 | INAV")
Вкладка Калибровка (Calibration Tab) | INAV
Современные датчики акселерометров точны, но требуют калибровки для получения точных измерений.
Датчики на вашем полетном контроллере (FC) могут иметь смещения и разные коэффициенты усиления по осям. INAV использует продвинутую 6-точечную калибровку для компенсации всех возможных несоответствий.
Шаги калибровки акселерометра
В отличие от простой калибровки уровня в betaflight, INAV использует процесс "6-точечной калибровки акселерометра".
Процедура калибровки:
- Подключите модель к ПО "Configurator", откройте вкладку "Настройка (Status)"
- Установите модель горизонтально (позиция 1 на схеме) и нажмите "Calibrate Accelerometer"
- Последовательно разместите модель во всех положениях (2-6): на спине, правом боку, носом вверх, левом боку, носом вниз
- Нажимайте "Calibrate Accelerometer" в каждом положении
- После записи 6 точек система рассчитает смещения и коэффициенты, сохранив их в EEPROM контроллера
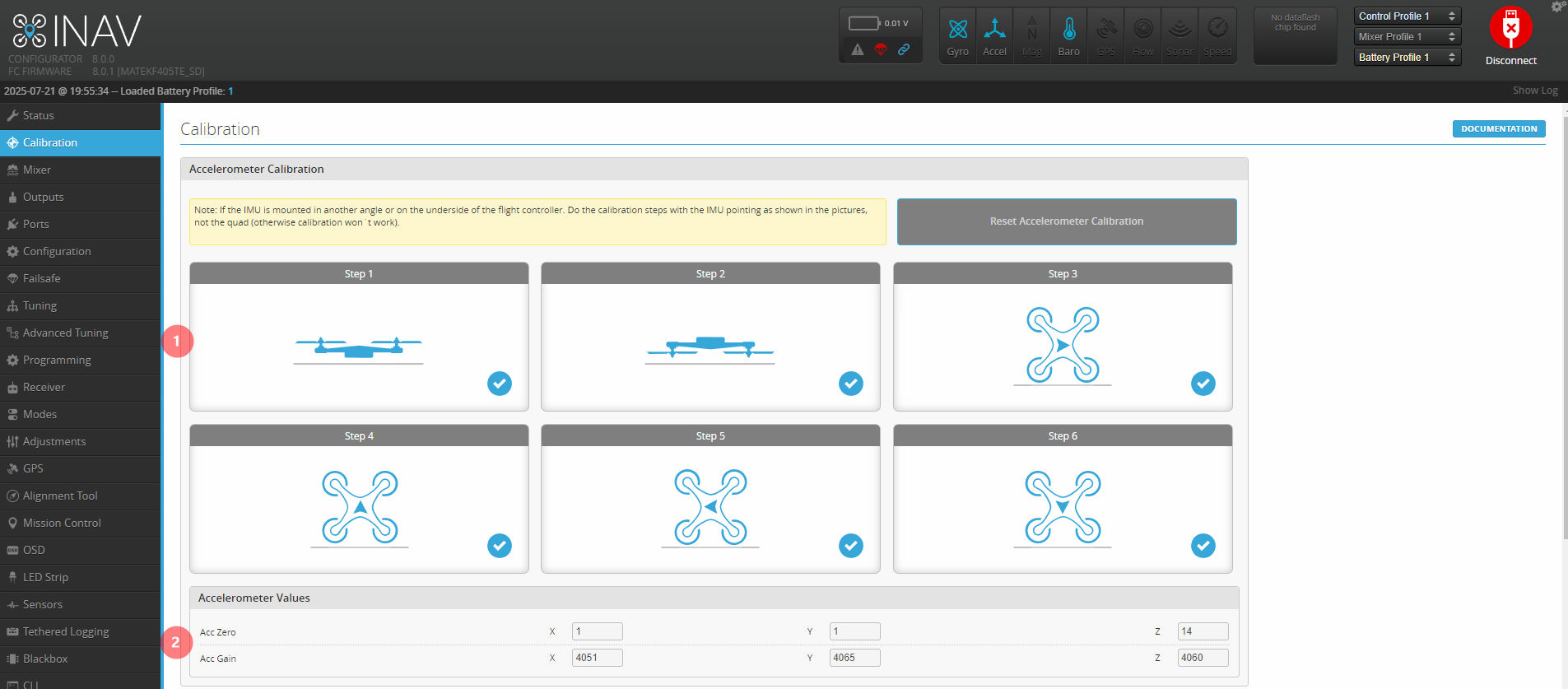
4096, а acczero_x, acczero_y, acczero_z изменились. Если значения остались прежними — калибровка не удалась.Ориентация платы и калибровка уровня
Если плата повернута, отрегулируйте ориентацию во вкладке Alighnment Tool.
