
Руководство по настройкам в Betaflight
Пилоту БПЛА
Понедельник, 06 октября 2025
Необходимо установить Betaflight Configurator для вашей операционной системы. Конфигуратор будет использоваться для настройки параметров полетного контроллера.
Подробную инструкцию по настройке прошивки можно найти здесь.
Подключение к полетному контроллеру
После установки и запуска конфигуратора вы увидите следующий экран:
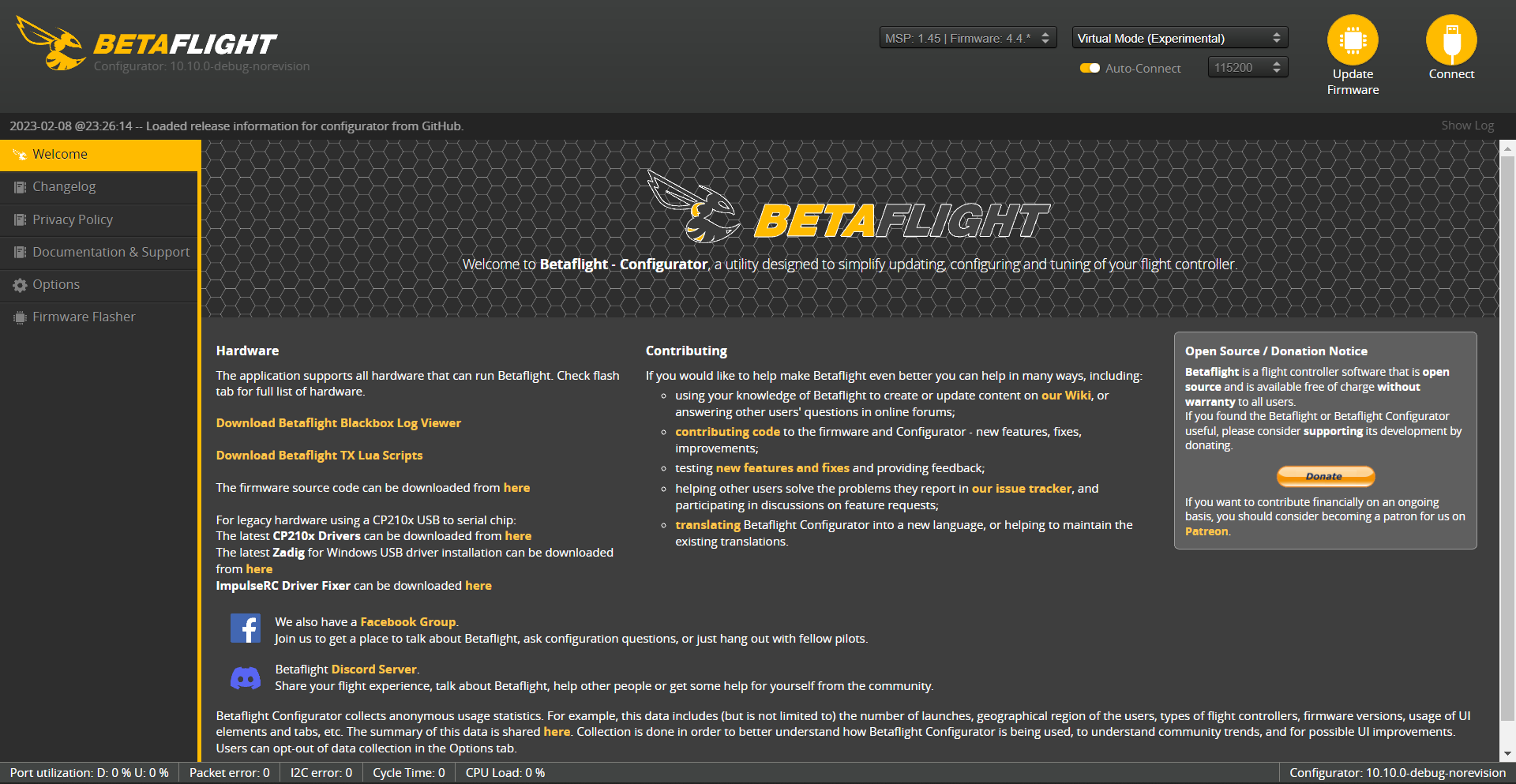
BETAFLIGHT
Добро пожаловать в Betaflight Configurator — утилиту, предназначенную для упрощения обновления конфигурации вашего полетного контроллера.
