


MODES | Режимы в iNav
Режимы в INAV
Введение
Режимы полета (Flight Modes) в INAV можно разделить на две группы:
- Навигационные режимы (Navigation-Modes): используют GNSS (GPS) и другие датчики позиционирования. Для получения дополнительной информации см. страницу Navigation-Modes.
- Ненавигационные режимы (Non-Navigation-Modes): выполняют действия, которые могут полагаться только на акселерометр и гироскоп, или вовсе не использовать датчики. Описания этих режимов приведены ниже.
Некоторые режимы доступны только для определенных типов летательных аппаратов. Это обозначено следующим образом:
- FW = Fixed Wing (Самолет / Летающее крыло)
- MC = Multi-Copter (Мультикоптер)
Прокрутите вниз до раздела AUXILIARY CONFIGURATION (Настройка AUX каналов), чтобы узнать, как назначать режимы на каналы вашего радиоуправления.
Индекс ненавигационных режимов:
- ACRO MODE (режим по умолчанию)
- AIR MODE
- ANGLE
- ANGLE HOLD FW
- ARM
- ALTHOLD
- AUTO LEVEL TRIM FW
- AUTOTUNE FW
- BEEPER
- BEEPER MUTE
- BLACKBOX
- CAMERA CONTROL
- CAMSTAB
- FAILSAFE
- FLAPERON FW
- FPV ANGLE MIX MC
- HEADADJ MC
- HEADFREE MC
- HEADING HOLD
- HOME RESET
- HORIZON
- KILLSWITCH
- LEDLOW
- LOITER CHANGE FW
- MANUAL FW
- MC BRAKING MC
- MIXER PROFILE 2
- MIXER TRANSITION
- MSP RC OVERRIDE
- MULTI FUNCTION
- NAV LAUNCH FW
- OSD ALT
- OSD SW
- PREARM
- SERVO AUTOTRIM FW
- SOARING FW
- SURFACE
- TELEMETRY
- TURN ASSIST FW
- TURTLE MC
- USER1 & USER2 & USER3 & USER4 (aka PinIO)
- WAYPOINT PLANNER
ACRO MODE (Режим Акро)
Этот режим полета по умолчанию не выравнивает летательный аппарат по осям крена (roll) и тангажа (pitch). То есть, аппарат не выровняется сам, если вы отпустите стики в центр. Они работают так же, как ось рыскания (yaw): скорость вращения по каждой оси контролируется непосредственно соответствующим стиком на пульте. Если оставить стики в центре, полетный контроллер будет просто пытаться сохранить текущую ориентацию аппарата. Этот режим называется "Acro" (от "acrobatic", в OSD отображается как ACRO). Его также иногда называют режимом "Rate" (угловой скорости), так как стики управляют скоростью вращения аппарата вокруг трех осей. Режим "Acro" активен всегда, когда не включен ни один из режимов автовыравнивания.
AIR MODE
Мультикоптер:
В микшере управления моторами, при расчете Roll, Pitch и Yaw, если выходная мощность одного из моторов достигает максимума (насыщение), мощность всех остальных моторов будет снижена пропорционально. Или, когда мотор уходит ниже минимума, его выходная мощность обрезается.
Пример: У вас газ чуть выше минимума, и вы пытаетесь сделать быстрый ролл — так как два мотора не могут опуститься еще ниже, вы по сути получаете только половину мощности (половину вашего PID-усиления). Если ваша команда требует разницы более 100% между высокими и низкими моторами, низкие моторы будут обрезаны, что нарушит симметрию баланса моторов из-за неравномерного снижения усиления.
Здесь вступает в работу MC Airmode. Он позволяет осуществлять полную PID-коррекцию во время маневров с нулевым газом, обеспечивая управляемость при падении в инверте ("hang-time"). Он также делает повороты и виражи намного более четкими, так как активна полная стабилизация. Вы можете включить Airmode на постоянной основе через функцию PERMANENTLY_ENABLE_AIRMODE. ИЛИ только включив его вместе с режимом ACRO во вкладке modes.
Airmode будет держать I-составляющую (I-term) полностью активной при нулевом газе после того, как airmode_throttle_threshold ↩ будет превышен в первый раз, и до момента дизарминга (disarm). Это добавляет защиту на земле, когда газ ниже min_check, чтобы предотвратить нарастание ошибки I-term (windup) перед взлетом, что могло бы перевернуть мощные модели.
