

")
AM32 Настройка регуляторов оборотов двигателей (ESC)
Обновленная и исправленная версия статьи.
Регуляторы оборотов (ESC) с прошивкой AM32 — основной элемент силовой установки современных БПЛА. Настройка ESC напрямую влияет на эффективность, безопасность и надёжность аппарата. В этом материале разобраны все параметры конфигуратора AM32 с техническими обоснованиями, типичными ошибками и практическими задачами для отработки навыков.
Главная идея: ESC — это не просто «регулятор скорости». Это сложное устройство с десятками параметров. Неправильно настроенный Timing Advance, неверно указанное Motor KV или отключённый Low Voltage Cut Off могут привести к отказу мотора, потере аппарата или пожару аккумулятора. Этот материал учит понимать, что каждый параметр делает и почему он установлен именно так.
Содержание
1. Цели статьи
- Понять назначение каждого параметра конфигуратора AM32 на техническом уровне.
- Уметь безопасно подключать, читать и сохранять конфигурацию ESC.
- Знать, какие параметры критически важны для безопасности аппарата и аккумулятора.
- Уметь обновлять прошивку ESC, создавать резервные копии и восстанавливать конфигурацию.
- Различать типичные ошибки настройки и знать, как их устранить.
2. Глоссарий и архитектура ESC
ESC (Electronic Speed Controller, регулятор оборотов) — электронное устройство, которое принимает цифровую или аналоговую команду от полётного контроллера (FC) и преобразует её в управляющие импульсы на трёх фазных обмотках бесколлекторного двигателя (BLDC). Внутри ESC стоят шесть силовых транзисторов (MOSFET), образующих трёхфазный мост, и микроконтроллер, который управляет их переключением согласно алгоритму, заложенному в прошивку.
AM32 — открытая (open-source) прошивка для ESC на 32-битных ARM-микроконтроллерах (STM32, GD32, AT32). Является свободной альтернативой проприетарной BLHeli_32, поддержка которой прекращена. Позволяет производителям не платить лицензионные сборы, что делает AM32-совместимые регуляторы доступнее по цене.
| Термин | Расшифровка | Суть |
|---|---|---|
ESC |
Electronic Speed Controller | Регулятор оборотов бесколлекторного двигателя |
FC |
Flight Controller | Полётный контроллер — мозг БПЛА |
BLDC |
Brushless DC Motor | Бесколлекторный двигатель постоянного тока |
MOSFET |
Metal-Oxide-Semiconductor FET | Полевой транзистор — силовой ключ ESC |
Firmware |
Прошивка | Программа в flash-памяти микроконтроллера ESC |
Bootloader |
Начальный загрузчик | Минимальная программа, позволяющая записать основную прошивку |
EEPROM |
Electrically Erasable Programmable ROM | Энергонезависимая память для хранения настроек пользователя |
Back-EMF |
Back Electromotive Force | Обратная ЭДС — напряжение вращающегося ротора; используется для определения его положения |
KV |
RPM per Volt | Обороты в минуту на 1 В без нагрузки. Пример: 2300 KV × 14,8 В ≈ 34 040 об/мин |
Passthrough |
Режим ретрансляции | FC «прозрачно» пересылает данные между ПК и ESC без обработки |
PWM |
Pulse Width Modulation | Широтно-импульсная модуляция — и протокол FC→ESC, и метод управления MOSFET |
DShot |
Digital Shot | Цифровой протокол FC→ESC с контрольной суммой CRC |
CRC |
Cyclic Redundancy Check | Контрольная сумма в пакете DShot — защита от помех |
eRPM |
Electrical RPM | Электрические обороты; механические RPM = eRPM ÷ количество пар полюсов |
Bidirectional DShot |
BDShot | Двунаправленный DShot: ESC отправляет eRPM обратно в FC для RPM Filtering |
Коммутация |
Commutation | Переключение фаз мотора по определённому алгоритму для создания вращения |
Timing Advance |
Опережение коммутации | Угол (°), на который переключение фаз опережает фактическое положение ротора |
LVC |
Low Voltage Cutoff | Защита от глубокого разряда аккумулятора |
Dead Band |
Мёртвая зона | Диапазон сигнала вокруг нейтрали, при котором ESC не подаёт напряжение на мотор |
Freewheel |
Свободный выбег | Мотор продолжает вращаться по инерции при нулевом газе |
Протоколы связи FC → ESC
Протокол определяет, как полётный контроллер передаёт команды на ESC. Правильный выбор протокола критичен для точности управления и отсутствия помех.
| Протокол | Тип | Скорость обновления | Калибровка | CRC | Применение |
|---|---|---|---|---|---|
PWM (Servo) |
Аналоговый | до 400 Гц | Требуется | Нет | ArduPilot, устаревшее оборудование |
DShot 300 |
Цифровой | ≈ 1000 Гц | Не нужна | Да | F4 FC, PID до 4 кГц |
DShot 600 |
Цифровой | ≈ 2000 Гц | Не нужна | Да | Рекомендован для FPV и гоночных БПЛА |
# Структура пакета DShot600
Биты 15–5 : значение газа [0 .. 2047]
Бит 4 : телеметрия [0 | 1]
Биты 3–0 : CRC [0x0 .. 0xF]
# Формула CRC:
CRC = (value ^ (value >> 4) ^ (value >> 8)) & 0x0F
# Примеры значений газа:
0 → мотор остановлен
48 → минимальный газ (idle)
2047 → 100% газаВнутренняя архитектура ESC
Внутри ESC работают три взаимосвязанных слоя: силовой каскад (6 MOSFET в трёхфазном мосту), логический контроллер (ARM-MCU с прошивкой AM32) и драйверы затворов (управляют MOSFET согласно командам MCU). Алгоритм трапециевидной коммутации переключает фазы ступенчато; синусоидальный — плавно, что важно на малых оборотах.
