
Навигационные режимы INAV
Navigation modes
Эта страница перечисляет и объясняет все различные навигационные режимы полёта INAV:
- NAV ALTHOLD – удержание высоты (Altitude hold)
- NAV POSHOLD – удержание 3D‑позиции (3D Position hold)
- NAV MC BRAKING – более быстрое торможение в POSHOLD
- NAV COURSE HOLD – удержание курса (Course Hold)
- NAV CRUISE – удержание курса + удержание высоты (Course Hold + Altitude Hold)
- NAV RTH – возврат домой (Return to home)
- NAV WP – автономная миссия по путевым точкам
- WP PLANNER – планировщик миссии по путевым точкам «на лету»
- GCS NAV – управление от наземной станции (Ground control station)
См. также страницу с ненавигационными режимами.
Условия для появления навигационных режимов в Configurator
В целях безопасности при первичной настройке требуются следующие условия, прежде чем навигационные режимы появятся во вкладке Modes конфигуратора:
- Акселерометр (ACC) и магнитометр (MAG) корректно откалиброваны. Учтите также другие специфические требования.
- GPS для навигации и телеметрии включён, а GNSS‑модуль привязан к последовательному порту.
- Доступен корректный источник высоты (барометр и/или GPS).
После начальной настройки навигационные режимы останутся видимыми во вкладке Modes для удобства владельцев плат, у которых USB не питает барометр. Это требование введено, чтобы навигационные режимы не были «потеряны» в DIFF‑файле, если пользователь сохраняет DIFF без подключённой полётной батареи.
При арминге на поле или при стендовых проверках недостаточно просто иметь 6 спутников, чтобы считать это «валидным 3D‑фиксом». Также требуется приемлемая точность (низкий HDOP или EPH/EPV), чтобы прошивка могла надёжно использовать GPS‑данные для навигации.
По умолчанию установлено nav_extra_arming_safety = ALLOW_BYPASS. Это позволяет с помощью стиковой команды на аппаратуре обойти проверки при арминге. Но помните: в этом случае домашняя точка не будет сохранена, и RTH не будет корректно работать!
Помощь навигационных режимов
- Все навигационные режимы мультикоптеров самодостаточны. Например, в режимах RTH, POSHOLD, CRUISE и WP не нужно дополнительно включать ANGLE, ALTHOLD или Heading‑control. Прошивка сама включает всё, что нужно для работы выбранного режима.
- То же самое относится к самолётам (Fixed Wing). Включение RTH, LOITER, CRUISE или WP также автоматически включает TURN ASSIST.
TURN ASSISTANCE добавляет управляющие сигналы по тангажу (elevator) и рысканию (rudder), когда самолёт накренён, чтобы обеспечить координированный разворот.
Для самолётов сила этой помощи настраивается параметрами fw_turn_assist_pitch_gain ↩ и fw_turn_assist_yaw_gain↩
В более новых версиях INAV есть некоторая гибкость в выборе датчиков, используемых для навигации у мультикоптеров и самолётов. Но общее правило таково: чем больше датчиков включено, тем точнее будет навигация.
Обозначения для таблицы ниже:
- ✓ – используется по умолчанию;
- O – опционально (для коптеров по умолчанию включено, но можно отключить с потерей точности; для самолётов можно включить для большей точности по курсу).
Задействованные модификаторы и датчики
| Модификатор / датчик | COURSE HOLD | CRUISE | POSHOLD | WAYPOINT | RTH |
|---|---|---|---|---|---|
| ANGLE | ✓ | ✓ | ✓ | ✓ | ✓ |
| ALTHOLD | ✓ | ✓ | ✓ | ✓ | |
TURN ASSIST - FW only |
✓ | ✓ | ✓ | ✓ | ✓ |
MAG – MC: ✓/O, FW: O |
✓ | ✓ | ✓ | ✓ | |
BARO - MC/FW ✓/ MC/FW O |
✓ | ✓ | ✓ | ✓ | |
| GNSS | ✓ | ✓ | ✓ | ✓ | ✓ |
NAV ALTHOLD – Удержание высоты
ALTHOLD сам по себе не является отдельным режимом полёта. Это модификатор, который при активации вместе с режимом полёта удерживает текущую высоту аппарата.
Ниже приведены замечания по ALTHOLD для разных типов платформ.
