 | INAV")
Вкладка Mixer (Микшер) | INAV
Вкладка «Mixer» позволяет настроить параметры, определяющие, как INAV интерпретирует движения стиков пульта управления и преобразует их в скорость вращения моторов или перемещение рулевых поверхностей вашего летательного аппарата.
Примеры:
- Мультиротор: когда вы отклоняете стик тангажа (элеватора) назад, передние два мотора увеличивают обороты, а задние два — уменьшают.
- Летающее крыло: отклонение стика тангажа назад приводит к подъёму обоих элевонов.
Благодаря этому INAV поддерживает огромное разнообразие конфигураций моторов и рулевых поверхностей.
Важное предупреждение
Не используйте микширование на вашем радиопередатчике.
INAV предназначен для управления летательным аппаратом в частичных или полных навигационных режимах. Современные радио имеют возможность настройки кастомных схем (например, для дельта-крыльев, V-образного хвоста и т.д.).
Однако это — микширование, выполняемое на стороне радио. Если использовать такие настройки вместе с INAV, это может казаться рабочим в ручном режиме при тестировании, но INAV не сможет корректно интерпретировать эти миксы.
В результате, при переходе в другой режим (например, стабилизированный) или при срабатывании аварийного режима (failsafe), самолёт может выйти из-под контроля.
Отключите все кастомные настройки на радио.
Триммеры, экспоненты (expos) и миксы настраивайте в INAV.
Это крайне важно!
Начальная настройка со значениями по умолчанию
После прошивки контроллера полёта (FC) прошивкой INAV вы увидите экран «Значения по умолчанию» (Default Values), где нужно выбрать предустановку, наиболее подходящую под ваш тип летательного аппарата.
Частью этих значений по умолчанию является предустановка микшера (mixer preset), которая автоматически заполняет вкладку «Mixer» соответствующими параметрами.
назначение выходов для моторов и сервоприводов
INAV поддерживает функцию, позволяющую гибко назначать функции на PWM-выходы непосредственно через INAV Configurator.
Для каждой группы таймеров (Timer Group) можно назначить одну из функций:
- AUTO — автоматическое определение,
- MOTORS — моторы,
- SERVOS — сервоприводы.
После этого все выходы в этой группе будут выполнять указанную функцию.
Примечание: В отличие от Betaflight, INAV не использует переназначение ресурсов (resource remapping). Вместо этого вы изменяете порядок моторов в микшере.
Важно помнить:
- В редких случаях назначение выходов может отличаться от INAV версии 6.
- Это делает ещё более важными снятие пропеллеров и двойную проверку работы выходов, прежде чем впервые подавать питание от аккумулятора после применения старых настроек или активации выходов.
Невозможно назначить функцию отдельно на каждый выход.
Это ограничение аппаратное, а не программное.
Предустановки микшера (Mixer Presets)
Здесь вы указываете INAV, каким типом дрона он будет управлять. Контроллер полёта выполнит микширование за вас.
Просто выберите нужный тип из выпадающего меню и нажмите «Save and Reboot» (Сохранить и перезагрузить).
Большая часть настроек будет выполнена автоматически.
Обычно вам не нужно ничего менять вручную, так как настройки должны быть уже применены через «Default Values». Однако рекомендуется всё же проверить.
Если вы хотите использовать обратное вращение моторов (props-out):
Выберите: «Reversed motor direction / Props-out configuration»
(Обратное направление вращения / Конфигурация с внешними пропеллерами)
Не забудьте нажать «Save and Reboot».
Расширенные возможности
Существует несколько продвинутых сценариев использования микшера:
- Документация по микшеру — подробное описание всех компонентов микшера.
- Профили микшера (Mixer Profiles) — позволяют задать более одного микса и переключаться между ними во время полёта. Часто используется в VTOL.
- Кастомные миксы для экзотических конфигураций — базовая точка входа для редких схем, например, шестиосный квадрокоптер Y6.
