



Настройка Rates в Betaflight 4.5. Часть 3. PID для взрослых.
Внимание: приведённая информация актуальна для Betaflight 4.5.x. В других версиях названия пунктов меню, диапазоны значений и поведение отдельных опций могут отличаться.
Данный материал посвящён настройке рейтов (Rates), а также взаимодействию с RC‑фильтрацией / RC‑сглаживанием (RC filtering / RC smoothing). Содержательный смысл этих параметров имеет прямое практическое выражение: рейты определяют, каким образом полётный контроллер интерпретирует перемещение стиков и преобразует его в управляющие команды для квадрокоптера. Следовательно, рейты напрямую формируют восприятие управления («stick feel») — то есть степень точности, предсказуемости и плавности реакции аппарата на действия пилота.
Место в серии материалов. Общая последовательность: фильтры (Filters) → настройка PID (PID tuning) → рейты (данный раздел). Если PID‑контроллер сконфигурирован корректно, расхождение между целевым значением (setpoint) и фактическим движением обычно невелико. В таком случае именно рейты и RC‑сглаживание начинают определять, насколько характер полёта соответствует ожиданиям пилота.
Глоссарий существенных терминов
- Rates (рейты) — параметры, определяющие, как перемещение стика преобразуется в команду угловой скорости вращения квадрокоптера, а также максимальную скорость вращения при заданном отклонении стика.
- Stick feel (ощущение стика) — субъективное восприятие реакции аппарата, характеризующееся точностью, предсказуемостью и плавностью отклика на мелкие и резкие движения стиков, что позволяет пилоту уверенно контролировать положение и траекторию.
- RC command (RC‑команда) — сигнал, поступающий от приёмника (receiver) и кодирующий положение стиков и состояние переключателей для дальнейшей обработки полётным контроллером.
- RC filtering / RC smoothing (RC‑фильтрация / RC‑сглаживание) — фильтрация входного сигнала стиков, предназначенная для подавления тремора пальцев, мелкого джиттера гимальных датчиков и случайных микроперемещений, что обеспечивает формирование плавного целевого значения (setpoint).
- Setpoint (уставка, целевое значение) — величина, которую Betaflight интерпретирует как намерение пилота: команда на требуемую угловую скорость вращения квадрокоптера по каждой из осей.
- PID controller (PID‑контроллер) — замкнутый контур управления, который стремится привести фактическое движение квадрокоптера в соответствие с заданным setpoint, минимизируя рассогласование между желаемым и реальным поведением.
- Rate Profile Settings (настройки профиля рейтов) — раздел конфигуратора Betaflight (обычно вкладка PID Tuning), содержащий параметры рейтов, включая чувствительность в центре (center sensitivity), максимальную скорость вращения (max rate) и экспоненту (expo).
- Receiver tab (вкладка Receiver) — раздел Betaflight Configurator, в котором, помимо прочего, расположены настройки RC smoothing.
- Throttle (газ) — управляющий канал, определяющий уровень тяги и непосредственно влияющий на удержание высоты, что особенно критично при полётах вблизи земли и препятствий.
- Throttle limit scale (лимит газа масштабированием) — метод пропорционального сжатия диапазона газа: полный ход стика соответствует значению газа менее 100 % в Betaflight, при этом разрешение (детализация) в используемом диапазоне увеличивается.
- Throttle limit clip (лимит газа отсечкой) — способ ограничения газа, при котором любое отклонение стика выше заданного порога не приводит к дальнейшему увеличению сигнала газа — верхняя часть хода стика становится нечувствительной.
- Throttle expo (экспонента газа) — параметр, изменяющий форму кривой газа, «уплощая» выбранную область хода стика и обеспечивая повышенное разрешение в этой зоне.
- Throttle mid (середина газа) — параметр, задающий положение (в процентах хода стика), где располагается центр «уплощённой» области, формируемой throttle expo.
- Center sensitivity (чувствительность в центре) — характеристика, определяющая интенсивность реакции квадрокоптера на малые отклонения стика от нейтрального положения.
- Max rate (максимальная скорость вращения) — угловая скорость (в градусах в секунду), которую квадрокоптер достигает при полном отклонении стика по соответствующей оси.
- Expo (экспонента) — параметр, задающий форму кривой отклика между центральной областью и крайним положением стика, позволяющий смягчить реакцию в центре или скорректировать характер управления на средних отклонениях.
- Actual Rates (Actual rates) — модель рейтов, используемая как стандартный вариант в Betaflight 4.5 в рамках рассматриваемой методологии.
Содержание
- 1. Расположение рейтов и RC‑сглаживания в потоке управления Betaflight
- 2. Throttle: настройки, оказывающие наибольшее влияние на контроль высоты
- 2.1. Throttle limit scale: повышение разрешения без потери возможности контроллера использовать полную мощность
- 2.2. Throttle limit clip: причины, по которым данная опция обычно не рекомендуется
- 2.3. Throttle expo и throttle mid: формирование «уплощённой» области в требуемой зоне газа
- 2.4. Причины повышенной ценности throttle scale и throttle expo при использовании мощных моторов
- 3. RC smoothing: формирование плавного целевого значения (setpoint)
- 4. Rates: чувствительность в центре (center sensitivity), максимальная скорость вращения (max rate) и экспонента (expo) в модели Actual rates
- 4.1. Фактическое влияние рейтов на характер управления
- 4.2. Center sensitivity: обеспечение точности без зоны нечувствительности
- 4.3. Max rate: угловая скорость при полном отклонении стика
- 4.4. Expo: управление формой кривой отклика между центром и краем хода стика
- 4.5. Методика подбора max rate: предпочтительность начального занижения
- 5. Чек-лист усвоения материала (таблица)
1. Расположение рейтов и RC‑сглаживания в потоке управления Betaflight
1.1. Путь сигнала: стики → setpoint → PID → моторы
Перед началом настройки рейтов и RC‑сглаживания целесообразно рассмотреть их место в общей схеме управления. Процесс начинается с перемещения стика. Положение стика формирует входной сигнал, который передаётся по радиоканалу. Приёмник (receiver) передаёт этот сигнал в полётный контроллер, где внутри его прошивки Betaflight к RC‑команде применяются рейты (rates) и RC‑фильтрация / RC‑сглаживание (RC filtering / RC smoothing). Результатом обработки является целевое значение (setpoint).