Lidar: когда оборудование настроено, код ALTHOLD автоматически использует лидар, если аппарат находится в его рабочем диапазоне по высоте над рельефом. На мультикоптере это также можно задействовать включением Surface Mode.
Внимание.
Не рекомендуется использовать ALTHOLD совместно с ACRO или HORIZON ни на мультикоптере, ни на самолёте. ALTHOLD не учитывает крены более 90° и перевёрнутые фигуры. Единственный самостоятельный режим, с которым корректно применять ALTHOLD – это ANGLE.
Продвинутые пилоты мультикоптеров могут использовать ALTHOLD вместе с ACRO, но только если хорошо контролируют ориентацию модели и её поведение.
Высота рассчитывается вертикальным оценщиком позиции INAV и может основываться на данных от четырёх датчиков. В лог Blackbox записывается как navPos[2].
Использование ALTHOLD на мультикоптере (MC)
Работа и управление.
Если использовать только ALTHOLD на мультикоптере, минимально требуется барометр для удержания постоянной высоты.
Активация AIRMODE вместе с ANGLE даёт дополнительную стабильность при быстром снижении. Но при очень высоком отношении тяги к весу полезно перед посадкой отключать AIRMODE, чтобы избежать переворота из‑за «разгона» I‑составляющей при касании.
Скорость набора/снижения в ALTHOLD:
- Стик газа изменяет скорость набора/снижения до лимита
nav_mc_manual_climb_rate. ↩ - Максимальные скорости набора/снижения в автономных режимах задаются
nav_mc_auto_climb_rate. ↩ - Нейтральное положение газа для удержания высоты –
nav_mc_althold_throttle(варианты: STICK, HOVER, MID_STICK). ↩
При включении ALTHOLD INAV отправляет значение nav_mc_hover_thr ↩ на моторы в качестве стартовой точки регулятора высоты. Если ваш коптер не висит около стандартных 1500 µs, это значение нужно подстроить. Иначе модель будет медленно набирать или терять высоту.
nav_mc_hover_thr нужно установить примерно в пределах ±2 % от реального газа висения. Контроллер высоты компенсирует только небольшой дрейф — эта настройка даёт «базовую точку» для регулятора, зависящую от тягово‑весового отношения.
Как подобрать газ висения:
- В режиме ANGLE попробуйте удерживать аккуратный висение.
- Посмотрите реальное значение газа в логе, на OSD или по LUA‑телеметрии на передатчике.
- После посадки введите это значение в
nav_mc_hover_thr.
Так как напряжение батареи падает в полёте, полезно включить feature THR_VBAT_COMP ↩ — компенсацию тяги по напряжению.
alt_hold_deadband ↩ создаёт «мёртвую зону» вокруг значения nav_mc_althold_throttle, чтобы мелкие движения стика не вызывали изменения высоты. Если ALTHOLD включён при нулевом газе, INAV смещает нейтральную точку чуть вверх, чтобы вы могли , а не только набирать высоту.
Перевозка полезной нагрузки (cine‑нагрузка). Если коптер летает с разными весами (например, разные камеры), газ висения нужно подстраивать под каждый вес, чтобы POSHOLD корректно держал высоту.
nav_mc_hover_thr находится внутри battery_profile, поэтому можно задать до трёх профилей с разными значениями газа висения под известные веса.
Перед взлётом зайдите в CMS‑меню OSD и выберите подходящий battery_profile с нужным nav_mc_hover_thr.
OSD‑индикатор коррекции высоты. В OSD рядом со значением высоты появляется специальный символ, когда стик газа отклонён для изменения высоты. Как только вы центрируете газ и новая высота стабилизируется — символ исчезает.
Связанные параметры для мультикоптеров (во вкладке Advanced Tuning):
Только в CLI:
Подробнее: Multicopter navigation PID tuning.Multicopter navigation PID tuning.
Использование ALTHOLD на самолёте (FW)
INAV управляет углом тангажа и тягой. Считается, что высота примерно удерживается при тангаже 0°. Если нужно набирать высоту, INAV увеличивает газ, при снижении – уменьшает газ, и самолёт планирует. Сила этой «связки» задаётся nav_fw_pitch2thr.
Самолёт нужно оттриммировать через Auto Level Trim (fw_level_pitch_trim ↩) так, чтобы он летел ровно и в MANUAL, и в ANGLE при отпущенных стиках.
