")
AM32 Настройка регуляторов оборотов двигателей (ESC)
Обновленная и исправленная версия статьи.
Регуляторы оборотов (ESC) с прошивкой AM32 — основной элемент силовой установки современных БПЛА. Настройка ESC напрямую влияет на эффективность, безопасность и надёжность аппарата. В этом материале разобраны все параметры конфигуратора AM32 с техническими обоснованиями, типичными ошибками и практическими задачами для отработки навыков.
Главная идея: ESC — это не просто «регулятор скорости». Это сложное устройство с десятками параметров. Неправильно настроенный Timing Advance, неверно указанное Motor KV или отключённый Low Voltage Cut Off могут привести к отказу мотора, потере аппарата или пожару аккумулятора. Этот материал учит понимать, что каждый параметр делает и почему он установлен именно так.
Содержание
1. Цели статьи
- Понять назначение каждого параметра конфигуратора AM32 на техническом уровне.
- Уметь безопасно подключать, читать и сохранять конфигурацию ESC.
- Знать, какие параметры критически важны для безопасности аппарата и аккумулятора.
- Уметь обновлять прошивку ESC, создавать резервные копии и восстанавливать конфигурацию.
- Различать типичные ошибки настройки и знать, как их устранить.
2. Глоссарий и архитектура ESC
ESC (Electronic Speed Controller, регулятор оборотов) — электронное устройство, которое принимает цифровую или аналоговую команду от полётного контроллера (FC) и преобразует её в управляющие импульсы на трёх фазных обмотках бесколлекторного двигателя (BLDC). Внутри ESC стоят шесть силовых транзисторов (MOSFET), образующих трёхфазный мост, и микроконтроллер, который управляет их переключением согласно алгоритму, заложенному в прошивку.
AM32 — открытая (open-source) прошивка для ESC на 32-битных ARM-микроконтроллерах (STM32, GD32, AT32). Является свободной альтернативой проприетарной BLHeli_32, поддержка которой прекращена. Позволяет производителям не платить лицензионные сборы, что делает AM32-совместимые регуляторы доступнее по цене.
| Термин | Расшифровка | Суть |
|---|---|---|
ESC |
Electronic Speed Controller | Регулятор оборотов бесколлекторного двигателя |
FC |
Flight Controller | Полётный контроллер — мозг БПЛА |
BLDC |
Brushless DC Motor | Бесколлекторный двигатель постоянного тока |
MOSFET |
Metal-Oxide-Semiconductor FET | Полевой транзистор — силовой ключ ESC |
Firmware |
Прошивка | Программа в flash-памяти микроконтроллера ESC |
Bootloader |
Начальный загрузчик | Минимальная программа, позволяющая записать основную прошивку |
EEPROM |
Electrically Erasable Programmable ROM | Энергонезависимая память для хранения настроек пользователя |
Back-EMF |
Back Electromotive Force | Обратная ЭДС — напряжение вращающегося ротора; используется для определения его положения |
KV |
RPM per Volt | Обороты в минуту на 1 В без нагрузки. Пример: 2300 KV × 14,8 В ≈ 34 040 об/мин |
Passthrough |
Режим ретрансляции | FC «прозрачно» пересылает данные между ПК и ESC без обработки |
PWM |
Pulse Width Modulation | Широтно-импульсная модуляция — и протокол FC→ESC, и метод управления MOSFET |
DShot |
Digital Shot | Цифровой протокол FC→ESC с контрольной суммой CRC |
CRC |
Cyclic Redundancy Check | Контрольная сумма в пакете DShot — защита от помех |
eRPM |
Electrical RPM | Электрические обороты; механические RPM = eRPM ÷ количество пар полюсов |
Bidirectional DShot |
BDShot | Двунаправленный DShot: ESC отправляет eRPM обратно в FC для RPM Filtering |
Коммутация |
Commutation | Переключение фаз мотора по определённому алгоритму для создания вращения |
Timing Advance |
Опережение коммутации | Угол (°), на который переключение фаз опережает фактическое положение ротора |
LVC |
Low Voltage Cutoff | Защита от глубокого разряда аккумулятора |
Dead Band |
Мёртвая зона | Диапазон сигнала вокруг нейтрали, при котором ESC не подаёт напряжение на мотор |
Freewheel |
Свободный выбег | Мотор продолжает вращаться по инерции при нулевом газе |
Протоколы связи FC → ESC
Протокол определяет, как полётный контроллер передаёт команды на ESC. Правильный выбор протокола критичен для точности управления и отсутствия помех.