Setpoint представляет собой величину, которую Betaflight интерпретирует как требуемое угловое ускорение или скорость вращения, то есть как намерение пилота. Далее вступает в работу PID‑контроллер, который стремится обеспечить соответствие фактического движения квадрокоптера заданному setpoint. При корректной настройке PID‑контура рассогласование между реальным движением и setpoint обычно невелико, и основным источником «неприятного» характера управления становится именно некорректный setpoint, формируемый настройками рейтов и сглаживания.
Стики → Радиопередатчик → Приёмник → Betaflight: рейты + RC smoothing → Setpoint → PID → Микшер → МоторыОтсюда следует практический вывод: рейты и RC‑сглаживание непосредственно формируют восприятие управления, поскольку они определяют, какой именно setpoint формируется даже при минимальном отклонении стика.
1.2. Местоположение настроек в Betaflight Configurator
Большинство рассматриваемых параметров находится в конфигураторе Betaflight в разделе PID Tuning, на вкладке, относящейся к Rateprofile settings. Настройки RC smoothing расположены отдельно — в разделе Receiver.
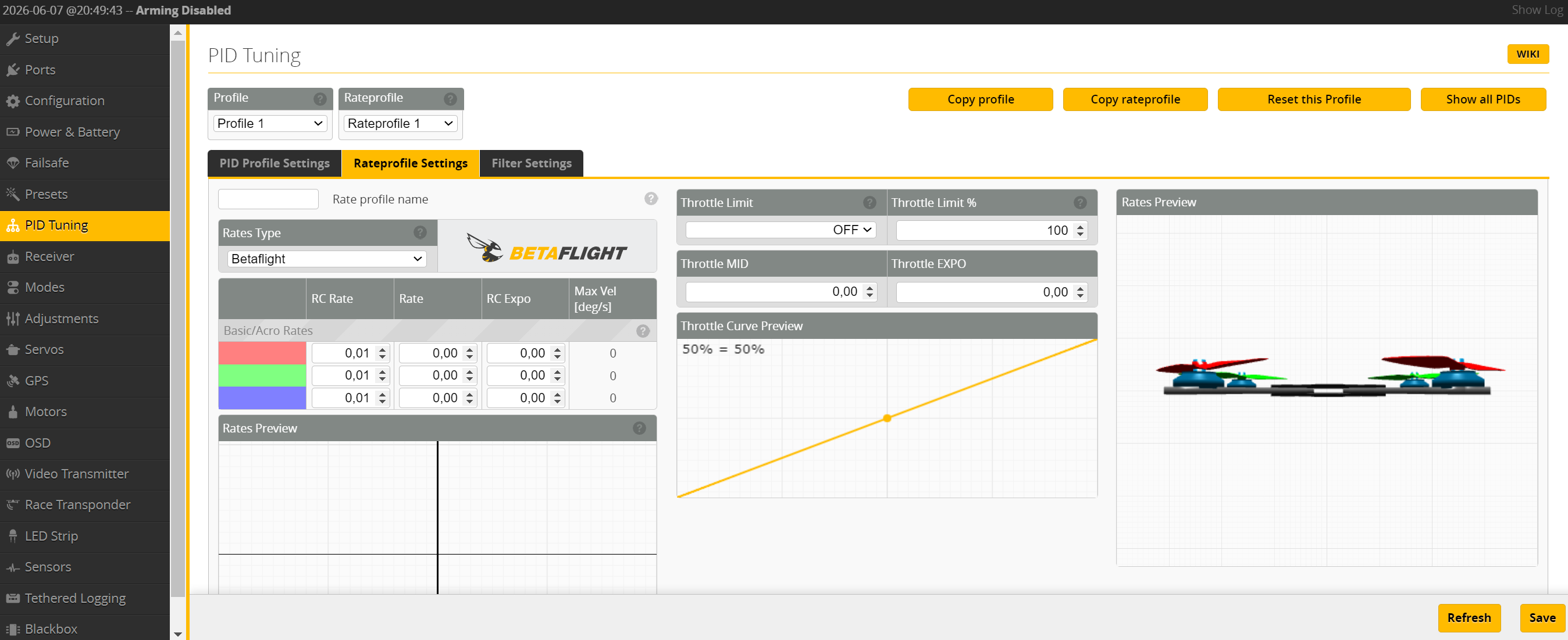
Вкладка PID Tuning → Rate profile settings (расположение рейтов и связанных параметров)
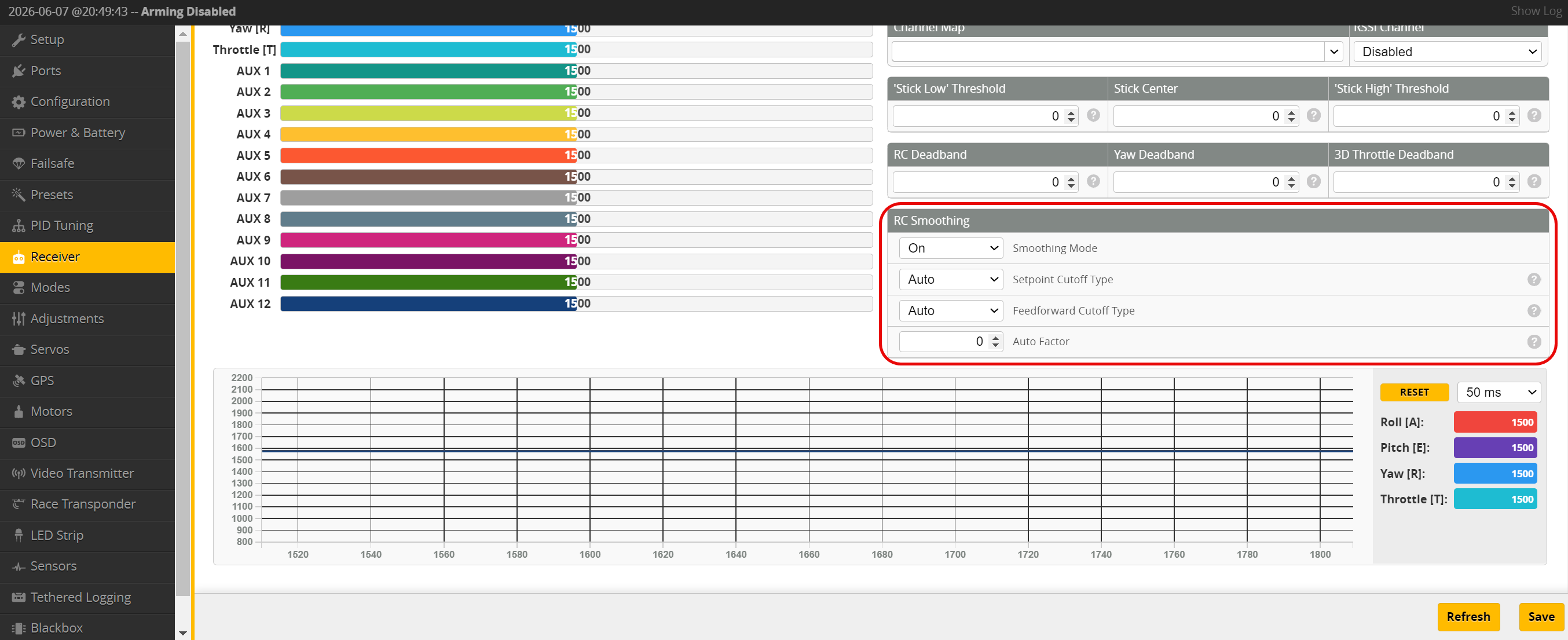
Receiver → RC smoothing (нижняя правая область, блок сглаживания)
↑ К оглавлению2. Throttle: настройки, оказывающие наибольшее влияние на контроль высоты