Связанные параметры для самолётов (во вкладке Advanced Tuning):
nav_fw_min_thr= 1200 ↩nav_fw_cruise_thr= 1450 ↩nav_fw_max_thr= 1750 ↩nav_fw_bank_angle= 45 ↩nav_fw_climb_angle= 25 ↩nav_fw_dive_angle= 18 ↩nav_fw_pitch2thr= 11 ↩nav_fw_loiter_radius= 5000 ↩
Подробнее: Fixedwing navigation PID tuning.
NAV POSHOLD – Удержание позиции
Мультикоптер
Мультикоптер удерживает 3D‑позицию.
ALTHOLD уже активен по умолчанию и использует барометр, высоту по GNSS и акселерометр.
Вместе с этим работает HEADING HOLD на основе гироскопа, который корректируется по курсу магнитометра или GNSS, чтобы обеспечить полный 3D‑контроль позиции.
Если вы поднимаете или опускаете стик газа, коптер начнёт набирать или снижать высоту, пока стик не будет снова центрирован. После центрирования будет удерживаться новая высота. Это поведение нужно подстроить под ваше железо параметрами, описанными ранее.
Стики крена/тангажа смещают точку удержания: коптер полетит в соответствующем направлении; после отпускания стиков он остановится и будет удерживать новую позицию. Стик рыскания поворачивает коптер вокруг вертикальной оси, скорость поворота задаётся heading_hold_rate_limit.
Параметры POSHOLD настраиваются во вкладке Advanced Tuning → Multirotor Navigation.
Самолёт (LOITER)
Самолёт будет кружить по кругу (loiter), удерживая высоту, с автоматическим управлением тягой. Радиус круга задаётся nav_fw_loiter_radius. Высоту можно подправить стиком тангажа.
Направление loiter выбирается параметром fw_loiter_direction. Его можно изменять в полёте стиком рыскания или с помощью режима LOITER CHANGE на переключателе.
На радиус loiter также влияют другие факторы (см. далее на странице).
MC BRAKING – модификатор POSHOLD
MC Braking – подрежим POSHOLD, предназначенный для более быстрого торможения при отпускании стика тангажа. Он также позволяет «останавливаться» в точке окончания торможения, а не «откатываться» назад к позиции отпускания стика, как это бывает без Braking.
Условия работы MC Braking:
- Должен быть включён POSHOLD.
nav_user_control_mode = CRUISEвместо значения по умолчаниюATTITUDE.- Режим MC BRAKING выбран во вкладке Modes – либо на отдельном переключателе, либо совместно с POSHOLD.
Настройка MC Braking выполняется во вкладке Advanced Tuning → Multirotor braking mode configuration.
MC Braking опционален, так как POSHOLD на уровне навигации управляется параметром nav_user_control_mode:
- ATTITUDE: при отклонении стиков Pitch/Roll позиционный автопилот отключается, и коптер ведёт себя как в ANGLE, пока стики не вернутся в центр.
- CRUISE: позиционный автопилот всегда активен; команды стиков преобразуются в команды скорости и объединяются с удержанием позиции. Это даёт более точный 3D‑контроль, но может быть «дерганым» при плохом качестве GNSS.
CRUISE хорошо подходит для анализа скорости «отпускания» стиков, пикового торможения, замедления и точки остановки.
Однако при наклонах и поворотах точность курса/скорости GNSS может падать, поэтому в CRUISE возможны рывки или кратковременный «уход» на несколько метров, когда аппарат должен тормозить. Если нужен максимально плавный POSHOLD – выбирайте ATTITUDE.
Выбор ATTITUDE/CRUISE влияет только на POSHOLD, за исключением режимов MC CRUISE и COURSE‑HOLD, которые используют тот же базовый код, что и CRUISE, независимо от параметра.
Остальные навигационные режимы используют nav_mc_bank_angle и nav_mc_pos_deceleration_time как угол и время торможения.
NAV COURSE HOLD – Удержание курса
Course Hold доступен для мультикоптеров начиная с INAV 7.0.
При включении аппарат пытается удерживать текущий курс и компенсировать внешние воздействия (2D‑круиз). Поведение отличается для мультикоптеров и самолётов.
