
Как выбрать FPV‑моторы для дрона в 2026 году
Эта инструкция‑рекомендация помогает выбрать FPV‑моторы для дрона в 2026 году: для первого 5‑дюймового фристайл‑квадрокоптера, гоночной сборки, компактного cinewhoop, микро‑билда или tiny whoop. Ниже собраны ключевые правила выбора, сравнительные рекомендации по размеру, KV, тяге и эффективности, а также подборка наиболее интересных моторов под разные сценарии полёта.
Главная мысль: FPV‑моторы нужно выбирать не по бренду или цене отдельно, а по сочетанию размера пропеллеров, веса квадрокоптера, аккумулятора, KV, типа полёта и ожидаемой надёжности после крашей.
Содержание
Обучающая статья по двигателям ↩ здесь
1. Цели инструкции
- Понять, какие параметры моторов действительно влияют на полёт, а какие чаще переоценивают.
- Научиться подбирать мотор под размер квадрокоптера, пропеллеры, батарею и стиль пилотирования.
- Разобраться, как соотносятся размер статора, KV, тяга, крутящий момент, вес и эффективность.
- Понять разницу между бюджетными, универсальными, гоночными и премиальными моторами.
- Научиться избегать типичных ошибок: слишком высокий KV, неправильный размер, недостаток тяги и бессмысленная переплата.
рама + пропеллер + аккумулятор + ESC + стиль полёта.2. Что такое FPV‑моторы и какие бывают
FPV‑моторы — это силовая часть квадрокоптера, которая превращает электрическую энергию от аккумулятора во вращение пропеллеров и тягу. Именно от моторов зависят отклик на газ, резкость подхвата, способность быстро менять направление, общая динамика, температура системы и во многом даже ощущение “живости” дрона в воздухе.
На практике моторы влияют не только на максимальную скорость. Они определяют, насколько квадрокоптер будет «тянуть» в резких манёврах, насколько легко удерживать плавный газ в кинематографичном фристайле, насколько агрессивно он будет реагировать в рейсинге и насколько быстро будет расходоваться аккумулятор.
Из-за этого мотор нельзя выбирать по одному параметру. Два мотора одинакового размера могут ощущаться в полёте по‑разному из‑за разного KV, конструкции статора, качества магнитов, веса, эффективности и даже банально из‑за того, насколько хорошо они переживают обычные краши.
Brushed и brushless (Щеточные и бесщеточные моторы): что выбрать
Brushed / Щеточные моторы — это простой и дешёвый вариант, который в основном встречается на очень маленьких дронах и старых микро‑платформах. Их плюс — низкая цена и простота. Минусы — низкий ресурс, меньшая мощность, худшая эффективность и заметно более ограниченные возможности по сравнению с современными решениями.
Brushless / Бесщеточные моторы — это стандарт для любого серьёзного FPV‑квадрокоптера. Именно они используются на freestyle, race, cinewhoop, long‑range и большинстве современных whoop‑сборок. Они мощнее, долговечнее, эффективнее и лучше подходят для высоких нагрузок и динамичного полёта.
Если речь идёт о нормальном FPV‑дроне для улицы, фристайла, гонок, цифрового видео или просто осмысленной сборки — выбирать нужно именно
brushless. Поэтому вся эта инструкция посвящена именно бесколлекторным моторам.
brushless.3. Как выбирать по тяге, размеру и KV
Самые важные базовые параметры при выборе моторов — это тяга, размер и KV. Именно они отвечают за то, сможет ли квадрокоптер уверенно летать, насколько резким он будет и насколько хорошо моторы совпадут с пропеллерами и аккумулятором.
Правило 1: достаточно тяги
Моторы должны обеспечивать достаточный запас тяги относительно общего веса квадрокоптера. Если сборка слишком тяжёлая для выбранных моторов, дрон будет плохо висеть на газу, быстро упираться в предел тяги, неохотно выходить из манёвров и в целом ощущаться вялым или даже опасным.
Практическое правило для FPV‑сборок: суммарная тяга всех четырёх моторов должна быть значительно больше веса квадрокоптера. Для агрессивного FPV‑полёта часто ориентируются на очень серьёзный запас. Это позволяет не только ускоряться и резко маневрировать, но и держать комфортный диапазон газа без ощущения, что дрон летит «на пределе».
Если моторы выбраны на грани, коптер будет хуже восстанавливаться после резких движений, станет менее стабильным на выходе из фигур и будет сильнее нагружать батарею. Поэтому недостаток тяги — одна из самых неприятных ошибок в подборе силовой системы.
Правило 2: размер мотора под размер пропа
Размер FPV‑мотора обычно записывается четырьмя цифрами, например 2207, 2306 или 1404. Первые две цифры — диаметр статора, вторые две — его высота. Чем мотор крупнее, тем больше он обычно способен развивать тягу и крутящий момент, но вместе с этим увеличиваются вес и нагрузка на систему.
Для 5‑дюймовых сборок классикой считаются размеры 2207, 2306 и близкие к ним варианты. Это основной диапазон для фристайла и гонок. Для 3–4‑дюймовых квадрокоптеров распространены 1404, 1507, 1804, 2004. Для 7‑дюймовых long‑range платформ обычно нужны уже более крупные моторы, например 2806 и больше.