Motorstop_on_low ↩ обычно не рекомендуется для акробатических квадрокоптеров, когда активен Airmode. Однако она может иметь преимущества для больших мультикоптеров. А также для квадрокоптеров с очень высоким соотношением тяги к весу. В обоих этих случаях полезно включать Airmode ТОЛЬКО во вкладке modes вместе с режимом ACRO. И НЕ включать его постоянно для всех режимов. Причины следующие:- Большие коптеры лучше сажать в режиме ANGLE для дополнительной стабильности по уровню. Поэтому вам не нужно, чтобы Airmode был активен и поддерживал холостой ход моторов, что потенциально может привести к нестабильности (I-term windup) на земле. Как правило, безопаснее для мультикоптера иметь
motorstop_on_low, отключающий моторы, как только вы опускаете газ при касании земли. Однако это не сработает в режиме ANGLE, если активна функцияPERMANENTLY_ENABLE_AIRMODE, так какairmode_throttle_thresholdпереопределитmotorstop_on_lowво всех режимах полета в этом случае. - Вторая причина использовать вышеуказанный метод — для легких 6-баночных гоночных квадрокоптеров. Эти коптеры обычно создают такую тягу, что модель висит (ховерит) менее чем на 10% газа. Это может привести к I-term windup сразу после не идеально плавного касания. Часто заставляя коптер мгновенно перевернуться.
Дополнительные преимущества: Функциональность I-term в MC Airmode можно настроить в конфигураторе на вкладке Tuning, в разделе I-term Mechanics. С такими функциями, как I-term relax и Anti-gravity.
Самолет (Fixedwing):
Airmode работает немного иначе для самолетов. Он использует другие настройки для airmode_type — STICK_CENTER и STICK_CENTER_ONCE. Ссылка объясняет, как работает STICK_CENTER. В то время как STICK_CENTER_ONCE работает по тому же принципу, когда превышен airmode_throttle_threshold и стики управления отклонены от центра. Но он будет держать Airmode активным всегда до дизарминга. Это более выгодно для платформ типа мотопланеров, чтобы они сохраняли стабилизацию Airmode при нулевом газе. Обе настройки предотвращают нарастание I-term перед запуском, если вы не бросаете самолет сразу после арминга.
Airmode использует сервоприводы для стабилизации на самолете, вместо моторов, как на коптере. Он обеспечивает более высокую реакцию стабилизации в режиме ACRO. Даже обеспечивая более "залоченное" (locked-in) удержание положения, если I-gain увеличен по этой оси. Нет преимуществ при включении его с другими полетными режимами. См. также дополнительную информацию по этой теме, касающуюся самолетов.
ANGLE
В этом режиме автовыравнивания каналы крена и тангажа управляют углом между соответствующей осью и вертикалью, достигая горизонтального полета простым возвратом стиков в центр. Максимальный угол наклона ограничен параметрами max_angle_inclination_rll и max_angle_inclination_pit.
ANGLE HOLD (FW)
Этот режим работает как стабилизатор удержания пространственного положения (attitude hold). Но он не предназначен для 3D-пилотажа. Он ведет себя больше как режим Acro в том плане, что желаемое положение достигается отклонением стика, а затем вы отпускаете стик в центр. Но разница в том, что ANGLE HOLD попытается удержать или "зафиксировать" угол тангажа или крена, который был задан самолету, когда стик был отпущен в центр. Тем самым сопротивляясь любым долгосрочным изменениям положения полета, вызванным воздействием ветра. Возврат самолета в горизонтальный полет выполняется так же, как и при полете в режимах Acro или Manual.
Этот режим полета имеет ограничения по углам, заданные лимитами навигационных углов — nav_fw_climb_angle, nav_fw_dive_angle и nav_fw_bank_angle.
Он был разработан так, чтобы его можно было использовать с COURSE HOLD или ALT HOLD. Хотя оба эти режима нельзя выбрать для использования с ANGLE HOLD одновременно.
- ANGLE HOLD + COURSE HOLD — Будет поддерживать постоянный курс и угол набора высоты на большом расстоянии. Например, вверх или вниз вдоль длинного горного хребта.
- ANGLE HOLD + ALT HOLD — Позволит самолету совершать долгий разворот с креном без потери высоты в повороте.