![]()
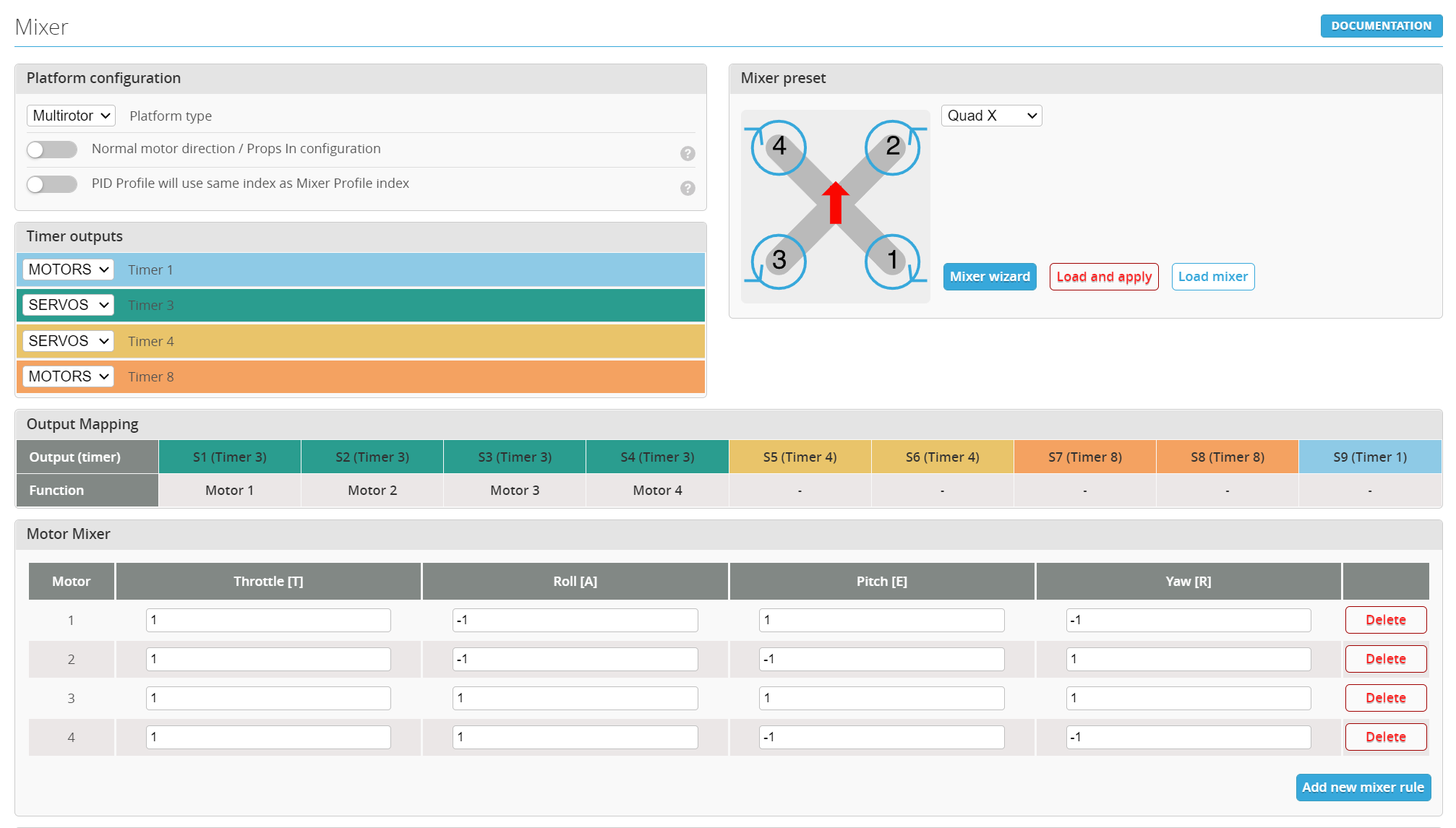
Mixer (разбор параметров)
Mixer (Микшер) — это один из самых важных разделов в настройке полетного контроллера. Он отвечает за преобразование команд от пилота (например, "больше газа", "повернуть направо") в конкретные сигналы, которые отправляются на моторы и сервоприводы. Микшер определяет, как летательный аппарат сконфигурирован (квадрокоптер, самолет и т.д.) и как его компоненты взаимодействуют друг с другом.
