

 в Betaflight")
PINIO и PINIO Box (ПИНИО и Бокс ПИНИО) в Betaflight
Среда, 24 июня 2026
Технику БПЛА
Техническое руководство: Управление периферийными устройствами БПЛА через PINIO в Betaflight
Коротко о сути:
PINIO в Betaflight — это способ превратить свободный GPIO‑вывод микроконтроллера полётного контроллера (FC) в управляемый цифровой сигнал, который можно включать/выключать через логические режимы (boxes/modes) и переключатели AUX на аппаратуре. Такой сигнал часто используется как “разрешение/триггер” для внешних модулей: питание (через ключ), запись камеры, включение/отключение Bluetooth‑UART адаптера, перевод VTX в определённое состояние и т. п.
Важно (электрическая часть):
PINIO обычно формирует логические уровни порядка 0V / 3.3V (LOW/HIGH) относительно GND (земли). Это сигнальный вывод микроконтроллера (MCU), а не “силовой” выход питания. Если вы хотите именно включать/выключать питание камеры/VTX/другой нагрузки, почти всегда требуется электронный ключ (MOSFET/транзистор/готовый power‑switch модуль), потому что GPIO‑пин не рассчитан на ток нагрузки.
0. Термины и обозначения (без этого PINIO обычно путают)
- БПЛА — беспилотный летательный аппарат (квадрокоптер/дрон).
- FC (Flight Controller, полётный контроллер) — плата управления дроном с микроконтроллером, датчиками и контактными площадками (падами) для подключения.
- Betaflight — прошивка (firmware) полётного контроллера.
- Betaflight Configurator — конфигуратор (ПК‑программа/приложение), через который настраивают Betaflight.
- CLI (Command Line Interface) — командная строка Betaflight, где выполняются команды вида
resource,get,set,save. - MCU (Microcontroller Unit) — микроконтроллер на FC (часто семейство STM32).
- GPIO — универсальный цифровой вход/выход MCU (General Purpose Input/Output).
- Пин (pin) — вывод микроконтроллера (например,
B10,A00и т. п.), способный работать как цифровой I/O. - Пад (pad) — контактная площадка на плате FC, к которой вы припаиваете провод. Обычно пад связан с конкретным MCU‑пином.
- UART — аппаратный последовательный интерфейс. Имеет линии TX (передача) и RX (приём).
- serial_tx / serial_rx — ресурсы Betaflight, отвечающие за назначение TX/RX конкретного UART на пины MCU.
- AUX — дополнительные каналы управления от приёмника (Receiver), которые обычно сидят на тумблерах/переключателях аппаратуры (пульта).
- Modes (вкладка “Modes”) — раздел в Configurator, где режимам (ARM, BEEPER, USER1…USER4 и т. д.) назначают диапазоны AUX‑каналов.
- Box / Mode (бокс/режим) — логическое состояние “включено/выключено”, которое можно активировать тумблером AUX или автоматически.
- Permanent ID — постоянный числовой ID режима (box), который используется в CLI‑переменных (например, в
pinio_box). - PINIO — абстракция Betaflight для управления GPIO: вы назначаете MCU‑пин как PINIO1…PINIO4 и получаете управляемый цифровой выход.
- “4 слота” PINIO — это до четырёх независимых выходов PINIO1, PINIO2, PINIO3, PINIO4 (по сути 4 канала управления GPIO).
- PINIO BOX / pinio_box — механизм привязки: какой “режим/бокс” включает соответствующий выход PINIO. В CLI это массив из 4 значений.
- pinio_config — конфигурация электрического поведения каждого выхода PINIO (например, инверсия). Это тоже массив из 4 значений.
- USER1…USER4 — пользовательские режимы (user-defined boxes), предназначенные как универсальные “кнопки” для своих задач (очень часто — именно для PINIO).
- User4 — это четвёртый пользовательский режим USER4 с постоянным ID 43.
- ARM — “взведение” / "арминг": режим, при котором FC разрешает запуск моторов (обычно включается отдельным тумблером).
- VTX — видеопередатчик (Video Transmitter).
- Pit Mode — режим VTX с очень низкой мощностью (условно “не светим в эфир на земле”).
- GND — земля (общий минус). Для корректных сигналов у устройств должна быть общая земля.
- 3.3V — типичный уровень логической “1” у STM32‑пинов (логический HIGH).
Быстрая навигация
- 1. Введение и принцип работы
- 2. Определение свободных контактов на полётном контроллере
- 3. Освобождение и переназначение выбранных ресурсов
- 4. Настройка PINIO и привязка через PINIO BOX (pinio_box)
- 5. Настройка вкладки "Modes" в Configurator
- 6. Физическое подключение и проверка
- Краткий алгоритм действий
1. Введение и принцип работы
Функция PINIO позволяет программно управлять состоянием свободных контактов (пинов) полётного контроллера (FC), привязывая их к логическим режимам (Box/Mode). Эти режимы в дальнейшем активируются через AUX‑каналы аппаратуры.
