
12. Телеметрия и OSD.
Телеметрия — это специализированная система сбора и передачи данных о состоянии дрона в режиме реального времени.
Телеметрия дрона включает комплекс датчиков и сенсоров, которые обеспечивают оператора критически важной информацией о параметрах полета, состоянии системы и технических показателях дрона во время его эксплуатации.
Эти показатели телеметрии пилот настраивает индивидуально под свои потребности. Это можно сделать в программном обеспечении Betaflight в разделе OSD. OSD — On Screen Display (экранное меню) — функция, которая накладывает важную информацию о полете прямо на ваше видео с камеры дрона с дальнейшим выводом на экран очков либо монитора.
Статья по выбору FPV очков ⇒ ОЧКИ ТОП 5
Это позволяет пилоту мониторить состояние дрона в реальном времени без отвлечения от управления. Для удобства я разделил телеметрию на 6 групп из 21 параметра.
Группа первая — Аккумуляторы
Эти важные показатели показывают, сколько заряда имеет аккумулятор, напряжение на каждой банке и силу тока.
Battery Voltage — Напряжение аккумулятора
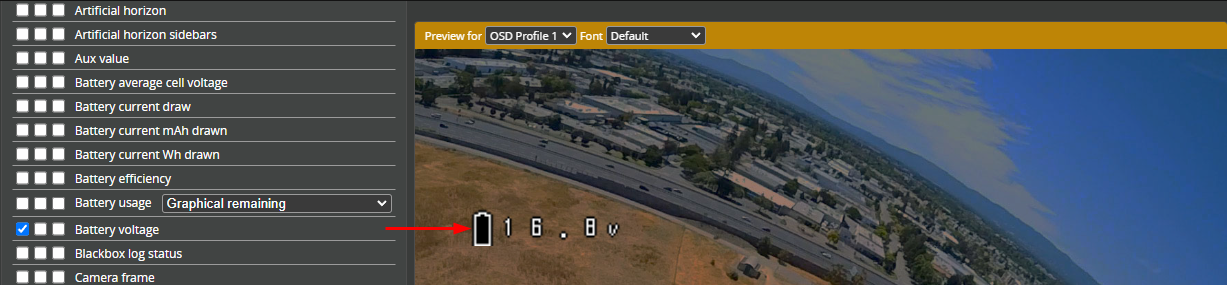
Battery Voltage — это отображение текущего напряжения аккумулятора во время полета дрона. Измерение напряжения происходит с помощью специального датчика напряжения, который находится во Flight Controller (полетном контроллере). Это один из самых важных показателей заряда аккумулятора, за которым пилот постоянно следит. Он дает возможность правильно планировать время полета и момент посадки. Этот параметр обязателен для использования. [Обязательный параметр]
Battery Average Cell Voltage — среднее напряжение элементов (банок) аккумулятора

Battery Average Cell Voltage. Этот параметр работает в паре с параметром Battery Voltage, отличие его заключается в том, что он отображает среднее значение напряжения элементов аккумулятора. Датчики постоянно считывают напряжение каждого элемента во время работы дрона. Flight Controller получает эти данные и вычисляет среднее значение, чтобы дать обобщенную информацию о состоянии аккумулятора.
Это очень удобно для тех, кто постоянно использует разные аккумуляторы по напряжению, и этот параметр позволяет пилоту удобно оценивать остаток заряда аккумулятора. Он суммирует значения каждого элемента и делит его на количество элементов аккумулятора. При этом он не может отследить испорченный элемент, который сильно просел во время полета.
Например, возьмем аккумулятор 4S. Полностью заряженный будет иметь напряжение 16,8 Вольт. Разряженный будет иметь напряжение 14 Вольт.
Во время полета аккумулятор будет иметь на элементах следующие значения: 4,1 Вольта, 3 Вольта, 4 Вольта, 3,9 Вольта. Он выдаст среднее значение напряжения в 3,75 Вольта на каждый элемент. Вы подумаете, что аккумулятор еще имеет заряд и начнете дальше летать, но значение общего напряжения в 15 Вольт, которое быстро появится, покажет, что с аккумулятором точно что-то не так.
Поэтому важно наблюдать за обоими параметрами напряжения: как общим, так и за каждый элемент. Этот параметр обязательно использовать в паре с общим значением напряжения. [Обязательный параметр]
Battery Current Draw — потребление тока от аккумулятора