Прежде чем перейти непосредственно к рейтам, целесообразно рассмотреть настройки газа (throttle). Throttle является одним из важнейших каналов управления, непосредственно отвечающим за контроль высоты. При полётах вблизи объектов и земли точность управления газом становится не дополнительным удобством, а основой уверенности: пилот должен иметь возможность удерживать высоту с высокой степенью точности, не полагаясь на интуитивное угадывание величины перелёта при малейшем движении пальца.
2.1. Throttle limit scale: повышение точности управления газом без потери возможности контроллера использовать полную мощность
Первый параметр — throttle limit SCALE (масштаб ограничения газа). Его значимость возрастает по мере увеличения мощности моторов. Throttle limit scale пропорционально масштабирует сигнал газа с нижнего положения стика: положение «полный газ» на стике при этом соответствует значению менее чем 100 % внутри прошивки Betaflight.
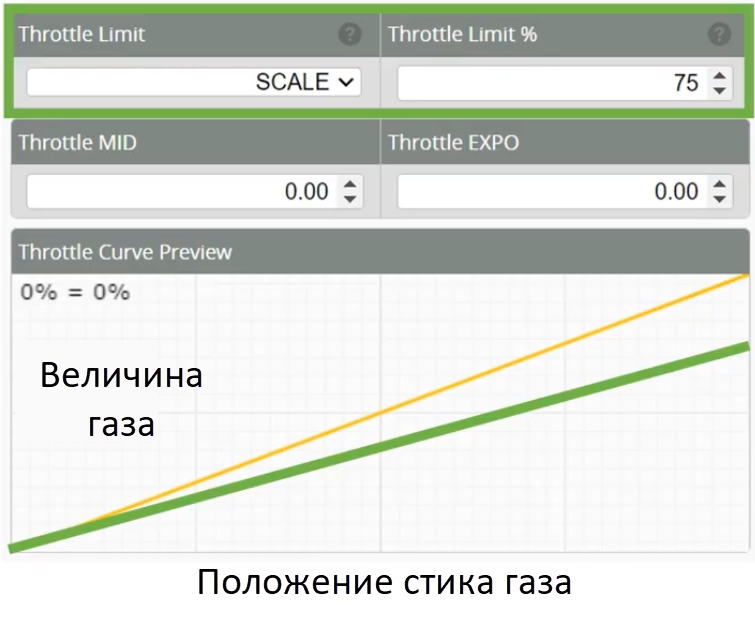
Это обеспечивает желаемый эффект: пилот жертвует частью верхнего диапазона, но получает повышенное разрешение (resolution) в том диапазоне, который реально использует наиболее часто. Например, если пилот практически никогда не достигает полного газа, а максимальное используемое значение составляет 75–80 % от максимума, то throttle limit scale становится рациональным инструментом, поскольку в настройках прошивки можно установить максимум - 80 %, после чего весь реально рабочий диапазон становится более детализированным и управляемым.
Идея масштабирования в формализованном виде:
$$Throttle_{BF} = Throttle_{stick}\cdot Scale$$
Данное выражение не является вмешательством во внутренние алгоритмы прошивки, а описывает понятную трансформацию: весь ход стика отображается в более детализированную область в пределах фактически используемого диапазона.