Логика получается следующая: переключили тумблер на пульте → активировался USER‑режим в Modes → Betaflight “включил” соответствующий PINIO → на выбранном физическом выводе появился логический уровень (обычно около 3.3V). Этот уровень можно использовать как:
- управляющий вход устройства (например, “REC”, “TRIG”, “EN”, “REMOTE” — названия зависят от производителя);
- управляющий сигнал на электронный ключ питания (MOSFET), если требуется именно “обесточить/запитать” устройство;
- логическое управление модулем (например, Bluetooth‑UART, подсветкой, VTX‑переключателем и т. д.).
Примечание (практический сценарий с камерой):
Для управления камерой часто требуется два независимых управления: 1) питание (через ключ/модуль питания), 2) старт/стоп записи. Поэтому нередко используются 2 независимых PINIO‑выхода и 2 отдельных AUX‑переключателя (или один 3‑позиционный, если логика устройства это допускает).
2. Определение свободных контактов на полётном контроллере
Первый шаг — выбрать вывод, который: а) физически доступен на плате как пад/пин, к которому можно припаяться; б) программно не занят критически важной функцией или может быть освобождён без потери нужного функционала.
Визуальный осмотр
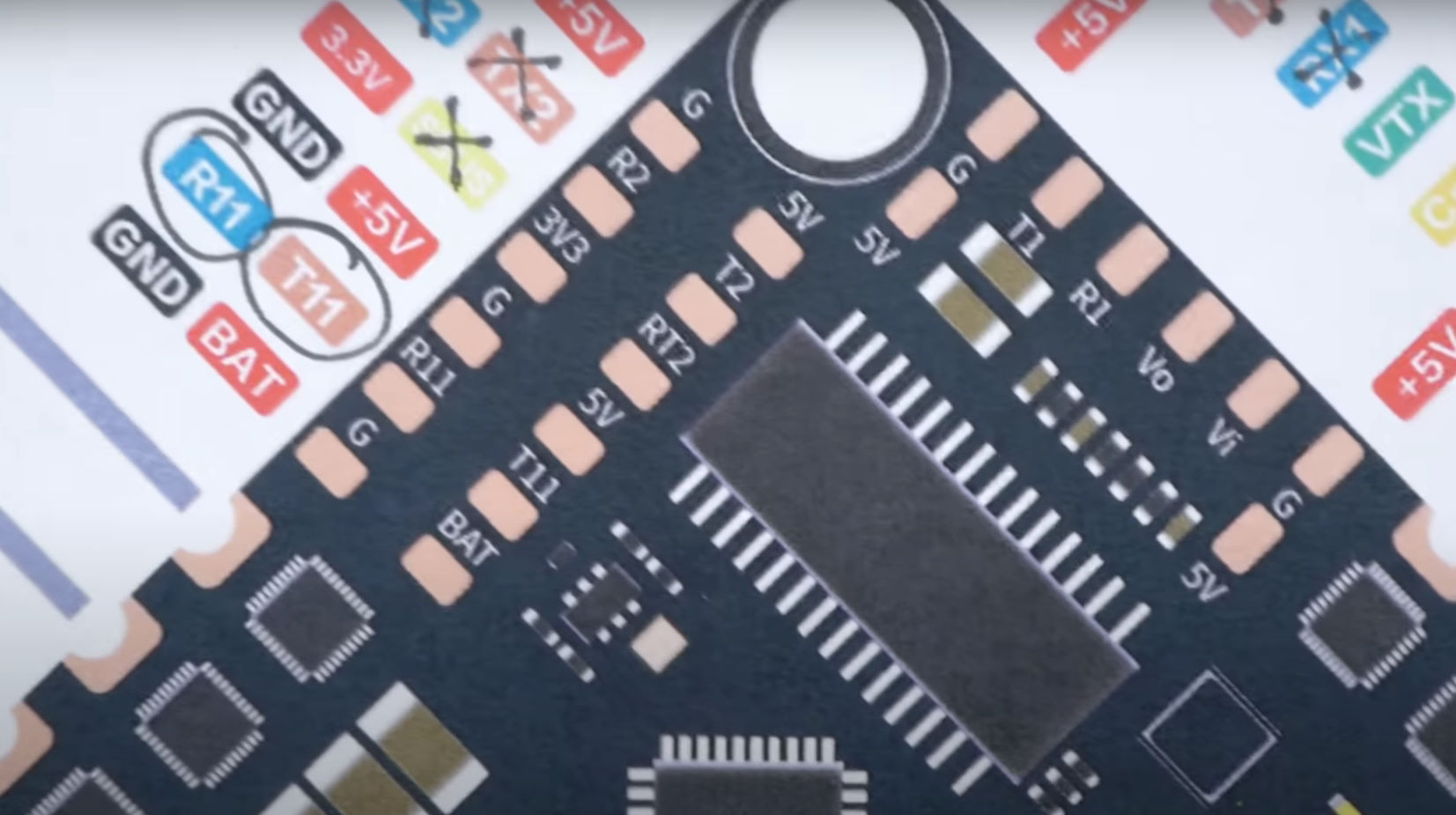
Найдите свободные контактные пады на плате. Типовые кандидаты: незадействованные выводы UART (TX/RX), лишние выходы Motor 5/6 (если плата поддерживает больше моторов, чем вы используете), или площадки под LED‑ленту (LED Strip), если она не используется в сборке.