Battery Current Draw Потребляемый ток измеряется датчиком тока на ESC (регуляторе скорости), который обычно подключается к вашему флайтконтроллеру. Этот параметр означает количество электрического тока, который отдает аккумулятор на дрон в реальном времени. Он измеряется в амперах (А).
Измерение потребления тока помогает определить, не перегружен ли аккумулятор. Это важно для предотвращения перегрева или повреждения аккумулятора. Потребление тока также отражает, сколько энергии потребляют двигатели, особенно во время интенсивных маневров, таких как различные ускорения или подъемы.
Эта информация помогает пилоту лучше понять энергетические потребности дрона. Анализ данных потребления тока после полета может указать на необходимость оптимизации настройки дрона или выбора более эффективных компонентов. Для тех, кто был вынужден установить на дрон аккумулятор с меньшим рейтингом разряда (C-rating), можно отслеживать силу тока и не допускать превышения значения тока, которое может навредить аккумулятору.
Этот параметр обязателен для использования. [Обязательный параметр]
Battery CURRENT mAh draw — Потребление тока от аккумулятора в мА·ч

Battery CURRENT mAh draw Параметр показывает, сколько энергии потреблено в течение полета.
Это помогает пилоту понять, насколько быстро расходуется заряд аккумулятора. Он измеряется в мА·ч (миллиампер-часах) и является полезным для оценки энергопотребления дрона и планирования полетов. Предположим, ваш дрон потребляет в среднем 20 А во время полета.
Если полет длится 10 минут или 1/6 часа (~0.167 ч), общее потребление тока будет по следующей формуле: 20 А умножить на (1/6) ч = 3,33 А·ч или 3330 мА·ч. Но главное не забывать о том, что аккумуляторы имеют рабочую емкость и остаточную.
Предположим, ваш аккумулятор имеет номинальную емкость 1000 мА·ч. Полностью заряженный будет иметь 4,2 В на каждый элемент. Это будет 1000 мА·ч, то есть 100% емкости.