Часто задаваемый вопрос: «Не приводит ли ограничение газа к потере мощности мотора?» Ответ в рамках данной методологии однозначен: нет, мощность как ресурс управления не теряется. Throttle limit scale влияет на входной сигнал стика, но полётный контроллер по-прежнему может потребовать от моторов полной мощности, если это необходимо для выполнения манёвра или стабилизации.
Это легко проиллюстрировать на примерах. При выполнении резкого разворота, быстрого флипа, интенсивного вращения по рысканью (yaw‑spin) или иного энергичного манёвра полётный контроллер может отправить отдельным моторам команду на 100 % тяги, чтобы обеспечить требуемый отклик по setpoint и сохранить стабильность. Throttle limit scale не лишает контроллер возможности использовать полную мощность. Он лишь делает ручной диапазон газа более управляемым.
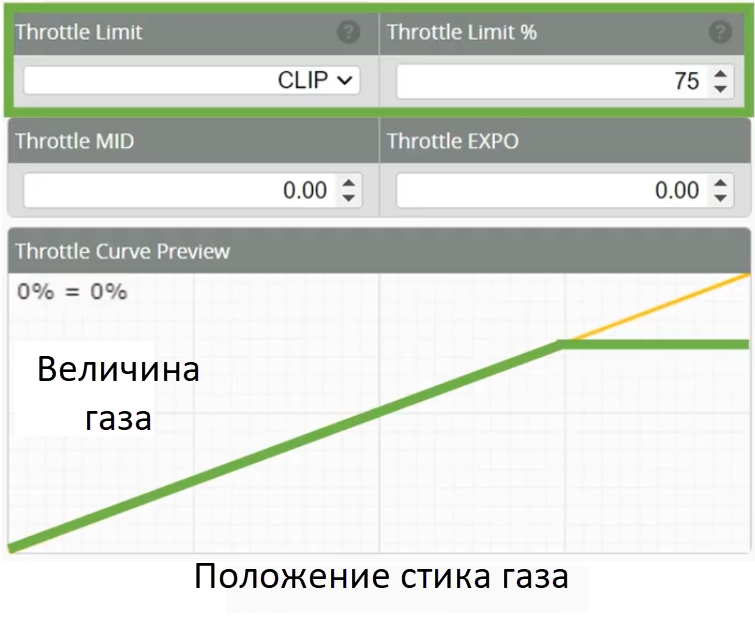
2.2. Throttle limit clip: причины, по которым данная опция обычно не рекомендуется
Второй тип лимита — throttle limit clip. Его действие отличается: он ограничивает сигнал газа заданным уровнем. Любое отклонение стика выше установленного порога (например, 75 %) перестаёт влиять на значение газа — верхняя часть хода стика становится нечувствительной.
Логика отсечки в формализованном виде:
$$Throttle_{BF} = \min(Throttle_{stick}, Clip)$$
Максимальное значение ограничено, но при этом не достигается увеличения разрешения в рабочей зоне, а часть хода стика становится неэффективной.
По этой причине опция throttle limit clip в большинстве случаев является неоптимальной. Жертвовать частью хода стика без получения выигрыша в точности нерационально. Если требуется ограничить газ, более предпочтительным остаётся метод scale, поскольку он одновременно ограничивает верхний предел и увеличивает разрешение в реально используемом диапазоне.
2.3. Throttle expo и throttle mid: формирование «уплощённой» области в требуемой зоне газа
Ещё одна значительная, но часто недооцениваемая настройка — throttle expo. Она позволяет «уплощать» выбранную область кривой газа, обеспечивая повышенное разрешение именно в той зоне, где требуется особо точный контроль.
Используются два управляющих параметра:
- Throttle mid — определяет положение (в долях хода стика) центра «уплощённой» области.
- Throttle expo — задаёт степень выраженности уплощения.
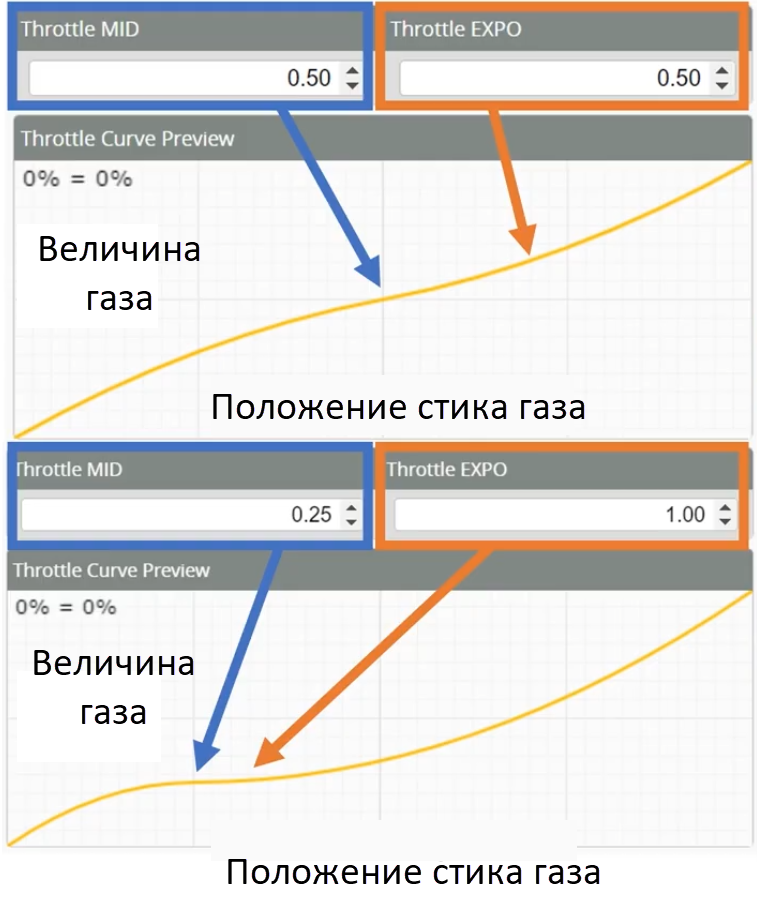
При установке throttle mid = 0.5 и throttle expo = 0.5 формируется заметно уплощённая область в районе 50 % хода стика. При throttle mid = 0.25 область уплощения смещается к 25 % хода. При увеличении throttle expo до 1.0 достигается сильно выраженная плоская область в окрестности mid, однако платой за это становится ухудшение разрешения в верхней и нижней частях диапазона.