Проверка в CLI (проверяем “занятость” вывода в прошивке)
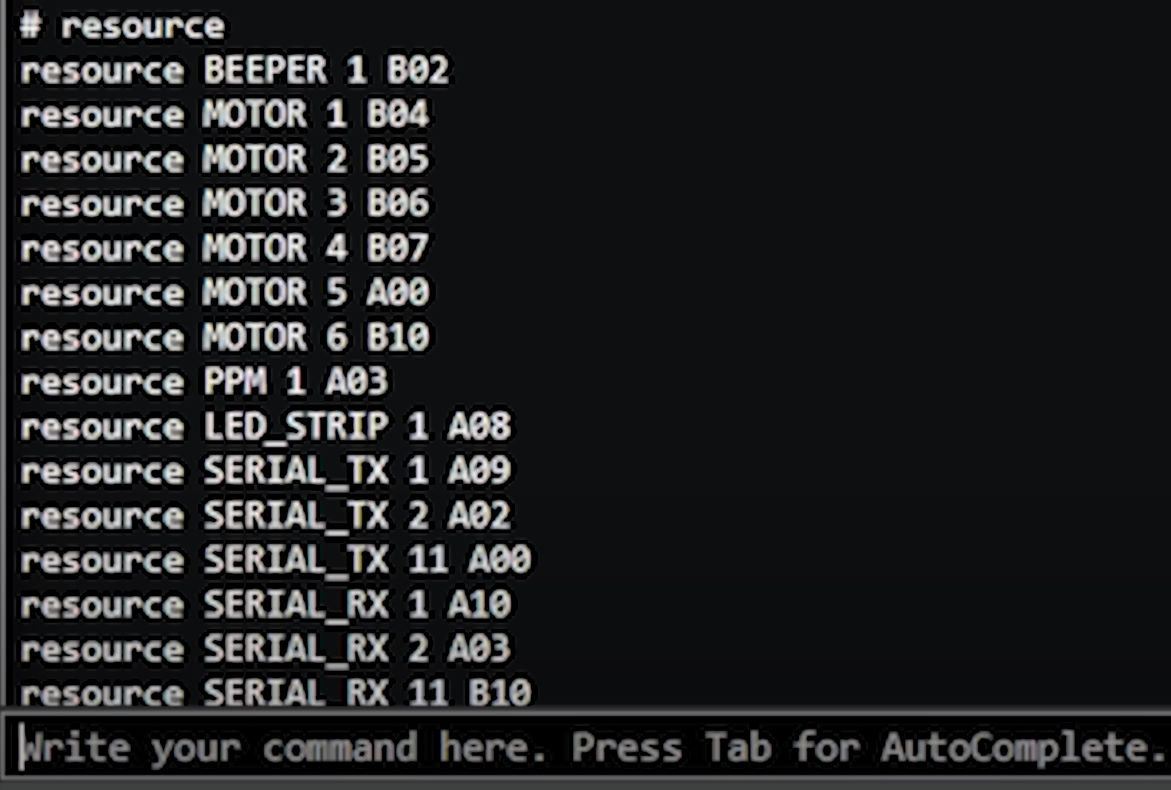
Откройте Betaflight Configurator, подключите FC по USB и перейдите во вкладку CLI. Введите команду:
resourceКоманда resource выводит таблицу “ресурсов” — какие функции (Serial TX/RX, Motor, LED и т. п.) назначены на какие MCU‑пины. Именно здесь вы сопоставляете “пад на плате” (например, R11/T11 по шелкографии) с конкретным обозначением MCU‑вывода (например, B10, A00).
Проанализируйте список и исключите пины, которые уже используются под нужные вам функции: serial_rx/serial_tx (UART для приёмника/периферии), motor (моторные выходы), led (LED‑логика) и т. д.
В демонстрационном примере используются пады R11 (в ресурсах это serial_rx) и T11 (в ресурсах serial_tx). Внутри Betaflight они отображаются как “MCU‑пины” вида B10, A00 и т. п. — конкретное имя зависит от вашей FC и её “таргета” (target).
