![Вкладка Моторы в Betaflight [Motors Tab]](https://technobee.ru/media/zoo/images/line100_COLOR_95f91e4e65caffb3167b26d8cecae397.png "Вкладка Моторы в Betaflight [Motors Tab]")
Вкладка Моторы в Betaflight [Motors Tab]
Содержание
Вкладка «Motors» (Моторы)
Эта вкладка предназначена для настройки параметров моторов и электронных регуляторов скорости (ESC). Здесь можно изменить направление вращения моторов, настроить конфигурацию расположения моторов (миксер), а также активировать расширенные функции телеметрии и полёта.
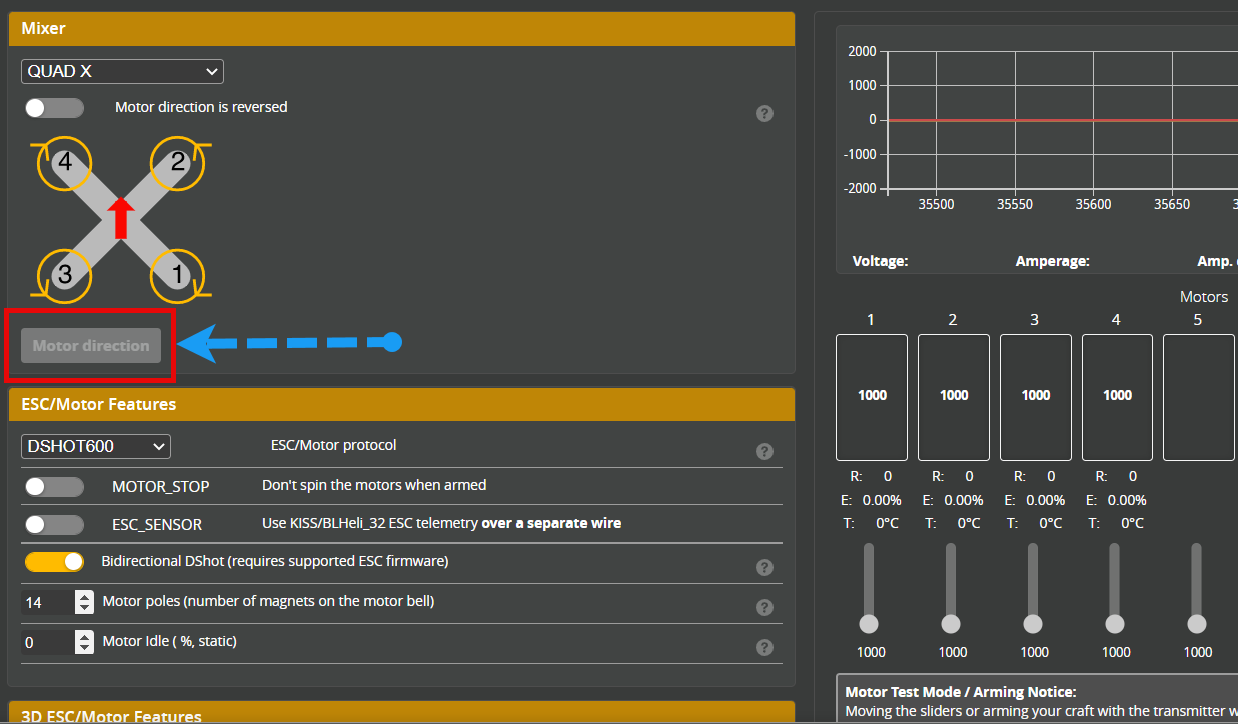
Микшер (Mixer)
Назначение
Настройка конфигурации расположения моторов и определение того, как полётный контроллер (FC) будет управлять моторами для поддержания стабильного полёта.
Рекомендация
Для стандартных квадрокоптеров рекомендуется использовать конфигурацию «QUAD X». Если вы не уверены в правильности выбора, установите именно этот вариант.
Направление вращения моторов
- По умолчанию («props in»): Пропеллеры вращаются навстречу друг другу, то есть внутрь, если смотреть на переднюю часть квадрокоптера (в сторону камеры).
- Обратное направление («props out»): Пропеллеры вращаются от центра, то есть наружу, в сторону от камеры.