ARM
Активирует многочисленные условия для полета. И позволяет мотору(ам) стать активными для движения. Некоторые из этих условий:
- Начинает запись логов полета. Включая Blackbox и статистику полета.
- Записывает местоположение и высоту для RTH.
- Может загрузить миссию по точкам (WP mission) из EEPROM в память полетного контроллера.
- Может включить автозапуск для самолета (FW auto launch).
- Запускает таймер полета.
При ДИЗАРМИНГЕ отключает некоторые из вышеперечисленных функций и сохраняет определенные изменения, сделанные в полете.
ALTHOLD
Будет поддерживать высоту аппарата в момент активации этого модификатора с ненавигационным режимом — ANGLE. Все навигационные режимы уже имеют ALTHOLD включенным по умолчанию. Для получения дополнительной информации см. здесь.
AUTO LEVEL TRIM (FW)
Режим настройки
AUTO LEVEL TRIM попытается автоматически настроить смещение тангажа (fw_level_pitch_trim), необходимое самолету, чтобы не терять высоту при полете по прямой в режиме самостабилизации. Чтобы использовать AUTO LEVEL, вы сначала должны находиться в режиме самостабилизации, который не использует ALTHOLD. ANGLE, HORIZON и COURSE HOLD подходят. Находясь в этом режиме, включите AUTO LEVEL и не вносите корректировок. AUTO LEVEL попытается настроить правильный Угол Атаки для вашей текущей скорости. Вы можете видеть, насколько ровно летит аппарат, с помощью цифрового вариометра на OSD. +/- 0.3° является приемлемым допуском. Как только полет выровняется, вы можете отключить AUTO LEVEL. Начиная с INAV 6.0, системное сообщение отображается при активности AUTO LEVEL. Скорость и точность триммирования также можно настроить через fw_level_pitch_gain. ↩
Новое значение не сохраняется в EEPROM автоматически, вы должны сохранить его вручную, используя конфигуратор или комбинацию стиков. Однако, если у вас включена функция, сохраняющая данные при дизарме, например Continuous Servo Trim или Stats, новое значение fw_level_pitch_trim будет сохранено.
До INAV 7.0 этот режим настройки назывался AUTO LEVEL.
AUTOTUNE (FW)
AUTOTUNE попытается настроить только FeedForward (упреждение) и Rates (расходы) по осям Roll и Pitch на самолете.
Autotune будет отслеживать поведение самолета и пытаться настроить усиления FeedForward для максимальной скорости вращения по каждой оси. Это обеспечит оптимальную стабилизацию и навигационную эффективность для вашего аппарата.
Как использовать:
Включите режим AUTOTUNE в любом ненавигационном режиме полета. ACRO — лучший вариант, и его следует предпочесть режимам Angle или Horizon.
ПРИМЕЧАНИЕ: Метод Advanced ROLL/PITCH ОБЯЗАТЕЛЬНО должен выполняться в режиме ACRO!
Чем больше маневров вы выполните стандартным методом, тем лучше результаты даст AUTOTUNE (до определенного момента). В то время как метод Advanced предоставит более устойчивый "снимок" максимальной скорости вращения осей вашего самолета. Это означает, что процесс настройки завершится быстрее и, как правило, обеспечит более точную настройку.
Убедитесь, что у вас достаточно высоты и пространства для выполнения задачи.
- Standard ROLL - Из горизонтального полета резко накрените влево, затем резко вправо настолько, насколько вы чувствуете уверенность, затем повторите несколько раз. Изначально вы можете заметить мягкую/медленную реакцию, если Rates и Feedforward были далеки от правильных значений.
- Standard PITCH - При полете по прямой быстро потяните стик ВВЕРХ на мгновение, чтобы самолет быстро набрал высоту под углом, с которым вам комфортно, а затем верните самолет в горизонтальный полет, чтобы восстановить скорость. Затем сделайте то же самое ВНИЗ, толкнув стик тангажа полностью на мгновение, чтобы самолет нырнул под углом, с которым вам комфортно, и затем верните самолет в горизонтальный полет; повторите процесс несколько раз. Изначально вы можете заметить мягкую/медленную реакцию, если Rates и Feedforward были далеки от правильных значений.
- Advanced ROLL - ЕСЛИ вы и ваш самолет способны выполнить полную бочку (360°) при полном отклонении стика, как влево, так и вправо. Это должно завершить процесс автонастройки всего за одну или две попытки.