При напряжении 3,7 В остаток емкости составит около 50-60%. При крайнем напряжении 3,5 В остаток емкости будет около 20-30%. То есть из общей емкости аккумулятора рабочая емкость составит 70%.
То есть из общей емкости аккумулятора рабочая емкость составит 70%, а это 700 мА·ч из 1000 мА·ч, и 30%, то есть 300 мА·ч - остаточная емкость.
Поэтому рассчитывайте общую емкость своего аккумулятора с учетом 30% "резерва". Этот параметр не является обязательным и используется по желанию пилота. [Необязательный параметр]
Вторая группа — Радиоуправление дроном
Эти параметры информируют пилота о качестве и надежности радиосвязи радиоаппаратуры с приемником на дроне.
RSSI dBm Value — RSSI (Received Signal Strength Indicator)
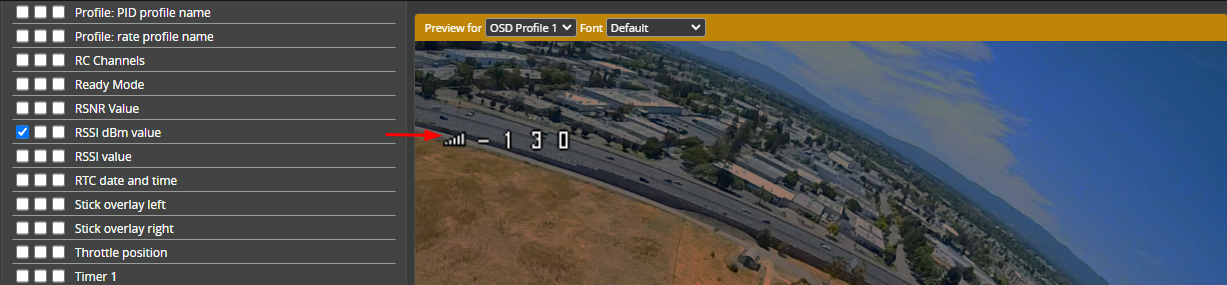
RSSI dBm Value RSSI (Received Signal Strength Indicator) измеряет силу принятого сигнала приемником от передатчика. Он выражается в dBm — децибелах на милливатт, что является логарифмической шкалой, используемой для измерения силы сигнала.
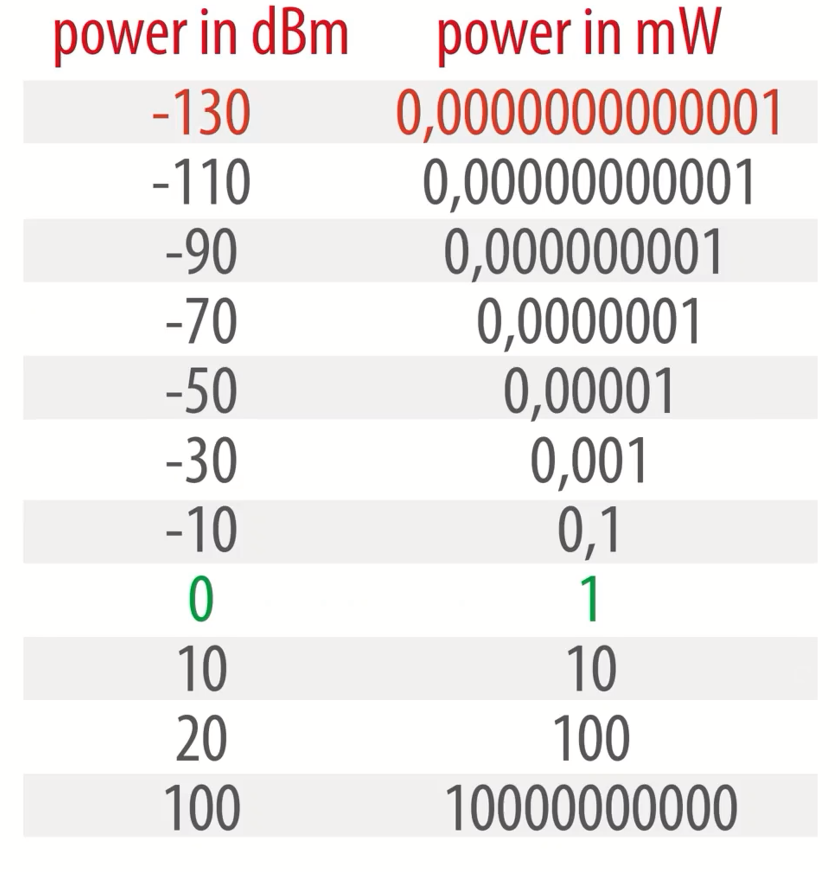
Использование dBm лучше, чем милливатт, поскольку приемники могут обнаруживать невероятно слабые сигналы, которые сложно выразить в милливаттах. Например, мы можем видеть такие значения, как –120 dBm. Гораздо проще использовать децибелы, когда в милливаттах так много нулей.
RSSI начинается с нуля как наивысшего значения и снижается, когда сигнал уменьшается. –130 dBm означает, что сигнал вот-вот будет потерян между приемником и передатчиком. Однако на самом деле наименьший RSSI будет зависеть от характеристик приемника и его параметров наименьшего приема сигнала от передатчика.
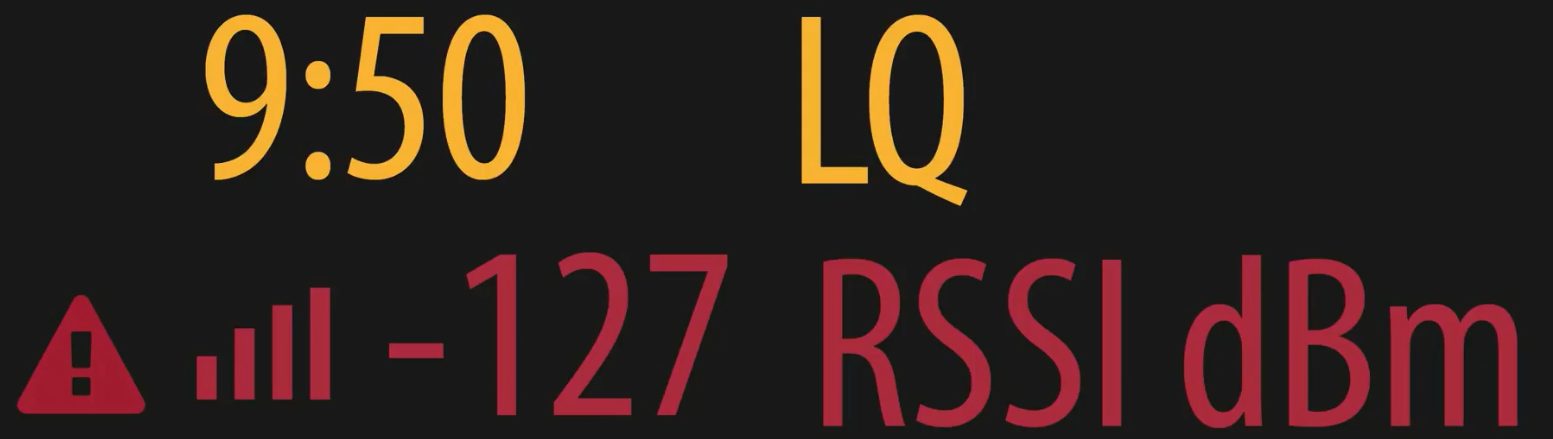
RSSI в dBm может предупреждать пилота о низких значениях сигнала, что может указывать на приближение к пределу дальности или других проблемах с сигналом. RSSI в dBm помогает оценить, сколько еще можно продолжать полет, прежде чем сигнал станет слишком слабым.