Platform configuration
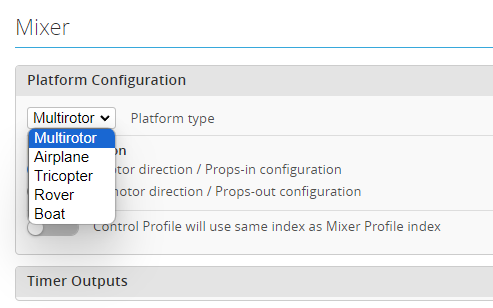
Возможные конфигурации для выбранной платформы выше можно определить в Mixer preset:
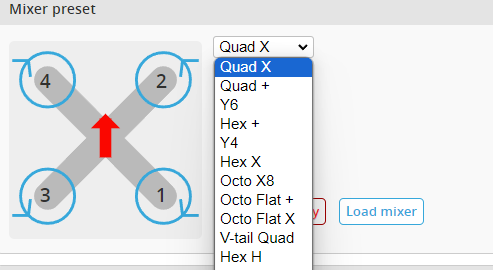
- Quadcopter (Квадрокоптер): Стандартные схемы: "X", "+", "H".
- Hexacopter (Гексакоптер): 6 моторов, схемы: "X6", "+6".
- Octocopter (Октокоптер): 8 моторов.
- Tricopter (Трикоптер): 3 мотора + 1 сервопривод для наклона хвостовой балки.
- Y4, Y6: Конфигурации с соосными моторами.
- Airplane (Самолет): Для фиксированной тяги, с сервоприводами для элеронов, руля высоты и т.д.
- Custom (Пользовательская): Позволяет вручную настроить микшер для нестандартных конфигураций.
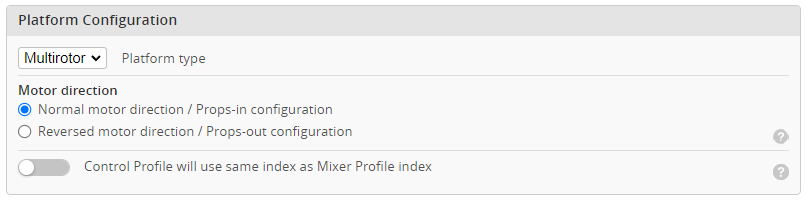
Определяет направление вращения моторов и ориентацию пропеллеров
Эта настройка определяет две связанные концепции:
- Motor Direction (Направление вращения моторов): Определяет, вращаются ли моторы по "стандартной" схеме (например, все наружу от центра) или по реверсивной.
- Prop Direction (Ориентация пропеллеров): Определяет, установлены ли пропеллеры для создания тяги вверх при стандартном (Normal) или реверсивном (Reversed) направлении вращения.
Цель: Обеспечить правильную балансировку момента вращения дрона. Если эта настройка неверна, дрон будет неконтролируемо вращаться (переворачиваться) при взлете.
Изменить направление вращения моторов можно нажав на кнопку MOTOR MIXER WIZARD
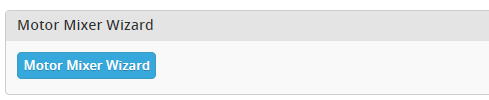
.. и затем выбрав необходимое вращение каждого двигателя во вслывающем окне
Timer outputs
Этот раздел показывает, на какие физические выводы (пины) полетного контроллера подключены моторы и сервоприводы.
- MOTORS ▼ (Timer 1, Timer 8): Показывает, что моторы подключены к выходам, управляемым от Таймера 1 и Таймера 8. Таймеры в микроконтроллере генерируют ШИМ-сигнал (PWM), необходимый для управления ESC (регуляторами оборотов моторов) и сервоприводами.
- SERVOS ▼ (Timer 3, Timer 4): Показывает, что сервоприводы подключены к выходам, управляемым от Таймера 3 и Таймера 4.
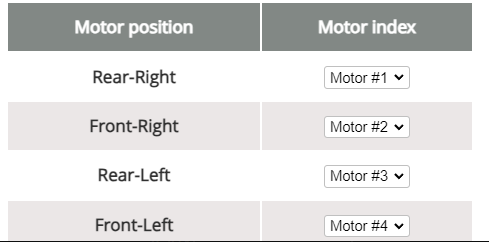
Output Mapping

Эта таблица напрямую связывает физические выходы на плате (Output) с их функциями (Function) в логике полетного контроллера.