Аппаратное обеспечение
Приложение поддерживает все аппаратное обеспечение, способное запускать Betaflight. Полный список оборудования смотрите во вкладке "Flash" (Прошивка).
Скачать Betaflight: Blackbox Log Viewer
Скачать Betaflight: TK Lua Scripts
Исходный код прошивки можно скачать отсюда.
Для устаревшего оборудования, использующего драйвер CP210x USB, см. http://TK-lua.cz/CPID. Драйверы принтеров можно скачать отсюда. Последний драйвер Zadig для установки USB-драйверов Windows можно скачать с https://impulserc.com/pages/downloads.
Открытый исходный код / Подробная информация
Betaflight — это программное обеспечение для полетного контроллера с открытым исходным кодом, доступное бесплатно без навязывания пользователю.
Вам необходимо подключить полетный контроллер к компьютеру, обычно через USB. Если все прошло успешно, вы увидите новый COM-порт в выпадающем списке в правом верхнем углу:
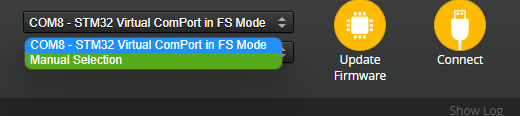
Когда COM-порт выбран, нажмите кнопку "Connect" (Подключиться).
Не отображается/Не подключается?
Если вы не видите новый COM-порт или конфигуратор не может подключиться, есть несколько способов решения:
- Убедитесь, что вы подключаете USB-кабель непосредственно к полетному контроллеру, и ни к чему другому. Не подключайте Betaflight Configurator к системе HD (видео). Не подключайте Betaflight Configurator к радиопередатчику. Betaflight Configurator предназначен ТОЛЬКО для работы с полетным контроллером.
- Убедитесь, что вы используете USB-кабель, способный передавать данные. Некоторые USB-кабели предназначены только для зарядки.
- Вам может потребоваться установить драйверы для вашего полетного контроллера. В конфигураторе есть ссылка для скачивания инструмента ImpulseRC Driver Fixer, или вы можете скачать его отсюда.
- Если проблемы сохраняются, попробуйте закрыть/удалить любое другое ПО, которое может использовать COM-порт. ПО для 3D-печати — частый виновник.
Не спешите прошивать!
Если вы приобрели готовый дрон, весьма вероятно, что производитель уже предварительно настроил большую часть необходимых параметров на полетном контроллере, и прошивка вернет его в полностью ненастроенное состояние. Даже если вы собираете дрон самостоятельно, полетный контроллер может быть настроен с конфигурацией по умолчанию, которая, возможно, необходима для некоторых функций. Пока что просто подключитесь.
Основные настройки
Теперь, когда вы подключились к полетному контроллеру, вам нужно выполнить несколько основных шагов настройки, чтобы подготовить дрон к полету. Мы пройдемся по настройке каждой части дрона, и к концу вы должны быть готовы летать с Betaflight и, надеюсь, лучше понимать, как все это работает.
После подключения к полетному контроллеру вы окажетесь на вкладке "Setup" (Настройка). Когда вы перемещаете полетный контроллер, вы должны видеть, как 3D-модель движется в конфигураторе. Это хороший базовый признак того, что полетный контроллер жив и работает. Находясь здесь, вы можете откалибровать гироскоп и акселерометр с помощью кнопок и следуя инструкциям. Вы также можете откалибровать магнитометр, но для полетов это не обязательно, и его у вас может даже не быть.