Мультикоптер
Курс меняется стикoм YAW или ROLL (ROLL работает так же, как YAW). Скорость увеличивается поднятием стика PITCH; скорость пропорциональна отклонению, до лимита nav_manual_speed. После возврата стика в центр достигнутая скорость сохраняется. Если перед включением режима мультикоптер уже движется, его текущая скорость сохраняется (до nav_manual_speed).
Скорость уменьшается опусканием стика PITCH; скорость снижения скорости (извините за тавтологию) пропорциональна отклонению стика так, что при максимальном отклонении замедление до остановки занимает порядка 2 секунд. Когда скорость падает ниже 0,5 м/с, позиция считается удерживаемой.
Самолёт
Направление полёта управляется стиком ROLL, как обычно, или стиком YAW, который даёт более плавное управление курсом.
Скорость разворота в COURSE HOLD/CRUISE задаётся nav_cruise_yaw_rate (скорость рыскания при максимальном отклонении стика).
Если режим используется вместе с NAV ALTHOLD, также удерживается текущая высота, фактически превращая это сочетание в CRUISE. Высота управляется как обычно: тангажом (для самолёта) или газом (для мультикоптера). ANGLE включается автоматически, обеспечивая автовыравнивание и удержание курса.
NAV CRUISE – Удержание курса и высоты
Эквивалент сочетания NAV COURSE HOLD и NAV ALTHOLD, описанного выше.
NAV RTH – Return to Home (возврат домой)
RTH пытается вернуть модель к точке арминга или Safehome. В режиме управляются и позиция, и высота.
Хотя FAILSAFE также возвращает модель к дому, использовать его как основной RTH не рекомендуется — в некоторых сценариях он даёт нежелательное поведение. FAILSAFE предназначен только для проверки того, как RTH сработает при потере радиосигнала.
Мультикоптер
По умолчанию, если коптер дальше 10 м от точки арминга или Safehome, он сначала набирает высоту в соответствии с nav_rth_climb_first, затем летит домой.
Оказавшись в пределах 1 м от точки арминга/Safehome, коптер пытается сесть в зависимости от параметра nav_rth_allow_landing (по умолчанию ALWAYS). Скорость снижения задаётся настройками nav_land. После касания посадка детектируется, и происходит разарминг.
Самолёт
Самолёт использует те же параметры RTH, что и коптер. Но если не настроен автолэнд, разумнее поставить nav_rth_allow_landing = NEVER или FS, чтобы самолёт кружил над домом, пока вы не выключите RTH и не возьмете управление.
Настройки детектора посадки:
nav_disarm_on_landingnav_land_detect_sensitivitynav_landing_bump_detection(только для мультикоптеров)
Существует несколько режимов выбора высоты полёта в RTH, см. отдельную страницу по RTH.
NAV WP – автономная миссия по путевым точкам
Режим WP позволяет аппарату выполнить заранее заданную последовательность путевых точек. Каждая точка содержит тип, широту, долготу, высоту, желаемую скорость и другие параметры поведения в миссии.
Планирование и загрузка миссий выполняются через INAV Configurator Mission Control, MWP Tools, EZ‑GUI, Mission Planner for INAV, Mobile Flight и т.п. Миссии сохраняются в ОЗУ контроллера до перезагрузки или перезаписи другой миссией; также могут быть сохранены в EEPROM (энергонезависимая память), чтобы пережить выключение питания.
При включении режима NAV WP (переключателем), коптер/самолёт начинает выполнять миссию, проходя точки по порядку. Миссию можно прервать, выключив NAV WP (для самолёта также переход в MANUAL или RTH прерывает миссию).
До INAV 4.0 миссии всегда начинались с первой точки. Начиная с INAV 4.0, можно продолжить прерванную миссию с промежуточной точки, используя nav_wp_mission_restart.
На F1 доступно до 30 точек, на F3 и выше – до 60, а с INAV 4.0 – до 120 точек.
Есть дополнительная wiki‑страница, подробно описывающая миссии, инструменты и телеметрию, а также документация по протоколу MSP навигации (MSP navigation message), где описаны дополнительные параметры, влияющие на поведение WP.