Столбцы:
- Output (timer): Физический выходной сигнал и его таймер. Например,
S1 (Timer 3)— это первый выход (Signal 1) на Таймере 3. - Function (Функция): Назначение этого выхода. Что к нему подключено — мотор, сервопривод, или он не используется.
|
Текущая конфигурация (из скриншота выше):
Вывод: Сконфигурирован простой квадрокоптер, где все 4 мотора подключены к выходам на Таймере 3. Остальные выходы свободны. |
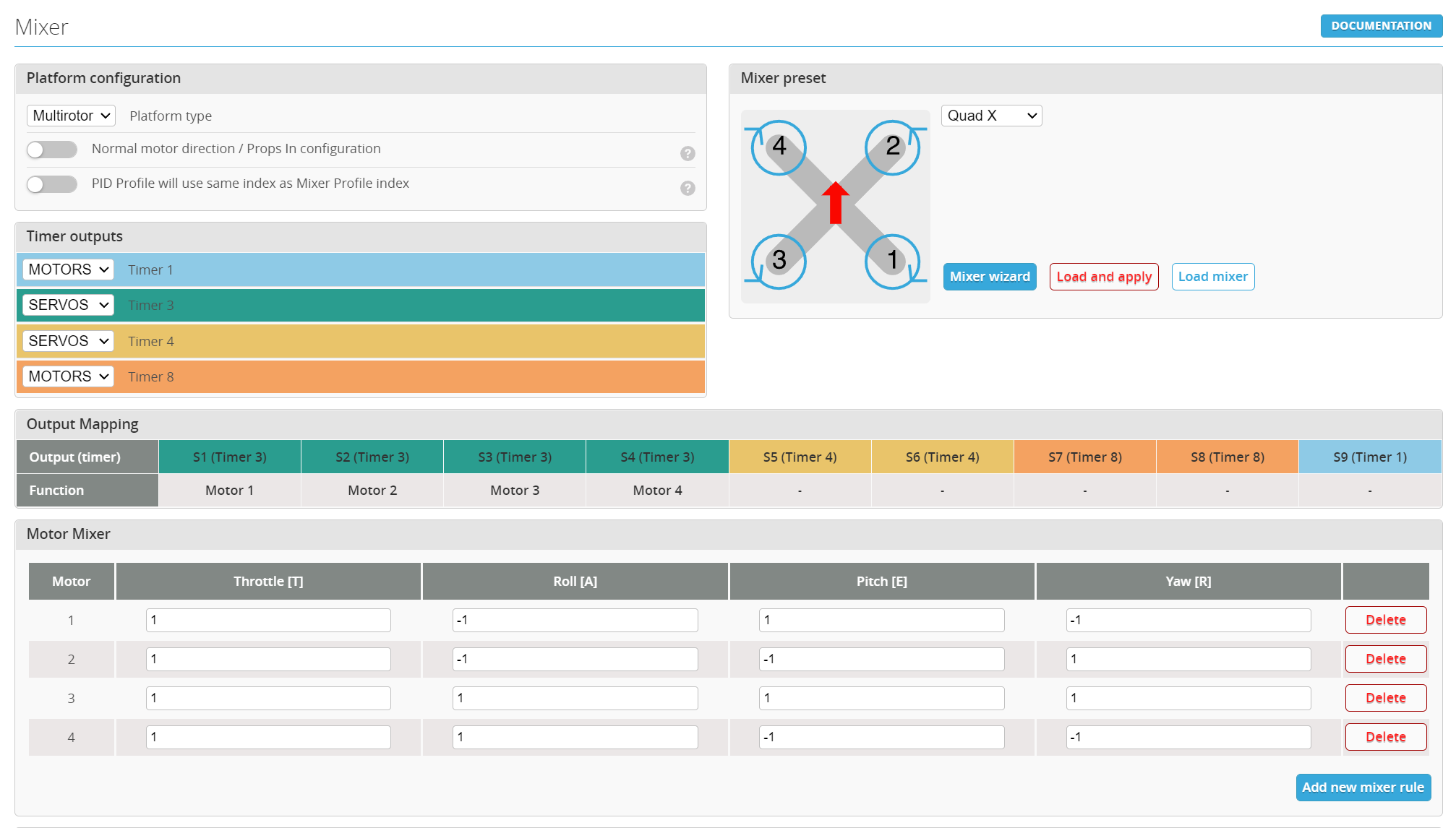
Motor Mixer

Пояснение: Motor Mixer (Моторный микшер)
Как это работает на примере Квадрокоптера X4:
- Motor 1 (передний правый):
T=1.000, A=-1.000, B=1.000, R=-1.000 - Motor 2 (задний левый):
T=1.000, A=-1.000, B=-1.000, R=1.000 - Motor 3 (передний левый):
T=1.000, A=1.000, B=1.000, R=1.000 - Motor 4 (задний правый):
T=1.000, A=1.000, B=-1.000, R=-1.000
Примечание
Это коэффициенты, которые определяют, как каждый мотор должен реагировать на команды от пилота и полётного контроллера.
