
INAV для пользователей BetaFlight
Вы уже знаете, как настроить и летать на мультироторе с BetaFlight, и теперь хотите попробовать INAV?
Отлично! Вы на правильном пути.
INAV и BetaFlight были ответвлениями от проекта CleanFlight. Но в настоящее время они сильно отличаются друг от друга.
В то время как BetaFlight развивался для обеспечения хорошей летной производительности мультироторов в режиме ACRO, INAV развивался для обеспечения надежности полета, возможностей навигации и разнообразия конфигураций транспортных средств.
INAV работает на квадрокоптерах, как и BetaFlight, но также работает на [би|три|гекса|окта]коптерах, самолетах с неподвижным крылом, таких как самолеты, планеры и летающие крылья, роверах ( автомобили и танки), а также на лодках.
Несмотря на эти большие различия, INAV и BetaFlight по-прежнему имеют много общих функций, и совершенно нормально видеть, как некоторый код переносится из одного программного обеспечения для полетных контроллеров в другое и обратно.
Если вы уже знаете, как настроить мультироторный аппарат с BetaFlight, вы уже знаете большую часть того, что вам нужно для настройки мультиротора с INAV. Конфигуратор INAV и конфигуратор BetaFlight очень похожи. Вероятно, у вас не возникнет проблем с пониманием. Чтобы прошить INAV на вашу плату полетного контроллера, процесс такой же: перейдите на вкладку Firmware Flasher в конфигураторе INAV и выберите правильный TARGET.
Давайте рассмотрим основные различия:
- Не все платы полетных контроллеров имеют правильный таргет для INAV. Но самые распространенные из них имеют.
- После прошивки, при первом подключении вашей платы FC к конфигуратору INAV, он попросит вас загрузить пресет. Сделайте это, так как это облегчит вам работу в будущем.
- Калибровка акселерометра и гироскопа является обязательной в INAV и представляет собой 6-шаговый процесс (в отличие от BetaFlight, где это необязательный одношаговый процесс). Следуйте инструкциям на экране, и все будет в порядке.
- Для полностью автономного мультиротора (с возможностями автоматической навигации, такими как RTH, Poshold и WP-миссии) плата полетного контроллера должна иметь встроенный барометрический датчик. Без него точность навигации по высоте для мультикоптеров в INAV пострадает.
- Кроме того, вам нужно закрыть датчик барометра небольшим кусочком поролона с открытыми ячейками, потому что ветер влияет на показания датчика. Это самая распространенная причина проблем с удержанием высоты.
- До версии 7.1. Модуль GNSS должен быть оснащен датчиком магнитометра для наилучшей точности навигации. GNSS-модули без датчика магнитометра будут работать с версии 7.1 и далее для навигации коптеров. См. требования
- Модуль GPS следует устанавливать на небольшой мачтовый шест, чтобы избежать магнитных помех от двигателей на компас; 5 или 6 сантиметров над двигателями будет достаточно.