Этим параметром пользуются преимущественно профессиональные пилоты, которые игнорируют похожий параметр под названием RSSI value (в%), который создавался для старых протоколов типа FrSky; использовать его на современных протоколах типа Crossfire и LRS не очень корректно.
Поэтому рекомендация — выставить его обязательно для того, чтобы контролировать силу сигнала от передатчика до приемника и понимать, насколько качественно у вас сигнал с дроном. Этот параметр является обязательным для всех пилотов. [Обязательный параметр]
Link Quality — Качество связи

Link Quality — это качество связи, измеряемое в процентах неповрежденных данных, которые проходят через приемник.
Link Quality отображается в формате, например, 9:100, где первое число представляет RFMD (RF Mode — режим работы радио) или режим RF, а второе число представляет фактическое значение качества в процентах от 0 до 100. Для ExpressLRS вы можете посмотреть RFMD, соответствующие режимы и скорость пакетов в следующей таблице.
ExpressLRS
| RFMD | Modes | Packet Rates | Sensitivity Limits |
|---|---|---|---|
| 13 | F1000 | 1000Hz | -104dBm |
| 12 | F500 | 500Hz | -104dBm |
| 11 | D500 | 500Hz | -104dBm |
| 10 | D250 | 250Hz | -104dBm |
| 9 | 500Hz | 500Hz | -105dBm |
| 8 | 333Hz Full | 333Hz | -105dBm |
| 7 | 250Hz | 250Hz | -108dBm |
| 6 | 200Hz | 200Hz | -112dBm |
| 5 | 150Hz | 150Hz | -112dBm |
| 4 | 100Hz Full | 100Hz | -112dBm |
| 3 | 100Hz | 100Hz | -117dBm |
| 2 | 50Hz | 50Hz | -120dBm (900Mhz) -115dBm (2.4Ghz) |
| 1 | 25Hz | 25Hz | -123dBm |
Для RFMD 9 скорость пакетов, согласно таблицы, может составлять 500 Гц (100%). [9:100]
TBS CrossfireДля Crossfire RFMD достигает |
Если вам приходится выбирать между Link Quality и RSSI dBm ⇒ Link Quality может быть немного важнее, поскольку это более прямой показатель того, насколько надежна радиосвязь. Хорошей аналогией для этого является представление о приемнике как о человеке, с которым вы пытаетесь поговорить в шумном ресторане, а вы — как передатчик. Во время разговора громкость вашего голоса — это RSSI и dBm.
Если ваш собеседник слышит вас и понимает все, что вы ему говорите, в этом случае Link Quality будет 100%. Важно не то, насколько громко вы говорите, а то, сколько слов другой человек может услышать и понять от вас. Если в ресторане будет слишком шумно, ваш голос будет слышен, но не будет понятно ни одного слова, то в этом случае у вас высокий RSSI и dBm, но 0% Link Quality.
Link Quality, как правило, резко падает в конце диапазона, тогда как RSSI и dBm имеют тенденцию к постепенному снижению более предсказуемым способом. Лучше всего использовать как Link Quality, так и RSSI и dBm, чтобы понять состояние радиосвязи.