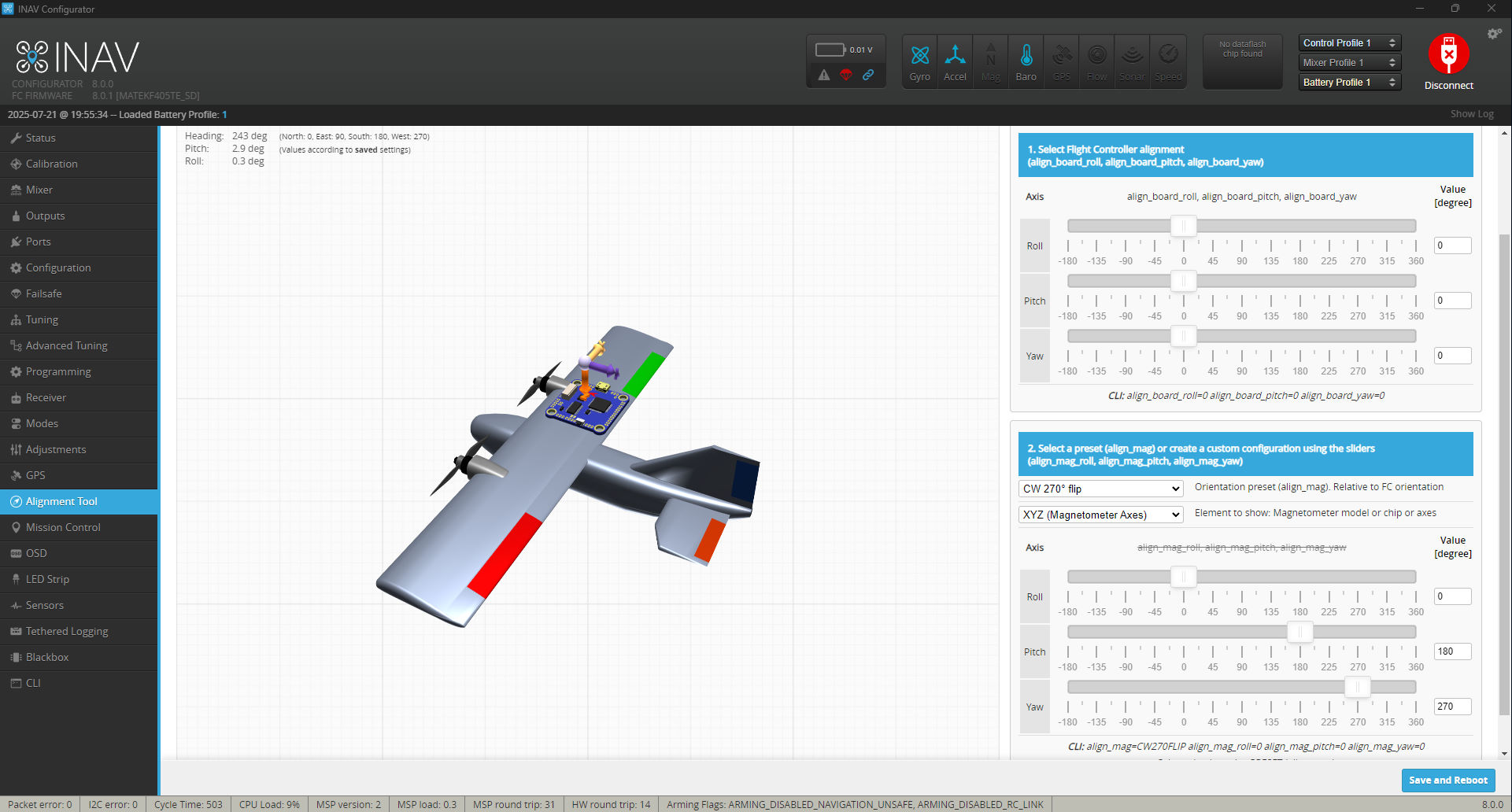
Вернитесь во вкладку Calibration и проверьте ориентацию, наклоняя модель — 3D-изображение в конфигураторе должно соответствовать реальным движениям.