# Упрощённая схема трёхфазного моста ESC
БАТАРЕЯ (+)
|
┌─────────┼─────────┐
[Q1] [Q3] [Q5] ← верхние MOSFET (high-side)
| | |
Фаза A Фаза B Фаза C → к обмоткам мотора
| | |
[Q2] [Q4] [Q6] ← нижние MOSFET (low-side)
└─────────┴─────────┘
БАТАРЕЯ (-)3. Программное обеспечение и подключение
Конфигуратор AM32
Для настройки и прошивки ESC используется Multi_ESC Config Tool (оффлайн, Windows/Linux/macOS) или онлайн-конфигуратор на am32.ca (работает в Chrome/Edge через Web Serial API). Оба инструмента функционально идентичны.
| Инструмент | Тип | Где получить | Когда использовать |
|---|---|---|---|
Multi_ESC Config Tool |
Настольное приложение | GitHub: AlkaMotors/AM32 | Полевые условия, слабый интернет |
AM32 Online Configurator |
Веб-приложение | am32.ca | Без установки ПО, Chrome/Edge |
ESC-Configurator |
Веб-приложение | esc-configurator.com | Поддержка AM32 + BLHeli_S + Bluejay |
Схема подключения и Passthrough
ESC не подключается напрямую к ПК. Связь осуществляется через полётный контроллер с прошивкой BetaFlight или INAV, поддерживающих режим Passthrough. В этом режиме FC выступает прозрачным мостом между конфигуратором и каждым ESC по сигнальным линиям мотора (M1–M4).
# Схема подключения
ПК (USB)
│
│ USB-кабель
▼
Полётный контроллер (Betaflight / INAV Passthrough)