| Протокол | Тип | Скорость обновления | Калибровка | CRC | Применение |
|---|---|---|---|---|---|
PWM (Servo) |
Аналоговый | до 400 Гц | Требуется | Нет | ArduPilot, устаревшее оборудование |
DShot 300 |
Цифровой | ≈ 1000 Гц | Не нужна | Да | F4 FC, PID до 4 кГц |
DShot 600 |
Цифровой | ≈ 2000 Гц | Не нужна | Да | Рекомендован для FPV и гоночных БПЛА |
Внутренняя архитектура ESC
Внутри ESC работают три взаимосвязанных слоя: силовой каскад (6 MOSFET в трёхфазном мосту), логический контроллер (ARM-MCU с прошивкой AM32) и драйверы затворов (управляют MOSFET согласно командам MCU). Алгоритм трапециевидной коммутации переключает фазы ступенчато; синусоидальный — плавно, что важно на малых оборотах.
↑ К оглавлению3. Программное обеспечение и подключение
Конфигуратор AM32
Для настройки и прошивки ESC используется Multi_ESC Config Tool (оффлайн, Windows/Linux/macOS) или онлайн-конфигуратор на am32.ca (работает в Chrome/Edge через Web Serial API). Оба инструмента функционально идентичны.
| Инструмент | Тип | Где получить | Когда использовать |
|---|---|---|---|
Multi_ESC Config Tool |
Настольное приложение | GitHub: AlkaMotors/AM32 | Полевые условия, слабый интернет |
AM32 Online Configurator |
Веб-приложение | am32.ca | Без установки ПО, Chrome/Edge |
ESC-Configurator |
Веб-приложение | esc-configurator.com | Поддержка AM32 + BLHeli_S + Bluejay |
Схема подключения и Passthrough
ESC не подключается напрямую к ПК. Связь осуществляется через полётный контроллер с прошивкой BetaFlight или INAV, поддерживающих режим Passthrough. В этом режиме FC выступает прозрачным мостом между конфигуратором и каждым ESC по сигнальным линиям мотора (M1–M4).
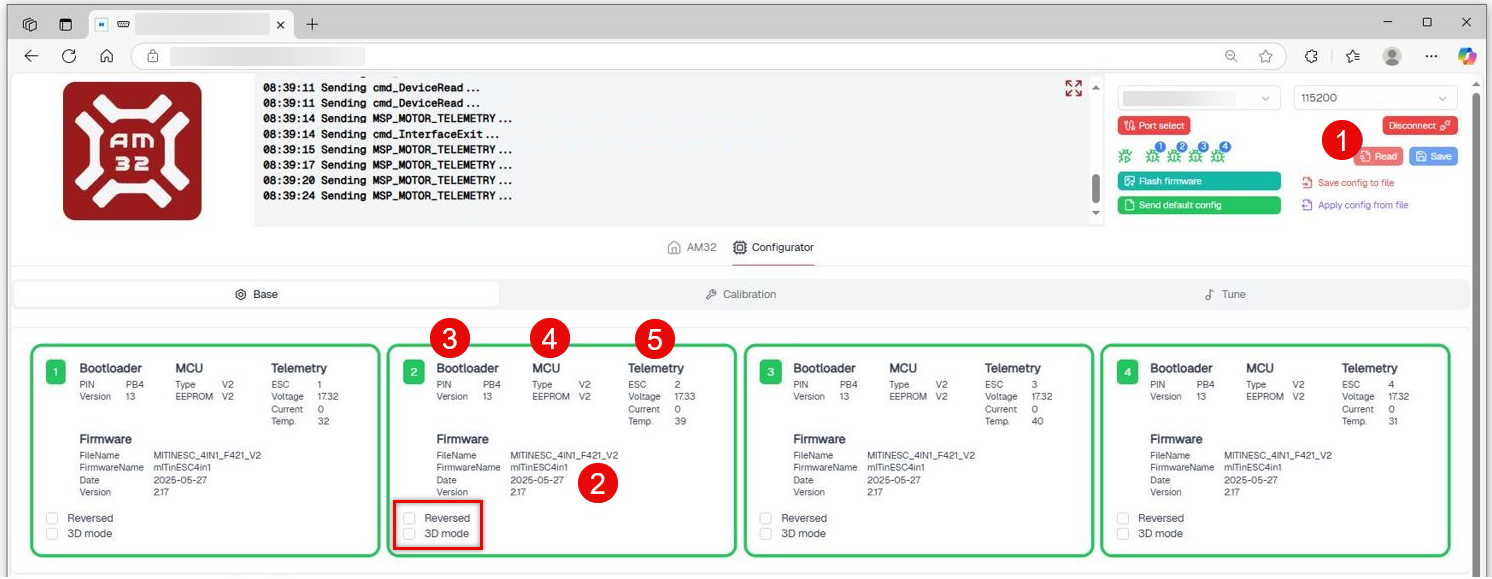
Чтение конфигурации (Read)
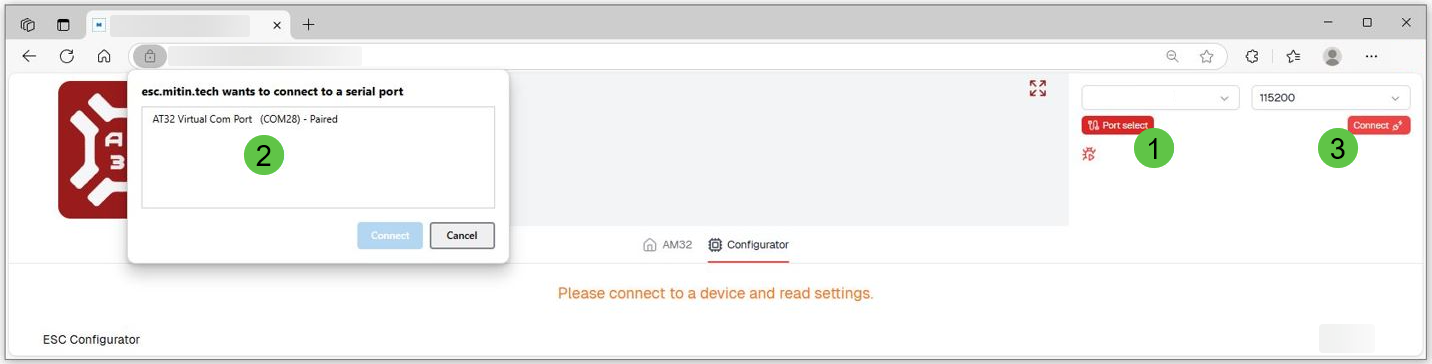
После выбора COM-порта и нажатия Connect → Read конфигуратор последовательно опрашивает каждый ESC и отображает:
| Поле | Что показывает | Когда важно |
|---|---|---|
Firmware |
Например: AM32_2.17 |