- Примечание: Многие пилоты выбирают режим «props out», чтобы минимизировать попадание пыли и мусора в камеру. Однако при этом загрязнения направляются внутрь корпуса квадрокоптера. Эта настройка также может помочь снизить влияние вихревых потоков от пропеллеров («prop wash») на небольших аппаратах.
Тестирование направления вращения моторов («Motor direction»)
При нажатии на эту кнопку открывается инструмент для проверки направления вращения. Он позволяет безопасно запустить моторы (без пропеллеров!) и изменить направление их вращения в соответствии с выбранной конфигурацией миксера.
Функции ESC/моторов (ESC/Motor Features)
Протокол ESC/моторов (ESC/Motor Protocol)
Рекомендуется использовать протокол DShot, так как он является стандартом для современных сборок и обеспечивает наилучшую производительность и функциональность.
Примечание: Скорость работы DShot должна соответствовать частоте цикла PID. Более низкие скорости DShot не способны передавать обновления достаточно быстро для полного использования высоких частот цикла PID. Рекомендуемые сочетания:
- 8 кГц (частота цикла) — DShot600
- 4 кГц (частота цикла) — DShot300
- 2 кГц (частота цикла) — DShot150
Другие протоколы, такие как Oneshot125, применяются только для очень старых регуляторов (например, оригинальных BLHELI). Современные ESC (BLHeli_S, BLHeli_32, BlueJay или AM32) должны использовать DShot.
Остановка моторов (MOTOR_STOP)
Эта функция предотвращает вращение моторов на холостом ходу сразу после включения питания (армирования).
ВАЖНО: Обычно эта функция не требуется. Считается более безопасным оставлять моторы вращающимися на холостом ходу после армирования, так как это позволяет окружающим видеть, что квадрокоптер включён и готов к полёту.
Поведение моторов при армировании в зависимости от настроек:
| Настройки | Поведение моторов |
|---|---|
| AIRMODE отключён & MOTOR_STOP включён | Моторы остаются неподвижными до тех пор, пока не будет увеличена тяга (газ). |
| AIRMODE отключён & MOTOR_STOP отключён | Моторы начинают вращаться на холостом ходу сразу после армирования. |
| AIRMODE включён | Моторы всегда вращаются после армирования, даже при нулевой тяге. |
Датчик ESC (ESC_SENSOR)
Эта функция позволяет использовать данные телеметрии от регуляторов скорости, полученные через UART-соединение, настроенное во вкладке «Ports».
Двунаправленный DShot (Bidirectional DShot)
Требуется для фильтрации данных об оборотах (RPM). В отличие от обычного режима, когда полётный контроллер только отправляет команды на регуляторы, при двунаправленном DShot контроллер также принимает обратные данные от ESC по тому же сигнальному проводу.
Примечание: По умолчанию передаются только данные об оборотах (RPM). Однако с помощью команды dshot_edt в CLI можно включить расширенную телеметрию DShot (EDT) для получения данных о напряжении, токе и температуре регуляторов. Эта функция требует современной прошивки ESC (BlueJay, AM32 или BLHELI32). Расширенная телеметрия DShot позволяет передавать данные по сигнальному проводу без необходимости дополнительных UART-соединений, что упрощает подключение и настройку полётного контроллера.
Количество полюсов мотора (Motor poles)
Указывает количество постоянных магнитов, установленных внутри ротора (колокола) мотора.
Примечание: Более крупные моторы, такие как 2207 или 2306, обычно имеют 14 магнитов, тогда как моторы размером 1103 и меньше чаще всего оснащены 12 магнитами. Переход с 12 на 14 магнитов обычно происходит у моторов размером 14xx/15xx.
Холостой ход мотора (% статический) (Motor idle (% static))
Устанавливает минимальное значение выходного сигнала мотора для обеспечения плавного набора оборотов с холостого хода без задержек и потери контроля.
Примечание: Значение обычно увеличивают для улучшения плавности выхода из пикирования, а уменьшают — чтобы избежать нежелательной направленной вниз тяги во время перевёрнутых манёвров.