│ Сигнальные линии M1, M2, M3, M4
├───────────────────────────────────────────────────┐
▼ ▼ ▼ ▼
ESC #1 ESC #2 ESC #3 ESC #4
│ │
└───────────────── Аккумулятор LiPo ────────────────┘
(без пропеллеров!)Чтение конфигурации (Read)
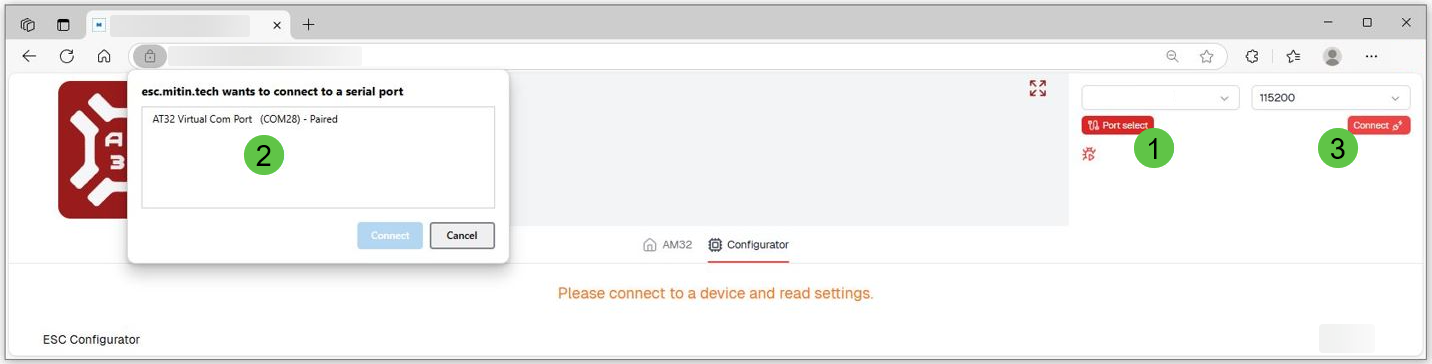
После выбора COM-порта и нажатия Connect → Read конфигуратор последовательно опрашивает каждый ESC и отображает:
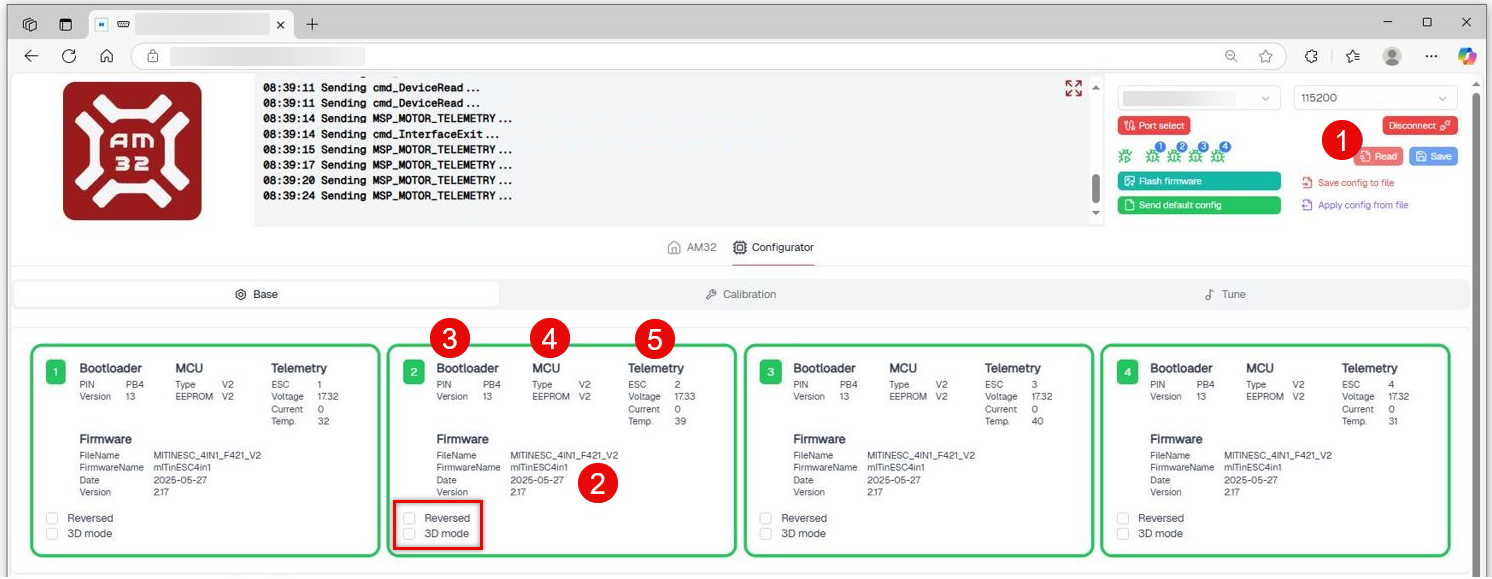
| Поле | Что показывает | Когда важно |
|---|---|---|
Firmware |
Например: AM32_2.17 |
Перед обновлением — проверить актуальность |
Bootloader |
Версия начального загрузчика | Обновляется только через программатор |
MCU |
Формат структуры данных настроек EEPROM | При смене версии — выполнить сброс к заводским |
Telemetry |
Телеметрия. Напряжение, ток, температура, eRPM | Если не обновляется — отключить и включить питание на ESC повторно |
Типичные ошибки подключения
CP2102, CH340, FTDI. Установите драйвер и перезапустите конфигуратор.4. Основные параметры двигателя (Motor Settings)
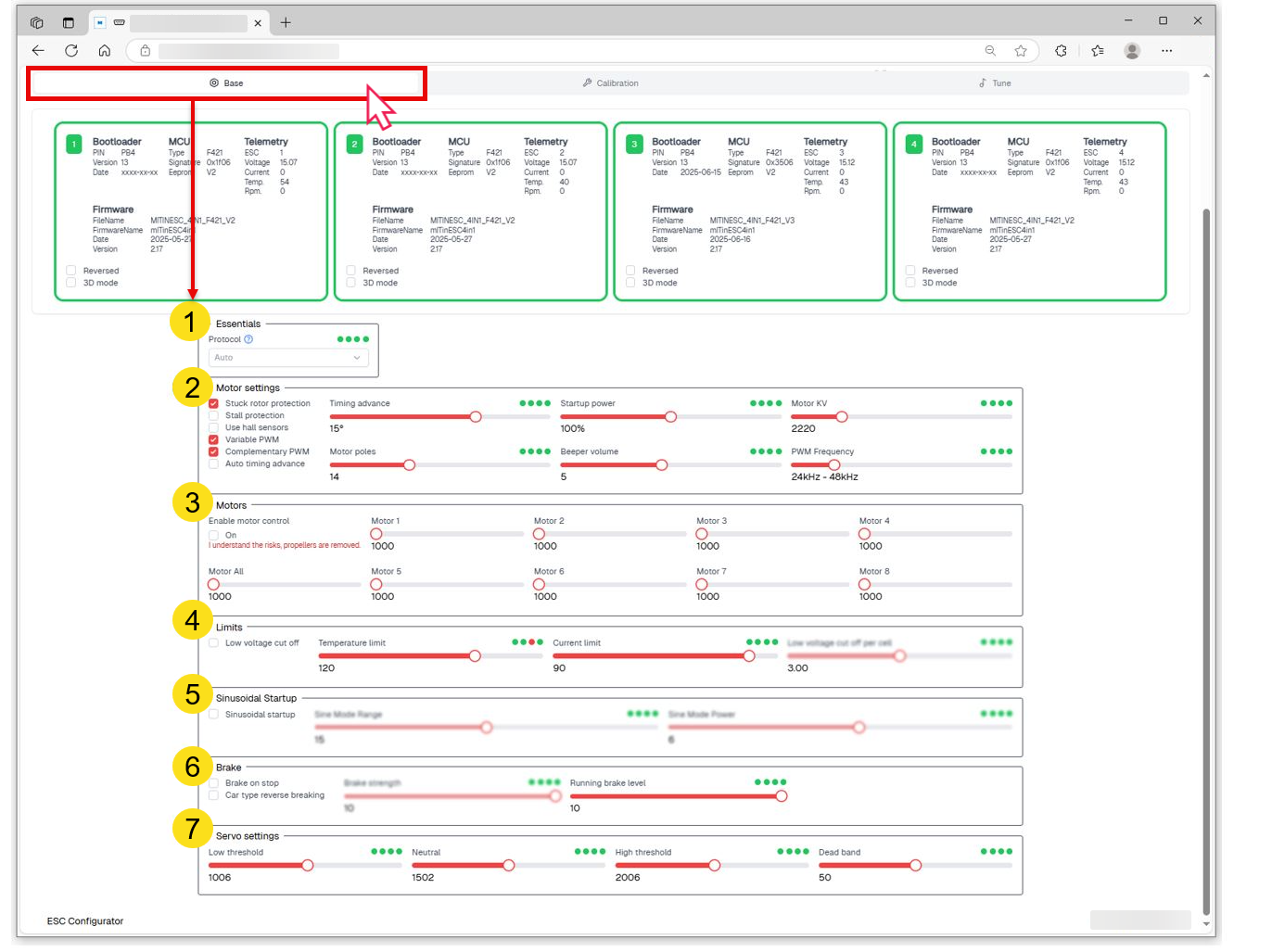
Essentials — протокол обмена
Параметр Essentials задаёт протокол связи FC → ESC. При значении auto ESC при включении прослушивает входной сигнал и автоматически определяет протокол. Это рекомендуемый вариант для большинства сборок.