- Advanced PITCH - ЕСЛИ вы и ваш самолет способны выполнить полную петлю (360°) вперед и/или обратную петлю (inverted loop). Не рекомендуется на больших самолетах или самолетах с низким соотношением тяги к весу. Увеличьте газ перед тем, как применить достаточное отклонение руля высоты ВВЕРХ для начала петли. Как только окажетесь в верхней точке петли, начните применять полное отклонение руля высоты. Затем, когда вы будете выходить из нижней части петли, начните немного отпускать руль высоты и газ. Для обратной петли: Наберите хорошую высоту и толкните руль высоты полностью ВНИЗ. Не забудьте начать применять полный газ в нижней части обратной петли, одновременно отпуская стик руля высоты ВНИЗ достаточно, чтобы предотвратить сваливание, когда самолет начинает вертикальный набор высоты (вторую половину петли). Это должно завершить процесс автонастройки всего за одну или две попытки.
AUTOTUNE будет регулировать усиления постоянно, но он будет делать "снимок" текущих усилений каждые 5 секунд. Когда вы отключаете его, будут восстановлены усиления AUTOTUNE из последнего снимка. Если вы включите и выключите AUTOTUNE до истечения 5 секунд, усиления FF и Rates не изменятся.
В настоящее время AUTOTUNE не сохраняет усиления в EEPROM — вы должны сохранить их вручную, используя комбинацию стиков.
Для детального описания перейдите на страницу Wiki INAV.
BEEPER
Заставляет пищать бузер, подключенный к полетному контроллеру (поиск потерянной модели).
BEEPER MUTE
Позволяет отключить пищалку полетного контроллера переключателем. Чтобы обеспечить тишину во время настройки.
BLACKBOX
Если вы ведете запись на встроенный чип флэш-памяти, вы, вероятно, захотите отключить запись Blackbox, когда она не требуется, чтобы сэкономить место. Для этого вы можете добавить режим полета Blackbox на один из ваших AUX каналов на вкладке modes в Конфигураторе. Как только вы добавите режим, Blackbox будет записывать данные полета только тогда, когда этот режим активен.
Заголовок лога всегда будет записываться во время арминга, даже если запись приостановлена. Вы можете свободно приостанавливать и возобновлять запись во время полета.
См. BLACKBOX для более подробной информации.
CAMERA CONTROL
Camera control 1, 2 & 3 используются для настройки параметров с вашего передатчика, когда используются камеры с записью Analog/HD, такие как Runcam Hybrid или Split. Доступные функции управления:
- WiFi - Подключение к приложению
- Power - Старт/Стоп записи
- Mode change - Изменение настроек изображения аналоговой и HD записи.
CAMSTAB
Позволяет использовать сервоприводы Tilt или Roll как активно стабилизированный подвес. Выделенная ось для каждого сервопривода выбирается во вкладке Mixer.
FAILSAFE
Позволяет активировать аварийный режим (failsafe) полетного контроллера с помощью AUX канала. Этот режим в первую очередь предназначен для ручной проверки того, сработает ли failsafe при необходимости. Читайте страницу Failsafe для получения дополнительной информации.
FLAPERON (FW)
Активация сдвигает оба элерона вниз (или вверх) на заданное смещение.
Настройка помимо активации режима FLAPERON довольно проста и состоит всего из одной переменной CLI: flaperon_throw_offset определяет диапазон отклонения в микросекундах (us) для обоих элеронов, который будет применен при активации режима FLAPERON. По умолчанию это 250 с максимумом 400.
Смещение флаперонов по умолчанию применяется как вход микшера сервоприводов с ID=14, поэтому, используя пользовательское микширование сервоприводов, вы можете настроить режим FLAPERON для отклонения любых нужных вам сервоприводов (включая выделенные закрылки).
FPV ANGLE MIX (MC)
Этот режим подмешивает тангаж (Pitch) к команде стика крена (ROLL). Или подмешивает тангаж к команде стика рыскания (YAW). Это нужно для преодоления эффекта смещения или дугообразного движения, видимого через FPV камеру, из-за угла наклона камеры вверх. Это обеспечивает более визуально привлекательный (соответствующий осям) опыт для фристайла или кинематографичных полетов. Просто установите fpv_mix_degrees = X°, где X — угол наклона вашей камеры вверх. Затем включите этот режим вместе с режимом ACRO.