В практической рекомендации, излагаемой в данном материале, предлагается целесообразный приём: установить throttle mid = 0. Тогда наиболее уплощённый участок кривой окажется в районе нулевого газа. Далее, изменяя throttle expo, пилот осуществляет компромисс: жертвует частью разрешения на полном газе ради получения большего разрешения на малом газе.
Обоснование такой рекомендации: при крейсерском полёте низко над землёй и вблизи препятствий разница между 5 % и 6 % газа может определить, произойдёт ли столкновение. В то же время разница между 98 % и 100 % газа зачастую не является критичной, поскольку в этой области тонкая гранулярность для большинства стилей полёта не столь важна.
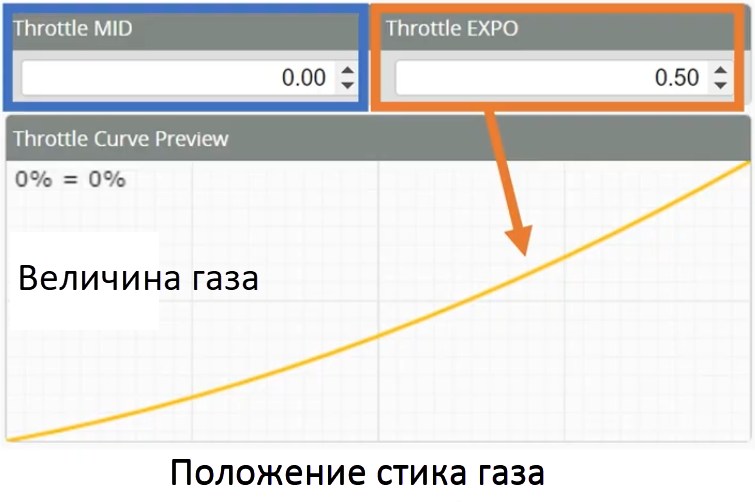
Rate profile settings — Throttle EXPO и Throttle MID (пример: MID=0.0 и подбор expo)
2.4. Причины повышенной ценности throttle scale и throttle expo при использовании мощных моторов
С увеличением мощности моторов проблема «излишне резкого газа» возникает чаще. В таких условиях throttle scale и throttle expo превращаются не просто в параметры комфорта, а в необходимые инструменты, позволяющие сохранить высокую управляемость на малом газу даже при очень мощной силовой установке. Если мотор обладает чрезвычайно высокой мощностью, именно эти настройки помогают сделать аппарат не нервным, а точным.
↑ К оглавлению3. RC smoothing: формирование плавного целевого значения (setpoint)
3.1. Функциональное назначение RC smoothing и его необходимость для стилей freestyle и cinematic
RC smoothing расположен в разделе Receiver и по своей сути представляет собой фильтрацию входного сигнала стиков. Он подавляет тремор пальцев, мелкие рывки, джиттер гимбальных датчиков и прочие высокочастотные составляющие, которые превращают setpoint в «неровную пилу». На выходе формируется более гладкий setpoint, и квадрокоптер начинает двигаться в соответствии с требованиями стилей freestyle и особенно cinematic: плавно, уверенно, без мелкой нервной ряби.
Важно понимать, что стандартная (дефолтная) настройка RC smoothing может быть ориентирована на стиль, где приоритетом являются максимальная прямота отклика и минимальная задержка (например, гонки). В данном подходе предполагается, что стандартная конфигурация в большей степени нацелена на racing, и для большинства не гоночных сценариев её следует скорректировать.
3.2. Базовая конфигурация: режим On и автоматический тип частот среза (Auto cutoff)
Базовая схема настройки RC smoothing включает следующие шаги:
- Установить режим сглаживания (smoothing mode) в состояние On.
- Установить setpoint cutoff type в значение Auto.
- Установить feedforward cutoff type в значение Auto.
- Затем выполнить подбор параметра auto factor.
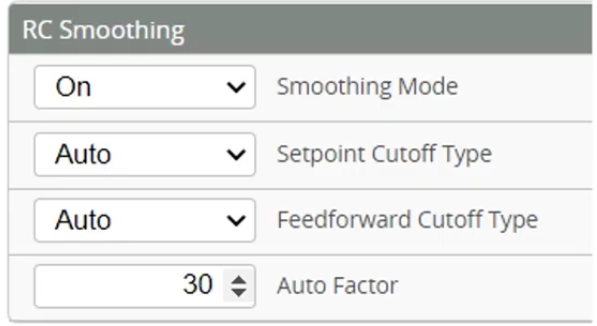
Receiver — RC smoothing: Mode=On, Setpoint cutoff type=Auto, Feedforward cutoff type=Auto
3.3. Auto factor: начальные ориентиры для freestyle и cinematic
Auto factor — это параметр, который подбирается в зависимости от стиля полёта. Для freestyle предлагается начальный диапазон значений примерно 50–60. Для cinematic рекомендуется начинать с существенно более высоких значений — примерно 90–100 — и затем увеличивать auto factor при необходимости достижения ещё более плавного характера управления.