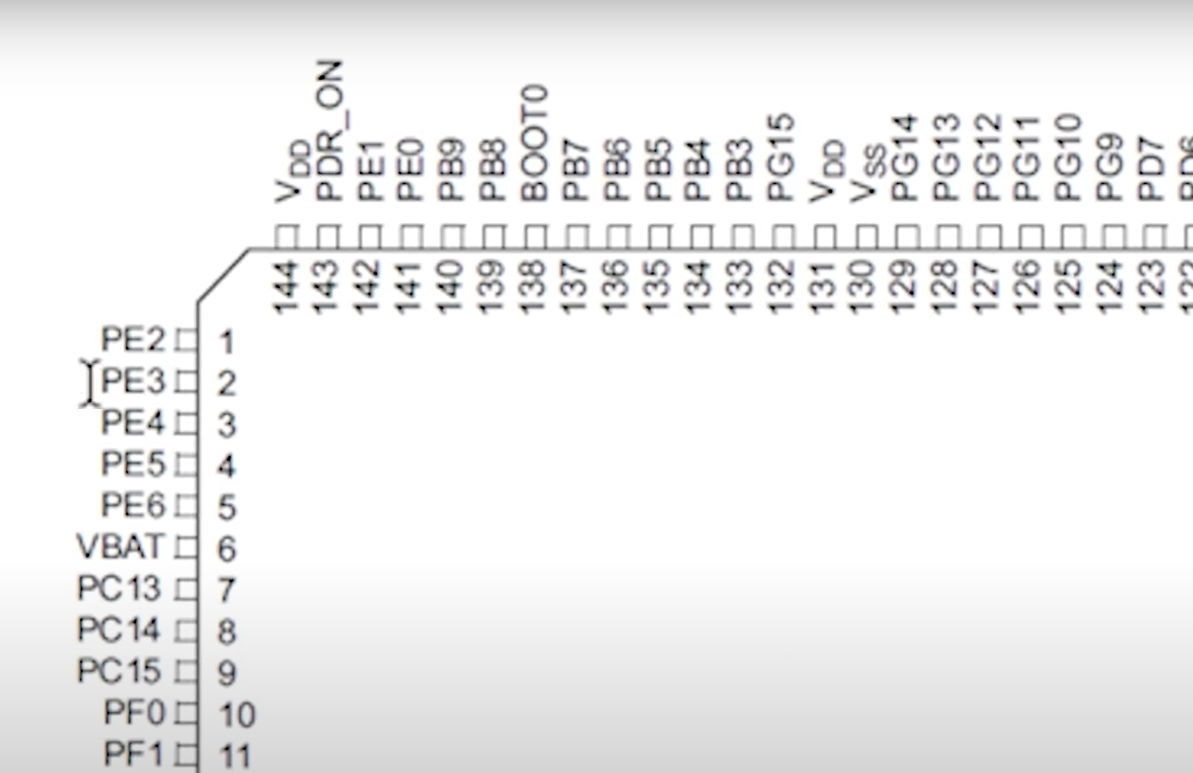
Обозначение выводов контроллера: Axx/Bxx/Cxx — это порты/линии MCU (например, STM32), которые Betaflight использует для ресурсного маппинга.
3. Освобождение и переназначение выбранных ресурсов
Если выбранный вами вывод уже назначен под другую функцию (например, под UART как SERIAL_RX/SERIAL_TX), его необходимо освободить — то есть снять назначение ресурса с этого вывода, чтобы затем использовать его под PINIO.
Внимание!
Перед изменениями сделайте “снимок” текущей конфигурации командой diff all и сохраните вывод в текстовый файл. Это позволит быстро откатиться, если вы освободите не тот ресурс или потеряете связь с устройством.
Освобождение ресурсов
Пример освобождения UART‑ресурсов (номера зависят от вывода команды resource на вашей плате):
resource SERIAL_RX 11 NONE
resource SERIAL_TX 11 NONE(Замените 11 на номер ресурса, который вы увидели в списке resource в разделе 2.)
Сохранение изменений
Сохраните и перезагрузите FC:
save4. Настройка PINIO и привязка через PINIO BOX (pinio_box)
На этом этапе важно развести две сущности, которые чаще всего путают начинающие:
- PINIO — это назначение конкретного MCU‑пина в роль управляемого выхода PINIO1…PINIO4. Делается через resource mapping (команда
resource PINIO ...). - PINIO BOX (CLI‑переменная
pinio_box) — это привязка: какой режим (box/mode) включает какой PINIO‑выход. И именно это часто в разговорной речи называют “pinio box / pinio box настройка”.
Почему “четыре слота” и зачем они?
Betaflight поддерживает до 4 независимых выходов PINIO: PINIO1, PINIO2, PINIO3, PINIO4. Поэтому и pinio_box, и pinio_config имеют вид “четырёх чисел через запятую”: первое число относится к PINIO1, второе — к PINIO2, третье — к PINIO3, четвёртое — к PINIO4.
Даже если вы используете 1–2 выхода, остальные позиции массива сохраняются и обычно выставляются в “не используется”.