Сделайте резервную копию конфигурации
Перед внесением любых изменений важно создать резервную копию текущей конфигурации. Это защитит вас на случай ошибок и позволит вернуться к исходным настройкам при необходимости. Для этого перейдите на вкладку "CLI" и отправьте команду diff all или dump. Затем скопируйте вывод или сохраните его в файл для дальнейшего использования.
Настройки приемника (Receiver)
Первый шаг настройки — настройка вашего приемника. Если вы используете готовый дрон, вам нужно выяснить, куда приемник подключен к полетному контроллеру. Если вы собираете дрон самостоятельно, вы, надеюсь, уже знаете, где он находится. Приемник, чьи сигнальные провода подключены к, например, паре контактов RX1/TX1 на полетном контроллере, будет использовать UART1. RX2/TX2 — это UART2 и т.д. Эта информация нужна для настройки приемника во вкладке "Ports" (Порты). Включите опцию "Serial RX" на том UART, к которому подключен ваш приемник.
Внимание (caution)
Переключатель MSP (MSP switch) НЕ используется для выбора ("переключения") текущего UART при настройке, например, Serial RX. Это относительно распространенная ошибка, которая может привести к невозможности сохранения конфигурации или нежелательному поведению из-за конфликтующих настроек.
Информация (info)
Если ваш полетный контроллер имеет встроенный SPI-приемник, вам не нужно настраивать для него UART. Вы можете просто настроить его на вкладке "Receiver" (Приемник).
Теперь, когда опция "Serial RX" включена, вам нужно установить специфичные для вашего приемника настройки на вкладке "Receiver". Используете ли вы готовый дрон или собираете свой, вы, надеюсь, знаете, какой приемник используете. Затем вы можете следовать инструкциям ниже для вашего приемника:
UART-приемники
Если вы используете приемник на основе UART, вам нужно установить выпадающий список "Receiver Mode" (Режим приемника) в положение "Serial (via UART)" (Последовательный (через UART)), а выпадающий список "Serial Receiver Provider" (Протокол последовательного приемника) — в соответствующий протокол, основанный на вашем приемнике. Вот наиболее распространенные варианты:
- ELRS/Crossfire/Tracer - CRSF
- FrSky - SBUS / FPort
- Spektrum - Spektrum1024 / Spektrum2048 / Spektrum SRXL2
- FlySky - IBUS
SPI-приемники
Если вы используете приемник на основе SPI, вам нужно установить выпадающий список "Receiver Mode" (Режим приемника) в положение "SPI Rx" (например, "built-in Rx" (встроенный Rx)), а выпадающий список "SPI Bus Receiver Provider" (Протокол SPI приемника) — в соответствующий протокол, аналогично UART-приемникам. Вот наиболее распространенные варианты:
- ELRS - EXPRESSLRS
- FrSky - FrSky_D для D8, FrSky_X(_LBT) для ACCST D16, FrSky_X_V2(_LBT) для ACCST V2 D16
- Spektrum - SPEKTRUM
- FlySky - A7105_FLYSKY(_2A)
После правильной настройки вы должны видеть изменение значений каналов и движение 3D-модели в ответ на движения стиков. Если ваши каналы не выровнены должным образом, соответствующим образом отрегулируйте опцию "Channel Map" (Карта каналов).
Настройки VTX (Видеопередатчик)
В большинстве видеосистем вам не нужно делать что-либо в Betaflight для простой работы видео. Однако, чтобы получить что-то большее, чем просто базовый видеовыход (управление VTX, OSD-информация для цифровых систем), вам потребуется настроить параметры VTX.