Перед обновлением — проверить актуальность |
Bootloader |
Версия начального загрузчика | Обновляется только через программатор |
MCU |
Формат структуры данных настроек EEPROM | При смене версии — выполнить сброс к заводским |
Telemetry |
Телеметрия. Напряжение, ток, температура, eRPM | Если не обновляется — отключить и включить питание на ESC повторно |
Типичные ошибки подключения
CP2102, CH340, FTDI. Установите драйвер и перезапустите конфигуратор.4. Основные параметры двигателя (Motor Settings)
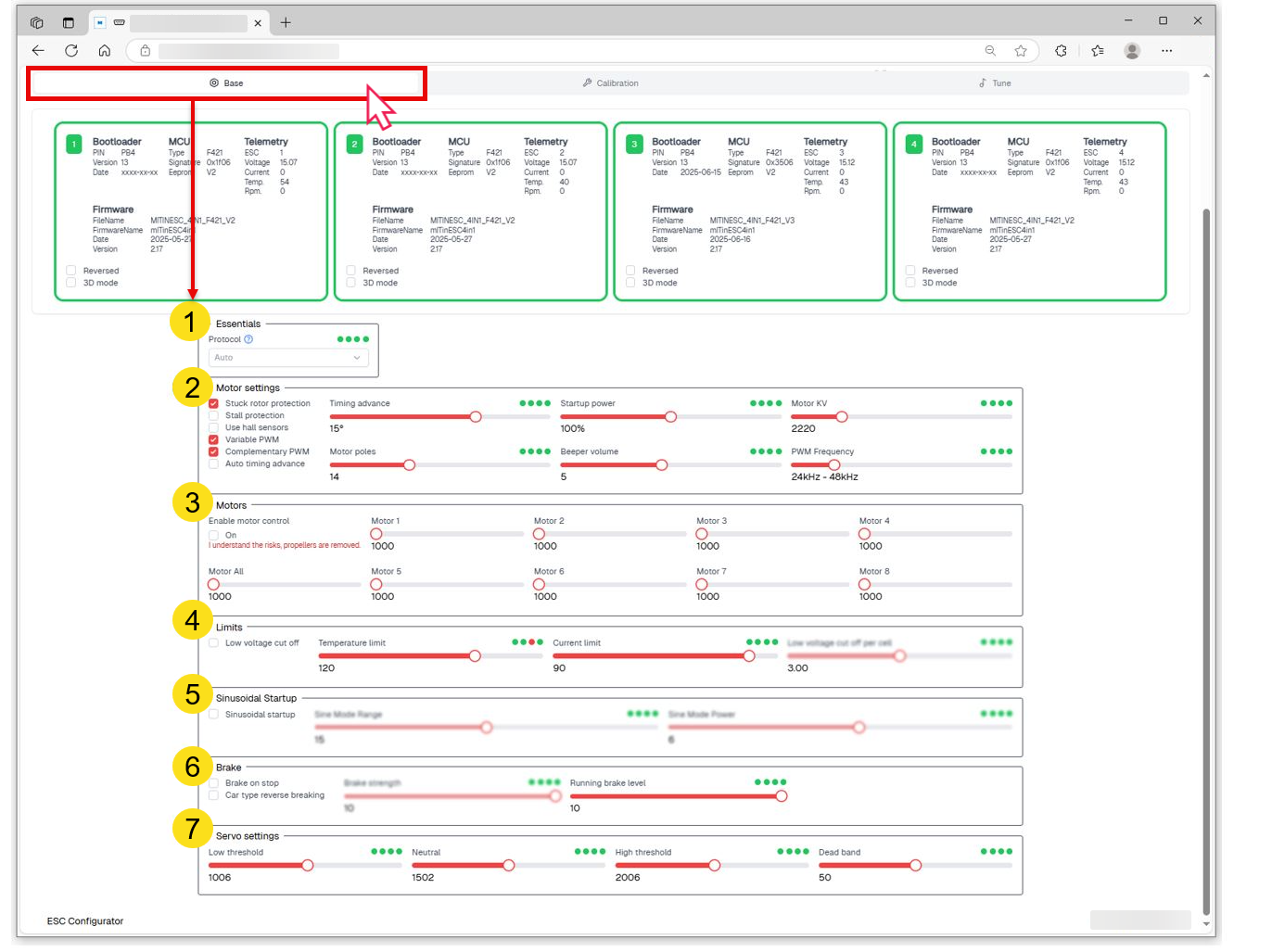
Essentials — протокол обмена
Параметр Essentials задаёт протокол связи FC → ESC. При значении auto ESC при включении прослушивает входной сигнал и автоматически определяет протокол. Это рекомендуемый вариант для большинства сборок.
Motor Settings — все параметры
| Параметр | По умолч. | Диапазон | Описание и рекомендация |
|---|---|---|---|
3D Mode |
Выкл. | Вкл / Выкл | Делит диапазон газа пополам: нижняя половина — вращение назад, верхняя — вперёд, центр — нейтраль. Используется в RC-краулерах и 3D-акробатике. Для стандартных мультироторов — отключить. |
Reverse Rotation |
Выкл. | Вкл / Выкл | Программная смена направления вращения без перепайки проводов фаз. Альтернатива: физически поменять местами любые два провода мотора. |
Stuck Rotor Protection |
Вкл. | Вкл / Выкл | При обнаружении заклинивания ротора ESC прекращает попытки запуска до возврата газа в ноль. Предотвращает перегрев обмоток. FPV-дроны — включить. Краулеры — отключить (иначе ESC прекратит попытки при преодолении препятствия). |
Stall Protection |
Выкл. | Вкл / Выкл | При внезапной остановке ротора ESC подаёт дополнительный импульс для возобновления вращения. Полезна для RC-краулеров на подъёмах. Для мультироторов — осторожно. |
Variable PWM |
Вкл. | Вкл / Выкл | Динамически изменяет частоту переключения MOSFET в зависимости от оборотов. На малых оборотах — ниже частота (меньше нагрев), на высоких — выше (точнее управление). Исключает интерференцию частоты ШИМ с частотой коммутации. Рекомендуется всегда включать. |