4.1 Проверка предустановок (вдруг PINIO уже настроен производителем FC)
Некоторые “таргеты” FC идут с преднастроенными PINIO (например, под питание VTX, камеру или встроенный Bluetooth‑модуль). Поэтому сначала проверьте текущие значения:
resource
get pinio_config
get pinio_boxЕсли вы видите строки вида resource PINIO 1 B00 — значит на плате уже определён PINIO‑вывод. Тогда при добавлении новых PINIO важно не “перезатереть” существующий индекс, а использовать следующий свободный (например, PINIO 2/3/4).
4.2 Назначаем физический вывод MCU как PINIO (это “железное” назначение)
После того как вы выбрали подходящий MCU‑пин (например, B10) и освободили его от чужих функций, назначьте его под один из PINIO‑выходов. Пример:
resource PINIO 1 B10Где PINIO 1 — это первый “слот” (первый управляемый выход PINIO1), а B10 — имя MCU‑пина, увиденное/выведенное в контексте resource.
Затем сохраните:
save4.3 Настройка логики выхода PINIO (pinio_config)
Переменная pinio_config — это массив из 4 чисел, который задаёт электрическое поведение каждого (всех четырех по порядку) PINIO‑выхода: “обычный” (push‑pull) вывод, либо инвертированный (когда логика HIGH/LOW меняется местами относительно состояния режима).
Практическая интерпретация:
- 1 — стандартный push‑pull вывод: при активном режиме PINIO выдаёт HIGH (≈3.3V), при неактивном — LOW (≈0V).
- 129 (= 128 + 1) — инвертированный push‑pull: при активном режиме PINIO выдаёт LOW, при неактивном — HIGH.
Пример (инвертируем только второй PINIO, остальные оставляем стандартными):
set pinio_config = 1,129,1,1
save4.4 PINIO BOX (pinio_box): “к чему привязать включение выхода”
Вот здесь и находится ответ на вопрос “что такое pinio box?”: PINIO BOX — это механизм, который связывает режим (Box/Mode) и выход PINIO. CLI‑переменная pinio_box хранит Permanent ID режимов.
Ключевой момент:
pinio_box— это не “номера пинов” и не “номера UART”. Это список ID режимов, которые будут включать PINIO1…PINIO4.
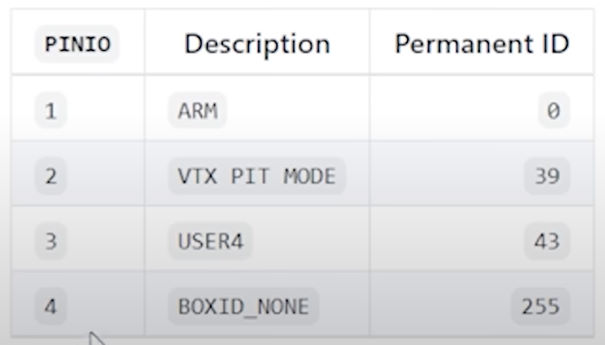
Пример (как на скриншоте): привязка PINIO1 к ARM (ID 0), PINIO2 к VTX PIT MODE (ID 39), PINIO3 к USER4 (ID 43), PINIO4 не используется (255).
set pinio_box = 0, 39, 43, 255Расшифровка того, что вы видите:
- 0 — это режим ARM (взведение): когда вы “армите” коптер, включается соответствующий PINIO.
- 39 — это режим VTX PIT MODE: когда активирован Pit Mode, включается соответствующий PINIO.
- 43 — это
режимUSER4 (то есть “User4”): пользовательский режим, который вы можете повесить на AUX‑переключатель. - 255 — это BOXID_NONE (“не используется”): четвёртый выход PINIO ни к чему не привязан.
USER1–USER4 и их ID:
- USER1 = 40
- USER2 = 41
- USER3 = 42
- USER4 = 43
4.5 Типовой вариант “под управление с пульта”: привязка к USER1/USER2
Если вы хотите, чтобы управление было именно с аппаратуры через вкладку Modes, чаще всего используют USER‑режимы:
set pinio_box = 40, 41, 255, 255
saveПосле этого в Configurator на вкладке Modes вы увидите User 1 и User 2 и сможете назначить их на AUX.
5. Настройка вкладки "Modes" в Configurator
После перезагрузки FC (после save) в графическом интерфейсе Betaflight на вкладке Modes появятся (или станут доступными) соответствующие пользовательские режимы User 1, User 2 (и т. д. — в зависимости от того, какие USER‑ID вы использовали в pinio_box).

Назначение переключателей (AUX)
Назначьте каждому режиму (User 1 / User 2 / …) отдельный AUX‑канал (или разные положения 3‑позиционного переключателя). AUX‑канал — это канал приёмника, который соответствует физическому тумблеру/крутилке на аппаратуре.