Буквенные обозначения:
- T (Throttle) - Газ
- R (Roll) - Крен (наклон влево/вправо)
- E (Pitch) - Тангаж (наклон вперед/назад)
- Y (Yaw) - Рыскание (поворот вокруг своей оси)
Цифры и знаки:
- 1.000 - Мотор вращается "вперед" (по направлению увеличения тяги/оборотов) на 100% от полученной команды.
- -1.000 - Мотор вращается "назад" на 100% от полученной команды (или уменьшает тягу для создания момента).
- 0.000 - Мотор не реагирует на эту команду.
Подробное объяснение для каждого мотора:
Мотор 1 (Передний-правый)
T: 1.000- Увеличивает тягу при добавлении газа.R: -1.000- УМЕНЬШАЕТ тягу при команде наклона ВПРАВО (чтобы опустить правую сторону).E: 1.000- УВЕЛИЧИВАЕТ тягу при команде наклона ВПЕРЕД (чтобы опустить нос).Y: -1.000- УМЕНЬШАЕТ тягу для создания момента ПОВОРОТА ПРОТИВ ЧАСОВОЙ стрелки.
Мотор 2 (Задний-левый)
T: 1.000- Увеличивает тягу при добавлении газа.R: -1.000- УМЕНЬШАЕТ тягу при команде наклона ВПРАВО (чтобы поднять левую сторону).E: -1.000- УМЕНЬШАЕТ тягу при команде наклона ВПЕРЕД (чтобы поднять нос).Y: 1.000- УВЕЛИЧИВАЕТ тягу для создания момента ПОВОРОТА ПРОТИВ ЧАСОВОЙ стрелки.
Мотор 3 (Передний-левый)
T: 1.000- Увеличивает тягу при добавлении газа.R: 1.000- УВЕЛИЧИВАЕТ тягу при команде наклона ВПРАВО (чтобы поднять правую сторону).E: 1.000- УВЕЛИЧИВАЕТ тягу при команде наклона ВПЕРЕД (чтобы опустить нос).Y: 1.000- УВЕЛИЧИВАЕТ тягу для создания момента ПОВОРОТА ПО ЧАСОВОЙ стрелки.
Мотор 4 (Задний-правый)
T: 1.000- Увеличивает тягу при добавлении газа.R: 1.000- УВЕЛИЧИВАЕТ тягу при команде наклона ВПРАВО (чтобы опустить левую сторону).E: -1.000- УМЕНЬШАЕТ тягу при команде наклона ВПЕРЕД (чтобы поднять нос).Y: -1.000- УМЕНЬШАЕТ тягу для создания момента ПОВОРОТА ПО ЧАСОВОЙ стрелки.
Как это работает на практике:
-
Газ (Throttle): Все моторы
1.000. При увеличении газа все 4 мотора одинаково увеличивают тягу, и дрон взлетает. -
Наклон ВПРАВО (Roll Right):
- Моторы на правой стороне (1 и 4) должны уменьшить тягу, чтобы правая сторона опустилась.