Ключевой принцип здесь простой: маленький пропеллер не раскрывает крупный тяжёлый мотор, а большой пропеллер часто перегружает слишком маленький мотор. Поэтому размер мотора всегда должен соответствовать размеру пропеллера и сценарию полёта.
| Размер квадрокоптера | Типичные размеры моторов | Где применяется |
|---|---|---|
| 65 мм whoop / tiny whoop | 0702, 0802 и близкие | Микро‑полёты, tiny whoop, indoor |
| 3–4" | 1404, 1507, 1804, 2004 | Микро‑фристайл, лёгкий cinewhoop, sub‑250 |
| 5" | 2207, 2306, 2306.5 | Freestyle, racing, универсальные FPV‑сборки |
| 7" | 2806 и крупнее | Long‑range, тяжёлые платформы |
Правило 3: правильный KV под батарею
KV показывает, насколько быстро мотор вращается на каждый вольт без нагрузки. Чем выше KV, тем выше обороты и тем более резким и «нервным» может быть мотор. Чем ниже KV, тем мотор обычно спокойнее, тяговитее на низах и лучше дружит с большими пропеллерами.
Для 6S и 5‑дюймового фристайла обычно популярны диапазоны 1750–1900KV. Это даёт хороший баланс между мощностью, контролем и эффективностью. Более высокие значения, например 1900–2100KV, уже ощущаются заметно агрессивнее. Всё, что ещё выше, чаще нужно либо под очень специфические настройки, либо под рейсинг и опытного пилота.
Для 4S традиционно используют более высокий KV — часто около 2400–2700KV на 5". Для 3–4" микро‑сборок значения KV обычно заметно выше, потому что пропеллеры меньше и мотору нужно раскручиваться сильнее. Для whoop‑моторов значения KV вообще могут выглядеть очень большими — это нормально для такого класса.
Самая частая ошибка новичка — выбрать слишком высокий KV «ради скорости». На практике такой дрон становится более дёрганым, хуже контролируется по газу, сильнее греется и быстрее разряжает аккумулятор.
| Сценарий | Ориентир по KV | Комментарий |
|---|---|---|
| 5" freestyle на 6S | 1750–1900KV | Хороший баланс мощности и контроля |
| 5" aggressive / racing на 6S | 1900–2100KV | Более агрессивный характер, выше требования к пилоту |
| 5" на 4S | 2400–2700KV | Классический диапазон для 4S‑конфигураций |
| 3–4" micro | 3800–4600KV и около того | Зависит от пропов и веса сборки |
| Tiny whoop | Очень высокий KV | Нормально для очень маленьких пропеллеров |
Типичные ошибки
Ошибка 1: брать моторы без запаса по тяге
Такой квадрокоптер летит на пределе возможностей, хуже реагирует на манёвры и быстро разряжает батарею.
Ошибка 2: ставить слишком маленький мотор на крупный проп
Это приводит к перегрузке, перегреву, нестабильной тяге и плохому ощущению дрона в полёте.
Ошибка 3: выбирать KV только по принципу «чем выше, тем быстрее»
Высокий KV делает дрон более резким и сложным в контроле, а не просто «лучше».
Ошибка 4: не учитывать аккумулятор
Один и тот же мотор на 4S и 6S будет вести себя совершенно по‑разному, поэтому батарея всегда учитывается заранее.
4. Как выбирать по характеру мотора
После того как базовые вещи — размер, тяга и KV — уже понятны, вступают в игру более тонкие различия: как мотор откликается на газ, насколько он тяговит на низах, как ведёт себя в резких перекладках, сколько весит и насколько эффективно расходует аккумулятор.
Широкий или высокий статор
Даже если два мотора похожи по размеру, например 2207 и 2306, их характер в воздухе может отличаться. Более широкий статор обычно даёт больше крутящего момента, более спокойную и плотную тягу, лучшую работу на тяжёлых пропах и часто более плавное ощущение в полёте.
Более высокий статор обычно воспринимается как более «резкий» и отзывчивый. Такие моторы любят пилоты, которым важны быстрые изменения оборотов и острая реакция дрона, особенно в рейсинге и агрессивном управлении.
Если упростить, то широкие моторы чаще ассоциируются с тягой и спокойной силой, а более высокие — с откликом и резкостью. Но это не жёсткое правило: многое зависит от конкретной конструкции, магнитов, веса ротора и общей настройки коптера.
Вес и эффективность
Вес мотора — недооценённый параметр. Моторы стоят на концах лучей, поэтому лишние граммы увеличивают инерцию всей системы. Это означает, что слишком тяжёлые моторы могут сделать квадрокоптер менее резким в перекладках, флипах и быстрых сменах направления.
При этом лёгкий мотор не всегда лучше. Очень лёгкие решения могут оказаться менее живучими после ударов, а в некоторых сценариях просто не дадут нужного крутящего момента. Поэтому задача — не взять самый лёгкий мотор, а подобрать разумный баланс между весом, прочностью и поведением в полёте.
Эффективность тоже важна. Более эффективный мотор лучше переводит энергию батареи в тягу, меньше греется и позволяет летать дольше. Для фристайла это приятно, для long‑range и кинематографичных полётов — особенно важно, а для гонок иногда часть эффективности сознательно меняют на более жёсткую производительность.