Рекомендуемая логика (пример для камеры)
- User 1 — управление записью (старт/стоп). Логика зависит от камеры/модуля: где-то нужен “импульс”, где-то — удержание уровня, где-то — замыкание на GND через схему. Поэтому до пайки желательно понять, что именно ожидает вход “REC/REMOTE/TRIG”.
- User 2 — управление питанием камеры. На практике это чаще делается так: PINIO управляет входом электронного ключа (MOSFET/power‑switch), а уже ключ включает питание камеры.
Дополнительная полезная настройка (именование USER‑режимов):
В Betaflight можно переименовать USER‑режимы, чтобы в Modes они отображались понятнее (например “CAM_REC”, “CAM_PWR”). Для этого используются переменные: box_user_1_name … box_user_4_name. Это не влияет на ID (40–43) и на логику pinio_box, меняется только название в интерфейсе.
6. Физическое подключение и проверка
Пайка (подключение к выбранному паду)
Припаяйте сигнальные провода к выбранным контактным падам на FC (в примере — бывшие R11 и T11). Пайка (soldering) — это электрическое и механическое соединение провода и площадки припоем.
Общая земля (GND)
Если вы подаёте PINIO‑сигнал на внешнее устройство, почти всегда нужно обеспечить общий “ноль”: соединить GND устройства с GND FC. Иначе уровни HIGH/LOW могут быть не распознаны.
Проверка мультиметром (измеряем HIGH/LOW)
Мультиметр — измерительный прибор, которым можно измерять напряжение. Для проверки:
- Снимите пропеллеры (техника безопасности при любых тестах питания и режимов).
- Подайте питание на БПЛА.
- Переключайте AUX‑переключатели, на которые назначены User 1 / User 2.
- Измерьте напряжение между выбранным PINIO‑падом и GND: при активации режима ожидается логическая “1” (обычно около 3.3V), при деактивации — логический “0” (около 0V), либо наоборот при включённой инверсии (pinio_config = 129).
Подключение к камере / модулю управления
Подключите сигнальный провод к соответствующему контакту на камере или на плате управления (часто это вход с маркировкой вида “Remote/Rec/Trig/En” — конкретное название зависит от устройства). Второй провод (земля) соединяется с GND на FC.
Электрическая совместимость входов:
Некоторые устройства ожидают “включение” по уровню HIGH (≈3.3V), другие — по уровню LOW (0V), а третьи — вообще ожидают “замыкание на землю” через определённое сопротивление/схему. Если устройство не реагирует “как должно”, первая диагностика — проверить: 1) есть ли общий GND, 2) меняется ли уровень на PINIO, 3) не требуется ли инверсия (pinio_config = 129), 4) не нужен ли транзисторный ключ/развязка.
Краткий алгоритм действий:
- Найти подходящий вывод/пад и проверить назначение через
resource. - Освободить вывод, если он занят:
resource ... NONE. - Назначить вывод как PINIO:
resource PINIO n <MCU_PIN>. - Проверить/настроить логику выхода:
get/set pinio_config. - Привязать PINIO к режиму:
set pinio_box = ...(например, 40/41 для USER1/USER2). - Во вкладке Modes назначить User 1 / User 2 на нужные AUX‑переключатели.
- Припаять провода, обеспечить общий GND, проверить уровни мультиметром, затем подключить к устройству.
Важно:
Инструкция универсальная, но конкретные имена MCU‑пинов (например, B10, A00) и доступные ресурсы нужно обязательно сверять для вашей модели полётного контроллера командой resource.
Обзор от группы разработчиков betaflight
PINIO — это абстракция простого интерфейса GPIO (General Purpose Input/Output — универсальные входы/выходы).
PINIO BOX — это механизм для привязки логических боксов (режимов) к выходам PINIO.
Большинство целевых плат (flight controllers) поддерживают настройку до четырёх выводов для функции PINIO, которыми затем можно управлять через PINIO BOX.
PINIO
Вывод микроконтроллера (MCU) можно назначить на PINIO с помощью CLI-команды resource:
resource PINIO <индекс> <ID_вывода>
Пример назначения ресурсов для PINIO:
resource PINIO 1 A01 resource PINIO 2 A08 resource PINIO 3 C99 resource PINIO 4 D02
Конфигурация PINIO (PINIO CONFIG)
Конфигурация режима работы каждого вывода задаётся CLI-переменной pinio_config. Это список (массив) из 8-битных значений, разделённых запятыми.
Старший бит (MSB) указывает на инверсию сигнала, а оставшиеся 7 бит определяют режим ввода/вывода согласно описанию в drivers/pinio.h (в текущей реализации поддерживается только режим push-pull output).
| Константа | HEX | DEC | Описание |
|---|---|---|---|
| PINIO_CONFIG_OUT_INVERTED | 0x80 | 128 | Инвертированный выход |
| PINIO_CONFIG_MODE_MASK | 0x7F | 127 | Маска для режима |
| PINIO_CONFIG_MODE_OUT_PP | 0x01 | 1 | Выход в режиме Push-Pull (двухтактный выход) |
Примечание: Значения можно комбинировать, например, инверсия плюс режим.