- Высокий Link Quality, высокий RSSI и dBm — это означает, что у вас сильная радиосвязь.
- Низкие Link Quality, высокий RSSI dBm — это означает, что у вас шумная радиочастотная среда.
- Высокий Link Quality, низкий RSSI и dBm — означают, что вы очень далеко и нужна осторожность, поскольку вы приближаетесь к концу диапазона. Если приемник находится очень близко к передатчику, это может свидетельствовать о проблемах с антенной.
- Низкий Link Quality, низкий RSSI и dBm — означают конец диапазона, и вам следует вернуть дрон назад, поскольку, вероятно, сигнал пропадет .
В идеале Link Quality должен составлять 100%, но нормально, если он будет ниже этого значения. Например, Link Quality 50% означает, что проходит только половина пакетов. Несмотря на это, вы, вероятно, все еще сможете летать. Например, на частоте 500 Гц все еще поступает 250 команд в секунду.
Наименьший Link Quality, на который вы должны реагировать, является субъективным и зависит от того, насколько вы готовы рискнуть.
Вы точно не хотите ждать, пока он опустится слишком низко и дрон станет неуправляемым, но в приведенном выше примере 50% при 500 Гц может быть приемлемым. Дело в том, что когда ваш Link Quality падает, это является признаком предупреждения. Могут быть помехи, которые повреждают радиоданные, или вы приближаетесь к концу диапазона, или какие-то другие проблемы.
Если ваш Link Quality падает примерно до 50-70%, следует обратить внимание на RSSI dBm.
Если RSSI dBm также низкий, в пределах 10 дБ до предела чувствительности для вашей скорости пакетов, было бы хорошей идеей вернуться назад. Если RSSI dBm остается высоким, продолжайте контролировать Link Quality и посмотрите, улучшится ли он.

Если нет, вам следует вернуться назад, поскольку могут возникнуть помехи и ситуация может ухудшиться, если вы продолжите лететь.
Обязательно возвращайтесь, когда Link Quality падает ниже 20%, поскольку увеличение задержки затруднит контроль дрона. Наименьший допустимый RSSI dBm зависит от скорости передачи пакетов и частоты сигнала.

Более низкая скорость передачи пакетов и более низкие частоты имеют более чувствительный прием, например. Наименьшее теоретическое значение RSSI dBm для 2,4 ГГц и 500 Гц (Pocket Rates) составляет - 105 дБм, но для 915 МГц и 25 Гц (Pocket Rates) это - 123 дБм, что лучше для пилотов на большой дистанции. Важно не недооценивать разницу в несколько дБм, поскольку каждые 6 дБм удваивают диапазон.
Например, в ExpressLRS снижение скорости пакетов с 500 Гц (–105 дБм) до 150 Гц (–112 дБм) фактически удваивает диапазон и больше. Вот таблица пределов чувствительности (наименьших значений) RSSI dBm для каждого радиочастотного режима скорости пакетов в ExpressLRS.
| Modes | Sensitivity Limit |
|---|---|
| D250/D500/F500/F1000 | -104dBm |
| 500Hz/333Hz Full | -105dBm |
| 250Hz | -108dBm |
| 150Hz/200Hz/100Hz Full | -112dBm |
| 100Hz | -117dBm |
| 50Hz | -117dBm |
| 25Hz | -123dBm |
Если RSSI dBm опустится ниже этих пределов, ваш дрон упадет.
Этот параметр обязателен для применения. [Обязательный параметр]
Третья группа — Видеопередатчики
Эти параметры помогают пилоту следить за каналом, на котором работает его видеопередатчик, и его мощностью.
VTX Channel — канал видеопередатчика

Этот параметр помогает пилоту следить за каналом, на котором работает его видеопередатчик, и его мощностью.
Например, у вас следующие значения: R:2:250.

Значение R соответствует band (диапазону), в котором работает видеопередатчик.
Цифра 2 означает номер канала, то есть передатчик работает на частоте 5695 МГц.

Цифра 250 указывает, на какой мощности в милливаттах работает видеопередатчик.
Этот параметр обязателен для использования. [Обязательный параметр]
Четвертая группа — Помощники полета
Позволяют пилоту следить за временем полета, газом и режимами полета.
Throttle Position — положение газа в процентах

