительности | Высокая |
| UART-порты | Минимум 4 для базовой сборки | Средняя |
| Blackbox | Рекомендуется для анализа полетов | Средняя |
| Водонепроницаемость | По необходимости, в зависимости от условий полета | Низкая |
При выборе полетного контроллера важно учитывать, для каких целей вы будете использовать дрон. Для гонок важна максимальная отзывчивость, для фристайла — стабильность и маневренность, а для Long Range полетов — энергоэффективность и надежность.
Совместимость с рамой
При выборе полетного контроллера важно учитывать его совместимость с рамой дрона.
Советы по совместимости:
- Проверьте размер контроллера (обычно 30x30 мм или 20x20 мм)
- Убедитесь, что рама имеет подходящие отверстия для крепления
- Проверьте габаритную высоту контроллера, чтобы он не касался других компонентов
- Убедитесь, что контроллер не перекрывает антенны или другие важные компоненты
-
Напряжение питания: Посмотрите на напряжение, на котором работает полетный контроллер (Input Voltage). Например, "6S" означает, что он работает в диапазоне напряжений от
14.8V(3.7V * 4) до25.2V(4.2V * 6) для 6S аккумулятора.
Заключение
Полетный контроллер является критически важным компонентом любого FPV-дрона, от которого зависит стабильность полета, отзывчивость управления и общая безопасность. Правильный выбор и настройка полетного контроллера могут значительно улучшить ваш опыт полетов и предотвратить потенциальные проблемы.
Помните, что:
- Выбор процессора (F4, F7, H7) должен соответствовать вашим потребностям и бюджету
- Гироскоп играет ключевую роль в стабилизации полета — выбирайте современные модели (ICM 42688-P)
- Правильная ориентация контроллера критически важна для корректной работы
- Достаточное количество UART-портов необходимо для подключения всех компонентов
- Betaflight является предпочтительной прошивкой для большинства FPV-приложений
- Мягкое крепление контроллера уменьшает влияние вибраций на гироскоп
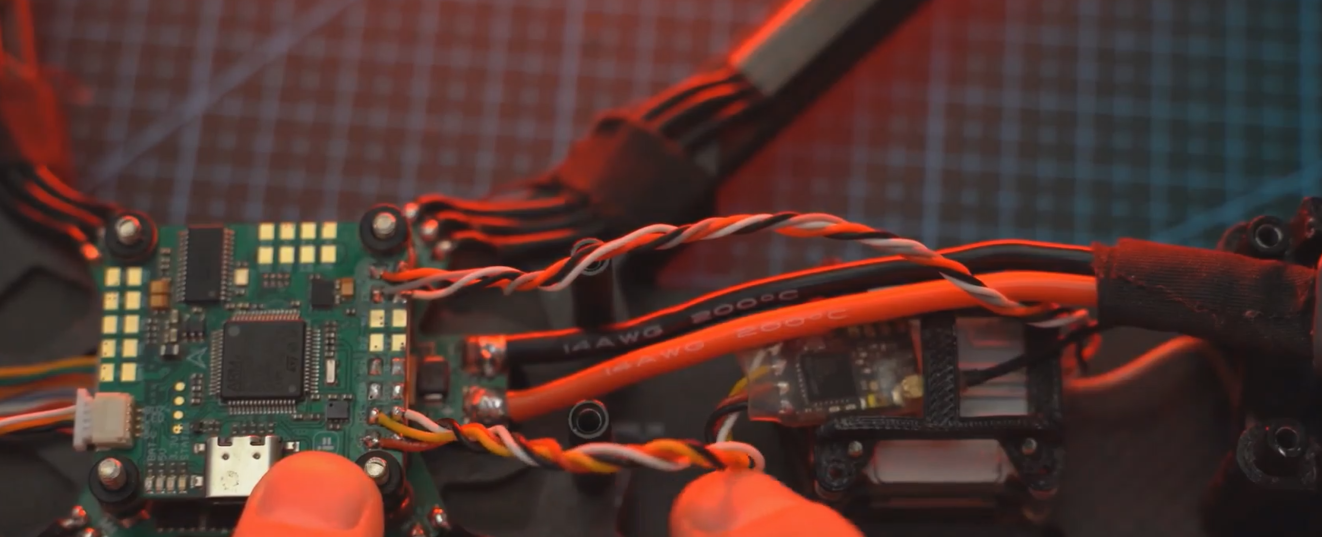
- Припаянные провода между всеми компонентами должны быть аккуратно уложены (например, скручены в жгут) для удобства поиска неисправности и иметь адекватную длину для удобного демонтажа компонентов. Старайтесь прокладывать провода так, чтобы они меньше касались полетного контроллера и не мешали работе чувствительных сенсоров.
- Регулярно обновляйте прошивку для получения новых функций и исправлений
- Используйте Blackbox для анализа и оптимизации полетных характеристик
- Каждый полетный контроллер имеет схему пинов (pinout diagram) и рекомендованные подключения устройств к нему – всегда сверяйтесь с ней!
Инвестиции в качественный полетный контроллер и правильную его настройку окупятся безопасными и приятными полетами. Не экономьте на этом компоненте, так как надежный полетный контроллер — это основа безопасного пилотирования FPV-дронов.
В следующем уроке мы рассмотрим двигатели для FPV-дронов, их характеристики, как их выбирать и на что обращать внимание при покупке. Удачных полетов!
- Обучение Обучение | Курсы
- Вторник, 02 сентября 2025