Пример значения pinio_config:
set pinio_config = 1,129,1,1
Это означает:
- режим Output-Push-Pull для PINIO #1, #3 и #4
- режим Inverted Output-Push-Pull для PINIO #2 (128 + 1 = 129)
Значение по умолчанию: 1 (Output-Push-Pull).
PINIO BOX (Бокс ПИНИО)
CLI-переменная pinio_box — это список, разделённый запятыми, из постоянных ID боксов (Permanent ID). Она связывает боксы с соответствующими выходами PINIO.
После привязки статус активации бокса (включён/выключен) отражается на состоянии связанного выхода PINIO (и, следовательно, на физическом выводе). Механизм PINIO BOX самостоятельно отслеживает состояние активации боксов и работает независимо от их основного назначения, по сути расширяя управление выходами PINIO через боксы.
Постоянные ID с 40 по 43 соответствуют пользовательским боксам USER1–USER4, которые отображаются в списках боксов на вкладке «Modes» в конфигураторе.
Пример установки pinio_box:
set pinio_box = 0,39,43,255
При такой настройке PINIO #1–#4 будут связаны с бокcами:
| PINIO | Описание | Постоянный ID |
|---|---|---|
| 1 | ARM (Взведение) | 0 |
| 2 | VTX PIT MODE | 39 |
| 3 | USER4 | 43 |
| 4 | BOXID_NONE (Не используется) | 255 |
Таблица постоянных ID боксов (AUX-режимов) — источник msp/msp_box.c:
| Бокс (Box) | Режим (Mode) | ID | Примечания |
|---|---|---|---|
| BOXARM | ARM | 0 | |
| BOXANGLE | ANGLE | 1 | |
| BOXHORIZON | HORIZON | 2 | |
| BOXALTROLD | ALTITUDE HOLD | 3 | добавлено в 4.6 |
| BOXANTIGRAVITY | ANTI GRAVITY | 4 | |
| BOXMAG | MAG | 5 | |
| BOXHEADFREE | HEADFREE | 6 | |
| BOXHEADADJ | HEADADJ | 7 | |
| BOXCAMSTAB | CAMSTAB | 8 | |
| BOXCAMTRIG | CAMTRIG | 9 | удален |
| BOXGPSHOME | GPS HOME | 10 | удален |
| BOXPOSHOLD | POSITION HOLD | 11 | добавлено в 4.6 |
| BOXPASSTHRU | PASSTHRU | 12 | |
| BOXBEEPERON | BEEPER | 13 | |
| BOXLEDMAX | LEDMAX | 14 | удален |
| BOXLEDLOW | LEDLOW | 15 | |
| BOXLLIGHTS | LLIGHTS | 16 | удален |
| BOXCALIB | CALIB | 17 | |
| BOXGOV | GOVERNOR | 18 | удален |
| BOXOSD | OSD DISABLE SW | 19 | |
| BOXTELEMETRY | TELEMETRY | 20 | |
| BOXGTUNE | GTUNE | 21 | удален |
| BOXRANGEFINDER | RANGEFINDER | 22 | удален |
| BOXSERVO1 | SERVO1 | 23 | |
| BOXSERVO2 | SERVO2 | 24 | |
| BOXSERVO3 | SERVO3 | 25 | |
| BOXBLACKBOX | BLACKBOX | 26 | |
| BOXFAILSAFE | FAILSAFE | 27 | |
| BOXAIRMODE | AIR MODE | 28 | |
| BOX3D | DISABLE / SWITCH 3D | 29 | |
| BOXFPVANGLEMIX | FPV ANGLE MIX | 30 | |
| BOXBLACKBOXERASE | BLACKBOX ERASE (>30s) | 31 | |
| BOXCAMERA1 | CAMERA CONTROL 1 | 32 | |
| BOXCAMERA2 | CAMERA CONTROL 2 | 33 | |
| BOXCAMERA3 | CAMERA CONTROL 3 | 34 | |
| BOXFLIPOVERAFTERCRASH | FLIP OVER AFTER CRASH | 35 | |
| BOXPREARM | PREARM | 36 | |
| BOXBEEPGPSCOUNT | BEEP GPS SATELLITE COUNT | 37 | |
| BOX3DDISABLESWITCH | 3D ON A SWITCH | 38 | удален |
| BOXVTXPITMODE | VTX PIT MODE | 39 | |
| BOXUSER1 | USER1 | 40 | |
| BOXUSER2 | USER2 | 41 | |
| BOXUSER3 | USER3 | 42 | |
| BOXUSER4 | USER4 | 43 | |
| BOXPIDAUDIO | PID AUDIO | 44 | |
| BOXPARALYZE | PARALYZE | 45 | |
| BOXGPSRESCUE | GPS RESCUE | 46 | |
| BOXACROTRAINER | ACRO TRAINER | 47 | |
| BOXDISABLEVTXCONTROL | DISABLE VTX CONTROL | 48 | |
| BOXLAUNCHCONTROL | LAUNCH CONTROL | 49 | |
| BOXMSPOVERRIDE | MSP OVERRIDE | 50 |
Примечание: Значение 255 определено как BOXID_NONE и означает, что слот PINIO не используется.
