 для FPV-квадрокоптера в 2026 году")
Как выбрать полетный контроллер (FC) для FPV-квадрокоптера в 2026 году
Эта инструкция‑рекомендация помогает выбрать полётный контроллер для FPV‑дрона в 2026 году: для первого фристайл‑квадрокоптера, компактного cinewhoop, гоночной сборки или цифрового FPV. Ниже собраны критерии выбора, практические рекомендации, сравнение популярных моделей, типовые ошибки и итоговый чек‑лист перед покупкой.
Главная мысль: полётный контроллер нужно выбирать не по самой громкой спецификации, а по сочетанию размера рамы, типа полёта, прошивки, свободных UART, питания видеосистемы и удобства сборки.
Содержание
- 1. Цели инструкции
- 2. Что такое полётный контроллер
- 3. Как выбирать по процессору и прошивке
- 4. Как выбирать по интерфейсам, датчикам и питанию
- 5. Как выбирать по размеру, монтажу и цифровому FPV
- 6. Рекомендуемые модели и сравнение подходов
- 7. Практика: типовые задачи (с решениями)
- 8. Чек‑лист самопроверки
1. Цели инструкции
- Понять, какие характеристики полётного контроллера действительно важны, а какие чаще всего переоценивают.
- Научиться выбирать FC под конкретную сборку: фристайл, гонки, cinewhoop, digital, long‑range.
- Понимать, зачем нужны UART, blackbox, датчик тока, барометр и BEC.
- Научиться заранее проверять совместимость FC с рамой, видеосистемой и периферией.
- Избегать типичных ошибок, которые приводят к лишним расходам и переделке сборки.
2. Что такое полётный контроллер
Полётный контроллер — это центральный управляющий модуль FPV‑дрона. Он получает сигналы от приёмника, обрабатывает данные гироскопа и акселерометра, рассчитывает реакцию модели и передаёт команды на регуляторы оборотов моторов.
Именно FC отвечает за то, насколько дрон будет стабильным, отзывчивым и предсказуемым в полёте. Кроме базового управления, современные контроллеры обычно работают с телеметрией, OSD, blackbox‑логами, GPS‑модулями и цифровыми видеосистемами.
На практике FC — это не просто «мозг» дрона, а узел, через который проходят почти все основные сигналы и сервисные функции сборки. Поэтому при выборе важно смотреть не на одну характеристику, а на весь набор возможностей платы.
Частая путаница: что FC не заменяет
Полётный контроллер не является полноценной заменой другим основным компонентам. Даже если плата очень функциональная, она не отменяет необходимости правильно подобрать остальную электронику.
FCне заменяетESC: моторы раскручивает именно регулятор.FCне заменяетприёмник: радиосигнал приходит отдельно.FCне заменяетVTXи камеру: видеосистема подбирается отдельно.AIOозначает объединение FC и ESC на одной плате, а не наличие всех компонентов дрона в одном модуле.
3. Как выбирать по процессору и прошивке
При выборе полётного контроллера процессор и прошивка определяют, насколько плата будет удобной в настройке, насколько хорошо она подходит под будущие задачи и есть ли у неё запас по возможностям.
статья 2025 года ↩ здесь
Для большинства FPV‑сборок в 2026 году основной реальный выбор — между F4 и F7. H7 — это уже более нишевый вариант, полезный не всем.
F4, F7 и H7 на практике
F4 — это по‑прежнему рабочий и разумный вариант для бюджетной сборки, первого 5‑дюймового фристайл‑квадрокоптера, analog‑конфигураций и большинства обычных сценариев полёта. Если плата удачная по разводке и периферии, F4 не становится «плохим» только потому, что на рынке есть более новые процессоры.
F7 — наиболее универсальный выбор на 2026 год. У него больше запас по вычислительной мощности, обычно лучше совместимость с насыщенной периферией, чаще встречаются удобные решения для digital FPV, а переплата по сравнению с F4 часто оправдана.
H7 — вариант для тех, кто действительно понимает, зачем ему повышенный запас по ресурсам: сложная навигация, расширенная периферия, экспериментальные сценарии, автономные функции. Для первого FPV‑дрона это чаще всего избыточно.