Разница в рекомендуемых значениях значительна, поэтому оставление настроек «как есть» (по умолчанию) часто приводит к несоответствию ожидаемому плавному полёту. Следовательно, корректировка данного блока является обязательной для стилей freestyle и cinematic, если требуется визуально плавная картинка и спокойное управление.
↑ К оглавлению4. Rates: чувствительность в центре (center sensitivity), максимальная скорость вращения (max rate) и экспонента (expo) в модели Actual rates
4.1. Фактическое влияние рейтов на характер управления
Рейты (Rates) в Betaflight определяют, каким образом перемещение стика интерпретируется полётным контроллером. Большее значение рейта означает, что квадрокоптер будет вращаться быстрее при том же угле отклонения стика. Этим объясняется значительное влияние рейтов на восприятие управления («stick feel»): рейты буквально задают коэффициент преобразования «перемещение пальца → угловая скорость аппарата».
В рамках данного материала рассматривается модель Actual rates как актуальный тип рейтов, а параметры разбиваются на три ключевые составляющие: чувствительность в центре (center sensitivity), максимальную скорость (max rate) и экспоненту (expo).
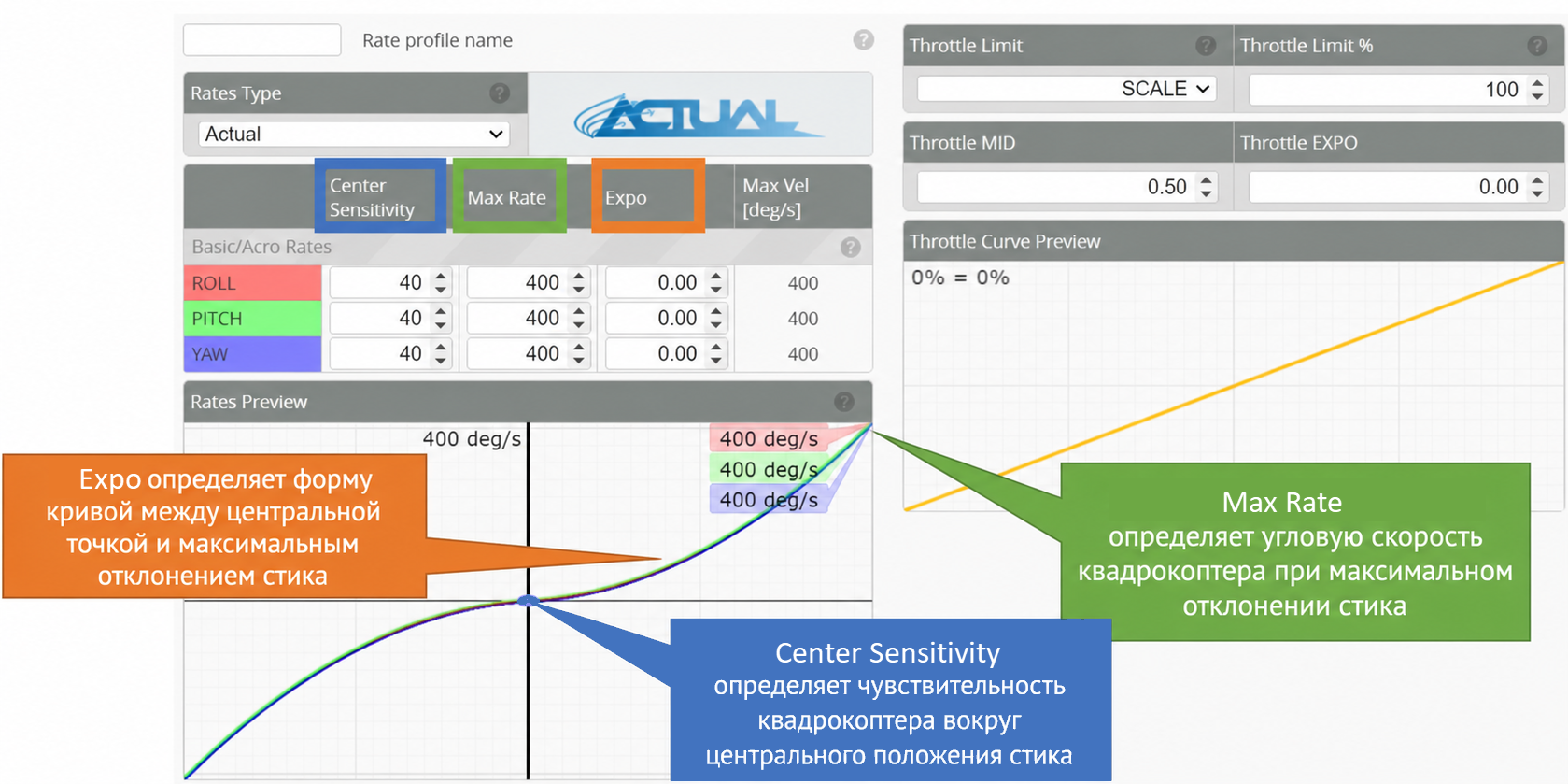
4.2. Center sensitivity: обеспечение точности без зоны нечувствительности
Center sensitivity отвечает за степень реакции квадрокоптера на малые отклонения стика от нейтрального положения. Именно этот параметр рекомендуется подбирать в первую очередь, поскольку при корректной чувствительности в центре аппарат движется в соответствии с ожиданиями пилота при выполнении микрокоррекций и аккуратных подруливаний.