Аналоговые VTX
Аналоговое видео — более или менее самая распространенная видеосистема, несмотря на свой возраст. Это простая система, которая обычно "просто работает" без какой-либо конфигурации. Однако, если вы хотите изменить канал, мощность или другие настройки, вам нужно настроить SmartAudio или Tramp во вкладке "Ports" (Порты).
Включите SmartAudio или Tramp как периферийное устройство на том UART, к которому подключен ваш VTX (вы, надеюсь, это знаете). Затем вы можете настроить VTX на вкладке "VTX". Это может показаться сложным, но если вы используете достаточно распространенный VTX, вы сможете найти "VTX Table" (Таблицу VTX) для него в интернете или даже найти готовый пресет в конфигураторе.
Когда вы найдете таблицу VTX онлайн, она может быть в двух форматах:
- CLI-код — Этот формат можно скопировать и вставить в CLI конфигуратора, обычно он представлен в виде текста. Он будет выглядеть примерно так:
# vtxtable vtxtable bands 5 vtxtable channels 8 vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5885 5785 5765 5745 5725 vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5799 5899 5828 5847 5866 vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5645 5645 5885 5905 5925 5945 vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880 vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917 vtxtable powerlevels 5 vtxtable powervalues 25 100 200 400 600 vtxtable powerlabels 25 200 500 1.5 2.5
- JSON — Этот формат можно скопировать и вставить или загрузить в раздел "VTX Table" конфигуратора. Обычно это файл для скачивания, но его также можно найти в виде простого текста для копирования и вставки. Он будет выглядеть примерно так:
{
"description": "Betaflight VTX Config file for Rush Tank Ultimate",
"version": "1.0",
"vtx_table": {
"bands_list": [
{
"name": "BAND_A ",
"letter": "A",
"is_factory_band": true,
"frequencies": [5865, 5845, 5825, 5805, 5785, 5765, 5745, 5725]
}
// ... more bands
],
"powerlevels_list": [
{
"value": 0,
"label": "25 "
},
{
"value": 1,
"label": "200"
}
// ... more power levels
]
}
}
Если вы не можете найти ни пресет, ни таблицу VTX, вы можете просмотреть руководство для вашего VTX, чтобы найти необходимые настройки.
Цифровые VTX
Цифровые VTX — это более новая форма видеосистемы, становящаяся все более распространенной. Она немного сложнее аналоговой и требует настройки для работы OSD и управления VTX.
Начните во вкладке "Ports", включив VTX (MSP + Displayport) как периферийное устройство на том UART, к которому подключен ваш VTX. Это должно автоматически включить и MSP. Если у вас версия старше 4.4, вам нужно будет включить только MSP и следовать дальнейшим инструкциям.
Затем во вкладке "Presets" (Пресеты) есть несколько системно-специфичных пресетов, которые можно использовать для упрощения настройки:
- HDZero для 4.2/4.3 и 4.4
- Avatar 4.2/4.3
- FPV.WTF MSP OSD 4.2/4.3
- FPV.WTF + O3 + Avatar для 4.4
Для получения дополнительной информации о новейшей прошивке (4.4) прочитайте Примечания к выпуску (Release Notes).
Настройки моторов (Motor Settings)
По сравнению с другими настройками, настройки моторов довольно просты. На вкладке "Motors" (Моторы) начните с установки выпадающего списка "ESC/Motor Output" (Выход ESC/Моторов) в правильный протокол. Обычно это DShot300 или DShot600 для большинства современных ESC.
Информация (info)
Выбор правильной скорости DShot:
- DShot300 лучше подходит для FC с более медленными процессорами, например платы F411. DShot600 лучше для более быстрых процессоров, таких как любое семейство F7. F405 тоже может работать, но это может вызвать слишком высокую нагрузку на ЦП (CPU load), когда используется много периферийных устройств.
- Скорость DShot также зависит от скорости гироскопа (и, следовательно, также от скорости PID-цикла). Если у вас гироскоп, работающий на 8 кГц (MPU6000), вы можете использовать DShot600. Если у вас гироскоп, работающий на 3.2 кГц (BMI270), вам следует использовать DShot300. Использование более высоких скоростей DShot на более медленных гироскопах не должно вызывать проблем, но и не даст никаких преимуществ.