F7.Betaflight, iNav и ArduPilot
Betaflight — основной выбор для FPV‑фристайла и гонок. Это наиболее популярная прошивка, под которую проще найти готовые настройки, инструкции и помощь сообщества. Если сборка нужна для обычного FPV‑полёта, логично начинать именно с неё.
iNav нужен в тех случаях, когда важны GPS‑функции: возврат домой, удержание высоты, навигационные режимы, полёт по точкам. Он особенно полезен для long‑range и сборок, где требуется больше автоматизации.
ArduPilot — более сложная и гибкая система для тех, кто делает действительно расширенную автономную платформу. Для простого фристайла он обычно не нужен.
Выбор прошивки влияет не только на набор функций, но и на требования к самой плате. Например, для навигационной сборки важнее становятся барометр, GPS и запас по портам, чем для обычного freestyle‑квадрокоптера.
Типичные ошибки
Ошибка 1: покупать H7 «на всякий случай»
Если сборка не требует сложной навигации и дополнительных сценариев, переплата за H7 редко даёт ощутимый практический выигрыш.
Ошибка 2: выбирать прошивку не по задаче, а по впечатлению от названия
Для обычного ручного FPV‑полёта сложная навигационная прошивка не делает дрон лучше. Она просто добавляет больше настроек и больше точек, где можно ошибиться.
Ошибка 3: смотреть только на процессор
Плата на F7 может оказаться менее удобной, чем хорошая плата на F4, если у неё хуже питание, меньше доступных портов или неудобная разводка.
Ошибка 4: не думать о будущей периферии
Даже если сейчас GPS или дополнительная телеметрия не нужны, иногда разумно взять плату с небольшим запасом по возможностям.
4. Как выбирать по интерфейсам, датчикам и питанию
На практике очень многие проблемы начинаются не из‑за процессора, а из‑за того, что на плате не хватает UART, отсутствует нужный BEC, не хватает blackbox или не учтены требования видеосистемы. Именно поэтому интерфейсы и питание нужно проверять не менее внимательно, чем сам MCU.
UART и периферия
UART — это последовательный порт, через который подключаются приёмники, GPS‑модули, телеметрия, управление видеопередатчиком и цифровые видеоблоки. Для современной сборки количество UART — это одна из самых важных практических характеристик.
Если у вас только приёмник и обычный аналоговый VTX, требований немного. Но если в сборке появляются цифровой видеоблок, GPS, телеметрия и дополнительные функции, порты заканчиваются очень быстро.
При этом важно понимать, что рекламное число UART не всегда означает столько же реально свободных портов. Некоторые могут быть уже отведены под Bluetooth, ESC telemetry или другие встроенные функции. Поэтому считать нужно не «по карточке товара», а по схеме конкретной платы.
Для обычной 5‑дюймовой сборки желательно иметь хотя бы небольшой запас. Это особенно важно, если вы не уверены, что в будущем не захотите добавить GPS или поменять видеосистему.
IMU, датчик тока, барометр, blackbox, OSD, BEC
Гироскоп (IMU) определяет вращение дрона и напрямую влияет на качество стабилизации. Среди распространённых вариантов встречаются MPU6000, ICM42688P и BMI270. На практике важен не только сам чип, но и то, насколько удачно он реализован на конкретной плате.
Датчик тока позволяет видеть потребление и понимать, сколько энергии осталось в аккумуляторе. Это полезно не только для опытных пилотов, но и для новичков, которым важно не переразряжать батареи.
Барометр особенно полезен в навигационных сценариях, где работают GPS‑режимы, возврат домой и удержание высоты. Для чистого фристайла он не обязателен, хотя его наличие не мешает.
Blackbox нужен для логирования полёта. Он помогает анализировать вибрации, поведение коптера, настройку PID и искать причины проблем. Без него отладка сборки становится заметно сложнее.
OSD выводит в очки или на монитор напряжение батареи, ток, таймер, координаты, высоту и другие данные. Это один из самых полезных сервисных элементов для реального полёта.