Complementary PWM |
Вкл. | Вкл / Выкл | При снижении газа нижний MOSFET открывается синхронно — создаётся рекуперативное торможение. Мотор быстро замедляется вместо выбега по инерции (freewheel). Критично для отзывчивости FPV-дронов. Всегда включать. |
Auto Timing Advance |
Вкл. | Вкл / Выкл | ESC автоматически подстраивает угол опережения коммутации. Параметр Timing Advance используется как базовое значение. Рекомендуется включать. |
Timing Advance |
2 (= 15°) | 1–7 (шаг 7,5°) | Угол опережения фаз. Значение 2 = 15° — баланс мощности и нагрева. Высокие значения (22–30°) дают больше мощности, но сильнее греют. Слишком высокое → риск десинхронизации (desync). |
Startup Power |
100% | 50–150%, шаг 5% | Мощность в течение первых нескольких коммутаций при старте из покоя. Не влияет на характеристики после раскрутки. Увеличивать только при проблемах с запуском тяжёлых пропеллеров. |
Motor KV |
2200 | 100–4000+ | Вводится реальное значение KV вашего мотора. ESC использует это значение для ограничения мощности на малых оборотах. Неверное значение может привести к снижению тяги или проблемам при старте. |
Motor Poles |
14 | Чётное число | Количество магнитных полюсов ротора. Большинство FPV-моторов — 14 (7 пар). Используется для расчёта скорости перехода из синусоидального режима в трапециевидный. Считайте магниты на роторе. |
Beep Volume |
5 | 0–11 | Громкость звуковых сигналов, издаваемых через мотор. 0 — отключить. Сигналы используются для идентификации готовности и поиска аппарата. |
PWM Frequency |
24 кГц | 16 / 24 / 48 / 96 кГц | Частота переключения MOSFET. Не путать с частотой протокола DShot и частотой PID-цикла FC. 24 кГц — баланс нагрева и управления. 48 кГц — плавнее, но MOSFET греются сильнее. |
Motors — Тестовый запуск двигателей
Интерфейс позволяет тестово запустить каждый мотор прямо из конфигуратора для проверки направления вращения и работоспособности.
