
Если дрон не армится. Бинд есть, арма нет!
24 августа 2025
Технику БПЛА
Вы сделали все:
- Собрали дрон
- Произвели Bind приемника на дроне с передатчиком в пульте управления
- Увидели, что во вкладке Приемник [Betaflight] первые четыре канала реагируют на движение стиков
- При переклюдении тумблера пульта управления назначеного на Arm, происходит переключение состояния диапазона Режима ARM во вкладке Режимы [Betaflight]
- Но дрон не получается заармить....
1. Проверьте индикаторы
Проверьте индикаторы на приёмнике — должен гореть стабильный светодиод после бинда. Убедитесь через интерфейс полётного контроллера (например, Betaflight), что каналы с пульта обновляются. Проверьте, что RX находится в режиме биндинга и используется правильный протокол.
Определить это можно по цвету индикатора на приёмнике и передатчике. Убедитесь, что на обоих устройствах одновременно горит индикатор одного цвета:
- TBS: RX — зелёный, ТХ — зелёный.
- ELRS: RX — зелёный или красный в зависимости от модели приёмника. ТХ — также одноцветный в зависимости от модели и производителя.
Если индикатор на одном из устройств горит стабильно, например, на приёмнике, а на передатчике нет, то возможны две причины:
-
Приёмник сопряжён с другим передатчиком, который находится рядом и включён.
-
Приёмник ELRS находится в режиме загрузчика. Это может произойти из-за сбоя в работе приёмника, например, из-за неправильной прошивки, сбоя во время прошивки или короткого замыкания.
(Ищем информацию о том, как разблокировать RX)
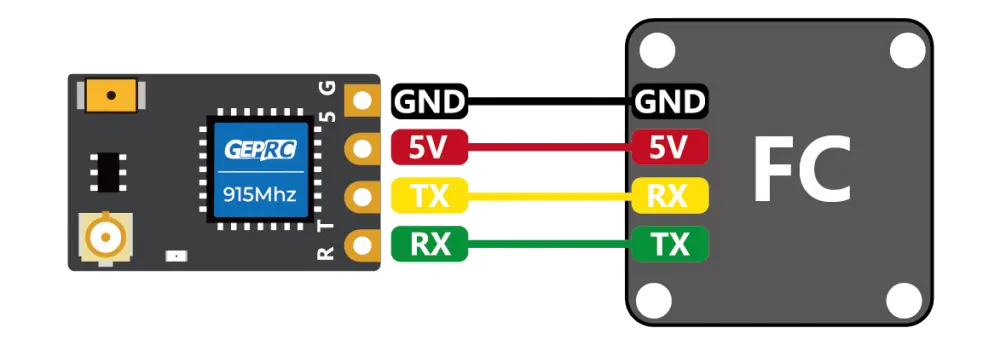
2. Физически нарушена передача данных между RX и FC
При использовании UART убедитесь в правильном подключении TX/RX, совпадении baud rate. Если используются PWM или PPM — проверьте кабели и настройки. Возможно, сигнал не доходит до FC.
Здесь мы должны помнить о том, что для бинда достаточно лишь подать питание (черный / красный), два оставшихся контакта отвечают за передачу информации от приёмника и на него.
Информацию от FC мы можем не получать. В старых приёмниках так передавались данные телеметрии. Сейчас в этом нет необходимости. Зеленый провод не обязателен.
3. Газ [Throttle] не в нижнем положении
Многие прошивки требуют, чтобы стик газа был полностью внизу перед Arming'ом. Проверьте значение канала Throttle (в данном случае канал CH3) во вкладке Reciever / Приемник в Betafight — должно быть около 1000 мкс.

В вашем случае канал может быть другой, убедитесь, что выбранный вами канал действительно отвечает за Throttle.
Также индикатором того что флаг сработал и борт запрещает вам Arm будет надпись на вкладке Система - Информация о системе - Флаги запрещающие Arming. (Betaflight)
ПО ИДЕЕ С ЭТОГО НАДО НАЧИНАТЬ - ОЗНАКОМТЕСЬ В ЗАПРЕЩАЮЩИМИ ФЛАГАМИ.