BEC отвечает за питание периферии. Через него получают питание приёмник, камера, VTX, GPS и иногда цифровой air unit. Для digital‑сборок это особенно критично: нужно проверять не только наличие разъёма, но и реальное допустимое напряжение и мощность по питанию.
Типичные ошибки
Ошибка 1: считать все UART свободными
Если не проверить схему платы, можно купить FC, на котором формально портов достаточно, но фактически часть из них уже занята встроенными функциями.
Ошибка 2: не проверять схему питания цифровой видеосистемы
Наличие разъёма под air unit ещё не означает, что плата автоматически подходит по питанию под любую цифровую систему.
Ошибка 3: недооценивать blackbox
Без логов значительно сложнее понять, почему дрон трясёт, почему он ведёт себя шумно или почему не удаётся нормально настроить полёт.
Ошибка 4: переоценивать барометр в обычном freestyle
Если GPS‑функции не планируются, наличие барометра приятно, но важнее всё равно остаются порты, blackbox, питание и общая удобность платы.
5. Как выбирать по размеру, монтажу и цифровому FPV
Даже очень хороший полётный контроллер бесполезен, если он физически не подходит к раме или создаёт проблемы при монтаже видеосистемы. Поэтому габариты и компоновка — не менее важны, чем характеристики процессора.
Монтажный формат и совместимость с рамой
Полётные контроллеры выпускаются в нескольких стандартных монтажных размерах. Для компактных моделей чаще используют 20×20 мм, для 3–4‑дюймовых cinewhoop и freestyle‑сборок распространён формат 25.5×25.5 мм, а для большинства 5‑дюймовых рам стандартом остаётся 30.5×30.5 мм.
Перед покупкой нужно проверить не только расстояние между отверстиями, но и доступную высоту стека, расположение стоек, конденсатора, видеопередатчика и приёмника. Особенно это важно в плотных цифровых сборках, где места обычно мало.
Если FC не соответствует раме по формату, сборка либо усложнится, либо потребует адаптеров, переделок или компромиссов по размещению компонентов.
DJI, Walksnail и HDZero
Если сборка планируется под цифровое FPV, контроллер должен быть совместим не только по распиновке, но и по питанию, доступным портам и месту в раме. Это особенно важно для систем DJI, Walksnail и HDZero.
У разных цифровых видеосистем различаются требования по напряжению, способу подключения, необходимости отдельных линий управления и фактической занимаемой площади внутри корпуса дрона. Поэтому обозначение вроде «digital ready» не должно восприниматься как автоматическая гарантия полной совместимости.
При выборе нужно проверить конкретную модель air unit, схему питания, число реально доступных UART, распиновку и то, не будет ли монтаж видеосистемы мешать остальным компонентам.
Типичные ошибки
Ошибка 1: не проверять монтажный размер
Даже хороший FC не подойдёт, если формат крепления не совпадает с рамой или если стек не помещается по высоте.
Ошибка 2: считать все digital‑системы одинаковыми
У разных air unit отличаются питание, коннекторы, размеры и требования к разводке.
Ошибка 3: недооценивать плотность компоновки
На компактных 3–3.5" сборках проблема часто не в выборе процессора, а в том, что после установки FC, VTX и приёмника компоненты начинают мешать друг другу.
Ошибка 4: брать большой stack в маленькую раму
Это не делает сборку лучше, а только усложняет монтаж и ухудшает удобство обслуживания.
6. Рекомендуемые модели и сравнение подходов
Ниже приведены модели, которые разумно рассматривать для разных задач в 2026 году. Перед покупкой конкретного экземпляра обязательно проверяйте ревизию платы, распиновку, схему питания, число реально доступных UART и совместимость с вашей видеосистемой.