Throttle Position Этот параметр означает текущее положение газа в процентах, которое регулирует количество энергии, передаваемой к двигателям, и соответственно меняет скорость вращения пропеллеров.
Измеряется в процентах от 0 до 100. Высшие значения газа означают большую скорость полета. Оптимальное использование газа помогает уменьшить потребление энергии и продлить время полета.
После полета данные о Throttle позволяют проанализировать, насколько эффективно использовалась мощность двигателей во время различных маневров. Это может быть полезным для совершенствования навыков управления и оптимизации настройки дрона. Для начинающих пилотов информация о Throttle помогает понять, как изменения положения газа влияют на поведение дрона.
Это важный аспект тренировок и совершенствования техники управления. В некоторых системах телеметрии данные о Throttle используются для настройки режимов автопилота, что позволяет дрону автоматически поддерживать стабильный уровень высоты или скорости. Этот параметр не является обязательным и используется по желанию пилота. [Необязательный параметр]
Timer: remaining time estimate / Timer — оставшееся время полета

remaining time estimate Помогает планировать полеты, учитывая время, которое можно провести в воздухе. Используется для определения общей продолжительности полета дрона. Позволяет анализировать, как время полета меняется во время различных маневров и условий полета.
Однако время полета может существенно отличаться в зависимости от того, насколько быстро вы летите и насколько активно используете газ.
Чтобы правильно интерпретировать показатель времени полета, пилоту нужно сделать с десяток вылетов при разных условиях, чтобы в среднем понимать возможности времени полета дрона в тех или иных условиях. Например, используя свой дрон для фристайла на аккумуляторе 6S 1300 мА·ч, мой дрон может проработать 3 минуты при агрессивном полете и максимум 8 минут во время спокойных полетов.
Это позволяет мне понимать время полета своего дрона с определенным аккумулятором и условий полета.
Параметр Timer (Flight Timer) обязателен для использования. [Обязательный параметр]
Armed/Disarmed — режим запуска двигателей

Armed/Disarmed Это режим, который определяет, запущены ли двигатели дрона, или нет. Armed означает, что двигатели с пропеллерами дрона запущены и дрон готов подняться в воздух и полететь. Активируется перед взлетом и остается в этом состоянии во время всего полета.
Disarmed означает, что двигатели выключены и пропеллеры не вращаются. Если активировать режим Armed и дрон поднялся или уже летит в воздухе и нажать в это время режим Disarmed, дрон в воздухе выключит двигатели и упадет. Disarmed предотвращает случайный запуск дрона и возможные аварии.
После посадки дрона нужно перевести его с помощью тумблера из режима Armed в Disarmed. Фактически эти два режима запускают двигатели на дроне или выключают их. Этот параметр обязателен для использования, особенно тем, кто запускает свой дрон на расстоянии, чтобы понять, запущены ли двигатели на дроне, или нет. [Обязательный параметр]
Fly Mode — режим полета

Fly Mode Показывает выбранный пилотом режим полета, в котором сейчас находится дрон. Каждый режим имеет свои особенности и назначение, что позволяет пилоту адаптировать поведение дрона к определенным ситуациям. Cуществует три основных.
- Angle Mode (Режим угла) автоматически стабилизирует дрон по горизонтали, подходит для новичков и съемок, где нужна стабильность.
- Horizon Mode (Горизонт) — комбинация стабилизированного режима и ручного управления, позволяет выполнять трюки с автоматическим выравниванием.
- Acro Mode (Акро) — полностью ручное управление без стабилизации, подходит для опытных пилотов и выполнения сложных маневров и трюков высшего пилотажа.
Разные режимы полета имеют разные уровни стабилизации и контроля. Знание выбранного режима помогает пилоту быть готовым к специфическим условиям управления. Этот параметр важен для тех, кто летает в разных режимах, и чтобы не перепутать их, лучше выносить этот параметр в телеметрию. [Необязательный параметр]
Пятая группа — Система автоматического возврата дрона домой
Эти параметры помогают пилоту следить за положением, расстоянием, скоростью, высотой дрона и записывают последние координаты для его поиска при потере связи с ним.
GPS Satellites — количество спутников

GPS Sats Этот параметр показывает количество GPS-спутников, которые были захвачены GPS-модулем дрона для навигации.
Точно определенное местоположение GPS позволяет дрону знать свое точное положение на земле. Высшее количество спутников обеспечивает более точную навигацию позиции дрона на местности и уменьшает погрешность в его размещении на ней. Для корректной работы нужно поймать минимум 8 спутников.
В случае потери сигнала или низкого заряда аккумулятора дрон автоматически возвращается к точке старта, используя GPS-координаты. Дрон может летать по заранее определенным точкам маршрута (Waypoints), что особенно полезно для съемок или обследований территорий. Для тех, у кого есть в дроне GPS-модуль, этот параметр обязателен для применения. [Обязательный параметр]
GPS Latitude — широта и GPS Longitude — долгота