HEADADJ (MC)
Позволяет установить новое начало отсчета рыскания для режима HEADFREE.
HEADFREE (MC)
В этом режиме "голова" (передняя часть) мультикоптера всегда указывает в том же направлении, что и в момент активации функции. Это означает, что когда мультикоптер вращается вокруг оси Z (рыскание), управление всегда будет реагировать в соответствии с тем же направлением "головы".
В этом режиме легче управлять мультикоптером, даже летать на нем физической передней частью к себе, так как управление всегда реагирует одинаково. Это дружественный режим для новых пользователей мультикоптеров и может предотвратить потерю управления, когда вы не знаете направление носа коптера.
HEADING HOLD
Этот режим полета влияет только на ось рыскания (yaw) и может быть включен вместе с любым другим режимом полета. Он помогает поддерживать текущий курс без вмешательства пилота и может использоваться как с поддержкой магнетометра, так и без нее. Когда стик рыскания находится в нейтральном положении, режим Heading Hold пытается сохранить курс (азимут, если доступен компас) в определенном направлении. Когда пилот перемещает стик рыскания, Heading Hold временно отключается и ждет новой уставки.
Heading hold использует только управление рысканием (руль направления), поэтому он не будет работать на летающем крыле, у которого нет руля направления, если только не активна стабилизация рыскания с помощью двух моторов.
HOME RESET
Этот режим предоставляет способ сбросить домашнюю локацию или координаты арминга, к которым модель вернется. Это полезно, если вы решили запустить модель или взлететь до того, как модель поймает фикс GPS. Используя этот режим, вы можете пролететь мимо места запуска позже в полете, когда фикс GPS будет установлен. И на мгновение активировать функцию. В идеале лучше назначить этот режим на "крутилку" (потенциометр) или многопозиционную кнопку, чтобы он не активировался непреднамеренно.
HORIZON
Этот гибридный режим работает точно так же, как предыдущий режим ANGLE, когда стики крена и тангажа находятся в центре (обеспечивая автовыравнивание), но постепенно ведет себя все больше как режим RATE (ACRO) по мере отклонения стиков от центрального положения. Это означает, что он не имеет ограничений по углу наклона и позволяет делать флипы.
Самая большая жалоба на режим Horizon — резкость перехода от Angle к Rate при стандартных настройках. Это может застать врасплох новичков. Но переход можно сделать более плавным, изменив настройки — max_angle_inclination_rll = 900, max_angle_inclination_pit = 900, fw_d_level = 95 ИЛИ mc_d_level = 95. Это обеспечит более линейное ощущение стика, эквивалентное Acro. И позволит переходу происходить только вблизи максимального отклонения стика или около 85° угла крена/тангажа, когда вы уверены, что хотите выполнить ролл или флип. Это применимо как к MC, так и к FW платформам.
KILLSWITCH
Позволяет мгновенно задизармить (отключить) полетный контроллер и заблокировать его, независимо от других настроек, сохранений или проверок. Аналогично тумблеру disarm.
LEDLOW
Выключает RGB светодиоды.
LOITER CHANGE (FW)
Меняет направление установленного кружения (loiter) на обратное при выборе режима.
MANUAL (FW)
Прямое управление сервоприводами на самолете. Этот режим назывался PASSTHROUGH до версии 1.8.1.
В этом режиме нет стабилизации. Обратите внимание, что режим MANUAL также переопределяет навигационные режимы, кроме RTH. Чтобы переключиться в навигационный режим, такой как POSHOLD, из режима MANUAL, режим MANUAL нужно сначала выключить.
Что делает полетный контроллер в режиме MANUAL: микширование моторов, микширование сервоприводов, настройки экспоненты (Expo), ограничение расходов (см. настройки manual_*_rate). Обратите внимание, что Failsafe все еще активен в этом режиме и может перехватить управление.
MC BRAKING (MC)
Используется с режимом POSHOLD, этот режим обеспечивает более быстрое ручное торможение при отпускании стика тангажа. Чтобы этот режим работал, необходимо включить nav_user_control_mode = CRUISE. (подробнее)
Использовать с осторожностью. Этот режим может вызвать временную потерю управления (runaway) при некоторых настройках и в некоторых условиях. Подробнее см. по ссылке.
MIXER PROFILE 2
Этот режим в основном используется для активации Профиля Микшера 2, который содержит настройки управления и PID для мультироторного режима моделей VTOL.