Лучшие полётные контроллеры 2026
Сравнительная таблица по ключевым параметрам
Ниже собраны параметры, которые действительно влияют на выбор. Если выбирать между двумя похожими моделями, в первую очередь сравнивайте не маркетинговые цифры, а тип платы, монтажный формат, запас по UART, совместимость с digital FPV, пригодность под GPS и общую логику сборки.
| Модель | Тип | Монтаж | Процессор | Токовый класс | UART / запас | Digital FPV | GPS / iNav | Лучше всего для | Что учитывать перед покупкой |
|---|---|---|---|---|---|---|---|---|---|
| SpeedyBee F405 V4 | Stack | 30.5×30.5 | F4 | Средний / универсальный | Для обычной 5" сборки хватает, но часть портов занята внутренними функциями | Хорошо подходит для analog и популярных digital‑конфигураций | Подходит, есть полезные функции для GPS‑сценариев | Первый 5" freestyle, универсальный бюджетный билд | Это F4; запас по портам нужно считать по мануалу, а не по рекламе |
| Flywoo GOKU GN745 V3 | AIO | 25.5×25.5 | F7 | Средний / уверенный | Хороший запас для компактной, но насыщенной сборки | Один из самых удобных вариантов для compact digital | Подходит для GPS и более сложных сценариев | Cinewhoop, 3–5" digital, tight build | Нужно проверять точную ревизию и комплектацию конкретной платы |
| iFlight Beast F7 V2 55A AIO | AIO | 25.5×25.5 | F7 | Выше среднего | Запас нормальный, но для насыщенной периферии считать нужно заранее | Подходит для analog и digital‑сборок | Нужно проверять ревизию и описание продавца | 4–5" freestyle, мощный AIO среднего класса | Не самый щедрый запас по портам; характеристики ревизий полезно перепроверять |
| Aikon F7 60A AIO | AIO | 25.5×25.5 | F7 | Высокий / под тяжёлую нагрузку | Портов хватает для серьёзной сборки, но без избыточного запаса | Хорошо подходит для HD‑систем и плотных мощных билдов | Подходит, но сильная сторона платы — силовая часть и надёжность | Тяжёлый cinewhoop, 6S, high‑current freestyle | Плата интересна именно под токовую и надёжную сборку, а не как универсал «под всё» |