# Алгоритм auto-определения протокола при старте ESC
1. ESC подаёт питание → ждёт сигнал на входе
2. Если сигнал аналоговый (1000–2000 мкс) → режим Servo PWM
3. Если сигнал цифровой 600 кбит/с → режим DShot 600
4. Если сигнал цифровой 300 кбит/с → режим DShot 300
# Рекомендация: оставить auto
# Ручное задание — только при отладке конкретных проблем совместимостиMotor Settings — все параметры
| Параметр | По умолч. | Диапазон | Описание и рекомендация |
|---|---|---|---|
3D Mode |
Выкл. | Вкл / Выкл | Делит диапазон газа пополам: нижняя половина — вращение назад, верхняя — вперёд, центр — нейтраль. Используется в RC-краулерах и 3D-акробатике. Для стандартных мультироторов — отключить. |
Reverse Rotation |
Выкл. | Вкл / Выкл | Программная смена направления вращения без перепайки проводов фаз. Альтернатива: физически поменять местами любые два провода мотора. |
Stuck Rotor Protection |
Вкл. | Вкл / Выкл | При обнаружении заклинивания ротора ESC прекращает попытки запуска до возврата газа в ноль. Предотвращает перегрев обмоток. FPV-дроны — включить. Краулеры — отключить (иначе ESC прекратит попытки при преодолении препятствия). |
Stall Protection |
Выкл. | Вкл / Выкл | При внезапной остановке ротора ESC подаёт дополнительный импульс для возобновления вращения. Полезна для RC-краулеров на подъёмах. Для мультироторов — осторожно. |
Variable PWM |
Вкл. | Вкл / Выкл | Динамически изменяет частоту переключения MOSFET в зависимости от оборотов. На малых оборотах — ниже частота (меньше нагрев), на высоких — выше (точнее управление). Исключает интерференцию частоты ШИМ с частотой коммутации. Рекомендуется всегда включать. |
Complementary PWM |
Вкл. | Вкл / Выкл | При снижении газа нижний MOSFET открывается синхронно — создаётся рекуперативное торможение. Мотор быстро замедляется вместо выбега по инерции (freewheel). Критично для отзывчивости FPV-дронов. Всегда включать. |
Auto Timing Advance |
Вкл. | Вкл / Выкл | ESC автоматически подстраивает угол опережения коммутации. Параметр Timing Advance используется как базовое значение. Рекомендуется включать. |
Timing Advance |
2 (= 15°) | 1–7 (шаг 7,5°) | Угол опережения фаз. Значение 2 = 15° — баланс мощности и нагрева. Высокие значения (22–30°) дают больше мощности, но сильнее греют. Слишком высокое → риск десинхронизации (desync). |
Startup Power |
100% | 50–150%, шаг 5% | Мощность в течение первых нескольких коммутаций при старте из покоя. Не влияет на характеристики после раскрутки. Увеличивать только при проблемах с запуском тяжёлых пропеллеров. |
Motor KV |
2200 | 100–4000+ | Вводится реальное значение KV вашего мотора. ESC использует это значение для ограничения мощности на малых оборотах. Неверное значение может привести к снижению тяги или проблемам при старте. |
Motor Poles |
14 | Чётное число | Количество магнитных полюсов ротора. Большинство FPV-моторов — 14 (7 пар). Используется для расчёта скорости перехода из синусоидального режима в трапециевидный. Считайте магниты на роторе. |
Beep Volume |
5 | 0–11 | Громкость звуковых сигналов, издаваемых через мотор. 0 — отключить. Сигналы используются для идентификации готовности и поиска аппарата. |
PWM Frequency |
24 кГц | 16 / 24 / 48 / 96 кГц | Частота переключения MOSFET. Не путать с частотой протокола DShot и частотой PID-цикла FC. 24 кГц — баланс нагрева и управления. 48 кГц — плавнее, но MOSFET греются сильнее. |
# Расчёт угла Timing Advance из значения параметра
угол_градусов = значение_параметра × 7.5
# Примеры:
значение 1 → 7.5° (минимальный нагрев, меньше мощности)
значение 2 → 15.0° (по умолчанию, рекомендуется)
значение 4 → 30.0° (максимальная мощность, высокий нагрев)
# Расчёт механических оборотов из eRPM:
RPM_механические = eRPM / (Motor_Poles / 2)
# Пример: мотор 14 полюсов, eRPM = 70 000
RPM = 70000 / 7 = 10 000 об/минMotors — Тестовый запуск двигателей
Интерфейс позволяет тестово запустить каждый мотор прямо из конфигуратора для проверки направления вращения и работоспособности.
Типичные ошибки настройки мотора
5. Защита, синусоидальный запуск и сервосигнал
Limits — защитные ограничения
Секция Limits защищает аккумулятор, ESC и мотор от работы за пределами допустимых электрических и тепловых параметров. Отключение защит допустимо только в диагностических целях на стенде.