Это координаты, которые используются для определения точного расположения вашего FPV-дрона на земной поверхности. Эти параметры являются ключевыми для навигации и позиционирования дрона.
GPS Latitude — широта измеряется в градусах от 0° до 90° на север и от 0° до −90° на юг от экватора. Она показывает, как далеко на север или юг от экватора находится объект. Используется для определения северного или южного расположения дрона.
GPS Longitude — долгота измеряется в градусах от 0° до 180° на восток и от 0° до −180° на запад от гринвичского меридиана. Показывает, как далеко на восток или запад от гринвичского меридиана находится объект. Используется для определения восточного или западного расположения дрона.
Зная широту и долготу, пилот может точно определить местонахождение дрона. Использование этого параметра позволяет по последним координатам из DVR (записи с очков/устройства) найти дрон. Его желательно использовать для критических ситуаций в случае поиска дрона или для привязки позиции дрона к местности. [Необязательный параметр]
GPS Speed — измерение скорости дрона с помощью GPS-координат

GPS Speed Этот параметр дает представление пилоту о скоростных возможностях дрона во время полета. Это полезно для тех, кто занимается видеосъемками и нужно контролировать скорость дрона, например, за автомобилем.
Этот параметр используется по желанию. [Необязательный параметр]
Home Direction — направление возвращения дрона домой

Параметр Home Direction помогает определить направление, в котором дрон должен вернуться к точке старта (Home) после завершения полета или при возникновении непредвиденных ситуаций.
Он выглядит как стрелочка, которая всегда направлена на место запуска дрона. Если она во время полета показывает вверх, это означает, что дрон летит к месту запуска. Если вниз — означает, что вы движетесь от места запуска.
Некоторые дроны оснащены функцией автоматического возврата домой — Return to Home (RTH), которая активируется в случае снижения уровня заряда аккумулятора, потери сигнала или по команде пилота. В таких случаях параметр Home Direction помогает дрону выбрать правильное направление для возвращения дрона к точке старту. Для активации этого параметра дрон должен быть обязательно оснащен компасом.
Очень часто он встроен в GPS-модуль и требует калибровки и правильного размещения на дроне относительно его ориентации на плате.
Именно он является одним из ключевых компонентов, который отвечает за систему возврата дрона домой, предоставляя флайтконтроллеру данные об ориентации в пространстве дрона (где его перед, где зад) и в каком направлении наклонять ось pitch для возвращения. Без компаса дрон будет возвращаться домой боком, рисуя в воздухе круги, спирали, и улетать от места запуска.
Этот параметр обязательно нужен для использования функции автоматического возврата дрона к месту запуска с использованием компаса. [Обязательный параметр]
Home Distance — расстояние дрона от места запуска

Home Distance показывает текущее расстояние дрона от точки старта или точки, где был активирован режим Home.
Это позволяет пилоту постоянно контролировать, насколько далеко дрон удалился от начальной точки. Знание расстояния до точки старта помогает пилоту планировать маршрут возвращения. Это особенно важно, если дрон находится на значительном расстоянии и нужно обеспечить достаточный запас аккумулятора для безопасного возвращения.
В случае использования функции автоматического возврата домой (Return to Home — RTH), параметр Home Distance помогает системе точно рассчитать путь назад к точке старта, учитывая текущее расстояние. Для использования функции RTH обязательно нужно иметь на дроне GPS-модуль. Этот параметр обязательно нужен для использования автоматического возврата дрона к месту запуска с использованием GPS.
Если его не вывести на OSD, это не означает, что он не будет работать. Это сделано для того, чтобы вам было наглядно понятно, летит ли дрон к вам или нет. [Обязательный параметр]
Altitude/ Baro Alt — Высота (по барометру)

Altitude Барометр определяет высоту дрона относительно точки взлета, измеряя давление воздуха. Этот датчик в реальном времени показывает высоту дрона относительно места его запуска.
Этот показатель полезен для тех, кто хочет контролировать высоту своего полета. Например, есть определенные региональные ограничения относительно полетов дронов до определенной высоты и т.д. Если дрон будет опускаться ниже места запуска, этот показатель будет иметь отрицательное значение.
Дроны с барометром могут автоматически регулировать свою высоту, сохраняя ее на заданном уровне без необходимости постоянного вмешательства пилота. При использовании функции автоматического возврата дрона домой он встроен во флайтконтроллер. Система возврата домой может корректно работать только при наличии барометра, GPS-модуля и компаса.
Без одного из этих компонентов эта функция адекватно работать не будет. Без барометра дрон начнет падать при активации системы возврата домой. Этот параметр обязательно нужен для использования автоматического возврата дрона к месту запуска. [Обязательный параметр]
Compass bar (Heading) — Компас