Если вы хотите больше времени в воздухе, меньше нагрев и более щадящий расход аккумуляторов, эффективность стоит учитывать не меньше, чем «сухую мощность».
Система POPO
POPO — это система быстрой установки и снятия пропеллеров. Её идея проста: пропеллеры можно снять и поставить быстрее, без постоянной работы инструментом, что удобно при частых крашах и замене пропов в поле.
Такой подход действительно может экономить время, особенно если вы много летаете и часто меняете повреждённые пропы. Но сама по себе система POPO не делает мотор лучше по полётным характеристикам. Это скорее вопрос удобства обслуживания.
Если мотор поддерживает POPO, это можно считать приятным бонусом, но не ключевым фактором выбора. Намного важнее размер, KV, тяга, надёжность и общая совместимость со сборкой.
Типичные ошибки
Ошибка 1: считать более тяжёлый мотор автоматически более «серьёзным»
Дополнительный вес не всегда даёт практическую пользу. Иногда он только делает дрон менее живым.
Ошибка 2: игнорировать эффективность
Не все моторы одинаково рационально расходуют батарею. Для долгих и плавных полётов это особенно важно.
Ошибка 3: выбирать мотор только по удобной «фишке» вроде POPO
Удобство обслуживания полезно, но не должно затмевать базовые параметры мотора.
Ошибка 4: не учитывать характер мотора
Даже моторы одного класса могут по‑разному ощущаться в полёте. Важно выбирать не только цифры, но и поведение под ваш стиль.
5. Как выбирать моторы под конкретную сборку
Правильный мотор — это тот, который подходит не «вообще», а именно под ваш размер квадрокоптера, батарею, стиль полёта и уровень пилота. Один и тот же мотор может быть отличным для гоночного 5" и неудобным для спокойного freestyle‑билда.
Размер мотора и тип квадрокоптера
Для 5‑дюймовых дронов наиболее универсальными остаются 2207, 2306 и близкие варианты. Это золотая середина между тягой, откликом и совместимостью с огромным количеством пропеллеров и рам.
Для 3–4‑дюймовых микро‑сборок уже нужны более компактные моторы: 1404, 1507, 1804, 2004 и близкие размеры. Здесь особенно важно соблюдать баланс между весом и тягой, потому что каждая лишняя деталь сильно влияет на итоговую динамику.
Для tiny whoop выбирают сверхмалые моторы, в том числе 0702‑класс. Здесь действуют совсем другие масштабы: пропеллеры очень маленькие, KV очень высокий, а требования к весу особенно жёсткие.
Для 7‑дюймовых и long‑range‑сборок обычно используют более крупные моторы с заметно меньшим KV. Здесь на первый план выходит не резкость, а тяга, эффективность и умение спокойно тянуть большие пропы на длительном полёте.
Freestyle, racing, cinewhoop, whoop, long‑range
Freestyle требует баланса между мощностью, откликом, плавностью и прочностью. Это не обязательно самые злые моторы. Часто лучшими оказываются именно универсальные и предсказуемые варианты, которые не перегружают пилота лишней нервностью.
Racing сильнее зависит от мгновенного отклика, малого веса и способности быстро менять обороты. Здесь больше ценятся резкость и скорость реакции, а пилот обычно готов мириться с тем, что моторы менее щадящие к аккумулятору.
Cinewhoop и плавный cinematic freestyle требуют более линейной подачи тяги, предсказуемого газа и спокойной работы под нагрузкой. Для таких задач многие предпочитают моторы, которые ощущаются более «масляно» и ровно.
Whoop‑сборки живут по своим правилам: вес и размер здесь критичнее, чем почти всё остальное. Поэтому для whoop‑моторов особенно важны лёгкость, плавность и хорошая эффективность в микро‑масштабе.
Long‑range в первую очередь требует эффективности и способности стабильно вращать крупные пропы без лишнего нагрева и потерь. Здесь агрессивный характер мотора часто менее важен, чем экономичность.
Типичные ошибки
Ошибка 1: ставить гоночные моторы в спокойный freestyle‑билд
Дрон может получиться слишком нервным, прожорливым и менее приятным в обычном полёте.
Ошибка 2: ставить тяжёлые 5" моторы в лёгкую микро‑сборку
Такой квадрокоптер теряет смысл компактности и становится хуже по инерции и эффективности.
Ошибка 3: недооценивать стиль полёта
Даже технически совместимый мотор может не подойти именно под ваш сценарий, если его характер не совпадает с задачей.
Ошибка 4: копировать чужую сборку без учёта своего веса и батареи
Даже моторы одного размера ведут себя по‑разному на более тяжёлом или более лёгком квадрокоптере.
6. Рекомендуемые моторы и сравнение подходов
Ниже приведены модели, которые можно рассматривать в 2026 году для разных сценариев: универсальный 5" freestyle, premium‑уровень, бюджетный сегмент, гонки, микро‑сборки, whoop и более плавный cinematic freestyle. Смысл этого списка — не объявить один мотор «лучшим для всех», а показать, какие варианты наиболее логично смотрятся под разные задачи.