| Параметр | По умолч. | Описание | Рекомендация |
|---|---|---|---|
Low Voltage Cut Off |
Вкл. | Включение защиты от глубокого разряда LiPo/Li-Ion | Всегда включать. Глубокий разряд необратимо деградирует ячейки. |
Low Voltage Cut Off Threshold |
3,3 В/ячейку | Пороговое напряжение, при котором ESC снижает мощность или останавливает мотор | LiPo: 3,3–3,5 В/ячейку. Ниже 3,0 В/ячейку — опасно. |
Temperature Limit |
80–100 °C | При превышении температуры MOSFET ESC снижает мощность для самозащиты | Устанавливать согласно datasheet конкретного ESC. Типично 80 °C. |
Current Limit |
0 (выкл.) | Максимальный ток мотора. Не все ESC имеют точный аппаратный датчик тока. | При отсутствии точного датчика — оставить выключенным во избежание ложных срабатываний. |
Sinusoidal Startup — синусоидальный запуск
В стандартном режиме ESC определяет положение ротора по Back-EMF. На очень малых оборотах Back-EMF слишком мал для надёжного определения положения ротора, что приводит к рывкам или отказу старта. Синусоидальный режим решает это: вместо ступенчатого переключения фаз ESC формирует плавную синусоидальную форму напряжения, обеспечивая стабильный крутящий момент с нуля.
| Параметр | По умолч. | Диапазон | Описание |
|---|---|---|---|
Sinusoidal Startup |
Выкл. | Вкл / Выкл | Включить для тяжёлых пропеллеров и высокой инерции ротора. Для лёгких FPV-пропеллеров — не нужен. |
Sine Mode Range |
25 | 1–50 | Диапазон оборотов синусоидального режима. Меньше → переход на трапецию раньше (ниже обороты). |
Sine Mode Power |
5 | 1–10 | Регулировать осторожно! Высокие значения сильно нагревают ESC и мотор. Начинать с минимума. |
Brake — торможение при сбросе газа
При включённом Brake on Stop ESC активно тормозит мотор при нулевом газе — подаёт тормозной ток на обмотки. При отключённом — мотор выбегает по инерции (freewheel). Для FPV-квадрокоптеров торможение критично: без него аппарат медленно реагирует на резкий сброс газа. Для крейсерских платформ можно отключить для снижения нагрева ESC.
Servo Settings — настройки сервосигнала
Servo Settings применяются только при аналоговом сигнале (PWM, Oneshot, Multishot). При работе с DShot эти настройки полностью игнорируются.| Параметр | По умолч. | Формула | Описание |
|---|---|---|---|
Low Threshold |
128 | (знач × 2) + 750 мкс |
Нижний порог PWM. 128 → 1006 мкс. Ниже порога — нулевой газ. |
High Threshold |
128 | (знач × 2) + 1750 мкс |
Верхний порог PWM. 128 → 2006 мкс. Выше порога — 100% газа. |
Neutral |
128 | 1374 + знач мкс |
Нейтраль. 128 → 1502 мкс. Центральная точка для 3D Mode. |
Dead Band |
5 | 0–100 | Мёртвая зона вокруг нейтрали. В этой зоне ESC не подаёт питание на мотор. Предотвращает дрожание при дрейфе радиосигнала. |
# Расчёт пороговых значений PWM (мкс)
Low Threshold (мкс) = (параметр × 2) + 750
High Threshold (мкс) = (параметр × 2) + 1750
Neutral (мкс) = 1374 + параметр
# Примеры при значении параметра = 128:
Low Threshold = (128 × 2) + 750 = 1006 мкс
High Threshold = (128 × 2) + 1750 = 2006 мкс
Neutral = 1374 + 128 = 1502 мксКалибровка датчиков
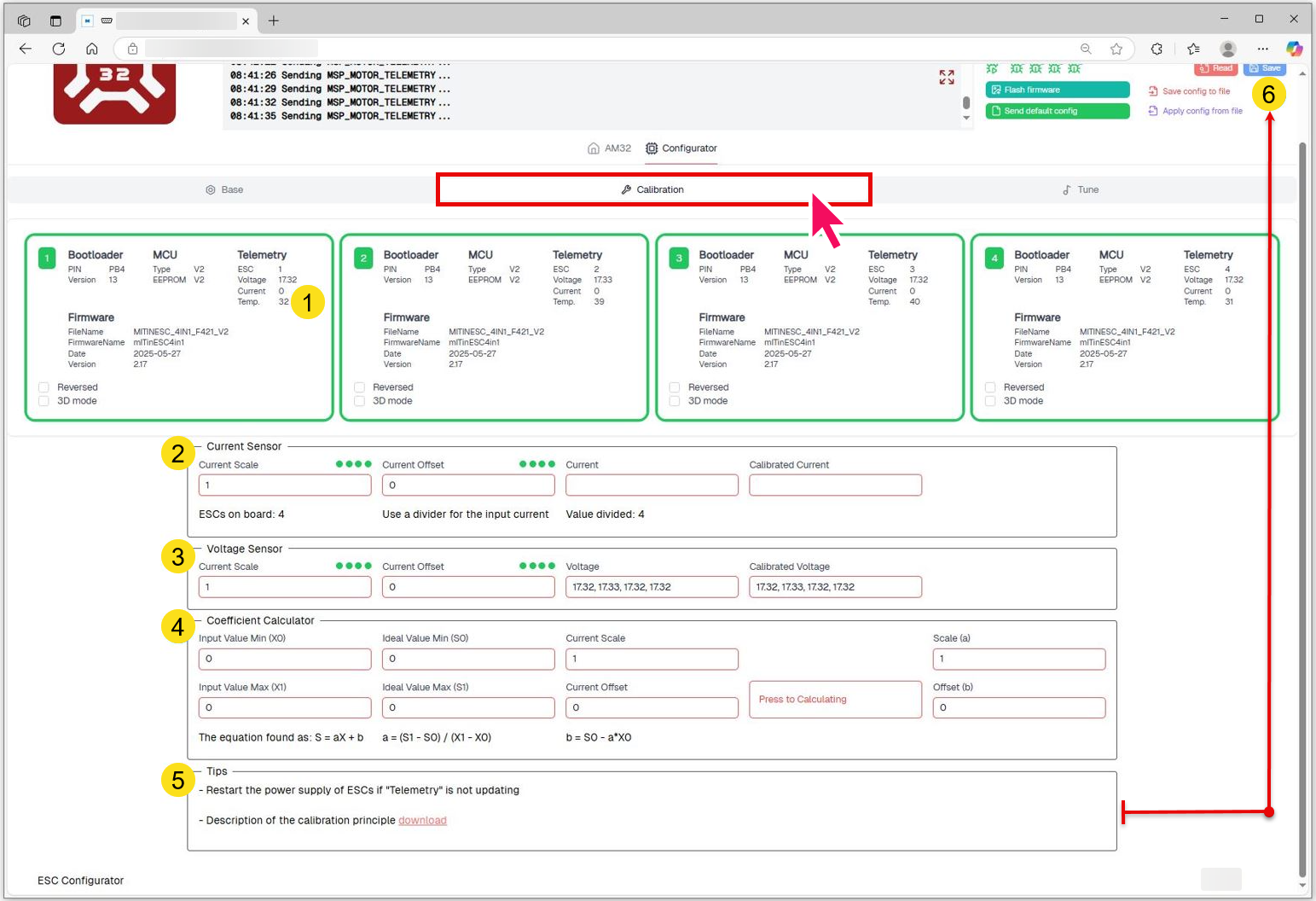
Секция Calibration содержит инструменты точной настройки датчиков тока и напряжения. Без калибровки показания телеметрии могут значительно отличаться от реальных значений.