Типичные ошибки настройки мотора
5. Защита, синусоидальный запуск и сервосигнал
Limits — защитные ограничения
Секция Limits защищает аккумулятор, ESC и мотор от работы за пределами допустимых электрических и тепловых параметров. Отключение защит допустимо только в диагностических целях на стенде.
| Параметр | По умолч. | Описание | Рекомендация |
|---|---|---|---|
Low Voltage Cut Off |
Вкл. | Включение защиты от глубокого разряда LiPo/Li-Ion | Всегда включать. Глубокий разряд необратимо деградирует ячейки. |
Low Voltage Cut Off Threshold |
3,3 В/ячейку | Пороговое напряжение, при котором ESC снижает мощность или останавливает мотор | LiPo: 3,3–3,5 В/ячейку. Ниже 3,0 В/ячейку — опасно. |
Temperature Limit |
80–100 °C | При превышении температуры MOSFET ESC снижает мощность для самозащиты | Устанавливать согласно datasheet конкретного ESC. Типично 80 °C. |
Current Limit |
0 (выкл.) | Максимальный ток мотора. Не все ESC имеют точный аппаратный датчик тока. | При отсутствии точного датчика — оставить выключенным во избежание ложных срабатываний. |
Sinusoidal Startup — синусоидальный запуск
В стандартном режиме ESC определяет положение ротора по Back-EMF. На очень малых оборотах Back-EMF слишком мал для надёжного определения положения ротора, что приводит к рывкам или отказу старта. Синусоидальный режим решает это: вместо ступенчатого переключения фаз ESC формирует плавную синусоидальную форму напряжения, обеспечивая стабильный крутящий момент с нуля.
| Параметр | По умолч. | Диапазон | Описание |
|---|---|---|---|
Sinusoidal Startup |
Выкл. | Вкл / Выкл | Включить для тяжёлых пропеллеров и высокой инерции ротора. Для лёгких FPV-пропеллеров — не нужен. |
Sine Mode Range |
25 | 1–50 | Диапазон оборотов синусоидального режима. Меньше → переход на трапецию раньше (ниже обороты). |
Sine Mode Power |
5 | 1–10 | Регулировать осторожно! Высокие значения сильно нагревают ESC и мотор. Начинать с минимума. |
Brake — торможение при сбросе газа
При включённом Brake on Stop ESC активно тормозит мотор при нулевом газе — подаёт тормозной ток на обмотки. При отключённом — мотор выбегает по инерции (freewheel). Для FPV-квадрокоптеров торможение критично: без него аппарат медленно реагирует на резкий сброс газа. Для крейсерских платформ можно отключить для снижения нагрева ESC.