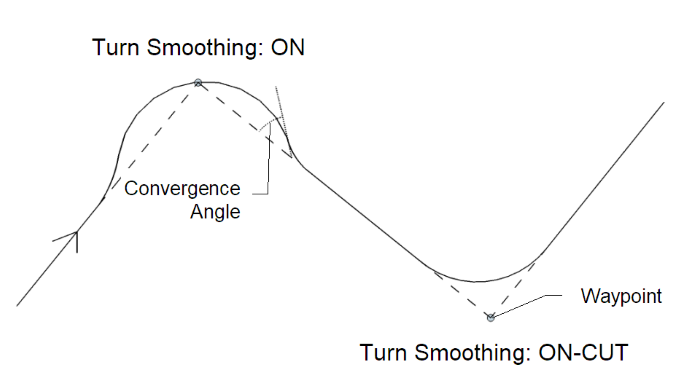
Точность слежения за линией курса и сглаживание поворотов (Fixed Wing)
Точность слежения (Waypoint tracking accuracy) заставляет самолёт быстрее выходить на линию курса и следовать по ней. Управляется двумя параметрами:
nav_fw_wp_tracking_accuracy— «стабильность» выравнивания (чем больше, тем меньше переруление и колебания);nav_fw_wp_tracking_max_angle— максимальный угол схождения к линии курса; уменьшение этого угла делает повороты более плавными, но требует большего расстояния до полного выравнивания.
Turn Smoothing сглаживает повороты в точках, включая loiter‑поворот чуть раньше прохождения точки, чтобы избежать пролёта и резких возвратов. Контролируется параметром nav_fw_wp_turn_smoothing (доступен с INAV 6.0), который имеет два варианта поведения.
Помимо параметров угла и точности трекинга, на точность поворотов в миссии WP, RTH‑Trackback или Loiter влияют и другие настройки, которые полезно подстраивать под ветреные условия или плотные маршруты. Они находятся во вкладке Advanced Tuning и в CLI.
nav_wp_radius— меньший радиус позволяет начинать поворот ближе к точке; около 600 (6 м) часто даёт хороший компромисс, особенно на участках с попутным ветром.nav_fw_bank_angle— больший крен даёт более резкий поворот (обычно 45–55°).nav_fw_control_smoothness— меньшие значения делают поведение более «резким», но ускоряют реакцию на команды курса.nav_use_fw_yaw_control— если есть руль направления или дифференциальная тяга, включение позволяет «помогать» повороту рысканием, можно уменьшитьnav_fw_bank_angleдо ~35° для более плоских разворотов.nav_fw_cruise_thr— чем выше скорость (особенно по ветру), тем больше риск пролёта точки; настройка тяг так, чтобы самолёт летел 50–70 км/ч, даёт хороший контроль.
Мультимиссии (Multi-Missions)
Multi‑missions позволяют хранить до 9 миссий одновременно в EEPROM FC. Работает только с миссиями, сохранёнными в/загруженными из EEPROM, а не с миссиями, пришедшими, например, по телеметрии.
Для работы нужно включить поле OSD MISSION INFO. Миссии планируются в Configurator Mission Control или MWP Tools и сохраняются/загружаются как обычно; есть возможность загрузки через CLI.
При включении питания MISSION INFO показывает общее число миссий. Выбор миссии — через меню CMS MISSIONS или стик крена (изменение индекса миссии в поле MISSION INFO). Если миссия с текущим номером загружена, показывается число её точек; если нет — «LOAD». Загрузить миссию можно stick‑командой Mission Load.
Также можно менять миссию в полёте через Adjustment‑функцию Multi mission Index Adjustment или режим MISSION CHANGE. В MISSION CHANGE индекс меняется переключателем WP; новая миссия становится активной при выходе из режима или отключении Adjustment.
До INAV 6.0
Можно было выбирать миссию номер 0, отображавшуюся как «WP CNT» — количество точек. При разарминге это было суммарное число точек во всех миссиях; при арминге – число точек в текущей миссии. «WP CNT» также показывал точки для миссий, загруженных не из EEPROM (например, по телеметрии). Если в EEPROM меньше двух миссий, выбирать номер миссии можно было только через CMS MISSIONS.
С INAV 6.0
Выбирать можно только миссии 1–9; «WP CNT» показывается только для миссий, загруженных не из EEPROM. Также количество точек теперь всегда относится только к выбранной миссии.
Ограничение: одноточечные RTH‑миссии (Single WP RTH) должны храниться как миссия №1; если сохранить такую миссию под другим номером, загрузка последующих миссий может обрезаться.