| Инструмент | Назначение |
|---|---|
Current Sensor |
Калибровка коэффициентов шунтового резистора и усилителя тока. Компенсирует погрешность компонентов. |
Voltage Sensor |
Калибровка делителя напряжения. Эталон — мультиметр на аккумуляторе. |
Coefficient Calculator |
Встроенный калькулятор: введите эталонное значение → нажмите Calculate → Save. |
Save — зелёным. Не отключайте питание до смены цвета на зелёный.Типичные ошибки
6. Прошивка, сброс и резервное копирование
Обновление прошивки (Flash Firmware)
Обновление прошивки исправляет ошибки, добавляет новые функции и улучшает производительность. Рекомендуется проверять наличие обновлений перед каждым ответственным применением аппарата.
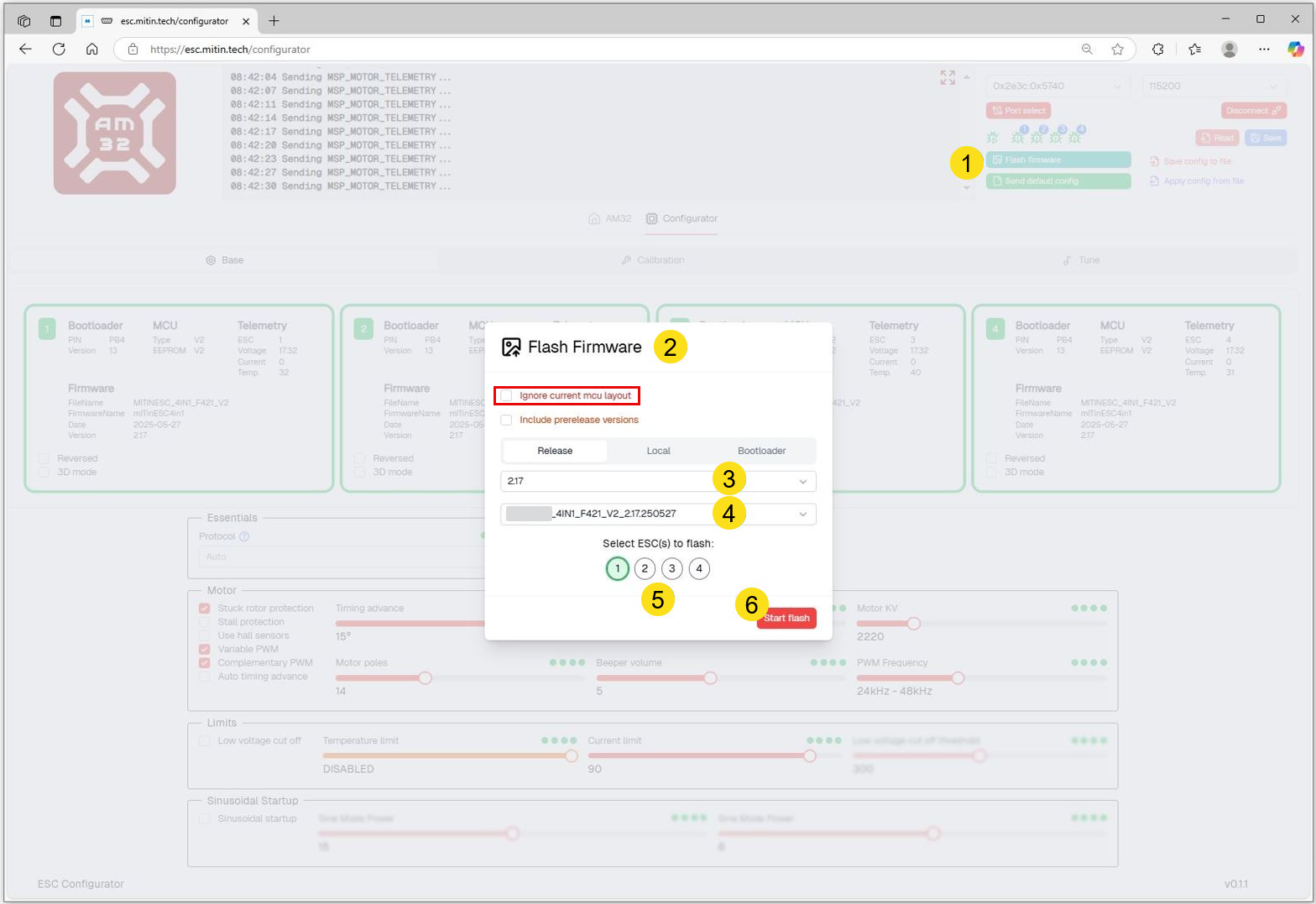
- Нажмите «Flash Firmware» — откроется окно обновления.