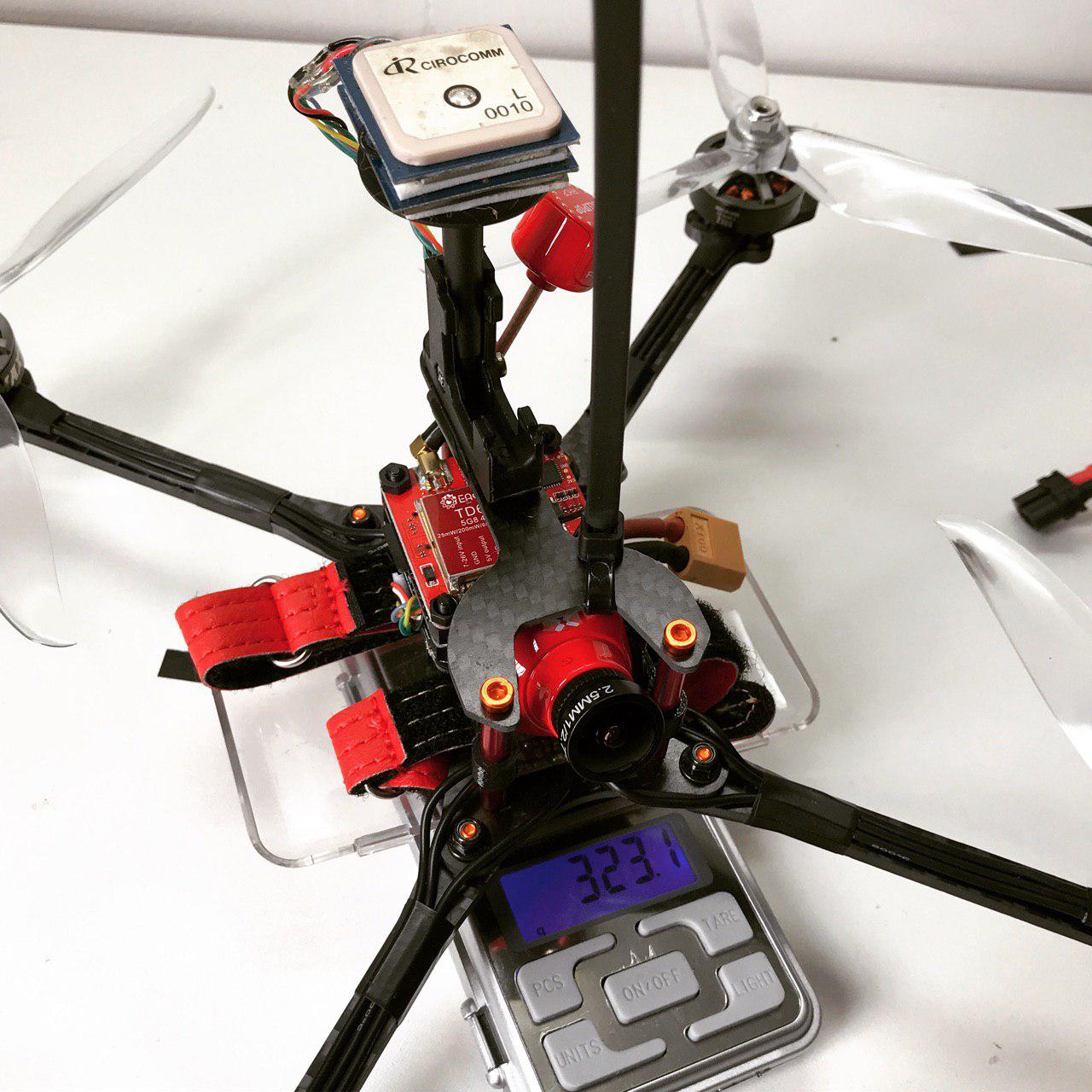
FPV-квадрокоптер с GPS-мачтой
- В INAV НЕТ полной функции отображения ресурсов. Но он поддерживает отображение таймеров вывода для двигателей и сервоприводов.
- INAV поддерживает протокол DShot для ESC, но не на том же уровне, что и BetaFlight. DShot 150, 300 или 600 более чем достаточно для надежного полета. Более быстрые протоколы снизят надежность на больших коптерах из-за помех в сигнале ESC на длинных проводах.
- INAV поддерживает частоты петли до 4 кГц без устройств i2C. Однако для надежной работы навигации частота должна быть ограничена 2 кГц при использовании устройств i2C.
- Поддерживаются DShot-телеметрия и бипер, но не двунаправленная связь. Только однопроводная телеметрия.
Самые важные настройки, на которые следует обратить внимание перед первым полетом
set nav_mc_hover_thr |
Это базовое значение газа, которое ваш коптер будет использовать для удержания высоты при зависании. Должно быть установлено для работы в режиме Poshold. |
set max_angle_inclination_rll = 600 |
Максимальный угол крена, разрешенный в режиме ANGLE, в десятых долях градуса (для крена) |
set max_angle_inclination_pit = 450 |
Максимальный угол тангажа, разрешенный в режиме ANGLE, в десятых долях градуса (для тангажа) |
set nav_mc_bank_angle = 27 |
Максимальный угол крена, который аппарат будет выполнять в автоматических или позиционных режимах управления, в градусах. (ограничивается max_angle_inclination_rll и max_angle_inclination_pit) |
set throttle_idle = 5 |
Установить минимальную скорость двигателей (в процентах). Значение по умолчанию 15, что может быть высоким для современных ESC. |
set small_angle = 180 |
Позволяет армировать аппарат под любым углом |
set gps_ublox_use_galileo = ON |
Позволяет GNSS-модулю использовать спутники Galileo, если это поддерживается (проверьте доступность локального созвездия) |
set nav_extra_arming_safety = ALLOW_BYPASS |
Позволяет армировать аппарат без 3D-фиксации GPS (Внимание: позиция RTH не будет записана) |
set nav_wp_radius = 500 |
Радиус в сантиметрах для считывания достижения путевой точки. |
set nav_wp_safe_distance = 400 |
Если первая путевая точка загруженной миссии находится дальше этого значения (в метрах). |
set nav_auto_speed = 2000 |
Максимальная скорость коптера по земле в автоматических режимах (в сантиметрах в секунду) |
set nav_auto_climb_rate = 600 |
Вертикальная скорость аппарата в автоматических режимах (сантиметров в секунду) |
set nav_rth_allow_landing = ALWAYS |
Разрешить коптеру приземляться самостоятельно после RTH или FS. |
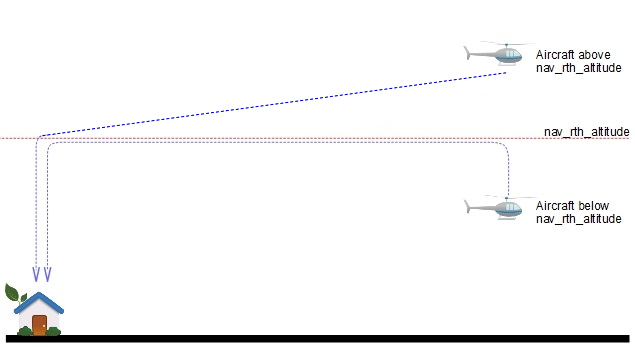
set nav_rth_altitude = 5000 |
Высота, которую аппарат попытается достичь при выполнении RTH (в сантиметрах) |
set nav_rth_alt_mode = AT_LEAST |
Позволяет аппарату возвращаться домой, снижаясь до высоты RTH. Это экономит энергию, обменивая высоту на скорость. |
ID 48