| T‑Motor F7 Stack | Stack | 30.5×30.5 | F7 | Уверенный класс для 5" | Типовой запас для взрослой stack‑сборки | Хорошо подходит для HD‑ориентированных 5" билдов | Подходит при нормальной компоновке рамы и периферии | Премиальный 5" freestyle, race, cinematic | Менее компактен, чем AIO; интереснее тем, кто осознанно хочет stack |
| NewBeeDrone Infinity200 RS | Race FC / stack | Компактный гоночный формат | F7 | Ставка на race‑архитектуру | Достаточно для гоночной логики и сопутствующей периферии | Не про максимальный комфорт под cinematic digital | Можно использовать с периферией, но это не главная задача платы | Чистый рейсинг, лёгкая и точная гоночная сборка | Специализированный характер: для универсального freestyle есть более логичные варианты |
тип платы, монтаж, совместимость с видео и UART. Только после этого имеет смысл смотреть на разницу между F4 и F7 или на более громкие цифры в названии.SpeedyBee F405 V4 — лучший бюджетный универсал
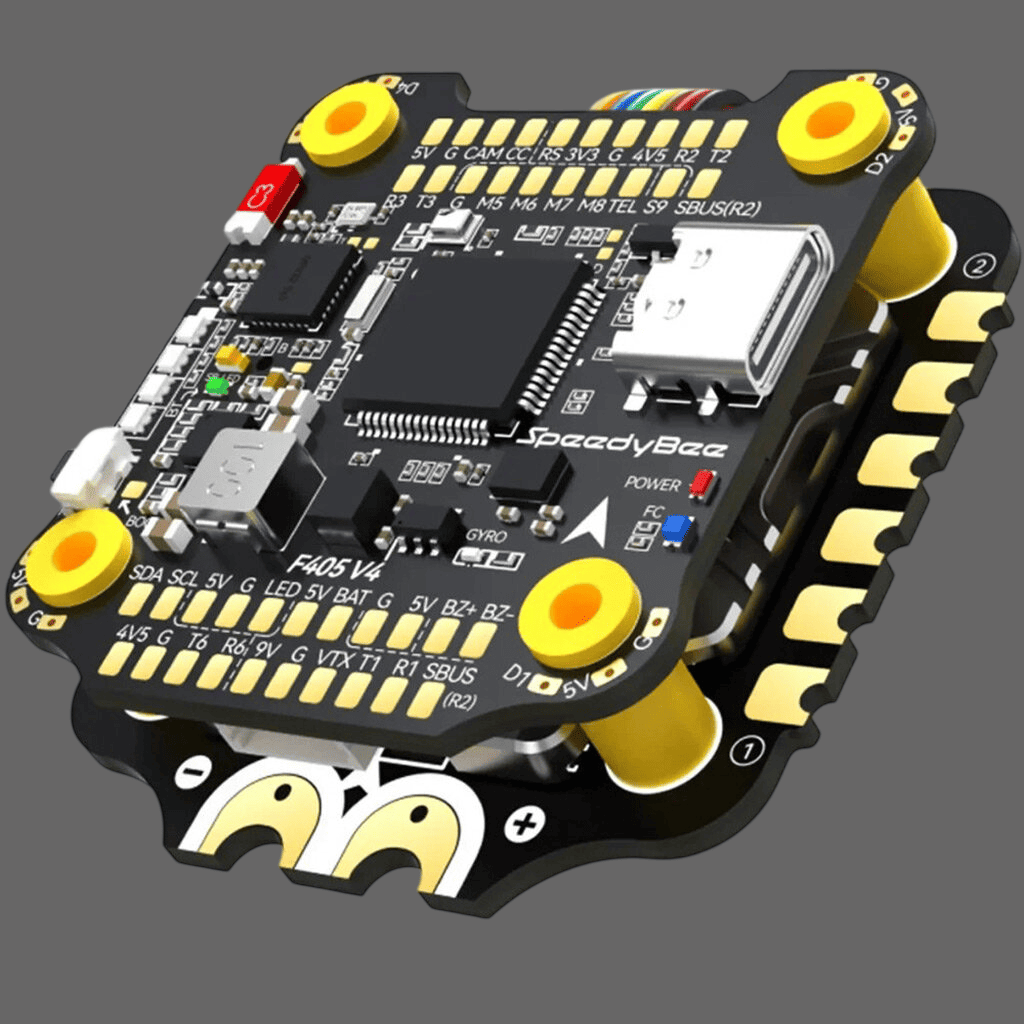
Это один из самых понятных и практичных вариантов для тех, кто собирает первый нормальный FPV‑квадрокоптер или хочет получить максимум возможностей за разумные деньги. SpeedyBee F405 V4 особенно хорош для 5‑дюймового фристайла и универсальных повседневных сборок.
Его сильная сторона — удачный баланс между ценой, функциональностью и доступностью информации по настройке. Это не экзотическая плата, а популярное решение, под которое легко найти инструкции, примеры сборок и пользовательский опыт.
Подходит тем, кто хочет рабочую и понятную основу без лишней переплаты за более дорогой сегмент. Если задача — собрать первый серьёзный дрон и не ошибиться, это один из самых безопасных вариантов.