Лучшие FPV‑моторы 2026
Сравнительная таблица по ключевым параметрам
Сначала — краткое сравнение по параметрам, которые действительно влияют на выбор: размер, KV, типичная батарея, стиль полёта, сильная сторона и главный компромисс.
| Модель | Размер | KV | Батарея / класс | Оптимально для | Главный плюс | Что учитывать |
|---|---|---|---|---|---|---|
| iFlight XING2 2207 | 2207 | 1855KV и др. | 6S / 5" | Универсальный freestyle | Очень удачный баланс цены, ресурса и ощущений в полёте | Не самый дешёвый, но один из самых безопасных универсальных выборов |
| AOS Supernova 2207 | 2207 | Премиум‑класс | 6S / 5" | Максимальная производительность | Инженерно вылизанный premium‑подход | Дорогой и не всем даст ощутимую разницу в реальном полёте |
| EMAX Eco II 2207/2306 | 2207 / 2306 | 1700–1900KV, 2400KV | 6S / 4S | Бюджетный freestyle, обучение | Сильное соотношение цены и практической пользы | Это не luxury‑класс, а честный рабочий бюджет |
| RCinPower GTS V4 MCK 2207 | 2207 | 2100KV | Агрессивный 5S/6S race | Соревновательный рейсинг | Высокий отклик и гоночный характер | Для обычного фристайла может быть слишком злым |
| T‑Motor F1404 3800KV | 1404 | 3800KV | Micro / 3–4" | Лёгкие 3–4" сборки | Очень удачный баланс для sub‑250 и микрофристайла | Не для тяжёлого 5" и не для больших пропов |
| NewBeeDrone FLOW 0702 27000KV | 0702 | 27000KV | Tiny whoop | 65 мм whoop и микро‑фристайл | Плавность и качество в микро‑классе | Для tiny whoop дорого, но это premium‑вариант |
| NewBeeDrone Smoov V2 2306.5 | 2306.5 | 1750KV | 6S / cinematic freestyle | Плавный и линейный фристайл | Очень мягкая и предсказуемая подача тяги | Не про максимальную злость, а про smooth‑характер |
| iFlight Xing‑E 2207 | 2207 | 1800KV | 6S / budget race & freestyle | Бюджетный вариант с хорошей живучестью | Хороший компромисс между ценой и прочностью | Меньше премиальных материалов, чем у старшей линейки XING |
| T‑Motor Velox 2207 | 2207 | 1950KV | 6S / 5" | Freestyle с упором на value | Стабильно сильный вариант по адекватной цене | Иногда незаслуженно недооценивается на фоне более громких линеек |
класс сборки, затем размер, потом KV, и только после этого сравнивайте бренд, материалы и цену.iFlight XING2 2207 — лучший универсальный вариант

Если нужен мотор, который делает почти всё хорошо и не выглядит бессмысленно дорогим, iFlight XING2 2207 — один из самых разумных выборов. Это универсальный мотор для 5" freestyle, который сочетает хорошую плавность, достаточную агрессию, нормальную эффективность и хорошую репутацию по надёжности.
Его сильная сторона в том, что он не требует от пилота каких‑то узкоспециализированных задач, чтобы оправдать свою цену. Он подходит и тем, кто уже летает регулярно, и тем, кто хочет взять действительно хороший мотор без ухода в экстремальный premium‑сегмент.