- Отобразится текущая версия прошивки.
- Выберите нужную версию прошивки из списка. Если ESC не определяется автоматически, можно поставить галочку «Ignore current MCU layout», найти ESC вручную и продолжить прошивку.
- Отметьте галочками те ESC, которые нужно прошить.
- Нажмите «Start Flash» для запуска.
- При необходимости можно загрузить файл прошивки с локального компьютера.
Первичная прошивка через программатор
Для установки AM32 на «чистый» ESC сначала необходимо установить загрузчик / bootloader через программатор ST-LINK, GD-LINK, CMSIS-DAP или AT-LINK. bootloaders
После установки загрузчика можно установить основную прошивку либо с помощью инструментов для настройки и полетного контроллера Betaflight (Passthrough), либо напрямую, подключив USB-адаптер с последовательным интерфейсом (one wire).
| Микроконтроллер ESC | Программатор | ПО |
|---|---|---|
STM32F051 / STM32G071 |
ST-LINK V2 | STM32CubeProgrammer |
GD32E230 |
GD-LINK | GD32 All-In-One Programmer |
AT32F415 / AT32F421 |
AT-LINK / CMSIS-DAP | AT32 ICP Programmer |
# Процедура первичной прошивки bootloader (STM32, пример)
1. Определить тип MCU по маркировке чипа на плате ESC
2. Скачать bootloader: github.com/am32-firmware/AM32 → bootloader/
3. Подключить ST-LINK к площадкам ESC: CLK, DIO, GND (3 точки)
4. Открыть STM32CubeProgrammer → выбрать ST-LINK
5. Записать .hex файл bootloader
6. Отключить программатор
7. Подключить ESC через FC → открыть конфигуратор → Flash FirmwareСброс настроек (Send Default Config)
Возвращает все параметры к заводским значениям. Обязательно выполнять при изменении версии EEPROM или при необходимости начать настройку с нуля.
| Параметр | Заводское значение | Примечание |
|---|---|---|
Complementary PWM |
Вкл. | Активное торможение |
Variable PWM |
Вкл. | Динамическая частота ШИМ |
Stuck Rotor Protection |
Вкл. | Защита от заклинивания |
Timing Advance |
2 (= 15°) | Шаг 7,5° |
PWM Frequency |
24 кГц | Частота MOSFET |
Startup Power |
100% | Мощность первых коммутаций |
Motor KV |
2200 | Усредненное значение |
Motor Poles |
14 | Полюсов ротора |
Brake on Stop |
Вкл. | Торможение при нуле газа |
Stall Protection |
Выкл. | Для краулеров — включить |
Sinusoidal Startup |
Выкл. | Для тяжёлых пропеллеров — включить |
Low Voltage Cut Off |
Вкл. | Защита батареи — не отключать |
Beep Volume |
5 | Диапазон 0–11 |
Сохранение и загрузка конфигурации
# Сохранение конфигурации (Save config to file)
1. Убедиться: настройки считаны (Read выполнен)
2. Нажать Save config to file
3. Выбрать ESC → Download
4. Файл сохраняется в формате JSON
5. Рекомендуемое имя: drone_<имя>_<дата>.json
Пример: race_quad_v2_2025-06-14.json
# Загрузка конфигурации (Apply config from file)
1. Нажать Apply config from file
2. Выбрать файл .json
3. Проверить совместимость версий EEPROM
4. Отметить целевые ESC → Apply
5. Нажать Save для записи в EEPROMТипичные ошибки
Save config to file до начала обновления.7. Практика: типовые задачи (с решениями)
Диагностика и первичная настройка
Задача 1: Определение параметров мотора по маркировке
Мотор имеет маркировку 2306 2450KV и 14 магнитов на роторе. Определите, какие значения ввести в конфигураторе AM32.
# Исходные данные:
Маркировка: 2306 2450KV, магниты: 14 штук
# Решение:
# В современном интерфейсе конфигуратора вводим значения напрямую:
Motor KV = 2450
Motor Poles = 14
# Проверка максимальных оборотов (теоретически, без нагрузки):
# Батарея 4S = 4 × 3,7 В = 14,8 В (номинал)
# RPM_max = KV × V = 2450 × 14,8 = 36 260 об/мин
# Ответ:
Motor KV = 2450
Motor Poles = 14Задача 2: Расчёт порогов сервосигнала
Передатчик выдаёт сигнал 1020–1980 мкс. Рассчитайте значения Low Threshold и High Threshold для конфигуратора.
# Формулы:
Low Threshold (мкс) = (параметр × 2) + 750
High Threshold (мкс) = (параметр × 2) + 1750
# Обратный расчёт (из мкс → параметр):
параметр_low = (мкс_low - 750) / 2
параметр_high = (мкс_high - 1750) / 2
# Решение для 1020–1980 мкс:
параметр_low = (1020 - 750) / 2 = 270 / 2 = 135
параметр_high = (1980 - 1750) / 2 = 230 / 2 = 115
# Ответ:
Low Threshold = 135 (→ 1020 мкс)
High Threshold = 115 (→ 1980 мкс)Задача 3: Диагностика — телеметрия не обновляется
После нажатия Read все параметры считались успешно, но поля телеметрии (напряжение, ток, температура) показывают нули и не обновляются. Определите причину и последовательность действий.