- Моторы на левой стороне (2 и 3) должны увеличить тягу, чтобы левая сторона поднялась.
- Смотрим на столбец
R: у моторов 1 и 2 стоит-1.000(уменьшают тягу), а у моторов 3 и 4 стоит1.000(увеличивают тягу). Именно это и происходит.
-
Наклон ВПЕРЕД (Pitch Forward):
- Передние моторы (1 и 3) должны увеличить тягу, чтобы нос опустился.
- Задние моторы (2 и 4) должны уменьшить тягу, чтобы корма поднялась.
- Смотрим на столбец
E: у моторов 1 и 3 стоит1.000, а у моторов 2 и 4 стоит-1.000.
-
Поворот ПО ЧАСОВОЙ стрелке (Yaw CW):
- Чтобы повернуться, дрон использует разницу в противокрутящем моменте.
- Моторы, вращающиеся в одну сторону (например, 1 и 4 по часовой), уменьшают тягу.
- Моторы, вращающиеся в другую сторону (2 и 3 против часовой), увеличивают тягу.
- Это создает дисбаланс, и дрон поворачивается. Смотрим на столбец
Y: для поворота по часовой моторы 1 и 4 (-1.000) уменьшают тягу, а моторы 2 и 3 (1.000) увеличивают.
Эта матрица гарантирует, что все движения дрона будут согласованными и предсказуемыми.
Элементы управления:
- Кнопка "Delete" (Удалить): Позволяет удалить правило смешивания для конкретного мотора (используется в пользовательских конфигурациях).
- Кнопка "Add new mixer rule" (Добавить новое правило микшера): Позволяет вручную добавить правило для дополнительного мотора или сервопривода в нестандартных конфигурациях (например, для самолета с несколькими сервоприводами на крыле).
Итог
На скриншоте представлена стандартная конфигурация для квадрокоптера (схемы "X"). Все 4 мотора подключены к одному таймеру (Timer 3), а микшер настроен таким образом, чтобы преобразовывать команды по крену, тангажу и рысканию в правильные изменения тяги для каждого из моторов, обеспечивая стабильный полет.
![]()
Пояснение Control Profile
Control Profile will use same index as Mixer Profile index - это важная особенность системы профилей в iNav. Давайте разберем подробно:
Что это означает:
В iNav существует два типа профилей:
- Mixer Profile - профиль микшера (настройки двигателей, распределение каналов)
- Control Profile - профиль управления (PID-настройки, фильтры, rates)
Данная настройка означает, что эти профили связаны по индексу.
Как это работает:
| Mixer Profile Index | Control Profile Index |
|---|---|
| 1 | → 1 |
| 2 | → 2 |
| 3 | → 3 |
Пример:
-
Если вы переключаетесь на Mixer Profile 2, то автоматически активируется Control Profile 2
-
Если выбираете Mixer Profile 3, то включается Control Profile 3
Практическое применение:
Для чего это нужно:
- Разные конфигурации дрона - если у вас дрон может менять конфигурацию (например, квадрокоптер и самолет)
- Разные настройки для разных целей - гоночные настройки vs кинематографические настройки
- Резервные настройки - основной профиль и запасной на случай проблем
Пример использования:text
Mixer Profile 1 + Control Profile 1: - Quad X конфигурация - Агрессивные PID - Высокие rates для фристайла Mixer Profile 2 + Control Profile 2: - Тот же Quad X - Сглаженные PID - Низкие rates для плавной съемки
Важные особенности:
✅ Преимущества:
- Автоматическое переключение всех настроек
- Синхронизация конфигураций
- Упрощение управления разными режимами
⚠️ Что учитывать:
- Изменения в микшере повлияют на активный профиль управления
- При создании нового микшер-профиля нужно настраивать соответствующий control-профиль
- Не подходит, если нужно независимое переключение PID и микшера
Настройка в iNav:
- Обычно находится в разделе Mixer или Configuration
- Можно отключить эту связь, если нужна независимая работа профилей
- По умолчанию включена для удобства
Вывод: Эта функция удобна для быстрого переключения между полными наборами настроек, когда меняется конфигурация или назначение дрона.
ID 614