Flywoo GOKU GN745 V3 — компактный и производительный вариант
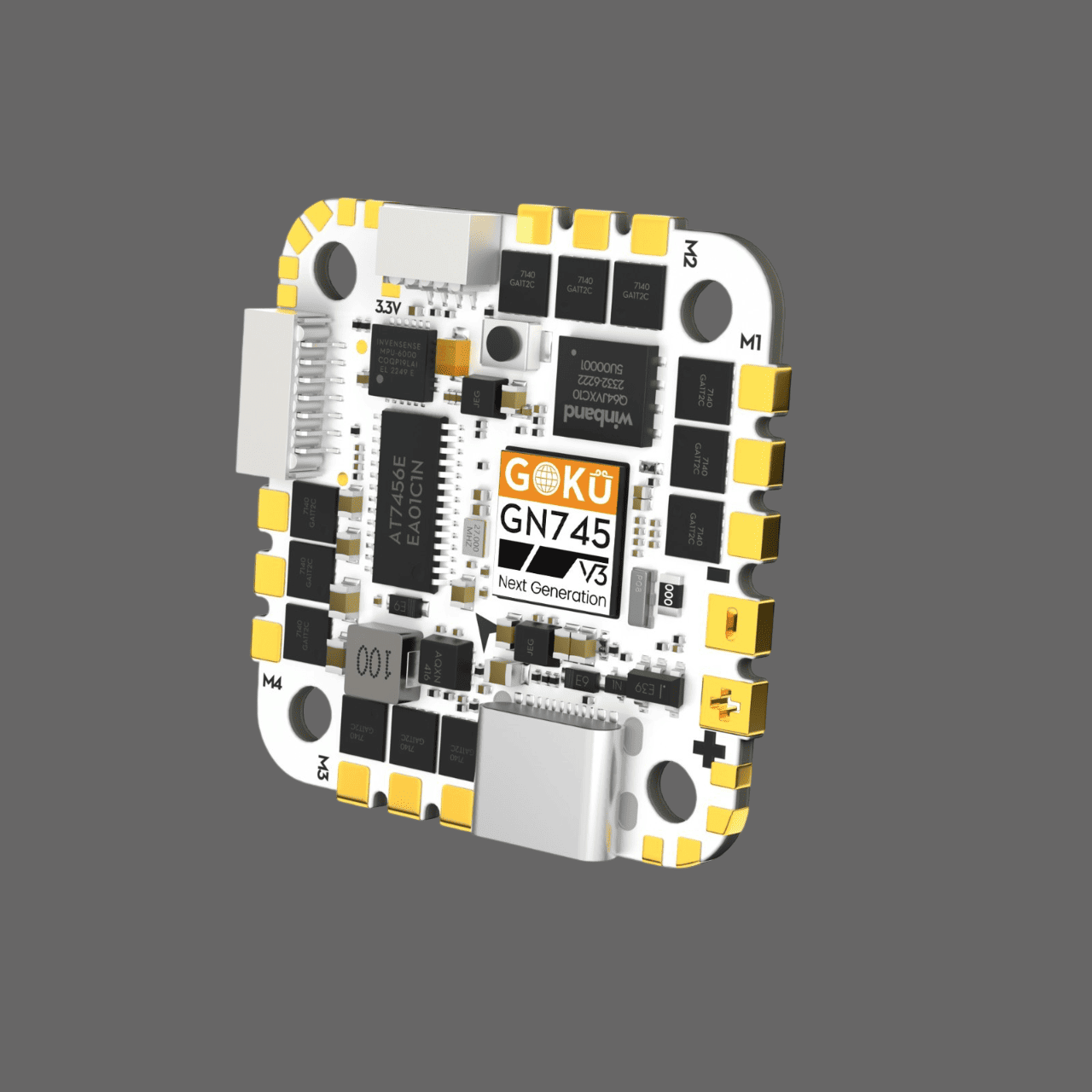
Эта модель ориентирована на компактные, плотные и более современные сборки, где важны размер, цифровая совместимость и производительность. Особенно хорошо подходит для cinewhoop и 3–5‑дюймовых digital‑дронов.
Flywoo GOKU GN745 V3 выбирают те, кому нужен мощный компактный AIO без грубых компромиссов по возможностям. Такой контроллер удобен там, где свободного места мало, но при этом хочется оставить сборку функциональной.
При покупке этой модели особенно важно проверять конкретную ревизию и комплектацию, потому что в разных поставках характеристики отдельных деталей могут отличаться.
iFlight Beast F7 V2 55A AIO — сильный AIO среднего класса
Этот вариант подойдёт тем, кто хочет более мощный AIO для 4–5‑дюймовой сборки, но не планирует уходить в слишком дорогой сегмент. Плата даёт хороший запас по току и остаётся достаточно удобной для практического использования.
iFlight Beast F7 V2 можно рассматривать как шаг вверх по сравнению с базовыми бюджетными решениями. Он подходит пилотам, которые уже понимают, чего хотят от сборки, и ищут более серьёзную основу без явного перекоса в сторону максимальной цены.