Примеры использования
Включение/выключение устройств
Многие встроенные или внешние устройства/модули имеют специальный провод для включения/выключения. Поведение зависит от устройства:
- Некоторым требуется подать сигнал HIGH (логическую 1, примерно 3.3 В) на этот провод для включения.
- Другим требуется сигнал LOW (логический 0, примерно 0 В) для включения.
Обязательно изучите документацию вашего устройства для правильного подключения.
Поиск предопределённых функций PINIO
Некоторые полётные контроллеры поставляются с заранее настроенными PINIO, например для переключения камеры, подачи питания VTX или управления встроенным Bluetooth.
Используйте команду resource на работающей плате для просмотра назначения выводов:
resource PINIO 1 B00
Это означает, что PINIO #1 назначен на вывод B00. Для добавления новых PINIO не удаляйте существующие ресурсы, а увеличивайте индекс.
Отключение встроенного Bluetooth при взведении мотора (ARM)
Большинство контроллеров с Bluetooth модулем имеют настройку по умолчанию. Пример конфигурации:
# resource ... resource PINIO 1 B00 # get pinio_config pinio_config = 129,1,1,1 # get pinio_box pinio_box = 0,255,255,255
PINIO #1 назначен на вывод B00, pinio_box равен 0, что соответствует боксу BOXARM (ARM). При взведении бокс активируется.
pinio_config равно 129 (128 + 1), то есть PINIO настроен как Output-Push-Pull с инверсией. Физический сигнал на выводе инвертирован — при активации бокса сигнал LOW (~0 В).
Встроенный Bluetooth выключается подачей LOW на вывод (по проекту схемы).
Отключение внешнего Bluetooth UART-адаптера при взведении мотора (ARM)
Принцип тот же, что и для встроенного модуля. Для настройки:
- Выберите свободный вывод для управления устройством.
- Уточните, какой сигнал (HIGH или LOW) требуется для включения/выключения устройства.
Пример:
Имеется PPM-вывод B09, который освобождается для управления внешним Bluetooth-модулем с проводом POWER или ENABLE. Документация показывает, что сигнал LOW выключает модуль.
Для настройки:
resource PPM B09 resource PINIO 1 C08 resource PINIO 2 C09 resource PPM none resource PINIO 3 B09 # get pinio_config pinio_config = 1,1,1,1 # set pinio_config = 1,1,129,1 # Устанавливаем инверсию (129) для PINIO #3 # get pinio_box pinio_box = 40,41,255,255 # set pinio_box = 40,41,0,255 # Привязываем PINIO #3 к боксу ARM (ID=0) # save
Комментарий:
- Для PINIO #3 изменяем
pinio_configс 1 на 129 (инверсия), чтобы устройство выключалось при активации бокса (ARM). - Изменяем
pinio_boxс 255 на 0 (BOXARM), чтобы PINIO #3 активировался при взведении. - Не забывайте выполнять команду
save.
Включение Bluetooth в режиме Pit Mode (VTX PIT MODE)
Идентичная настройка, но для pinio_box PINIO #3 устанавливаем 39 (BOXVTXPITMODE), чтобы Bluetooth включался при активации Pit Mode.
Управление включением/выключением VTX с пульта с помощью пользовательской функции (USERn)
Цель — управлять питанием VTX с помощью переключателя на пульте.
Требуется:
- VTX с выводом для включения/выключения (POWER / ENABLE)
- Функция на плате контроллера, позволяющая отключать питание VTX (готовый модуль типа RealPit или самодельная схема с транзистором)
- Использование одного из боксов BOXUSER<n> (ID 40–43), который появится на вкладке Modes и может быть назначен на канал пульта
Пример:
# resource resource PPM B03 # resource PPM none # освобождаем ресурс PPM # resource PINIO 1 B03 # назначаем вывод B03 на PINIO #1 # get pinio_box pinio_box = 255,255,255,255 # set pinio_box = 40,255,255,255 # привязываем PINIO #1 к боксу USER1 (ID=40) # save
Комментарий:
pinio_configменять не требуется — значение по умолчанию 1 (Output-Push-Pull) подходит для включения по сигналу HIGH.- Первое значение
pinio_boxустанавливается в 40 (BOXUSER1), так как это первая пользовательская функция. - После сохранения в конфигураторе на вкладке Modes появится режим USER1, который можно привязать к каналу пульта.
- Не забудьте выполнить
save.
Внешние URLs:
Добавить комментарий