Параметр Compass bar (Heading) может отображать информацию о направлении движения дрона относительно сторон света, что помогает быстро сориентироваться в пространстве и принимать правильные решения во время полета в случае потери связи со спутниками. Например, вы постоянно летели с юга на север и потеряли связь со спутниками. И система автоматического возврата не будет работать.
Таким образом, если вы будете возвращаться на юг, вы будете лететь к себе, ориентируясь лишь по компасу. Эти параметры выводятся по желанию пилота. [Необязательный параметр]
Шестая группа — Другие полезные дополнительные параметры
Crosshair — Прицельная сетка / Перекрестие

Crosshair Помогает пилоту ориентироваться в пространстве, указывая на центр экрана.
Это особенно полезно при выполнении сложных маневров или полетов в ограниченном пространстве. Во время съемки видео или фотографий прицел помогает пилоту точно наводить камеру на снимаемый объект. Это важно для достижения четкого и стабильного кадра.
Crosshair облегчает пилотирование при быстрых полетах. Особенно, когда дрон движется на большой скорости или меняет направление во время прохождения ворот или трассы. Прицельная сетка помогает держать ориентацию и контролировать траекторию полета.
Эти параметры пилот выставляет по желанию. [Необязательный параметр]
Craft Name — Название дрона

Craft Name Название помогает пилоту легко идентифицировать конкретный дрон среди других, особенно если у вас есть несколько дронов. Это удобно при управлении большим количеством дронов или во время полетов на соревнованиях.
Для каждого дрона могут быть настроены индивидуальные параметры полета, и название дрона помогает сохранять эти настройки отдельно.
Это позволяет быстро выбирать нужные конфигурации без необходимости перенастраивать все параметры заново. Название дрона позволяет вести учет полетов, обслуживания и других важных событий для каждого дрона отдельно.
Это полезно для анализа производительности и планирования технического обслуживания. Многие современные программы для управления дронами используют параметры Craft Name, где отображается информация о дроне на экране или в приложениях, что упрощает управление и мониторинг. Этот параметр пилоты выставляют по желанию. [Необязательный параметр]
Warnings — предупреждения
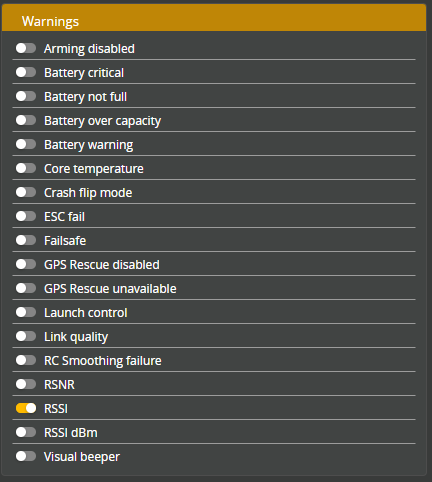
Параметры Warnings в FPV-дроне являются критическим инструментом для обеспечения безопасности полета и оперативного информирования пилота о потенциальных проблемах.
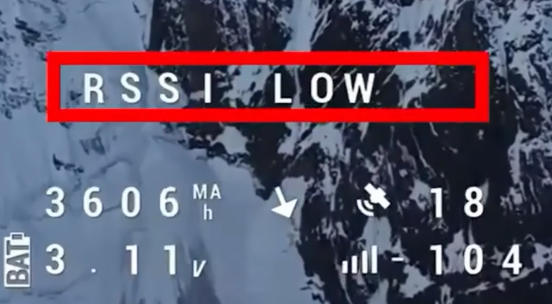
Параметры Warnings помогают оперативно информировать пилота о любых опасностях, возникающих во время полета, таких как низкий уровень заряда аккумулятора, слабый сигнал связи или превышение допустимой высоты, ошибки в системах навигации, проблемы с двигателями или неисправности сенсоров. Этот параметр обязателен для использования. [Обязательный параметр]
Подробно о параметрах вкладки OSD
- Обучение Обучение | Курсы
- Понедельник, 13 октября 2025