После установки протокола вам необходимо снять пропеллеры (если вы еще этого не сделали) и подключить аккумулятор. Установите флажок, подтверждающий, что вы это сделали, а затем вы можете медленно поднять главный ползунок "Master", чтобы увидеть, как моторы начинают вращаться. Они могут немного дергаться при низких значениях ползунка, но должны плавно раскручиваться при немного более высоких значениях. Проверьте, что все моторы вращаются в правильном направлении, установленном переключателем "Motor direction is reversed" (Направление моторов обратное), также известным как "Props in" (Пропы внутрь) или "Props out" (Пропы наружу), см. изображение ниже.
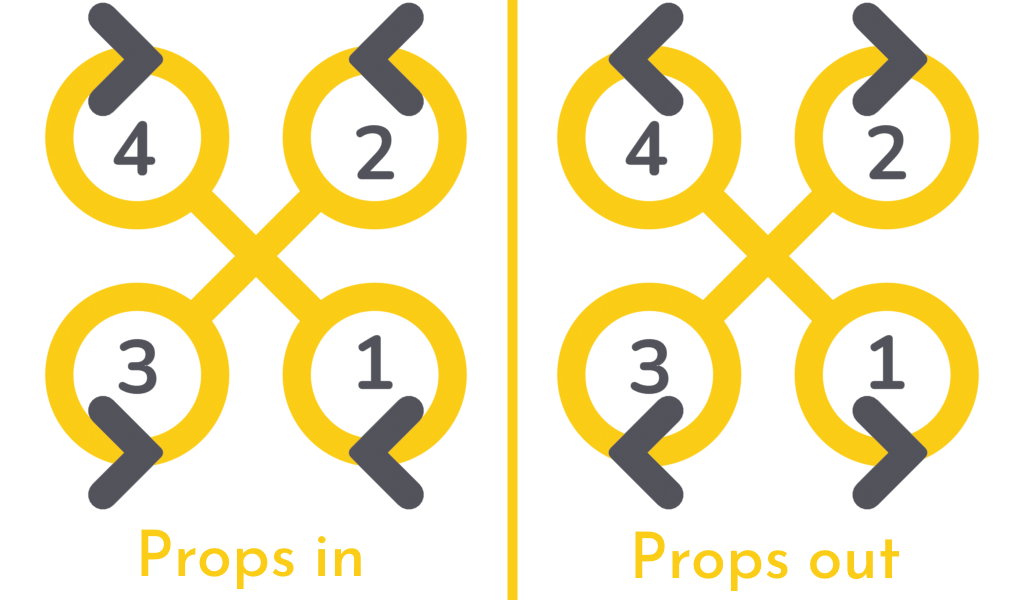
Если они вращаются в неправильном направлении, вы можете изменить их направление во всплывающем меню "Motor direction" (Направление моторов). Если моторы не соответствуют номерам моторов, вам придется переназначить их с помощью "Resource Remapping" или "Motor Mapping".
Настройки режимов (Mode Settings)

Режимы служат для изменения поведения или действия вашего квадрокоптера в полете с использованием AUX-каналов в качестве входов. На вкладке "Modes" (Режимы) вы увидите список всех доступных режимов.
Начнем с единственного, который вам теоретически необходим:
| Режим (Mode) | Канал (AUX) | Диапазон (Range) |
|---|---|---|
| ARM | AUX 1 | Min: 1700, Max: 2100 |
Добавить диапазон (Add Range)
Режим ARM служит для активации PID-цикла и позволяет моторам вращаться. Обычно он назначается на переключатель.