MIXER TRANSITION
Используется для перевода самолетов VTOL из профиля управления мультиротором в профиль управления самолетом и обратно. Это полезно для того, чтобы позволить VTOL набрать скорость перед переходом в полный самолетный полет. Чтобы не свалиться и не потерять высоту в процессе перехода. Или его также можно использовать для замедления самолета в самолетном режиме для торможения и лучшей устойчивости управления перед переходом в состояние мультиротора (VTOL).
MSP RC OVERRIDE
Позволяет переопределять определенные RC каналы сообщениями MSP MSP_SET_RAW_RC. Каналы для переопределения определяются настройкой CLI msp_override_channels. Существует пример кода, который предоставляет дополнительную информацию и пример приложения, иллюстрирующий использование MSP RC OVERRIDE.
MULTI FUNCTION
Эта функция использует один режим для переключения между различными функциями на основе обратной связи, предоставляемой полем Multi Function OSD. Функции выбираются путем кратковременного переключения режима ВКЛ/ВЫКЛ (ON/OFF) в такой последовательности, повторяя, пока требуемая функция не отобразится в OSD. Затем функция активируется включением режима более чем на 3 секунды. Отключение режима более чем на 3 секунды сбрасывает все, оставляя поле OSD пустым. В идеале для управления режимом следует использовать кнопку без фиксации, хотя он должен работать и с обычным переключателем. Текущие функции включают:
- Повторное отображение любых предупреждений
- Активация аварийной посадки
- Приостановка Safehome
- Приостановка Trackback
- Активация режима Turtle (переворот)
- Функция аварийного арминга
Также предоставляет предупреждения, которые отображаются в течение 10 секунд при первом срабатывании, после чего предупреждение исчезает и заменяется символом тревоги с числом, показывающим общее количество активных предупреждений. Активные предупреждения затем повторно отображаются в течение 5 секунд в циклическом режиме каждые 30 секунд. Поле пустое, если предупреждений нет. Текущие предупреждения предоставляются для:
- Состояния батареи
- Уровня вибрации
- Фиксации или сбоя GPS
- Проверки адекватности RTH (>200м курс в неправильном направлении)
- Проверки адекватности высоты (разница между расчетной и GPS высотой > 20м)
- Сбоя компаса
- Режима наземного тестирования
NAV LAUNCH FW
См. документацию по навигационным режимам.
OSD ALT
Переключает на различные альтернативные экраны OSD: ALT1, ALT2 или ALT3. Макет OSD по умолчанию отображается, когда ни один из них не выбран. Если пользователь выбрал osd_failsafe_switch_layout = ON, OSD переключится на макет по умолчанию при возникновении Failsafe. По этой причине полезно иметь координаты дома на макете OSD по умолчанию.
OSD SW
Выключает OSD.
PREARM
Когда PREARM назначен на диапазон, INAV предотвращает Арминг до тех пор, пока условие PREARM не будет выполнено, и выдаст ошибку преарминга при попытке Арминга. После того, как аппарат заармлен, INAV прекращает мониторинг условия PREARM.
SERVO AUTOTRIM (FW)
Режим настройки
Настройка средней точки сервопривода в полете для прямолинейного полета. Это было изменено в версии 3.0. Триммируются только сервоприводы с правилом "stabilized" (стабилизированный) в микшере сервоприводов. Также обратите внимание, что автоматическая версия этой функции, введенная в 3.0, требует GPS и обнаруживаемого движения для работы.
Цель этого режима — установить новые средние точки для сервоприводов 2-5. Убедитесь, что вы назначили эти номера сервоприводов на свои управляющие поверхности, иначе они не будут оттриммированы. Если у вас есть другой сервопривод (например, серво-подвес), назначенный на сервоприводы 2-5, то этот сервопривод будет оттриммирован. Это делается для того, чтобы при переключении в режим manual самолет летел прямо, а также чтобы помочь PIFF-контроллеру знать, где самолет должен лететь прямо.
Как использовать:
- Предназначено для использования в воздухе.
- Летите прямо, выберите режим, который вам больше всего подходит (
manual,angleилиacro). - Включите режим
SERVO AUTOTRIMи продолжайте лететь прямо в течение 2 секунд. Через 2 секунды он установит новые средние точки на основе среднего положения сервопривода за эти 2 секунды. - Если вы НЕ довольны новыми средними точками, отключите режим
SERVO AUTOTRIM, и он вернется к старым настройкам. Если вы хотите сохранить новые средние точки, оставьтеSERVO AUTOTRIMвключенным, посадите самолет и сделайте disarm. Новые средние точки будут сохранены.