# Диагноз: канал телеметрии не инициализировался при старте
# Причина: телеметрия инициализируется только при подаче питания.
# Если питание было подано до установления соединения —
# канал может не активироваться корректно.
# Последовательность устранения:
1. НЕ отключать USB (оставить соединение с FC активным)
2. Отключить аккумулятор от аппарата
3. Подождать 3–5 секунд (ESC полностью обесточивается)
4. Подключить аккумулятор снова
5. В конфигураторе нажать Read
6. Проверить обновление телеметрии
# Если не помогло:
7. Проверить, подключён ли телеметрийный провод ESC к FC
8. Убедиться, что в Betaflight включена функция ESC Telemetry
(Configuration → ESC/Motor Features → ESC Telemetry)Продвинутые сценарии
Задача 4: Подбор настроек для крупного БПЛА с тяжёлыми пропеллерами
БПЛА с моторами 4114 400KV, 6S батарея, пропеллеры 15 дюймов, 12 полюсов. Мотор при стандартных настройках иногда не запускается с первой попытки (рывок, затем остановка). Предложите конфигурацию ESC.
# Исходные данные:
Motor: 4114 400KV, Poles: 12, Props: 15", Battery: 6S
# Проблема: стандартный трапециевидный старт не справляется
# с высокой инерцией тяжёлого пропеллера
# Рекомендуемая конфигурация:
Motor KV = 400 (вводим реальное значение)
Motor Poles = 12
Sinusoidal Startup = Вкл.
Sine Mode Range = 30 (долгий синусоидальный режим)
Sine Mode Power = 4 (начать с 4, не выше 5)
Startup Power = 110% (чуть выше нормы для тяжёлой нагрузки)
Timing Advance = 2 (15°) → при стабильной работе можно снизить до 1 (7.5°)
Temperature Limit = 80°C (жёсткий контроль нагрева)
Variable PWM = Вкл.
Complementary PWM = Вкл.
PWM Frequency = 16 кГц (снижение нагрева MOSFET)
# Алгоритм проверки:
# 1. Установить конфигурацию → Save
# 2. Запустить мотор от 0 до 10% газа медленно
# 3. Контролировать температуру ESC через телеметрию
# 4. При перегреве → снизить Sine Mode Power на 1
# 5. При рывке при старте → увеличить Sine Mode Power на 1Задача 5: Восстановление ESC после неудачной прошивки
Во время обновления прошивки питание было кратковременно прервано. ESC больше не определяется конфигуратором через Passthrough. Опишите последовательность восстановления.
# Ситуация: частично перезаписанная прошивка, ESC не загружается
# Диагностика:
# Bootloader обычно выживает при прерывании (он в защищённой области).
# Если bootloader цел → ESC может войти в режим ожидания прошивки.
# Шаг 1: Попробовать восстановление через конфигуратор
1. Открыть Flash Firmware
2. Установить галочку "Ignore current MCU layout"
3. Вручную выбрать модель ESC из списка
4. Нажать Start Flash → иногда ESC в режиме bootloader ещё отвечает
# Шаг 2: Если конфигуратор не помогает → программатор
1. Определить тип MCU (STM32/GD32/AT32)
2. Подключить программатор к площадкам CLK, DIO, GND
3. Прочитать текущее содержимое flash (проверить состояние)
4. Если bootloader цел → записать только основную прошивку AM32
5. Если bootloader повреждён → записать bootloader, затем прошивку
# Шаг 3: После восстановления
1. Подключить ESC через конфигуратор
2. Выполнить Send Default Config
3. Настроить параметры (или загрузить из резервной копии)8. Чек‑лист самопроверки знаний
Отметьте пункты, которые вы действительно понимаете и можете применить без подсказок. Рекомендуется заполнять после первой самостоятельной настройки реального аппарата.
| ✓ | Навык / Знание | Проверка |
|---|---|---|
| Знаю разницу между аналоговым PWM и цифровым DShot | Могу объяснить, почему DShot не требует калибровки, и описать структуру пакета | |
| Умею подключить ESC к ПК через Passthrough | Могу выбрать COM-порт, нажать Connect и получить Read без ошибок | |
| Понимаю назначение Timing Advance | Могу объяснить, что произойдёт при значении 1 и при значении 7, и рассчитать угол в градусах | |
| Правильно устанавливаю Motor KV и Motor Poles | Могу найти параметры на моторе и ввести их в конфигуратор без ошибок | |
| Знаю, зачем нужен Complementary PWM | Могу объяснить разницу между freewheel и active braking и их влияние на управление | |
| Понимаю защиты Low Voltage Cut Off и Temperature Limit | Могу объяснить, что происходит с LiPo при разряде ниже 3,0 В/ячейку | |
| Знаю, когда и зачем использовать Sinusoidal Startup | Могу объяснить, почему на малых оборотах Back-EMF недостаточен, и настроить режим для тяжёлых пропеллеров | |
| Умею обновлять прошивку ESC | Могу провести полный цикл: сохранить конфиг → Flash → Default Config → восстановить конфиг | |
| Умею восстанавливать ESC через программатор | Знаю, какой программатор нужен для STM32 / GD32 / AT32 и как записать bootloader | |
| Умею создавать и восстанавливать резервные копии конфигурации | Могу сохранить .json, назвать файл с датой и моделью, загрузить на другой ESC с проверкой совместимости | |
| Знаю 3D Mode и Reverse Rotation и их различие | Могу объяснить, когда применять 3D Mode, и чем он отличается от простого реверса | |
| Умею читать телеметрию ESC и диагностировать по ней проблемы | Могу по показаниям температуры, тока и eRPM определить, нормально ли работает мотор |
- Среда, 24 июня 2026