Функции ESC/моторов для 3D-полёта (3D ESC/Motor Features)
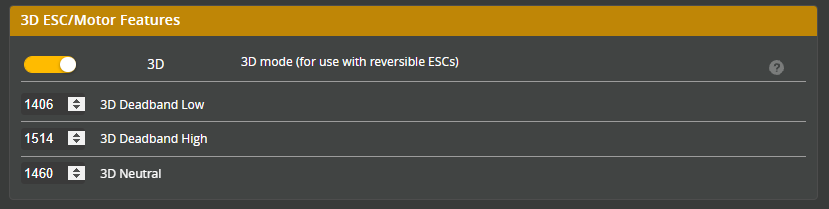
3D (Включить 3D-режим)
Позволяет моторам вращаться в обоих направлениях, что необходимо для выполнения перевёрнутого полёта. В этом режиме нулевая тяга соответствует среднему положению стика (50%), самое нижнее положение стика даёт максимальную отрицательную тягу, а самое верхнее — максимальную положительную тягу.
Примечание: Режим Air Mode работает некорректно при активированном 3D-режиме. Рекомендуется отключить постоянный Air Mode во вкладке «Configuration» и настроить его привязку к переключателю во вкладке «Modes», чтобы Air Mode автоматически отключался при активации 3D-режима. Для этого установите диапазон срабатывания «Air Mode» на тот же канал переключателя и те же значения, что и для опции «Disable 3D Mode».
ОПАСНОСТЬ: Функции спасения по GPS (GPS Rescue) и аварийной посадки (Failsafe Landing Mode) не поддерживаются в 3D-режиме и не будут работать корректно. Будьте предельно осторожны!
3D Deadband low
Нижняя граница зоны нулевой тяги в 3D-режиме, в пределах которой моторы не развивают тягу.
3D Deadband high
Верхняя граница зоны нулевой тяги в 3D-режиме, в пределах которой моторы не развивают тягу.
3D Deadband neutral
Центральная точка зоны нулевой тяги в 3D-режиме, соответствующая нейтральному положению стика.
↑ К оглавлениюРежим тестирования моторов (Motors Test Mode)
Важные предупреждения
ВАЖНО: Будьте предельно осторожны при тестировании моторов на рабочем столе. Внимательно прочитайте этот раздел, если вы не уверены в своих действиях. Всегда соблюдайте правила безопасности при работе с литий-полимерными аккумуляторами. При наличии сомнений рекомендуется использовать устройства безопасности, такие как «дымовые стопперы» (Smoke Stoppers), ограничивающие ток от аккумулятора.
ОПАСНОСТЬ: Всегда снимайте пропеллеры перед подключением аккумулятора и тестированием моторов. Это предупреждение повторяется неоднократно по веской причине. Пожалуйста, соблюдайте осторожность!
Визуализация текущего сигнала моторов
Пропеллеры должны быть сняты перед тестированием. После подключения аккумулятора и перехода регуляторов в рабочий режим моторы можно запустить с помощью ползунков управления.
Индикаторы телеметрии
- R: Обороты в минуту (RPM), полученные от регулятора скорости.
- E: Процент ошибок телеметрии DShot. При выключенном или неисправном регуляторе будут отображаться ошибки. Исправно работающий регулятор должен показывать 0% ошибок или значение, близкое к нулю. Ошибки на уровне 1% и выше обычно указывают на аппаратную проблему. Телеметрия DShot требует современной прошивки регулятора (BlueJay, AM32 или BLHELI32).
- T: Температура регулятора скорости.
Примечание к интерфейсу на скриншоте выше
На приведённом выше скриншоте выбрана конфигурация миксера «QUAD X». Направление вращения моторов не изменено (переключатель «Motor direction is reversed» находится в выключенном состоянии). Протокол установлен в значение DSHOT600. Активированы функции Bidirectional DShot и ESC_SENSOR. Количество полюсов мотора указано как 14. Значение холостого хода мотора установлено на 0%. Все четыре мотора (1–4) отображают значение 1000 (вероятно, это значение сигнала или оборотов в режиме ожидания/теста). Под каждым мотором приведены данные телеметрии: R (обороты), E (ошибки — 0,00%), T (температура — 0 °C). Ползунки управления моторами установлены на значение 1000, а главный ползунок (Master) находится в крайнем правом положении.
↑ К оглавлению![Вкладка Моторы в Betaflight [Motors Tab]](https://technobee.ru/media/zoo/images/line100_COLOR_a43eb70fc020fe7a800e4ffd3cb003de.png "Вкладка Моторы в Betaflight [Motors Tab]")