На флаги CLI и MSP не обращайте внимания - Арма не будет, пока подключен компьютер и вы находитесь в режиме Командной строки (CLI)
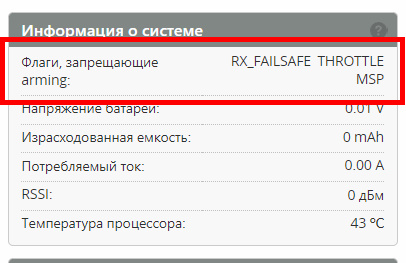
В приведенном примере активирован FAILSAFE и стик ГАЗ находится не в нижнем положении.
4. Не назначен AUX на ARM в полётном контроллере
В Betaflight / INAV необходимо назначить AUX-канал как триггер для Arming.
Это делается в разделе Configuration / Конфигурация → Modes / Режимы.

5. Разные таблицы каналов AETR - TAER
Убедитесь, что порядок каналов (AETR, TAER и др.) одинаковый на стороне TX и RX. Т.е. настройки EDGETX в пульте управления соответвуют тому, что вы прошили в контроллер через Betaflight. Несоответствие может привести к некорректной работе стиков и невозможности Arming.
По умолчанию на пультах Radiomaster - стоит AETR1234, на TBS Tango II - TAER1234. На дронах ВТ-40/ПВХ по умолчанию TAER1234. На большинстве остальных - AETR1234. На вашем дроне должна быть та же таблица как и в модели пульта, в ином случае происходит ситуация когда, например, физически на пульте Газ(Throttle) - левая вертикаль, а дрон "думает", что это правая горизонталь -> срабатывает флаг запрещающий Arm (не в нижнем положении Газа).
Для того что бы исправить это можно сделать одно из следующего:
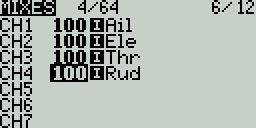
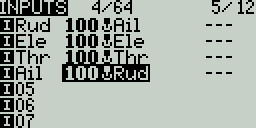
- Зайти в используемую вами модель в пульте на страницы Inputs и Mixes и вручную изменить очередность первых 4х каналов (либо создать вторую модель для быстрого переключения между ними).
- Для AETR1234 - 1) Ail 2) Еlе 3) Thr 4) Rud
 |
 |
- Для TAER1234 - 1) Thr 2) Ail 3) Ele 4) Rud
- Зайти в BetaFlight (INAV), во вкладку Приёмник и изменить значение здесь. Либо вручную, либо из предложенных вариантов.
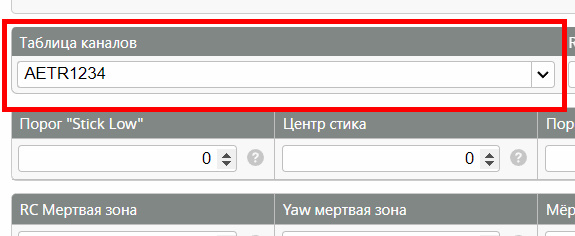
Не забудьте сохранить изменения и здесь же вы сможете проверить, правильно ли дрон выполняет ваши команды.
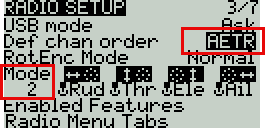
- Зайти в меню System пульта на страницу Radio Setup, проверить таблицу здесь и обязательно убедиться, должен стоять Mode 2.
6. Не правильная настройка модели в пульте
AUX-каналы (переключатели) должны быть корректно назначены в Inputs или Mixes. Проверьте в меню Test пульта — переключатели должны отображать движение по соответствующему каналу.
7. Выбран неверный протокол работы TX и/или RX
Протоколы работы передатчика и приёмника должны совпадать: SBUS, CRSF, FPort, D8, ELRS и т.д.
Т.е. передатчик ELRS на пульте управления не будет работать с приемником TBS на борту дрона.
