
iNav для самолетов с неподвижным крылом
Основы настройки INAV для самолета
Полетные контроллеры, разработанные для самолетов с неподвижным крылом
Любой полетный контроллер можно использовать для сборки самолетов с неподвижным крылом, однако контроллеры, специально разработанные для этой цели, сделают сборку проще и потребуют меньше дополнительных компонентов. Например, использование полетного контроллера, разработанного для мультироторов, в сборке самолета обычно требует дополнительного стабилизатора 5V или BEC для питания сервоприводов, в то время как контроллеры, разработанные для самолетов, обеспечат независимую линию 5V для питания сервоприводов.
Некоторые из самых популярных полетных контроллеров для самолетов с неподвижным крылом:
- Matek F405-WING (целевой F405SE)
- Matek F722-WING
- Matek F411-WING
- FuriousFPV F-35
Рекомендуемые GPS-модули
- Beitian BN220
- Beitian BN180
- Matek M8Q
Шаг 1: Подготовка полетного контроллера
- Прошейте последнюю версию INAV с помощью INAV Configurator
- Проведите полную калибровку датчиков. Уровень должен соответствовать углу самолета при полете по прямой. Не пропускайте этот шаг.
- Выберите пресет из вкладки INAV presets, который лучше всего подходит для вашего воздушного судна, затем нажмите "Save & Reboot"
Шаг 2: Подключение всего оборудования
На изображении ниже показана стандартная схема подключения как для летающего крыла, так и для обычной модели самолета с элеронами, рулем высоты и рулем направления. Вы подключаете каждый сервопривод к соответствующему PWM-выходу на вашем полетном контроллере.
Примечание: Если вы используете INAV с Mini Talon, или у вас в наличии Skyhunter (Nano, Micro, Mini и полноразмерный) вам понадобится Custom Mix, чтобы сервоприводы двигались правильно. Посмотрите здесь.
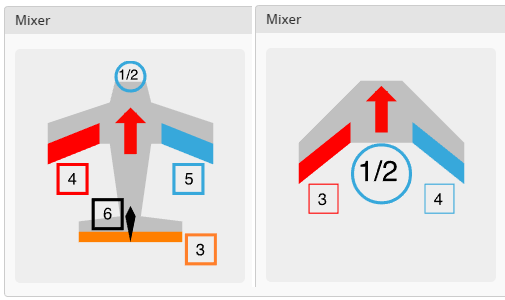
Сервоприводы и ESC/МОТОР. (Имейте в виду, что положительный провод сервоприводов должен подключаться к независимому BEC (не подключайте к полетному контроллеру.)
Самолет (Airplane)
- Выход 1 - Мотор/ESC
- Выход 2 - Свободно/Или 2-й мотор
- Выход 3 - Руль высоты (Elevator)
- Выход 4 - Элерон (Aileron)
- Выход 5 - Элерон (Aileron)
- Выход 6 - Руль направления (Rudder)
Летающее крыло
- Выход 1 - Мотор/ESC
- Выход 2 - Свободно/Или 2-й мотор
- Выход 3 - Левый элевон (Port Elevon)
- Выход 4 - Правый элевон (Starboard Elevon)
Пример использования SpracingF3:
- Выход 1 - Если используется GPS, подключите его к UART 2.
- Выход 2 - Если используется GPS, настройте UART2 для GPS на скорости 57600 бод и включите GPS в конфигурациях (если это не работает, попробуйте 115200).
- Выход 3 - Если используется Sbus, подключите его к UART 3/или к UART, выделенному для sbus на вашей плате.
- Выход 4 - Если используется обычный PPM, подключите его к IO 1 pin 1.
- Выход 5 - Если используется телеметрия, подключите ее с помощью softserial. (Если используется Smartport, прочитайте это)
Шаг 3: Настройка приемника
Перейдите на вкладку Configuration и выберите "Receiver Mode" для вашего приемника.