Вы можете захотеть проверить свои новые средние точки после посадки, если смещение сервопривода велико, вы можете изменить тяги механически и повторить настройку средней точки.
Это не следует путать с настройкой самолета для горизонтального полета в ANGLE и других режимах с контролем положения. Для этого используйте AUTO LEVEL TRIM.
SOARING (FW)
Режим самолета для парящего полета с выключенным мотором, предназначен для планеров или мотопланеров. Режим становится активным только тогда, когда также выбраны режимы Position Hold или Cruise/Course Hold, обеспечивая полуавтономное парение при кружении или полете по прямой с удержанием курса.
Когда режим активен, контроль высоты отключается, и режим Angle может свободно плавать (отключен) в диапазоне тангажа, установленном nav_fw_soaring_pitch_deadband (плавающий угол тангажа по обе стороны от горизонта). Мотор может быть остановлен установкой nav_fw_soaring_motor_stop.
SURFACE
Включает следование рельефу местности (режим поверхности AGL), если у вас включен дальномер (rangefinder). Это будет использовать LIDAR или SONAR для следования форме земли, как показано оранжевой линией на изображении.
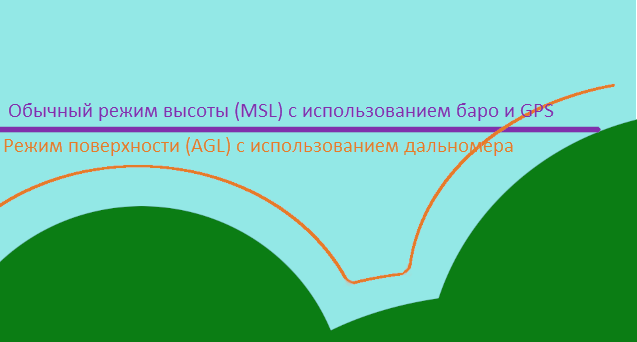
Пилоты иногда спрашивают об объединении показаний дальномера с барометром. Изображение должно показать, почему эти два разных измерения несовместимы — самолет не может лететь одновременно по оранжевой и фиолетовой линиям.
Установите inav_max_surface_altitude и nav_max_terrain_follow_alt на максимальное расстояние (в сантиметрах), на котором ваш дальномер надежно точен.
TELEMETRY
Позволяет включать и выключать передачу телеметрии.
TURN ASSIST
Обычно стик YAW (рыскание) выполняет поворот вокруг вертикальной оси аппарата — вот почему, когда вы летите вперед в режиме RATE и делаете разворот на 180 градусов, используя только YAW, вы в конечном итоге будете смотреть вверх и лететь назад. В режиме ANGLE это также вызывает эффект, известный как "пируэт", когда поворот не плавный, и линия горизонта не поддерживается.
В режиме RATE пилот компенсирует этот эффект, используя стики ROLL и YAW одновременно для координации вращения и сохранения положения (линии горизонта).
Режим TURN ASSISTANT рассчитывает эту дополнительную команду ROLL, необходимую для поддержания скоординированного разворота по YAW, эффективно заставляя стик YAW поворачивать самолет вокруг вертикальной оси относительно земли.
В режиме RATE это позволяет совершать идеальный поворот только стиком рыскания без изменения положения машины. Может быть небольшой дрейф из-за не мгновенной реакции PID-контроля, но пилотировать новичкам в режиме RATE все равно намного проще.
В режиме ANGLE это также делает повороты по рысканию более плавными и полностью без пируэтов. Это связано с тем, что TURN ASSIST вводит feed-forward контроль по тангажу/крену и поддерживает положение естественно и без задержки.
С INAV 1.7 turn assist будет работать на самолетах. При выполнении поворота на самолете он рассчитает необходимую скорость рыскания и тангажа, чтобы держать самолет направленным на горизонт. TAS (от датчика воздушной скорости) будет использоваться для расчета, если доступен — иначе код будет использовать крейсерскую скорость, определенную fw_reference_airspeed.
TURTLE (MC)
Предоставляет способ перевернуть мультикоптер, который упал вверх ногами, используя стики крена или тангажа.