Для 6S‑сборок вариант около 1855KV особенно удачен: он даёт хороший баланс между контролем и мощностью, не превращая квадрокоптер в слишком нервную машину.
AOS Supernova 2207 — премиальная производительность
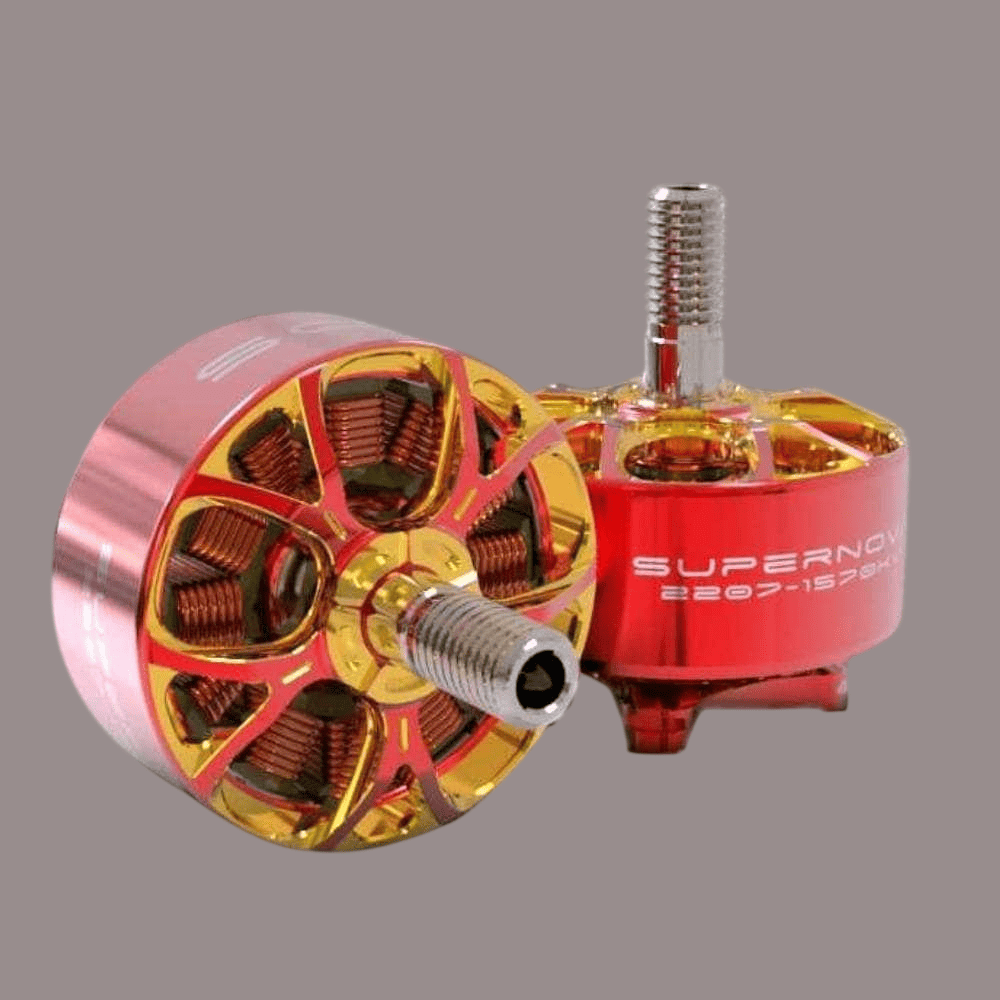
AOS Supernova 2207 — это пример мотора, где сильный упор сделан именно на инженерную оптимизацию. Такой вариант выбирают не потому, что “надо взять что‑то подороже”, а потому что хочется действительно premium‑подхода с акцентом на крутящий момент, эффективность и продуманную конструкцию.
Это мотор для тех, кто любит разбираться в нюансах, ценит тонкие преимущества и готов платить за прибавку не в разы, а в деталях. В реальном полёте разница с сильными обычными моторами будет заметна не всем, но с инженерной точки зрения это один из самых интересных вариантов на рынке.
Если нужен абсолютный максимум в классе 2207 — это сильный кандидат. Если нужен просто хороший мотор для обычного фристайла — часто можно потратить меньше и не почувствовать потери.
EMAX Eco II 2207/2306 — лучший бюджетный выбор

EMAX Eco II — это честный рабочий бюджет, который особенно хорошо смотрится для первых сборок, обучения, частых крашей и тех случаев, когда пилот не хочет уничтожать дорогие моторы на этапе активной практики.
Это не премиальный мотор, и именно в этом его сила: он не пытается казаться чем‑то другим. Он даёт нормальную производительность за вменяемые деньги и позволяет летать, учиться, бить дрон и не страдать каждый раз при замене.
Если вы только входите в FPV, собираете первый freestyle или просто хотите сильный value‑вариант — это одна из лучших отправных точек.
RCinPower GTS V4 MCK 2207 2100KV — мотор под рейсинг

RCinPower GTS V4 MCK — это уже история не про универсальность, а про гоночный характер. Такой мотор создан под агрессивное использование, быстрый отклик и максимальную скорость реакции.
Он особенно уместен там, где пилот реально соревнуется или строит сборку с явным акцентом на race‑динамику. Для обычного freestyle‑пилота такой мотор часто будет избыточно резким, менее forgiving и менее дружелюбным по газу.
Если же задача — именно рейсинг и важны доли секунды, выбор гоночного коллаб‑мотора вполне оправдан.
T‑Motor F1404 3800KV — один из лучших вариантов для 3-4"

T‑Motor F1404 3800KV очень хорошо смотрится в лёгких 3–4‑дюймовых билдах. Это именно тот мотор, который помогает собрать micro‑квадрокоптер без ощущения, что вы поставили что‑то случайное или компромиссное.
Его обычно выбирают там, где важны низкий вес, приятный баланс отклика и тяги и понятное поведение на micro‑фристайле или лёгкой sub‑250 сборке. Вариант 3800KV особенно удобен как золотая середина между слишком спокойным и слишком нервным характером.
Если нужен мотор для универсального 3.5–4" микро‑билда, это один из самых понятных кандидатов.