Если вы используете приемник на основе последовательного протокола (например, SBUS), перейдите на вкладку ports и включите "Serial RX" для порта, к которому вы его подключили. Другие типы приемников, такие как MSP, требуют другой настройки портов.
Шаг 4: Настройка пульта управления, конечных точек и реверса сервоприводов
Ваш передатчик должен работать БЕЗ смешивания каналов / NO mixing at all (т.е. отдельные каналы для Thr, Ail, Rud, Ele).
Проверьте, что при движении стиков каналы в окне приемника двигаются адекватно. Все каналы должны быть отцентрированы на 1500мкс, а полное движение стика должно быть 1000-2000мкс. Используйте субтриммер и диапазон хода на вашем TX для настройки этого.
Правильный способ:
- Стик газа вперед - значение канала увеличивается
- Стик рыскания (руля направления) вправо - значение канала увеличивается
- Стик тангажа (руля высоты) вперед - значение канала увеличивается
- Стик крена (элеронов) вправо - значение канала увеличивается
Далее проверьте, что ваши сервоприводы двигаются как ожидается:
- Сервопривод двигается в правильном направлении при движении стиков. Видео-помощь на YouTube
- Движение сервопривода не превышает желаемого максимального отклонения управляющих поверхностей.
- Средняя точка сервопривода имеет управляющие поверхности идеально по центру.
Примечание: Проверку производите в режиме Manual (ранее passthrough mode). В других режимах вы не увидите полного отклонения (при калибровке на рабочем столе). Если вы не знаете, как настроить режим Manual, смотри тоже видео (автоматический переводчик в помощь).
На вкладке "Output":
- Если сервоприводы двигаются в обратном направлении, включите переключатель "Reverse".
- Если отклонение превышает максимальное желаемое значение, уменьшите значения min/max.
- Если управляющие поверхности крыла не идеально отцентрированы, отрегулируйте среднюю точку сервопривода.
Примечание: Вы можете изменить привязку сервоприводов во вкладке mixer.
На этом этапе все должно работать как ожидается.
- При движении стиков на TX управляющие поверхности должны двигаться правильно, проведите тест "High Five"
- При движении самолета в воздухе в режиме angle, управляющие поверхности должны двигаться в соответствии с движением самолета, чтобы противодействовать воздушным потокам и стабилизировать самолет. Возможно, вам придется временно утроить значение P-коэффициента на осях Roll, Pitch и Yaw во вкладке "PID tuning". (Чтобы было легко увидеть движение.)
Шаг 5: Замена значений по умолчанию
Чтобы установить максимальный угол крена и тангажа в режиме ANGLE на 60° введите и сохраните в CLI следующее:
set max_angle_inclination_rll= 600
set max_angle_inclination_pit= 600
Увеличьте small_angle (чтобы INAV позволял вам армиться в любом положении), напечатайте и сохраните в CLI:
set small_angle= 180
Если вы хотите, чтобы ваша модель самолета "кружилась" над местом посадки вместо попытки посадки после выбора режима RTH и возвращения домой, вы можете установить режим кружения, набрав это и сохранив в CLI:
set nav_rth_allow_landing= NEVER
В INAV, когда включен режим RTH, модель сначала наберет высоту, а затем вернется домой. Если вы установите значение ниже, модель сначала повернет, а затем будет набирать высоту по пути обратно к домашней позиции:
set nav_rth_climb_first= OFF
(Обычно значение по умолчанию более полезно)
В INAV высота RTH по умолчанию составляет 10 метров, что может быть слишком низко для мест полетов с деревьями. Вы можете изменить это на 70 метров, установив это значение во вкладке CLI и набрав save :
set nav_rth_altitude= 7000
Чтобы модель не переходила в режим failsafe при использовании нулевого газа более 10 секунд наберите следующее:
set failsafe_throttle_low_delay= 0
(Это остановит защиту от failsafe при низком газе только по времени. При этом потеря RC связи все равно может привести к DISARM при низком газе. Следите за последними обновлениями функций FailSafe в INAV.