- Нажмите на Добавить диапазон (Add Range). Это добавит ползунок к режиму, который вы можете использовать для установки диапазона активации режима. Это диапазон из двух значений: когда значение назначенного AUX-канала находится между ними, режим будет активен. По умолчанию диапазон будет посередине (например, 1300-1700).
- Выпадающий список с надписью AUTO предназначен для выбора AUX-канала. В положении AUTO он автоматически выберет AUX-канал, который вы измените. Переключите нужный вам переключатель для постановки на охрану (arming), и выпадающий список изменится на этот канал. Если вы хотите использовать другой канал, выберите его вручную.
- Маленький индикатор внизу ползунка показывает текущее значение AUX-канала. Переведите переключатель в положение, в котором вы хотите ставить коптер на охрану, и переместите диапазон, чтобы он охватывал положение индикатора.
После настройки диапазона для режима ARM повторите процесс для других режимов. Вам, скорее всего, также понадобятся:
- BEEPER (Зуммер) - Активирует зуммер (и моторы, если настроено) для подачи звукового сигнала.
- ANGLE (Угловой режим) - Режим стабилизации по углу.
Подсказка (tip)
Режим полета по умолчанию называется Acro (иногда Rate Mode). Как следует из названия, это режим, в котором положение стиков управляет скоростью вращения коптера. Это режим, который вы захотите использовать для большей части полетов. Активация любого другого режима полета отменяет Acro.
Angle Mode — это режим, в котором положение стиков управляет углом наклона коптера. Это полезно в аварийных ситуациях или для новичков, которые еще не освоились с Acro-режимом.
- FLIP OVER AFTER CRASH (Переворот после падения) - Реверсирует моторы, чтобы перевернуть коптер, если он упал вверх ногами.
Этот режим может быть очень требовательным к моторам и ESC, если моторы заблокированы после падения, и может привести к выходу из строя ESC или моторов (вплоть до возгорания). Рекомендуется использовать этот режим только если вы уверены, что это более или менее безопасно.
Настройки OSD (OSD Settings)
OSD (On-Screen Display) позволяет отображать информацию в видеопотоке с вашего квадрокоптера. На вкладке "OSD" вы можете настроить различные элементы, которые будут отображаться.
Слева находится список всех элементов, а рядом с ним — три столбца флажков. Каждый столбец соответствует одному профилю OSD. Профили OSD позволяют иметь разные макеты для разных ситуаций и легко переключаться между ними. Включение флажка для элемента в первом столбце включает его для первого профиля OSD, во втором столбце — для второго профиля и т.д.
Когда вы включаете элемент, он появляется в предварительном просмотре, и вы можете перетаскивать его для перемещения. Также есть некоторые настройки для конкретных элементов, такие как выбор единиц измерения, источник для таймеров и различные предупреждения для отображения или игнорирования.
У вас должны быть включены как минимум следующие элементы:
- Warnings (Предупреждения) - Отображает предупреждения о низком заряде батареи, низком уровне RSSI и другие.
- Battery average cell voltage (Среднее напряжение ячейки батареи) - Отображает среднее напряжение ячейки батареи независимо от количества элементов.
- Link quality, RSNR Value, RSSI Value, RSSI d8m Value (Качество связи, Значение RSNR, Значение RSSI, Значение RSSI d8m) - Различные способы измерения силы и/или качества радиосвязи. Выберите тот, который лучше всего работает с вашей радиосистемой; обычно это можно найти в документации производителя.
Готов к полету! (Ready to Fly)
После выполнения всех настроек вы должны быть готовы к полету! Проведите окончательную проверку, чтобы убедиться, что все в порядке, и выполните быстрый тест на зависание, чтобы убедиться, что все работает должным образом.
Если что-то не работает, просмотрите это руководство — здесь должны быть перечислены некоторые из наиболее распространенных ошибок. Если не здесь, вы можете прочитать страницу устранения неполадок, чтобы найти решение. Если вы не можете найти его, спросите на Discord-сервере сообщества.
Внешние URLs:
Добавить комментарий