Servo Settings — настройки сервосигнала
Servo Settings применяются только при аналоговом сигнале (PWM, Oneshot, Multishot). При работе с DShot эти настройки полностью игнорируются.| Параметр | По умолч. | Формула | Описание |
|---|---|---|---|
Low Threshold |
128 | (знач × 2) + 750 мкс |
Нижний порог PWM. 128 → 1006 мкс. Ниже порога — нулевой газ. |
High Threshold |
128 | (знач × 2) + 1750 мкс |
Верхний порог PWM. 128 → 2006 мкс. Выше порога — 100% газа. |
Neutral |
128 | 1374 + знач мкс |
Нейтраль. 128 → 1502 мкс. Центральная точка для 3D Mode. |
Dead Band |
5 | 0–100 | Мёртвая зона вокруг нейтрали. В этой зоне ESC не подаёт питание на мотор. Предотвращает дрожание при дрейфе радиосигнала. |
Калибровка датчиков
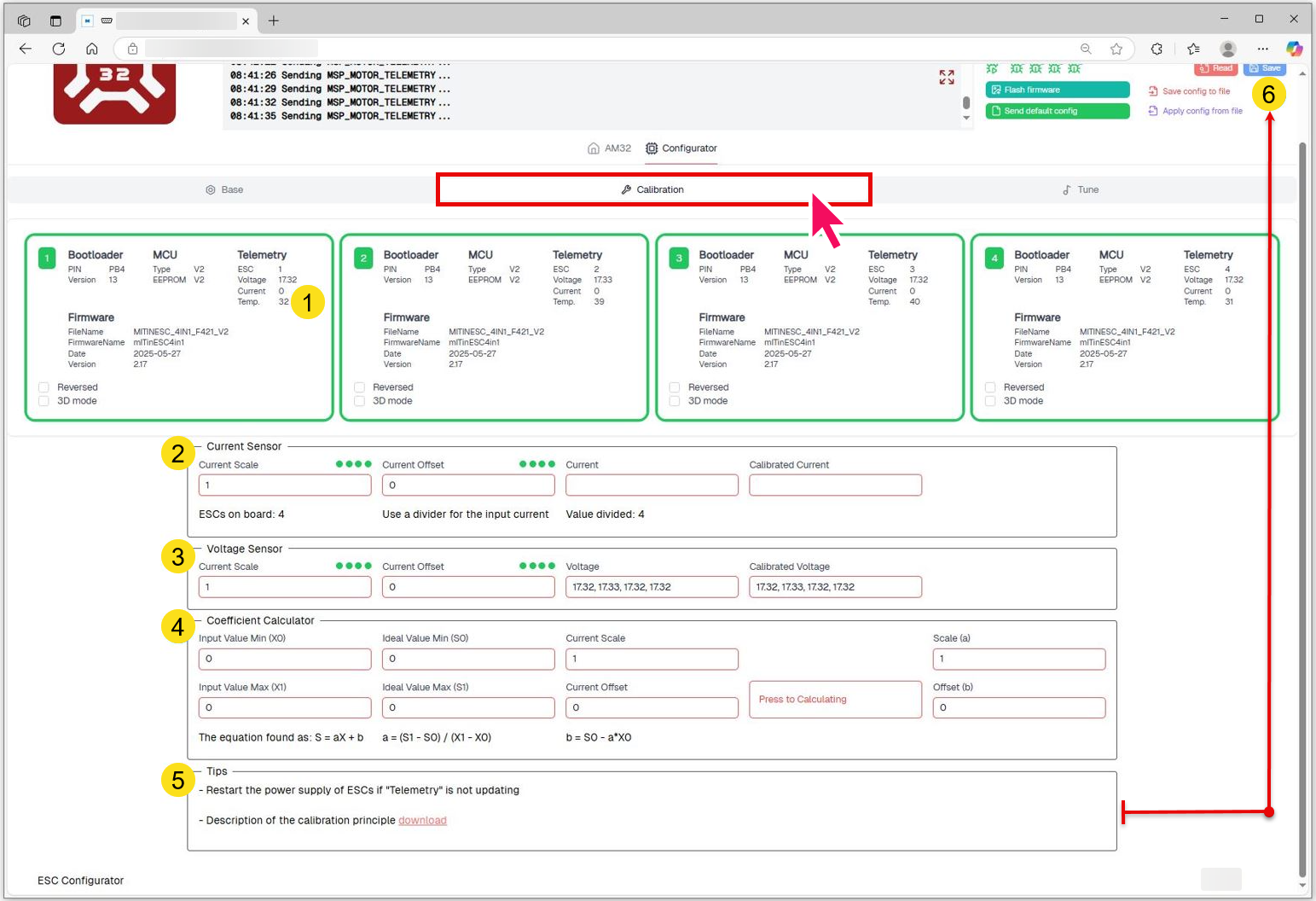
Секция Calibration содержит инструменты точной настройки датчиков тока и напряжения. Без калибровки показания телеметрии могут значительно отличаться от реальных значений.
| Инструмент | Назначение |
|---|---|
Current Sensor |
Калибровка коэффициентов шунтового резистора и усилителя тока. Компенсирует погрешность компонентов. |
Voltage Sensor |
Калибровка делителя напряжения. Эталон — мультиметр на аккумуляторе. |
Coefficient Calculator |
Встроенный калькулятор: введите эталонное значение → нажмите Calculate → Save. |
Save — зелёным. Не отключайте питание до смены цвета на зелёный.Типичные ошибки
6. Прошивка, сброс и резервное копирование
Обновление прошивки (Flash Firmware)
Обновление прошивки исправляет ошибки, добавляет новые функции и улучшает производительность. Рекомендуется проверять наличие обновлений перед каждым ответственным применением аппарата.