Настройте режим failsafe.
Если вы выберете во вкладке Modes, чтобы ваш самолет переходил в режим RTH по тумблеру, то если стик газа установлен в ноль, управление газом атоматически производиться не будет, .
Настройте правильное действие при failsafe. Для большинства пользователей рекомендуется использовать:
set failsafe_procedure= RTH
Уделите несколько минут, чтобы прочитать, как разные Режимы полета влияют на модель в воздухе.
Настройте режим manual, чтобы если что-то случится с гироскопом/акселерометром в воздухе, вы могли использовать ручное управление. Это включает случаи, когда ваш полетный контроллер перезагружается во время полета из-за, например, просадки напряжения.
Прочитайте команды INAV CLI, особенно ВСЕ помеченные "fw_". Это даст вам подсказки, как работают режимы для самолетов с неподвижным крылом.
Шаг 6: Необязательно, но рекомендуется:
- Настройте ваш PIFF контроллер (версии INAV 1.6 и новее)
- Чтобы сделать удержание высоты более плавным, вы можете настроить следующие параметры:
set nav_fw_pos_z_p
Хорошие стартовые значения:
set nav_fw_pos_z_i
set nav_fw_pos_z_d30/10/10. - Используйте режим Airmode для полной стабилизации даже при отсутствии газа.
- Настройте failsafe с возвратом домой (RTH).
- Если ваш компас не настроен правильно, просто отключите его. Откалиброванный компас может вызывать дрейф ориентации во время полета, который может не проявляться в конфигураторе (особенно встроенные компасы на вашем FC). Серьезно подумайте об отключении, если он вам не нужен. INAV обычно использует направление по GPS. На земле до достижения нормальной фиксации спутников GPS, а так же, если ошибка между направлением GPS и компаса превышает 60 градусов, в приоритете будет использоваться направление компаса.
- Используйте функцию MOTOR_STOP для большей безопасности. Двигатели не будут вращаться сразу после запуска.
- Используйте:
set tpa_rate
Это параметры оптимизации вашего PIFF для более высоких скоростей. Хорошее стартовое значение
set tpa_breakpoint- 40%на крейсерской позиции газа как точка перегиба. - Скорость сервоприводов ограничивает частоту управления вашего FC. Вы можете понизить:
set gyro_hardware_lpf
до20 - Настройте:
set roll_rate
под летные характеристики вашего самолета. Например, для гоночного крыла хорошие стартовые значения:
set pitch_rateset roll_rate = 36
set pitch_rate = 18 - Настройте режим RTH по желанию
- Увеличьте:
set nav_fw_bank_angle
для более крутых поворотов. - Установите:
set inav_reset_home= FIRST_ARM
Если вы не хотите, чтобы ваша домашняя позиция сбрасывалась во время переарма в воздухе.
Последний шаг: тестовый полет!
Дважды проверьте следующее:
- 3D-модель в конфигураторе двигается правильно при ручном перемещении самолета. Убедитесь, что модель показывает уровень горизонта, когда вы держите самолёт горизонтально в воздухе.
- Проведите тест "High Five" в режиме manual, убедитесь, что все движется как ожидается.
- Включите режим Angle / Horizon и убедитесь, что управляющие поверхности двигаются правильно при ручном перемещении самолета и при движении стиков на TX
- Произведите Арм и запуск вашего самолета с использованием предпочтительного режима, например manual для первого полета.
- Если самолет не летит ровно в режиме самостабилизации, таком как Horizon, вам нужно откорректировать положение платы контроллера.
- Если самолет летит выровненно, выполните автоматическую подстройку сервоприводов (Servo Autotrim)
- Настройте ваши PIFF значения, либо вручную, либо с помощью AUTOTUNE
Для GPS-функций
- Протестируйте NAV ALTHOLD и убедитесь, что он удерживает высоту.
- Протестируйте NAV ALTHOLD и NAV POSHOLD в комбинации
- Протестируйте режим RTH
- Протестируйте failsafe
ID 47