Это хороший выбор для умеренно производительного freestyle и плотных сборок, где нужен AIO с более уверенным запасом по мощности.
Aikon F7 60A AIO — выбор для тяжёлых и токовых сборок
Если сборка тяжёлая, токовая и рассчитана на серьёзную нагрузку, Aikon F7 60A выглядит особенно разумно. Это уже решение не просто «на каждый день», а под задачи, где запас по надёжности и питанию играет действительно важную роль.
Такой контроллер хорошо подходит под тяжёлый cinewhoop, мощный freestyle и другие конфигурации, где обычный бюджетный AIO может оказаться слишком компромиссным.
Эту модель стоит выбирать в тех случаях, когда приоритетом является не минимальная цена, а стабильность под высокой нагрузкой.
T‑Motor F7 Stack — премиальный модульный стек
T‑Motor F7 Stack интересен тем, кто ценит аккуратную сборку, понятную модульность и хороший общий уровень исполнения. Это не самый дешёвый вариант, но он подходит тем, кто хочет собрать систему с хорошей ремонтопригодностью и логичной компоновкой.
Стек особенно хорошо смотрится в 5‑дюймовом freestyle и race‑сегменте, где модульная конструкция удобна не только при сборке, но и при последующем ремонте.
Если вам важна не только функциональность, но и комфорт самого процесса сборки, это очень достойный кандидат.
NewBeeDrone Infinity200 RS — вариант под чистый рейсинг
Это плата для тех, кто строит именно гоночную сборку, а не универсальный квадрокоптер «под всё». У неё гоночная направленность, лёгкий вес и акцент на точности и логировании.
NewBeeDrone Infinity200 RS будет особенно уместен там, где важны быстрые реакции, минимальный лишний вес и возможность детально разбирать поведение модели после полёта.
Если задача — именно race‑квадрокоптер, такая специализированная плата часто оказывается логичнее, чем универсальная модель с широким, но не всегда нужным функционалом.
SpeedyBee F405 V4, для компактного digital — Flywoo GOKU GN745 V3, для тяжёлых токовых сборок — Aikon F7 60A, для рейсинга — NewBeeDrone Infinity200 RS.AIO или stack
AIO — это решение, в котором полётный контроллер и ESC объединены на одной плате. Главные плюсы такого подхода — компактность, меньший вес, меньшее число соединений и часто более удобный монтаж в тесной раме. Это особенно хорошо для cinewhoop, компактных digital‑сборок и небольших freestyle‑квадрокоптеров.
Главный минус AIO — меньшая модульность. Если выходит из строя ESC‑часть, часто менять приходится всю плату целиком. Для тех, кто часто жёстко крашит 5‑дюймовые модели, это может быть не самым удобным вариантом.
Stack — это раздельные FC и ESC, собранные в стек. Такой подход немного тяжелее и занимает больше места, но зато намного удобнее в ремонте и даёт больше свободы при выборе компонентов.
Для современной компактной сборки AIO часто логичнее. Для ремонтопригодного 5" freestyle или race‑квадрокоптера stack обычно остаётся более практичным выбором.
AIO. Если важнее ремонт и модульность, лучше брать stack.Типичные ошибки при выборе модели
Ошибка 1: выбирать плату только по току ESC
Высокий ампераж важен, но не заменяет правильный подбор моторов, батареи, видеопитания и качественной пайки.
Ошибка 2: брать AIO в сборку, где нужен быстрый ремонт после крашей
Если дрон регулярно получает серьёзные удары, модульный стек нередко оказывается практичнее.
Ошибка 3: не проверять ревизию конкретной модели
Одна и та же плата может выпускаться в разных вариантах по гироскопу, разъёмам и дополнительным возможностям.
Ошибка 4: покупать премиальную модель без ясной причины
Если сценарий простой, дорогой контроллер не даст пропорционального прироста в результате. Намного важнее, чтобы вся сборка была согласованной.