USER
Отображаются на полетных контроллерах как USER1 & USER2 & USER3 & USER4, также известные как PinIO. Настройки USER обычно используются для определенных функций заданных изначально производителем полетного контроллера.
Например:
- Некоторые производители FC назначают
USER 1как выключатель питания VTX. Который включает электронное оборудование для включения и выключения вашего HD или аналогового VTX. - Они также могут добавить оборудование полетного контроллера для переключения двух аналоговых камер на
USER 2. - Часто
USER 3выбирается для включения или выключения питания отдельной HD камеры. - А
USER 4— для удаленного Старта/Стопа записи отдельной HD камеры.
Примечание: Это не следует воспринимать как установленный порядок. Всегда читайте описание оборудования в руководстве производителя FC.
WP Planner
Это навигационный режим, который позволяет вам прокладывать маршрут по путевым точкам прямо во время полета. См. более подробную информацию.
AUXILIARY CONFIGURATION (Настройка AUX каналов)
Свободные вспомогательные каналы приемника можно использовать для включения/выключения режимов. Некоторые режимы можно включить только таким способом.
Настройте ваш передатчик так, чтобы переключатели или крутилки (потенциометры) отправляли данные каналов по каналам 5 и выше (первые 4 канала обычно заняты газом, элеронами, рулем направления и рулем высоты).
Например, вы можете настроить 3-позиционный переключатель на отправку 1000, когда переключатель внизу, 1500, когда переключатель посередине, и 2000, когда переключатель вверху.
Настройте лимиты каналов TX/RX для использования значений между 1000 и 2000. Диапазон, используемый диапазонами режимов, фиксирован: от 900 до 2100. Когда канал находится в пределах указанного диапазона, соответствующий режим включается.
Используйте инструмент конфигурации GUI (вкладка Modes) для легкой настройки.
CLI
Существует команда CLI aux, которая позволяет настраивать вспомогательные каналы. Она принимает 5 аргументов следующим образом:
aux <индекс слота диапазона> <ID режима> <индекс AUX канала> <нижнее положение> <верхнее положение>
- индекс слота диапазона (0 - 39)
- ID режима (см. список режимов ниже)
- индекс AUX канала (AUX1 = 0, AUX2 = 1,... и т.д.)
- нижнее положение, от 900 до 2100. Должно быть кратно 25.
- верхнее положение, от 900 до 2100. Должно быть кратно 25.
Если нижнее и верхнее положение одинаковы, значения игнорируются.
Например: Настроить слот диапазона AUX 0 для включения ARM, когда AUX1 находится в пределах от 1700 до 2100.
aux 0 0 0 1700 2100
Вы можете отобразить конфигурацию AUX, используя команду aux без аргументов.
Mode ID List (Список ID режимов)
"ARM" 0 "ANGLE" 1 "HORIZON" 2 "NAV ALTHOLD" 3 "HEADING HOLD" 5 "HEADFREE" 6 "HEADADJ" 7 "CAMSTAB" 8 "NAV RTH" 10 "NAV POSHOLD" 11 "MANUAL" 12 "BEEPER" 13 "LEDS OFF" 15 "LIGHTS" 16 "OSD OFF" 19 "TELEMETRY" 20 "AUTO TUNE" 21 "BLACKBOX" 26 "FAILSAFE" 27 "NAV WP" 28 "AIR MODE" 29 "HOME RESET" 30 "GCS NAV" 31 "FPV ANGLE MIX" 32 "SURFACE" 33 "FLAPERON" 34 "TURN ASSIST" 35 "NAV LAUNCH" 36 "SERVO AUTOTRIM" 37 "KILLSWITCH" 38 "CAMERA CONTROL 1" 39 "CAMERA CONTROL 2" 40 "CAMERA CONTROL 3" 41 "OSD ALT 1" 42 "OSD ALT 2" 43 "OSD ALT 3" 44 "NAV COURSE HOLD" 45 "MC BRAKING" 46 "USER1" 47 "USER2" 48 "LOITER CHANGE" 49 "MSP RC OVERRIDE" 50 "PREARM" 51 "TURTLE" 52 "NAV CRUISE" 53 "AUTO LEVEL" 54 "WP PLANNER" 55 "SOARING" 56
Advanced Topics
Вы можете найти объяснения команд стиков и других функций в документации для разработчиков Controls Dev Doc.
ID 3261