По сути, это баланс между двумя крайностями: с одной стороны, требуется точность для маневрирования вблизи препятствий и удержания линии без излишней нервозности; с другой стороны, необходимо избежать ощущения «мёртвой зоны», когда небольшое отклонение стика не вызывает заметной реакции аппарата.
Рекомендуемые ориентиры в зависимости от стиля полёта:
- Для proximity, cinematic и полётов в ограниченном пространстве часто предпочтительна более низкая чувствительность в центре — примерно около 50.
- Для типичного freestyle подходит диапазон примерно 50–100.
- Для более динамичных стилей, некоторых видов полётов по визуальной линии (line‑of‑sight) и гонок (racing) может быть уместна повышенная отзывчивость в центре — примерно около 150.
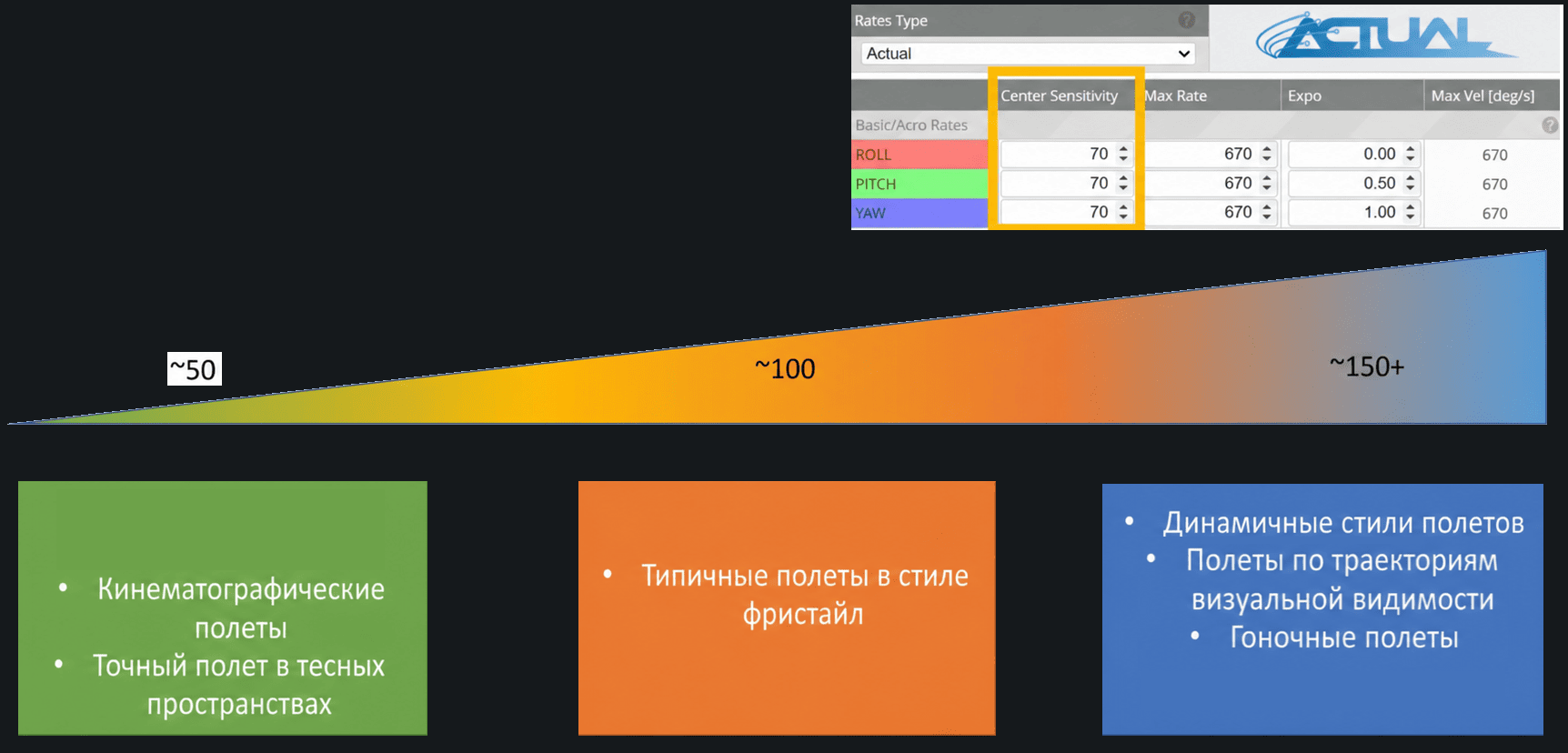
Center sensitivity (примеры: 50 / 100 / 150)
4.3. Max rate: угловая скорость при полном отклонении стика
Max rate определяет угловую скорость (в градусах в секунду), которую квадрокоптер достигает при полном отклонении стика по соответствующей оси. Важно найти оптимальное значение. Если max rate слишком низок, даже при полном отклонении стика аппарат не успевает выполнить требуемый трюк — возникает ощущение, что квадрокоптер «тянется» и не поспевает за командой.
Если max rate чрезмерно высок, возникает иная проблема: пилот перестаёт использовать полный ход стика, поскольку уже при 50 % отклонения аппарат вращается слишком быстро. Это негативно сказывается на контроле, так как теряется разрешение по стику — остаётся узкая рабочая зона, и каждое движение становится излишне грубым.
Рекомендуемые ориентиры:
- Для racing и cinematic‑freestyle значения max rate около 500 обычно более чем достаточны.
- Для более динамичного freestyle можно рассматривать значение около 700.
- Если требуется выполнение очень быстрых «snap‑flips» и «snap‑rolls», max rate может достигать примерно 1100.