Калибровка акселерометра определяет ориентацию чипа, но не гарантирует, что модель дрона также правильно ориентирована. Для корректной работы навигации используйте Alighnment Tool, где показания должны быть близки к 0.0 при горизонтальном положении. Выровняйте модель и отрегулируйте показатели Pitch, Roll, Yaw.
CLI: Углы ориентации платы задаются в градусах×10 (например, 1.5° = 15).
Калибровка компаса
Точная настройка компаса жизненно важна — это основной источник информации о курсе. Неточный курс приведет к ошибкам в авторежимах (POSHOLD, RTH, Waypoint) или потерю контроля.
- Установите его на мачте с GPS
- Задайте правильное align_mag (выровняйте компас)
- Физически отключите внутренний магнитометр, если используются одинаковые чипы
Процедура калибровки:
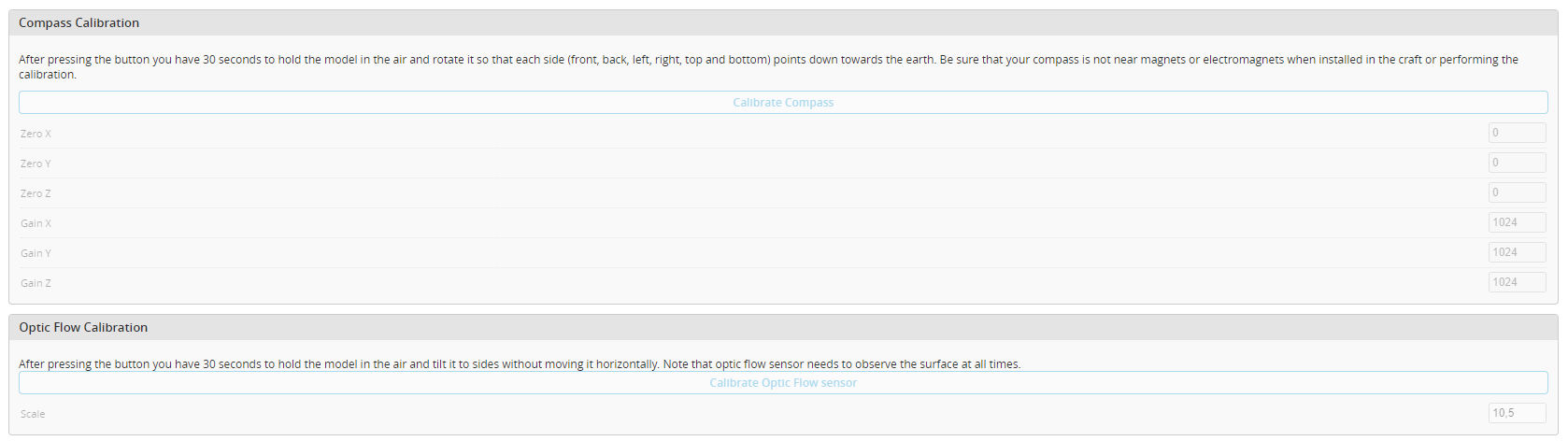
- Подайте питание от полетного аккумулятора
- Нажмите "Calibrate Compass"
- В течение 30 секунд вращайте модель, чтобы все стороны (перед, зад, лево, право, верх, низ) были направлены к земле
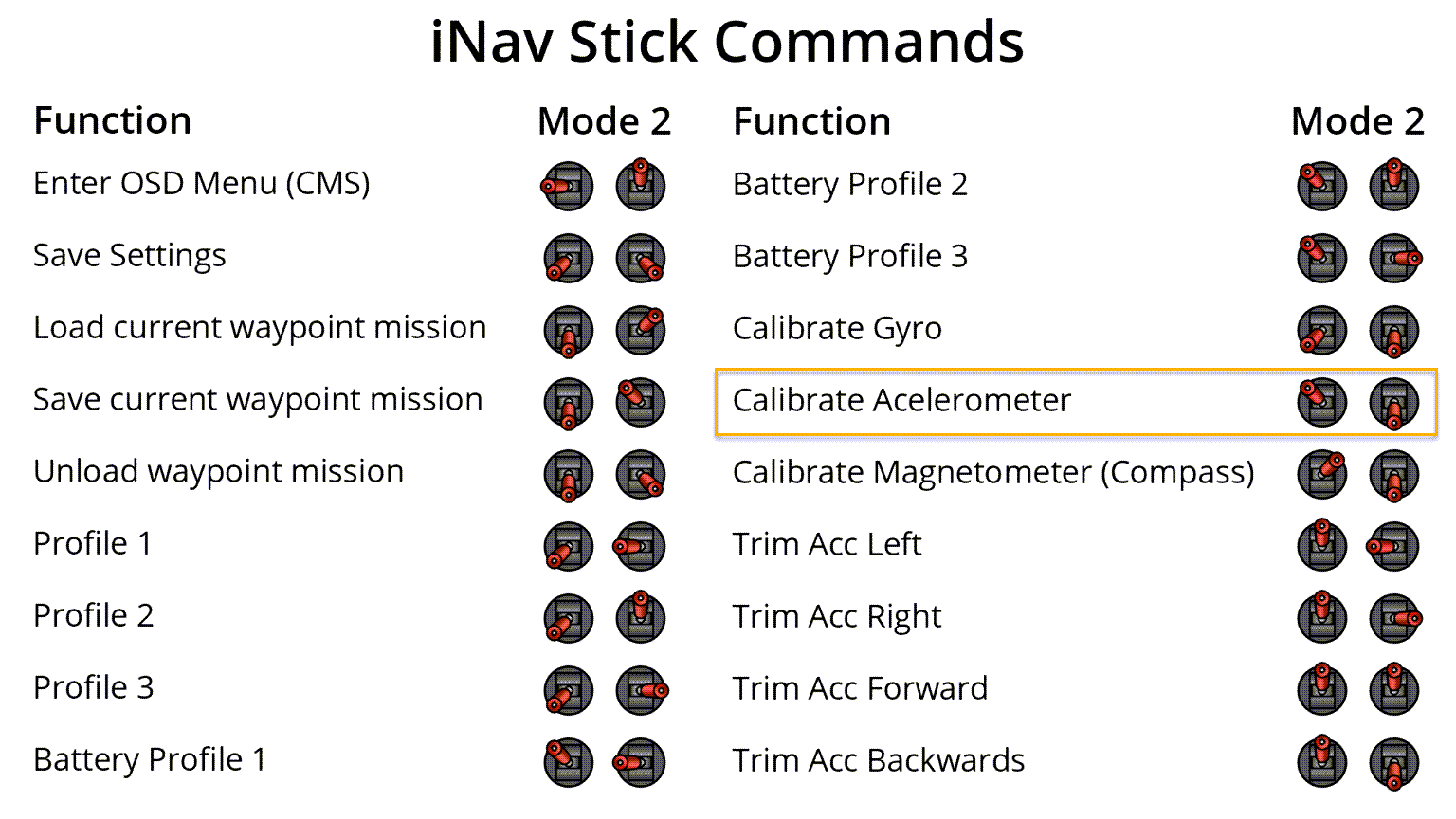
Калибровка без компьютера (стиками):
Для калибровки акселерометра. Переведите левый стик вверх-вправо, правый — вниз-в центр. Два коротких звуковых сигнала подтвердят начало калибровки. Вращайте модель 30 секунд до одиночного сигнала завершения.
Проверка калибровки:
- Через CLI убедитесь, что magzero_x, magzero_y, magzero_z изменились
- Направьте модель на Север — курс должен быть 0°
- Наклоняйте модель на 30° во всех направлениях — курс не должен меняться более чем на несколько градусов
- Повторите проверку для направлений: Восток (90°), Юг (180°), Запад (270°)
В INAV 1.2+ используйте
set inav_auto_mag_decl = ON.Калибровка гироскопа
Калибровка смещений гироскопа выполняется при каждом включении. Модель должна быть неподвижна при подаче питания. Обеспечьте неподвижность в течение 5 секунд после включения.
Резервное копирование и восстановление настроек
Для сохранения параметров калибровки используйте CLI-переменные:
- Акселерометр: acczero_x, acczero_y, acczero_z, accgain_x, accgain_y, accgain_z
- Компас: magzero_x, magzero_y, magzero_z
ID 360