NewBeeDrone FLOW 0702 27000KV — premium tiny whoop
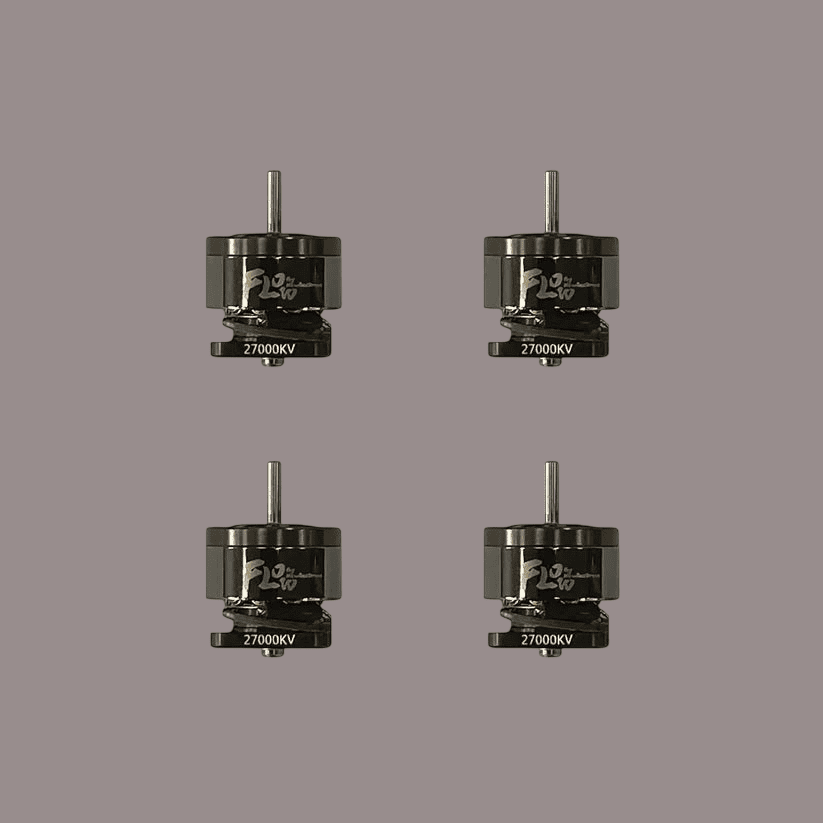
NewBeeDrone FLOW 0702 — это пример того, что даже микро‑мотор может быть сделан на очень высоком уровне. Такие моторы важны в tiny whoop‑сегменте, где каждая мелочь по плавности, весу и эффективности чувствуется сильнее, чем на тяжёлом 5".
Это хороший выбор для тех, кто хочет максимально приятный микро‑опыт, а не просто “самый дешёвый набор моторчиков”. Да, это не бюджетное решение, но оно логично для тех, кто серьёзно относится даже к whoop‑классу.
Если нужен smooth и качественный tiny whoop, это один из самых интересных вариантов.
NewBeeDrone Smoov V2 2306.5 1750KV — плавный cinematic freestyle
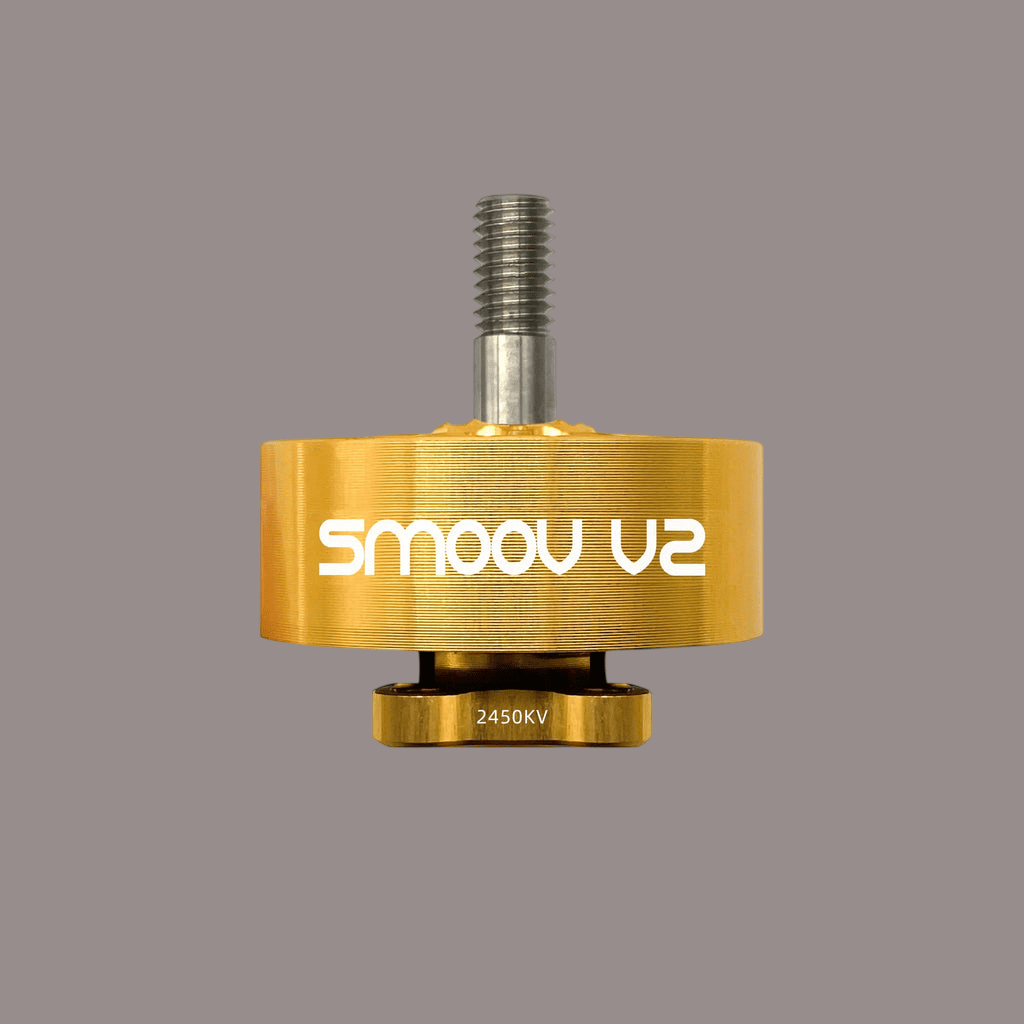
NewBeeDrone Smoov V2 ориентирован на тех, кто ценит линейную подачу тяги, плавность газа и ощущение “мягкой силы” в воздухе. Это мотор не столько про максимальную агрессию, сколько про контролируемый и очень приятный отклик.