Rate profile settings — Max rate (примеры: 500 / 700 / 1100)
4.4. Expo: управление формой кривой отклика между центром и краем хода стика
Expo (экспонента) управляет формой кривой отклика между центральным положением стика и максимальным отклонением. На практике экспонента позволяет смягчить реакцию в средней зоне или настроить переход от «точного управления» к «быстрому вращению» желаемым образом. Expo не следует рассматривать как обязательную корректировку; это инструмент формирования кривой. Когда center sensitivity и max rate уже находятся в адекватном диапазоне, expo позволяет довести характер управления до нужной «вязкости» и плавности по ощущению.
4.5. Методика подбора max rate: предпочтительность начального занижения
Практическая рекомендация по настройке max rate: начинайте с заведомо низких значений. Установите max rate примерно 400–500 и затем увеличивайте только при явном понимании, что квадрокоптеру не хватает скорости вращения.
Такой подход значительно эффективнее, чем изначально завышенный max rate. Добавить недостающую скорость вращения проще, чем затем обнаружить, что полный ход стика не используется, а разрешение управления искусственно снижено.
↑ К оглавлению5. Чек-лист усвоения материала (таблица)
Отмечайте пункты только при условии, что вы способны не только воспроизвести настройки, но и объяснить смысл каждого изменения: что именно происходит с setpoint, почему это влияет на характер управления и по каким признакам можно определить улучшение или ухудшение поведения аппарата.
| ✓ | Пункт усвоения | Критерий «усвоено» (проверяемый результат) |
|---|---|---|
| Понимание места рейтов и RC smoothing в общем потоке управления Betaflight. | Способность словесно описать цепочку «стики → приёмник → рейты/сглаживание → setpoint → PID → миксер → моторы» и объяснить, почему некорректный setpoint ухудшает восприятие управления даже при качественном PID. | |
| Знание расположения настроек рейтов и RC smoothing в конфигураторе. | Умение указать: PID Tuning → Rate profile settings для рейтов и Receiver для RC smoothing, а также найти нужные параметры без обращения к поисковым системам. | |
| Понимание того, почему throttle является одним из наиболее критичных каналов для уверенного полёта вблизи земли и препятствий. | Возможность объяснить, что точность управления газом напрямую влияет на контроль высоты и уверенность пилота, и что высокая детализация (гранулярность) на малом газу часто важнее, чем на полном газу. | |
| Понимание принципа действия throttle limit scale. | Способность объяснить, что scale уменьшает максимальное значение газа по стику и увеличивает разрешение в рабочем диапазоне, при этом полётный контроллер сохраняет возможность потребовать от моторов полной мощности для целей управления. | |
| Понимание причин, по которым throttle limit clip обычно невыгоден. | Умение объяснить, что clip превращает верхнюю часть хода стика в нечувствительную зону, не увеличивая разрешения в наиболее часто используемой области, поэтому при необходимости лимитирования газа предпочтительнее использовать scale. | |
| Понимание назначения throttle expo и throttle mid. | Способность объяснить, что throttle mid задаёт положение центра уплощённой области, throttle expo — силу эффекта, и описать компромисс: повышение точности в одной зоне ценой снижения точности в другой. | |
| Способность осознанно выбрать значение throttle mid = 0 для повышения разрешения на малом газу. | Возможность объяснить, почему точность на 5–6 % газа критична при полётах вблизи препятствий, а потеря тонкости на 98–100 % газа для многих стилей не является проблемой. | |
| Понимание того, почему мощные моторы делают throttle scale и throttle expo особенно полезными. | Способность объяснить, что высокая мощность силовой установки усиливает нервозность на малом газу, и применение scale/expo позволяет вернуть точную управляемость без ощущения избыточной мощности. | |
| Понимание функционального назначения RC smoothing и того, какие именно помехи он фильтрует. | Умение объяснить, что RC smoothing сглаживает входной сигнал стиков, подавляя тремор пальцев и джиттер гимальных датчиков, тем самым делая setpoint более гладким, что ценно для freestyle и cinematic. | |
| Способность выполнить базовую настройку RC smoothing (режим On и автоматические типы частот среза). | Установка smoothing mode = On, setpoint cutoff type = Auto, feedforward cutoff type = Auto и понимание того, что далее подбирается параметр auto factor. | |
| Понимание смысла auto factor и знание начальных ориентиров для разных стилей. | Воспроизведение логики: для freestyle стартовый диапазон 50–60; для cinematic старт 90–100 с последующей подстройкой, а также понимание того, что стандартные настройки могут не соответствовать требуемому характеру полёта. | |
| Понимание того, что рейты определяют интерпретацию стика и скорость вращения квадрокоптера. | Способность объяснить, что большее значение рейта даёт более высокую угловую скорость при том же отклонении стика и что это непосредственно формирует восприятие управления. | |
| Понимание роли center sensitivity и умение подобрать его под стиль полёта. | Объяснение баланса между точностью в ограниченном пространстве и отсутствием мёртвой зоны, а также знание ориентиров: ~50 для точного proximity/cinematic, 50–100 для freestyle, ~150 для более резких или гоночных стилей. | |
| Понимание роли max rate и умение подобрать его так, чтобы использовался полный ход стика. | Объяснение двух крайностей: слишком низкое значение — недостаточная скорость для выполнения трюков; слишком высокое — неиспользование полного хода и потеря разрешения, что ухудшает контроль. | |
| Понимание ориентиров по max rate для разных стилей и умение начать настройку с заниженного значения. | Воспроизведение рекомендации: старт с 400–500, дальнейшее повышение по необходимости; ориентиры: ~500 для racing/cinematic, ~700 для динамичного freestyle, ~1100 для очень быстрых «snap»-движений. | |
| Понимание роли expo как средства управления формой кривой между центром и краем хода стика. | Способность объяснить, что expo — это инструмент настройки формы отклика, который применяется после того, как center sensitivity и max rate приведены в адекватную зону, для достижения желаемого характера управления. |