WP PLANNER – планировщик миссии «на лету»
WP PLANNER позволяет планировать миссию прямо в полёте: вы просто перемещаете аппарат в нужное место и сохраняете точку, затем повторяете для следующей точки и т.д.
Требуется включённое поле OSD MISSION INFO, а режим WP должен быть выключен.
При включении WP PLANNER поле MISSION INFO показывает «SAVE».
Чтобы сохранить точку в текущей позиции, переключите режим WP: если точка успешно сохранена, MISSION INFO покажет «OK», а число точек увеличится.
Перед сохранением следующей точки режим WP должен быть снова выключен (надпись сменится с «OK» на «SAVE»). Если позиционные данные невалидны (нет GPS‑фикса), MISSION INFO показывает «WAIT». Если все доступные точки использованы — показывает «FULL».
Миссию можно запустить в любой момент: выключите WP PLANNER и включите обычный WP; тогда MISSION INFO покажет «PLAN», указывая, что активна миссия, созданная WP PLANNER.
Миссию можно сбросить (если nav_mission_planner_reset = ON), переключив WP PLANNER в последовательности ON‑OFF‑ON — счётчик точек сбросится в 0. Миссию можно сохранить в EEPROM при разарминге, например stick‑командой Save WP Mission.
В отличие от других навигационных режимов, WP PLANNER работает и при разарминге. Высота точки сохраняется в абсолютных координатах (по уровню моря), поэтому если вы ставите точку на земле, её высота будет высотой этой площадки, независимо от того, откуда вы потом взлетите.
GCS_NAV – управление с наземной станции
Этот режим — разрешение для GCS (ground control station) на изменение точки удержания позиции и высоты. Сам по себе он не является отдельным полётным режимом и должен комбинироваться с другими.
Чтобы дать GCS полный контроль над аппаратом (например, follow‑me), нужно включить NAV POSHOLD вместе с GCS_NAV. Для обновления home‑позиции других режимов не требуется.
Дополнительные детали описаны на отдельной wiki‑странице по waypoint‑миссиям, инструментам и телеметрии.
Потеря GPS во время навигации
Потеря GPS оказывает следующее влияние на режимы:
- RTH и WP: запускается аварийная посадка (Emergency Landing). Выключение режимов остановит посадку и позволит управлять вручную.
- CRUISE/COURSE HOLD: удержание курса прекращается (высота в CRUISE удерживается только если ALTHOLD включен как отдельный режим).
- POSHOLD: происходит возврат в принудительный ANGLE.
- ALTHOLD: продолжит работать, если есть барометр.
Самолёт (Fixed Wing) может продолжить WP‑миссию или RTH даже при потере GNSS‑фикса, используя «оценку фикса по GPS» / Dead Reckoning. Требования и ограничения описаны на странице GPS Fix estimation – Dead Reckoning.
Emergency Landing – аварийная посадка
Аварийная посадка запускается в режимах WP и RTH, если навигационные датчики отказывают или при RTH аппарат идёт в ошибочном направлении.
Также аварийную посадку можно запустить вручную через MULTIFUNCTION или POSHOLD. Для POSHOLD нужно быстро включить/выключить режим не менее 5 раз подряд. Повтор этого действия отменяет уже начавшуюся аварийную посадку.
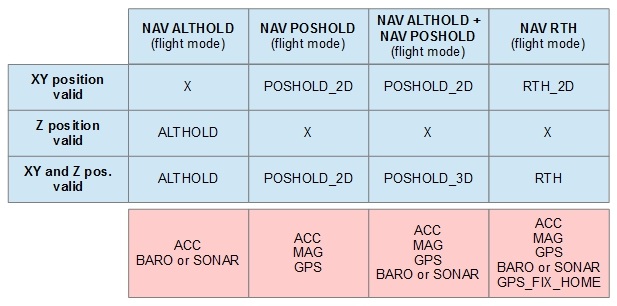
Схема переключения режимов
Существует диаграмма, иллюстрирующая взаимосвязь полётных режимов и навигационных режимов, а также требуемые для них датчики.
Расширенные CLI‑команды
См. Navigation Dev Docs для описания продвинутых CLI‑команд, связанных с навигацией.
8 / 8
ID 25