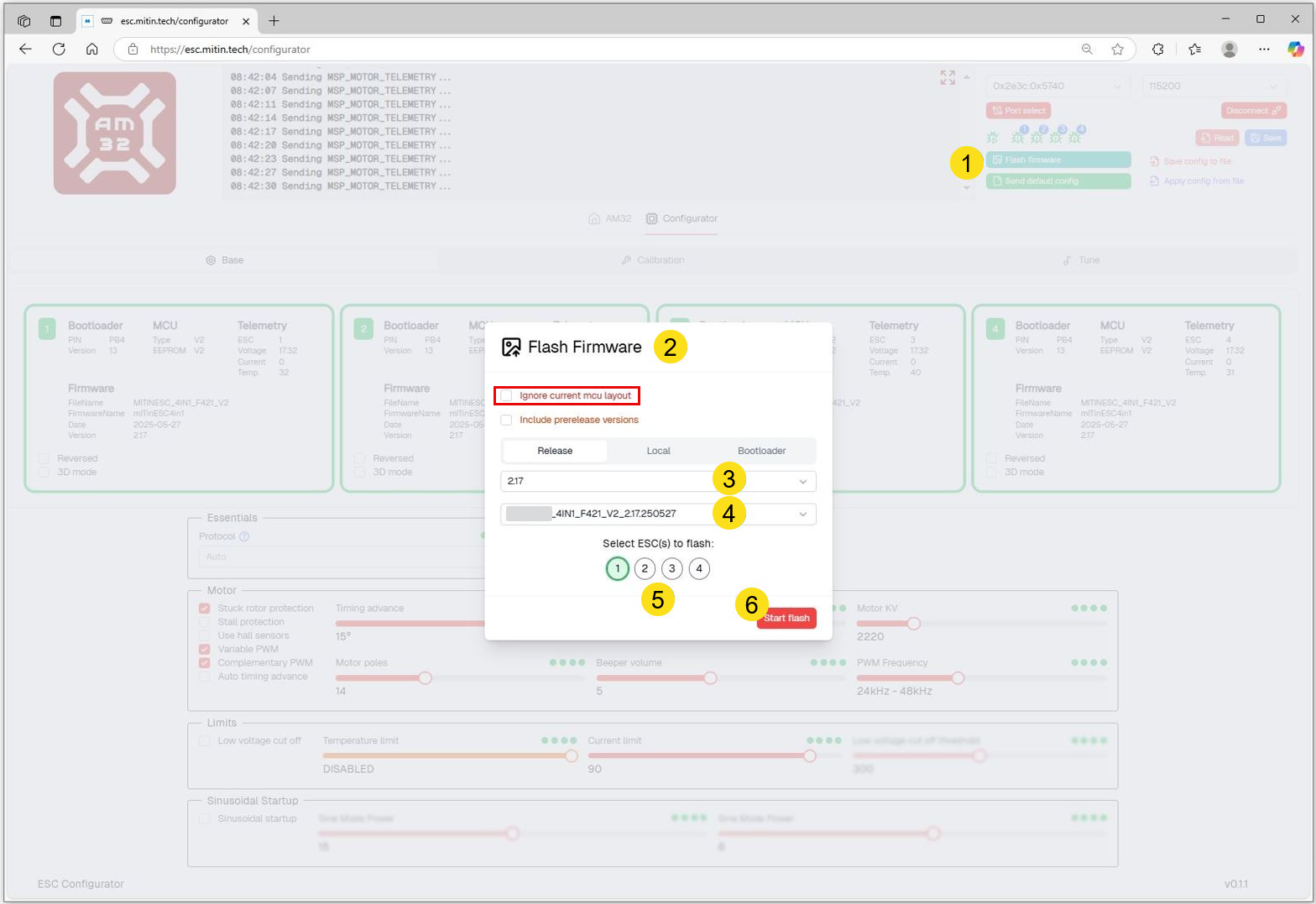
- Нажмите «Flash Firmware» — откроется окно обновления.
- Отобразится текущая версия прошивки.
- Выберите нужную версию прошивки из списка. Если ESC не определяется автоматически, можно поставить галочку «Ignore current MCU layout», найти ESC вручную и продолжить прошивку.
- Отметьте галочками те ESC, которые нужно прошить.
- Нажмите «Start Flash» для запуска.
- При необходимости можно загрузить файл прошивки с локального компьютера.