7. Практика: типовые задачи (с решениями)
Выбор под тип сборки
Задача 1: первый 5" freestyle на 6S
Нужна понятная, не слишком дорогая и универсальная база для обычного FPV‑полёта.
Решение: в таком случае логично смотреть в сторону SpeedyBee F405 V4. Это удачное сочетание цены, функций, доступности и большого количества пользовательского опыта.
Задача 2: компактный 3.5" cinewhoop с digital FPV
Нужна компактная плата с хорошей цифровой совместимостью и без проблем по месту в раме.
Решение: лучше выбирать компактный AIO уровня Flywoo GOKU GN745 V3 или близкий по логике вариант. Здесь важнее размер, питание и удобство подключения digital‑системы, чем максимальная модульность.
Задача 3: тяжёлый 6S cinewhoop
Сборка тяжёлая, токи высокие, нужен запас по надёжности и питанию.
Решение: в таком сценарии разумно выбирать более серьёзный AIO вроде Aikon F7 60A, а не пытаться сэкономить на пограничном варианте.
Задача 4: гоночный квадрокоптер
Приоритет — рейсинг, минимизация лишнего веса и точное поведение модели.
Решение: лучше смотреть на специализированный вариант вроде NewBeeDrone Infinity200 RS, а не на универсальный FC «для всего понемногу».
Проверка совместимости
Задача 5: в сборке будут ELRS, GPS и digital‑видеосистема
Нужно понять, хватит ли контроллеру портов.
Решение: заранее составьте список всех подключаемых устройств и посмотрите по мануалу конкретной платы, какие UART реально свободны. Не ориентируйтесь только на рекламную цифру в карточке товара.
Задача 6: нужно выбрать между AIO и stack
Сборка 5", полёты активные, возможны частые краши.
Решение: если приоритет — ремонтопригодность, лучше брать stack. Если важнее компактность и более простая компоновка, тогда AIO.
Задача 7: контроллер заявлен как совместимый с digital FPV
Нужно понять, действительно ли он подходит под конкретный air unit.
Решение: проверьте точную модель видеоблока, допустимое питание, распиновку, наличие свободного UART, место в раме и требования по BEC. Только после этого можно считать совместимость подтверждённой.
Задача 8: хочется не переплатить, но и не купить слишком слабую плату
Нужен обычный freestyle‑дрон без сложной автономии.
Решение: разумный выбор — F4 или F7, наличие blackbox, датчика тока, достаточного числа UART и корректного питания под вашу периферию. В таком сценарии нет смысла гнаться за H7 и «максимальными» характеристиками.
8. Чек‑лист самопроверки
Отметьте пункты, которые вы действительно понимаете и можете проверить без подсказок.
| ✓ | Навык | Проверка |
|---|---|---|
| Понимание роли FC | Могу объяснить, что делает полётный контроллер и чем он отличается от ESC, приёмника и видеосистемы. | |
| Выбор процессора | Могу понять, когда достаточно F4, когда лучше F7, и в каких случаях H7 действительно оправдан. | |
| Выбор прошивки | Могу определить, когда нужен Betaflight, а когда имеет смысл смотреть на iNav или ArduPilot. | |
| Подсчёт UART | Могу заранее посчитать, сколько портов потребуется под приёмник, GPS, телеметрию и цифровое видео. | |
| Понимание датчиков | Могу объяснить, зачем нужны IMU, датчик тока, барометр, OSD и blackbox. | |
| Проверка питания | Могу проверить, подходит ли BEC и схема питания FC под мою периферию и видеосистему. | |
| Проверка монтажного формата | Могу сверить размер платы с рамой и понять, поместится ли она в сборке. | |
| Digital‑совместимость | Могу проверить не только наличие разъёма, но и распиновку, UART, питание и место под air unit. | |
| Выбор между AIO и stack | Могу объяснить, почему для моей сборки лучше AIO или модульный стек. | |
| Финальный выбор модели | Могу выбрать подходящий FC под freestyle, cinewhoop, race или digital‑сборку и аргументировать свой выбор. |
- Среда, 18 марта 2026