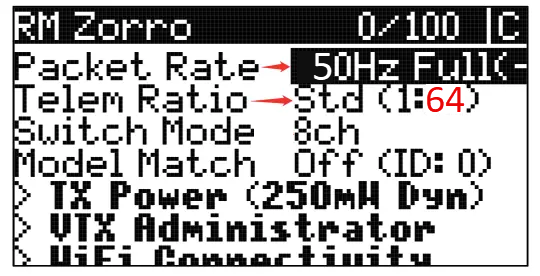
8. Если у Вас ELRS передатчик, проверьте Packet Rate и Telemetry Ratio
Слишком высокий Packet Rate (частота пакетов) или слишком частая отправка телеметрии может вызывать ошибки. Рекомендуется:
- Packet Rate: 50Hz
- Telemetry Ratio: 1:64
9. Проверьте, не раздает ли ваш передатчик или приёмник Wi-Fi
Если ваш приёмник ELRS мигает очень быстро любым из цветов - он раздает Wi-Fi для подключения к внутренней странице устройства.
По умолчанию в передатчиках и приёмниках ELRS стоит таймер на 60 секунд (его можно изменить, может быть установлено другое время), если бинд по тем или иным причинам за это время не происходит - автоматически начинает работать Wi-Fi модуль, он может мешать дальнейшему сопряжению устройств до тех пор пока вы не сбросите таймер (например, сняв питание и подав его заново).
Некоторые устройства (DJI FPV, камеры, VTX) могут создавать точки доступа Wi-Fi, которые мешают работе ELRS. Отключите всё лишнее и проверьте окружение на наличие Wi-Fi-сетей.
10. Включен Motor Stop или не выбран протокол работы моторов
В Betaflight во вкладке Моторы может быть включён флаг MOTOR_STOP, который блокирует моторы. Также нужно выбрать тип сигнала ESC: DSHOT, PWM, ONESHOT и т.д.
11. Флаги запрещающие Arm
Некоторые флаги в Betaflight (PREARM, FAILSAFE, RUNTIME_ERRORS) могут блокировать Arming. Проверьте командой status в CLI или через логи в интерфейсе.
| RXLOSS RX Failsafe |
Отсутствуют данные с приёмника управления |
| Throttle | Газ не в самом нижнем положении |
| Angle | Превышен угол наклона (особенности режима Angle) |
| MSP | Подключен BetaFlight Configurator |
| NO GYRO | Не обнаружен Гироскоп |
| FailSafe | Активирован FailSafe |
| NO ACC CAL | Акселерометр не откалиброван |
| MOTOR PROTO | ESC или протокол работы моторов не настроен |
| NO PREARM | Не активирован AUX который отвечает за РгеАrm (тумблер "предохранитель" активирован) |
12. Нарушено соединение ESC с FC
Проверьте подключение ESC к FC: нет ли плохого контакта, повреждений платы, перепутанных проводов. Для BLHELI_32 ESC можно использовать BLHELI Suite для диагностики.
13. Включена функция Prearm
В Betaflight может быть активирована опция Prearm (защита от случайного запуска моторов) — она требует дополнительного подтверждения перед Arming'ом. Проверьте в CLI командой get prearm.
Пока вы не снимите запрет и не поставите назначенный AUX в нужное положение - моторы не заведутся.
14. Физическая проблема с пультом управления
Неисправный стик или переключатель может давать неверные значения AUX-канала который вы назначаете на Arm. Очень редка ситуация при которой кнопка залипает и практически моментально после нажатия тут же дает команду на Disarm и моторы не успевают исполнить команду. Проверить это можно также во вкладке Приёмник в BetaFlight
15. И то к чему вы должны прийти только после часов проверок
Только после исчерпывающей проверки всех вышеуказанных пунктов стоит искать редкие или аппаратные проблемы. Иногда дело оказывается в "банальном" — например, газ немного не внизу или AUX зависает.

Внешние URLs:
11684
Похожее в категории "СОФТ"
Добавить комментарий