Такой вариант особенно интересен для cinematic freestyle, smooth‑полётов и тех пилотов, которым важна не только мощность, но и то, как именно мотор её отдаёт.
Если задача — красивый, ровный и предсказуемый стиль полёта, этот мотор выглядит очень уместно.
iFlight Xing‑E 2207 1800KV — бюджетная альтернатива для тех, кто хочет живучесть
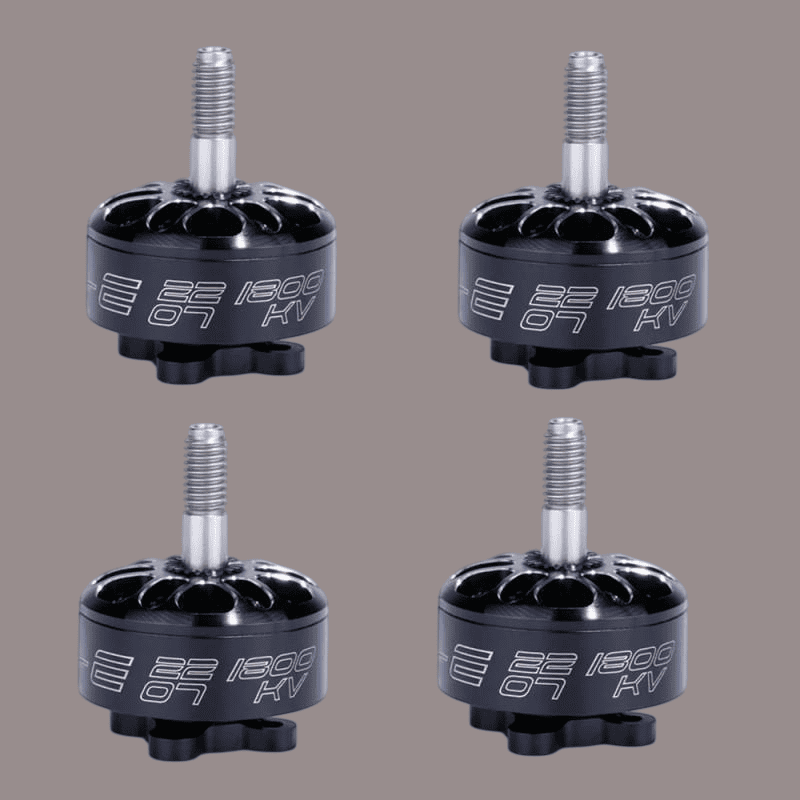
iFlight Xing‑E 2207 — это вариант для тех, кто хочет не совсем базовый бюджет, но и не хочет платить за старшую премиальную линейку. Он особенно интересен тем, кто ценит прочность и хочет получить мотор «без сюрпризов» за более умеренные деньги.
По ощущениям это хороший рабочий выбор для freestyle и бюджетного race/freestyle‑микса, когда хочется чего‑то надёжного и практичного.
Если вам нравится философия XING, но хочется немного сэкономить, это логичный кандидат.
T‑Motor Velox 2207 1950KV — сильный вариант по честной цене

T‑Motor Velox 2207 часто получает меньше внимания, чем более громкие premium‑линейки, но на практике это очень крепкий вариант для 5" freestyle. Он хорошо подходит тем, кто хочет сильный мотор от авторитетного бренда без переплаты за верхний сегмент.
Его главное достоинство — стабильная и понятная ценность. Это не “самый технологичный” мотор в абсолюте, но один из тех вариантов, которые редко оказываются ошибкой.
Если нужен надёжный freestyle‑мотор с хорошим ощущением value, Velox стоит рассматривать обязательно.
iFlight XING2 2207, для максимального premium‑уровня — на AOS Supernova 2207, для бюджетного старта — на EMAX Eco II, для race — на RCinPower GTS V4 MCK, для 3–4" — на T‑Motor F1404, для tiny whoop — на NewBeeDrone FLOW 0702.Стоит ли переплачивать за премиальные моторы
Это один из самых важных практических вопросов. С инженерной точки зрения premium‑моторы действительно могут быть лучше: они могут быть эффективнее, отзывчивее, легче, прочнее, точнее изготовлены и лучше работать на грани возможностей.
Но в реальном полёте разница между очень хорошим бюджетным мотором и дорогим premium‑решением ощущается не всегда. Для большинства пилотов, особенно на этапе обучения, регулярных крашей и обычного freestyle, эта разница будет значительно меньше, чем разница в цене.
Поэтому логика простая:
- Новичок, первый freestyle, частые краши — разумнее бюджетные или value‑моторы.