Первичная прошивка через программатор
Для установки AM32 на «чистый» ESC сначала необходимо установить загрузчик / bootloader через программатор ST-LINK, GD-LINK, CMSIS-DAP или AT-LINK. bootloaders
После установки загрузчика можно установить основную прошивку либо с помощью инструментов для настройки и полетного контроллера Betaflight (Passthrough), либо напрямую, подключив USB-адаптер с последовательным интерфейсом (one wire).
| Микроконтроллер ESC | Программатор | ПО |
|---|---|---|
STM32F051 / STM32G071 |
ST-LINK V2 | STM32CubeProgrammer |
GD32E230 |
GD-LINK | GD32 All-In-One Programmer |
AT32F415 / AT32F421 |
AT-LINK / CMSIS-DAP | AT32 ICP Programmer |
Сброс настроек (Send Default Config)
Возвращает все параметры к заводским значениям. Обязательно выполнять при изменении версии EEPROM или при необходимости начать настройку с нуля.
| Параметр | Заводское значение | Примечание |
|---|---|---|
Complementary PWM |
Вкл. | Активное торможение |
Variable PWM |
Вкл. | Динамическая частота ШИМ |
Stuck Rotor Protection |
Вкл. | Защита от заклинивания |
Timing Advance |
2 (= 15°) | Шаг 7,5° |
PWM Frequency |
24 кГц | Частота MOSFET |
Startup Power |
100% | Мощность первых коммутаций |
Motor KV |
2200 | Усредненное значение |
Motor Poles |
14 | Полюсов ротора |
Brake on Stop |
Вкл. | Торможение при нуле газа |
Stall Protection |
Выкл. | Для краулеров — включить |
Sinusoidal Startup |
Выкл. | Для тяжёлых пропеллеров — включить |
Low Voltage Cut Off |
Вкл. | Защита батареи — не отключать |
Beep Volume |
5 | Диапазон 0–11 |
Сохранение и загрузка конфигурации
Типичные ошибки
Save config to file до начала обновления.7. Практика: типовые задачи (с решениями)
Диагностика и первичная настройка
Задача 1: Определение параметров мотора по маркировке
Мотор имеет маркировку 2306 2450KV и 14 магнитов на роторе. Определите, какие значения ввести в конфигураторе AM32.
Задача 2: Расчёт порогов сервосигнала
Передатчик выдаёт сигнал 1020–1980 мкс. Рассчитайте значения Low Threshold и High Threshold для конфигуратора.
Задача 3: Диагностика — телеметрия не обновляется
После нажатия Read все параметры считались успешно, но поля телеметрии (напряжение, ток, температура) показывают нули и не обновляются. Определите причину и последовательность действий.
Продвинутые сценарии
Задача 4: Подбор настроек для крупного БПЛА с тяжёлыми пропеллерами
БПЛА с моторами 4114 400KV, 6S батарея, пропеллеры 15 дюймов, 12 полюсов. Мотор при стандартных настройках иногда не запускается с первой попытки (рывок, затем остановка). Предложите конфигурацию ESC.
Задача 5: Восстановление ESC после неудачной прошивки
Во время обновления прошивки питание было кратковременно прервано. ESC больше не определяется конфигуратором через Passthrough. Опишите последовательность восстановления.
8. Чек‑лист самопроверки знаний
Отметьте пункты, которые вы действительно понимаете и можете применить без подсказок. Рекомендуется заполнять после первой самостоятельной настройки реального аппарата.
| ✓ | Навык / Знание | Проверка |
|---|---|---|
| Знаю разницу между аналоговым PWM и цифровым DShot | Могу объяснить, почему DShot не требует калибровки, и описать структуру пакета | |
| Умею подключить ESC к ПК через Passthrough | Могу выбрать COM-порт, нажать Connect и получить Read без ошибок | |
| Понимаю назначение Timing Advance | Могу объяснить, что произойдёт при значении 1 и при значении 7, и рассчитать угол в градусах | |
| Правильно устанавливаю Motor KV и Motor Poles | Могу найти параметры на моторе и ввести их в конфигуратор без ошибок | |
| Знаю, зачем нужен Complementary PWM | Могу объяснить разницу между freewheel и active braking и их влияние на управление | |
| Понимаю защиты Low Voltage Cut Off и Temperature Limit | Могу объяснить, что происходит с LiPo при разряде ниже 3,0 В/ячейку | |
| Знаю, когда и зачем использовать Sinusoidal Startup | Могу объяснить, почему на малых оборотах Back-EMF недостаточен, и настроить режим для тяжёлых пропеллеров | |
| Умею обновлять прошивку ESC | Могу провести полный цикл: сохранить конфиг → Flash → Default Config → восстановить конфиг | |
| Умею восстанавливать ESC через программатор | Знаю, какой программатор нужен для STM32 / GD32 / AT32 и как записать bootloader | |
| Умею создавать и восстанавливать резервные копии конфигурации | Могу сохранить .json, назвать файл с датой и моделью, загрузить на другой ESC с проверкой совместимости | |
| Знаю 3D Mode и Reverse Rotation и их различие | Могу объяснить, когда применять 3D Mode, и чем он отличается от простого реверса | |
| Умею читать телеметрию ESC и диагностировать по ней проблемы | Могу по показаниям температуры, тока и eRPM определить, нормально ли работает мотор |
- Вторник, 16 июня 2026