- Регулярный пилот, хочется сильный универсал — разумнее хороший средний/верхний средний сегмент.
- Соревнования, инженерный максимум, любовь к топ‑компонентам — premium уже имеет смысл.
Типичные ошибки при выборе модели
Ошибка 1: брать самые дорогие моторы для первого дрона
На этапе обучения ресурс и цена замены часто важнее, чем тонкие преимущества premium‑моторов.
Ошибка 2: покупать бюджетный мотор для соревновательного рейсинга
Если задача действительно гоночная, отклик и предельная производительность начинают играть заметно большую роль.
Ошибка 3: выбирать модель только по популярности бренда
У хорошего бренда могут быть и budget‑, и premium‑линейки с разным назначением. Важно смотреть на конкретную серию и задачу.
Ошибка 4: ожидать революции от дорогого мотора
Часто прибавка от premium — это не «другой мир», а более тонкие улучшения в эффективности, отклике и ощущении в полёте.
7. Практика: типовые задачи (с решениями)
Выбор под тип сборки
Задача 1: первый 5" freestyle на 6S
Нужен мотор, который будет приятным в управлении, не слишком дорогим и достаточно живучим.
Решение: логично смотреть в сторону EMAX Eco II как сильного бюджетного старта или iFlight XING2 2207 как более универсального и «взрослого» варианта.
Задача 2: 5" freestyle с акцентом на smooth‑ощущение
Пилоту важна не только мощность, но и мягкая, предсказуемая подача тяги.
Решение: лучше смотреть на более линейные и «приятные» по характеру моторы, например NewBeeDrone Smoov V2 или сильный универсал вроде XING2.
Задача 3: соревновательный race‑квадрокоптер
Приоритет — отклик, скорость, агрессивность и гоночная направленность.
Решение: лучше выбирать специализированные race‑моторы, например RCinPower GTS V4 MCK, а не универсальные фристайл‑варианты.
Задача 4: 3.5–4" sub‑250 micro‑билд
Нужен лёгкий мотор с хорошим балансом между тягой и весом.
Решение: в таком сценарии очень логично смотреть на T‑Motor F1404 3800KV, который хорошо подходит под лёгкие и живые микро‑сборки.
Задача 5: tiny whoop 65 мм
Здесь вес критичен, а моторы работают в совершенно другом масштабе.
Решение: выбирать нужно специализированные микро‑моторы класса 0702, а не пытаться переносить логику 5" сборок на tiny whoop. Для premium‑варианта хорошо подходит NewBeeDrone FLOW 0702.
Выбор под бюджет и стиль полёта
Задача 6: хочется летать много и не бояться крашей
Бюджет ограничен, но нужен рабочий мотор без ощущения «одноразовости».
Решение: разумнее брать сильный бюджет вроде EMAX Eco II или value‑вариант уровня iFlight Xing‑E, а не сразу идти в дорогой premium.
Задача 7: хочется максимум производительности
Пилот осознанно ищет инженерный top‑tier и готов платить за тонкие преимущества.
Решение: в таком сценарии есть смысл смотреть на AOS Supernova 2207 или другие premium‑варианты, понимая, что прибавка будет реальной, но не революционной.
Задача 8: неясно, что важнее — мощность или время полёта
Сборка нужна для обычного полёта, без жёсткой гоночной ориентации.
Решение: лучше выбирать умеренный KV и универсальный размер. Для 5" на 6S хороший ориентир — диапазон около 1750–1900KV.
Задача 9: хочется «побыстрее», поэтому тянет к высокому KV
Пилот думает, что больше KV автоматически означает лучший мотор.
Решение: сначала нужно понять батарею, пропы и стиль полёта. Без этого высокий KV легко превратит дрон в нервную и прожорливую сборку.
8. Чек‑лист самопроверки
Отметьте пункты, которые вы действительно понимаете и можете проверить перед покупкой моторов.
| ✓ | Навык | Проверка |
|---|---|---|
| Понимание типа моторов | Могу объяснить, почему для серьёзного FPV‑дрона обычно выбирают именно brushless‑моторы. | |
| Понимание тяги | Понимаю, почему моторы должны иметь заметный запас тяги относительно веса квадрокоптера. | |
| Выбор размера | Могу подобрать размер мотора под 5", 3–4", tiny whoop или 7" long‑range. | |
| Выбор KV | Могу связать KV с батареей и объяснить, почему слишком высокий KV подходит не всем. | |
| Понимание характера мотора | Могу объяснить разницу между более тяговитым и более резким мотором. | |
| Учёт веса | Понимаю, почему лишний вес моторов влияет на поведение квадрокоптера в воздухе. | |
| Понимание эффективности | Могу объяснить, почему мотор с лучшей эффективностью даёт больше времени полёта и меньше нагрев. | |
| Подбор под стиль полёта | Могу выбрать разные моторы под freestyle, racing, cinewhoop, whoop и long‑range. | |
| Оценка цены | Понимаю, когда достаточно сильного бюджетного мотора, а когда premium действительно имеет смысл. | |
| Финальный выбор модели | Могу выбрать конкретный мотор под свою сборку и аргументировать этот выбор по размеру, KV, стилю полёта и бюджету. |
- Четверг, 19 марта 2026